Геодезическое обеспечение кадастровых работ с использованием GPS технологий. Электронный курс лекций презентация
- Геодезическое обеспечение кадастровых работ с использованием GPS технологий. Электронный курс лекций

Содержание
- 2. Назначение глобальных систем спутникового позиционирования (ГССП) и их предшественники ГССП предназначены для определения пространственных координат (позиционирование)
- 3. ГЛОНАСС (Глобальная Навигационная Система) Разработка системы начата в середине 1970-х. Развертывание начато в 1982 г. Принята
- 4. Космический сегмент Сегмент пользователя Сегмент контроля и управления Наземный сегмент Общая структура ГССП GPS и ГЛОНАСС
- 5. Принцип работы системы Базовые станции принимают сигналы ГНСС; 2. Измерительная информация от базовых станций непрерывно передается
- 6. Основные преимущества системы - Задание единого координатно-временного пространства (создание геодезической основы); - Согласованность результатов топографо-геодезических работ;
- 7. Две системы координат… Две полевые бригады… Отсутствие общей инфраструктуры…
- 8. Геодезия и маркшейдерия Кадастровые работы Строительство Деформационный мониторинг Гидрография и портовые операции Точное земледелие Управление строительной
- 9. 1. Рекогносцировочные работы; 2. Закладка пунктов сети базовых станций; 3. Установка Вычислительного Центра и организация каналов
- 10. Общие требования к установке базовых станций Открытый небосвод
- 11. * в настоящее время активны 30 GPS SV’s и 17 ГЛОНАСС SV’s Космический сегмент систем GPS
- 12. Космический сегмент систем GPS и ГЛОНАСС Подсистема космических аппаратов ГЛОНАСС Подсистема космических аппаратов GPS
- 13. Космический сегмент систем GPS и ГЛОНАСС ГЛОНАСС спутник GPS satellite, BLOCK IIA GPS satellite, BLOCK IIR
- 14. Сегмент контроля и управления системой GPS Колорадо- Спрингс о. Гавайи о. Вознесения о. Диего-Гарсия атолл Кваджалейн
- 15. Сегмент контроля и управления системой ГЛОНАСС
- 16. * в настоящее время выведены на орбиту 2 SV’s Европейская глобальная навигационная система GALILEO (планируется к
- 17. Общий вид спутника системы GALILEO
- 18. Наземный сегмент (сеть IGS)
- 21. Принципы определения местоположения при помощи ГССП GPS и ГЛОНАСС Фундаментальное уравнение космической геодезии (ФУКГ) Матрица масштабов
- 22. Принципы определения местоположения при помощи ГССП GPS и ГЛОНАСС Геометрическая интерпретация (пространственная линейная засечка) Абсолютное позиционирование
- 23. (а) (б) Схемы определения координат спутника (а) и наземного пункта (б). Прямая и обратная геодезическая засечка
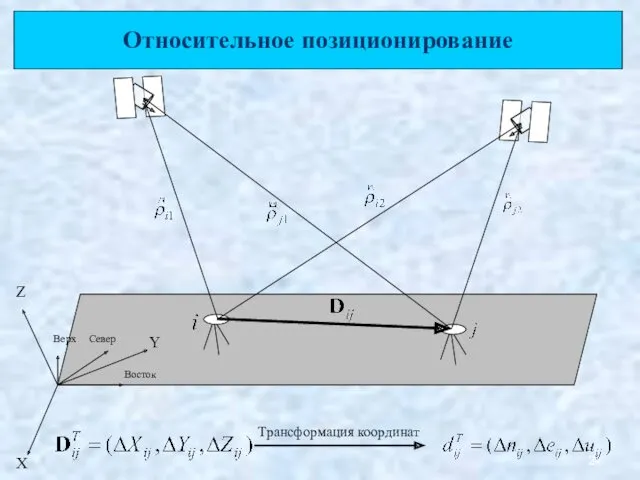
- 24. Север Восток Верх X Y Z Трансформация координат Относительное позиционирование
- 25. Мы измерили базовую линию Трансформирование разностей геоцентрических координат в локальную ТПСК Известны геодезическая широта и долгота
- 26. Сигналы, излучаемые спутниками GPS и ГЛОНАСС и их назначение Немодулированный сигнал (несущая) Назначение несущих сигналов: 1.
- 27. Модулирование несущих сигналов в ГССП GPS и ГЛОНАСС Дальномерные коды и другая необходимая информация, встраиваются в
- 28. Генератор опорной частоты f0=10.23 МГц f0/10 Принципы формирования и виды сигналов, излучаемые спутниками GPS f0 154f0
- 29. Генератор опорной частоты f0=5.11 МГц f0/10 Принципы формирования и виды сигналов, излучаемые спутниками ГЛОНАСС f0 Упрощенная
- 30. Формирование дальномерных кодов (ПСП-последовательностей) Простейший сдвиговый регистр обратной связи Вход (тактовый сигнал) Выход (PRN-code) Правила сложения
- 31. Формирование C/A-code в GPS
- 32. Пропускание радиоволн атмосферой Земли
- 33. Системное время GPS и ГЛОНАСС не совпадает с международными шкалами времени TAI (Time Atomic International), UT
- 34. Размещение информации в БД сети IGS
- 35. Основные методы определения псевдодальностей Кодовый метод точность получения псевдодальностей 0.3 – 0.6 м. Фазовый метод точность
- 36. Излученный спутниковый сигнал (ПСП) Принятый спутниковый сигнал Сигнал, сгенерированный в приемнике Часы приемника tr Часы спутника
- 37. Параметры ПСП кодов стандартной точности
- 38. Излученный спутниковый сигнал (несущая) Принятый спутниковый сигнал Сигнал, сгенерированный в приемнике Часы приемника tr Часы спутника
- 39. Случайные («белый шум») влияние минимизируется путем осреднения результатов измерений Систематические («смещения») неустранимы путем осреднения результатов измерений
- 40. Влияние ошибок эфемерид спутников GPS и ГЛОНАСС на точность позиционирования
- 41. 50 – 1000 км 0 – 50 км Ионосфера Тропосфера Атмосферная рефракция Земля
- 42. Влияние ионосферы на результаты GPS и ГЛОНАСС измерений Искажение псевдодальности, обусловленное влиянием ионосферы δPIono может принимать
- 43. Важнейшие линейные комбинации GPS/ГЛОНАСС измерений и «уничтожение» эффекта TEC Пусть измерены дробные части разности фаз спутникового
- 44. Влияние тропосферы на результаты GPS и ГЛОНАСС измерений Искажения во влажном слое: - по величине Тропосферные
- 45. Учет влияния тропосферы на результаты GPS и ГЛОНАСС измерений Моделирование тропосферы (менее трудоемко и более просто,
- 46. Моделирование тропосферы К настоящему времени разработано большое количество моделей тропосферы, например, модели Хопфилда (Hopfield,1969), Саастамоинена (Saastamoinen,
- 47. Антенна Поверхность Отраженный сигнал Прямой сигнал h h Отображение антенны Излишне пройденный сигналом путь Влияние эффекта
- 48. Пример плоского экрана-отсекателя и экранов типа Choke-Ring Влияние многолучевости на результаты обработки фазовых GPS измерений
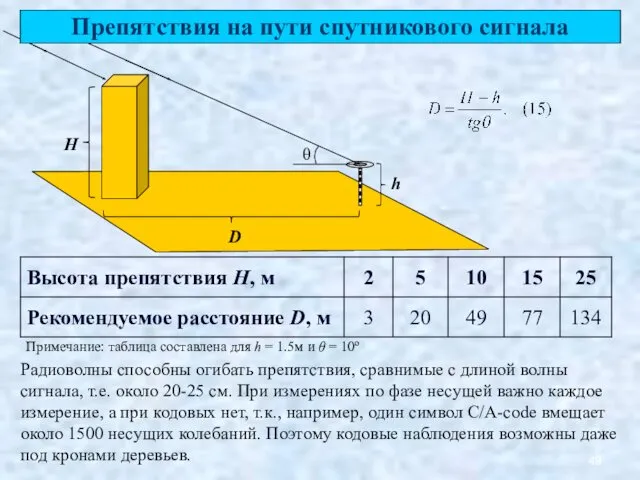
- 49. H h D θ Препятствия на пути спутникового сигнала Примечание: таблица составлена для h = 1.5м
- 50. Влияние нестабильности и неточного знания положения фазового центра антенны на результаты GPS/ГЛОНАСС позиционирования Вариации фазового центра
- 51. Калибровка GPS/ГЛОНАСС
- 52. Геометрический фактор (DOP) и его влияние на результаты GPS/ГЛОНАСС позиционирования DOP является связующим звеном между точностью
- 53. Формирование разностей спутниковых измерений A B i j Пусть на пунктах А и В одновременно измеряются
- 54. Способы и режимы позиционирования
- 55. Контрольно-корректирующая (ККС) или базовая станция (БС) Потребители Вычисление поправок (коррекций) к псевдодальностям Трансляция поправок Вычисление скорректированных
- 56. Способы инициализации кинематики Цель инициализации – разрешение неоднозначности фазовых измерений. 1). По известной точке (координаты которой
- 57. Особенности построения геодезических GPS/ГЛОНАСС сетей Известное правило геодезии – «от общего к частному» – полностью справедливо
- 58. Особенности построения геодезических GPS/ГЛОНАСС сетей Необходимо стремиться к выполнению независимых и однородных измерений в спутниковой сети,
- 59. Общая концепция уравнивания GPS/ГЛОНАСС сетей Пусть измерено n величин, истинные значения которых X1, X2, …, Xn,
- 60. Условия, возникающие в GPS/ГЛОНАСС сетях В качестве измеренных величин при уравнивании GPS/ГЛОНАСС сетей обычно используются компоненты
- 61. Цели уравнивания геодезических GPS/ГЛОНАСС сетей Задача уравнивания возникает только при наличии в сети избыточно измеренных величин!!!
- 62. Виды ошибок GPS/ГЛОНАСС измерений Грубые ошибки (промахи) Примеры: - ввод ошибочных координат пункта; - ввод ошибочного
- 63. Абсолютная точность и внутренняя сходимость результатов GPS/ГЛОНАСС измерений Абсолютная точность (accuracy) характеризует степень близости результатов измерений
- 64. Оценка точности компонент базовой линии по внутренней сходимости результатов GPS измерений
- 65. Поправки, нормальное распределение поправок, нормированные поправки Поправка – это разность между уравненным значением измеряемой величины и
- 66. Ковариационная матрица. Среднеквадратическая ошибка единицы веса (Reference Factor). Структура ковариационной матрицы i-й базовой линии, полученная в
- 67. Математический смысл среднеквадратической ошибки единицы веса (СКОЕВ) Можно показать, что: - если СКОЕВ=1, ошибки уравненных измерений
- 68. Результаты оценки точности компонент базовых линий (краткий отчет)
- 69. Схема расположения пунктов ФАГС (1999-2003гг.)
- 70. Схема расположения пунктов ФАГС (1999-2003гг.)
- 71. Схема расположения пунктов ОГС
- 72. Существующий порядок обработки GPS измерений Единая СК
- 73. «Идеальная» схема обработки GNSS измерений Уравнивание сети в единой геоцентрической СК (например, ITRF2005) Используется для: -
- 74. Уравнивание геодезических GPS/ГЛОНАСС сетей Свободное (минимально ограниченное) уравнивание Используется для: - контроля качества и оценки точности
- 75. Трансформация результатов GPS/ГЛОНАСС измерений в заданную систему координат Цель трансформации – преобразование результатов GPS/ГЛОНАСС позиционирования в
- 76. Трансформация плановых координат α α ycosα xsinα c2 c1
- 77. Одна из возможных схем трансформации плановых координат из системы WGS-84 в систему координат пользователя Преобразование геоцентрических
- 78. Трансформация высот ζ H = H γ + ζ α1 α2 α3 ∆h H– H γ
- 79. Одна из возможных схем трансформации высот из системы WGS-84 в систему координат пользователя Преобразование геоцентрических координат
- 80. Упрощенная принципиальная схема устройства и функционирования спутникового приемника Антенный блок Блок питания Радиочастотный блок ___________________________ Блок
- 81. Классификация спутникового оборудования Системная классификация. 1) Односистемные (обычно ориентированы на GPS); 2) Двухсистемные (GPS и ГЛОНАСС).
- 82. ПРАКТИЧЕСКАЯ ЧАСТЬ Общие рекомендации по выполнению геодезических GPS/ГЛОНАСС измерений При практическом выполнении спутниковых наблюдений следует соблюдать
- 83. Параметры, которые необходимо контролировать при выполнении GPS/ГЛОНАСС измерений 1) Количество непрерывно отслеживаемых спутников (желательно чтобы их
- 85. Скачать презентацию
Назначение глобальных систем спутникового позиционирования (ГССП) и их предшественники
ГССП предназначены для
Назначение глобальных систем спутникового позиционирования (ГССП) и их предшественники
ГССП предназначены для
ГЛОНАСС (Глобальная Навигационная Система)
Разработка системы начата в середине 1970-х.
Развертывание начато
ГЛОНАСС (Глобальная Навигационная Система) Разработка системы начата в середине 1970-х. Развертывание начато

Космический сегмент
Сегмент пользователя
Сегмент контроля
и управления
Наземный сегмент
Общая структура ГССП GPS и
Космический сегмент
Сегмент пользователя
Сегмент контроля
и управления
Наземный сегмент
Общая структура ГССП GPS и
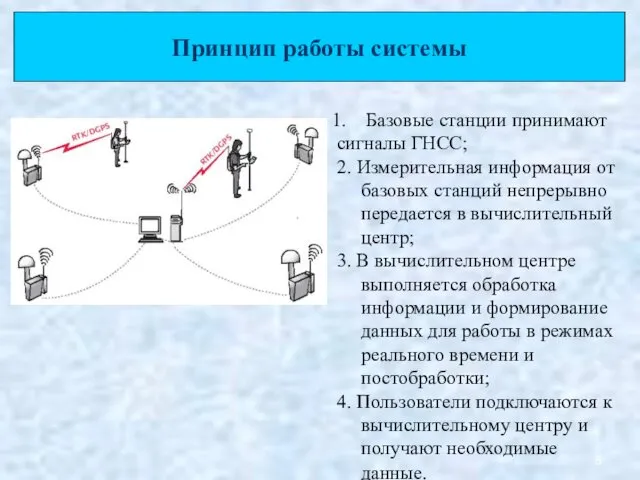
Принцип работы системы
Базовые станции принимают
сигналы ГНСС;
2. Измерительная информация от
Принцип работы системы
Базовые станции принимают
сигналы ГНСС;
2. Измерительная информация от
Основные преимущества системы
- Задание единого координатно-временного пространства
(создание геодезической основы);
-
Основные преимущества системы
- Задание единого координатно-временного пространства
(создание геодезической основы);
-
Две системы координат…
Две полевые бригады…
Отсутствие общей инфраструктуры…
Две системы координат…
Две полевые бригады…
Отсутствие общей инфраструктуры…

Геодезия и маркшейдерия
Кадастровые работы
Строительство
Деформационный мониторинг
Гидрография и портовые операции
Точное земледелие
Управление строительной техникой
Службы
Геодезия и маркшейдерия
Кадастровые работы
Строительство
Деформационный мониторинг
Гидрография и портовые операции
Точное земледелие
Управление строительной техникой
Службы
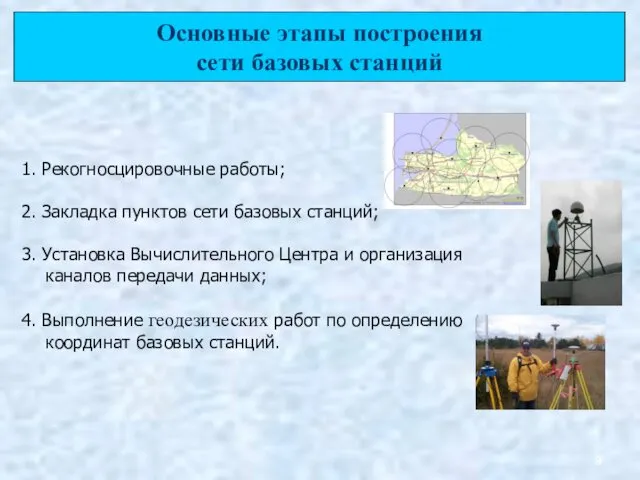
1. Рекогносцировочные работы;
2. Закладка пунктов сети базовых станций;
3. Установка Вычислительного Центра
1. Рекогносцировочные работы;
2. Закладка пунктов сети базовых станций;
3. Установка Вычислительного Центра

Общие требования к установке базовых станций
Открытый небосвод
Общие требования к установке базовых станций
Открытый небосвод
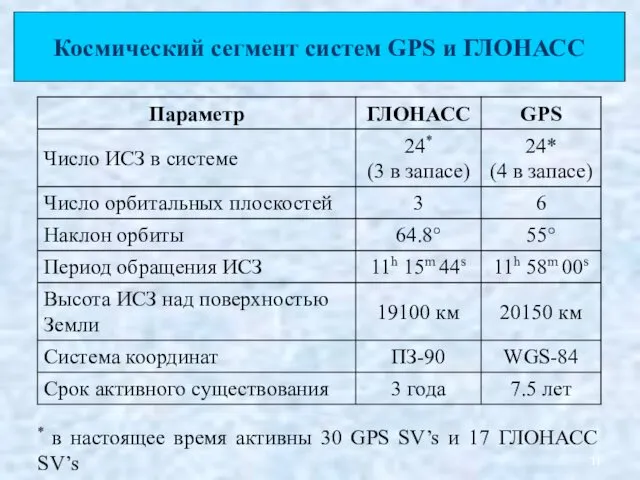
* в настоящее время активны 30 GPS SV’s и 17 ГЛОНАСС
* в настоящее время активны 30 GPS SV’s и 17 ГЛОНАСС
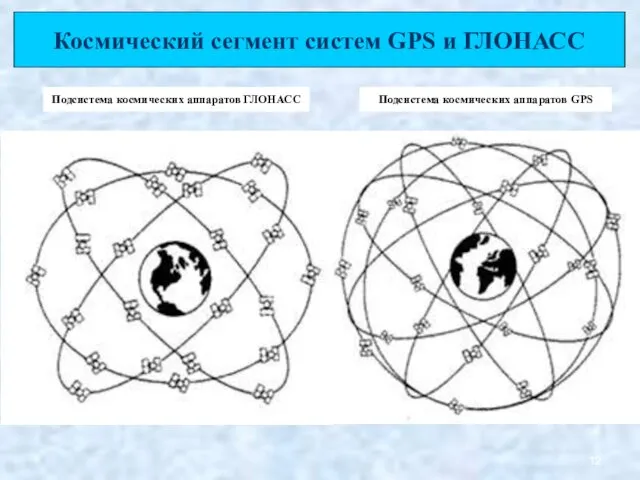
Космический сегмент систем GPS и ГЛОНАСС
Подсистема космических аппаратов ГЛОНАСС
Подсистема космических аппаратов
Космический сегмент систем GPS и ГЛОНАСС
Подсистема космических аппаратов ГЛОНАСС
Подсистема космических аппаратов

Космический сегмент систем GPS и ГЛОНАСС
ГЛОНАСС
спутник
GPS satellite, BLOCK IIA
GPS satellite, BLOCK
Космический сегмент систем GPS и ГЛОНАСС
ГЛОНАСС
спутник
GPS satellite, BLOCK IIA
GPS satellite, BLOCK

Сегмент контроля и управления системой GPS
Колорадо-
Спрингс
о. Гавайи
о. Вознесения
о. Диего-Гарсия
атолл Кваджалейн
Сегмент контроля и управления системой GPS
Колорадо-
Спрингс
о. Гавайи
о. Вознесения
о. Диего-Гарсия
атолл Кваджалейн

Сегмент контроля и управления системой ГЛОНАСС
Сегмент контроля и управления системой ГЛОНАСС
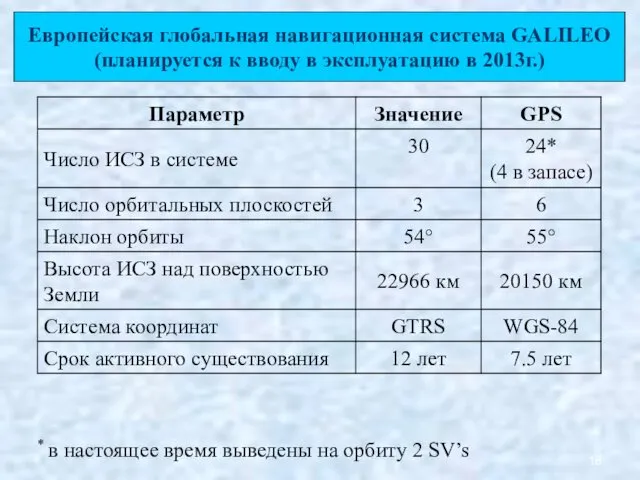
* в настоящее время выведены на орбиту 2 SV’s
Европейская глобальная навигационная
* в настоящее время выведены на орбиту 2 SV’s
Европейская глобальная навигационная
Общий вид спутника системы GALILEO
Общий вид спутника системы GALILEO

Наземный сегмент (сеть IGS)
Наземный сегмент (сеть IGS)


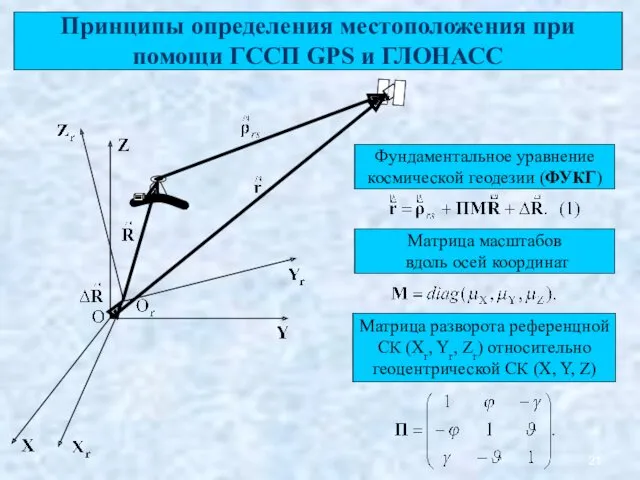
Принципы определения местоположения при помощи ГССП GPS и ГЛОНАСС
Фундаментальное уравнение
Принципы определения местоположения при помощи ГССП GPS и ГЛОНАСС
Фундаментальное уравнение
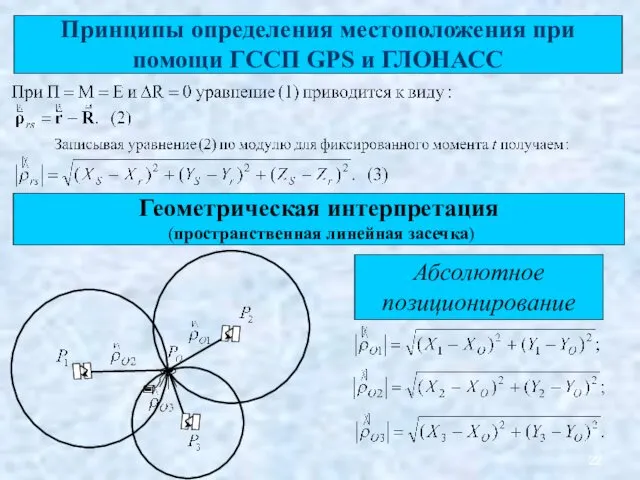
Принципы определения местоположения при помощи ГССП GPS и ГЛОНАСС
Геометрическая интерпретация
Принципы определения местоположения при помощи ГССП GPS и ГЛОНАСС
Геометрическая интерпретация
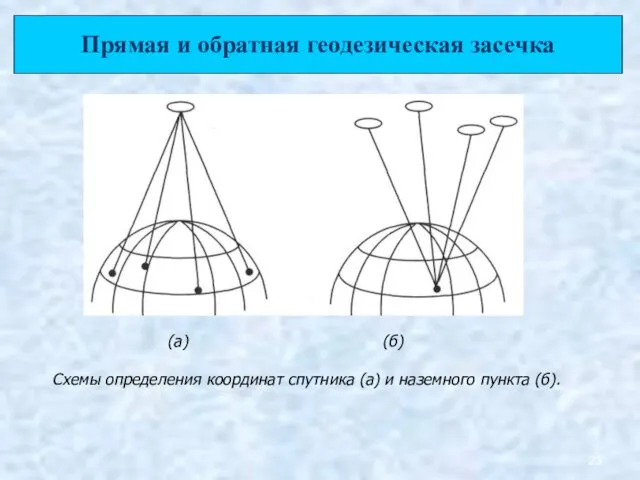
(а) (б)
Схемы определения координат спутника (а) и наземного пункта (б).
Прямая
(а) (б)
Схемы определения координат спутника (а) и наземного пункта (б).
Прямая
Север
Восток
Верх
X
Y
Z
Трансформация координат
Относительное позиционирование
Север
Восток
Верх
X
Y
Z
Трансформация координат
Относительное позиционирование
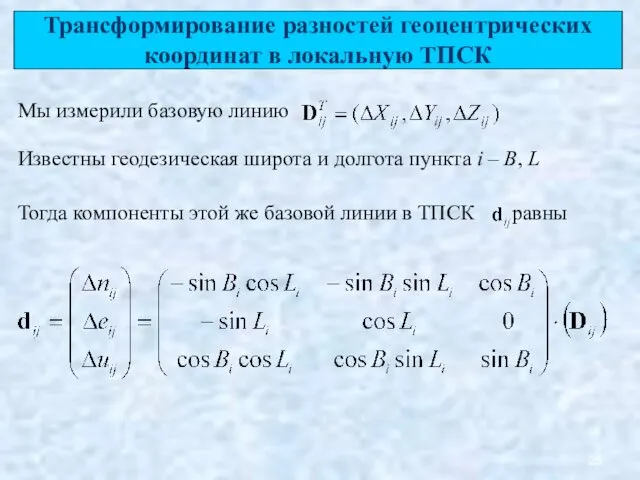
Мы измерили базовую линию
Трансформирование разностей геоцентрических координат в локальную ТПСК
Мы измерили базовую линию
Трансформирование разностей геоцентрических координат в локальную ТПСК
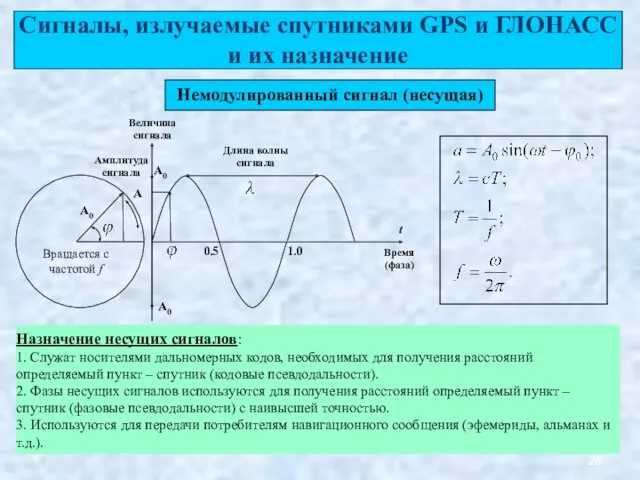
Сигналы, излучаемые спутниками GPS и ГЛОНАСС и их назначение
Немодулированный сигнал
Сигналы, излучаемые спутниками GPS и ГЛОНАСС и их назначение
Немодулированный сигнал
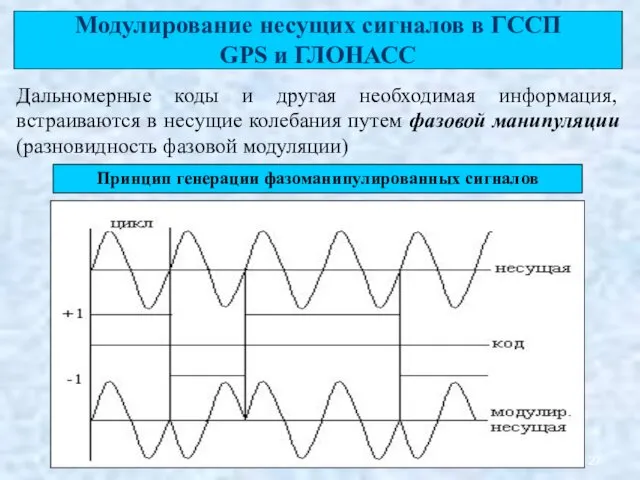
Модулирование несущих сигналов в ГССП
GPS и ГЛОНАСС
Дальномерные коды и
Модулирование несущих сигналов в ГССП
GPS и ГЛОНАСС
Дальномерные коды и
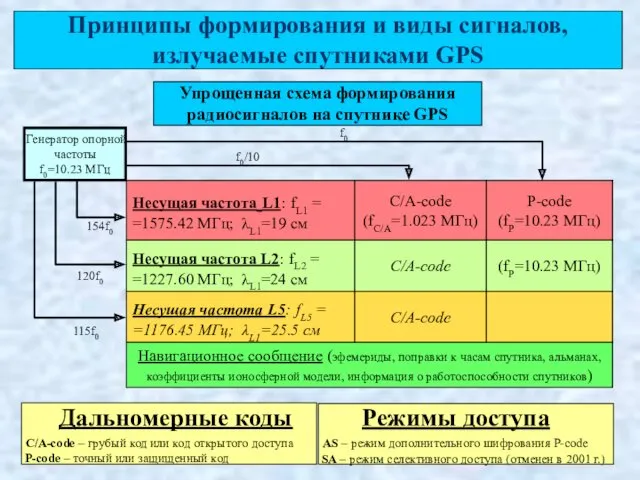
Генератор опорной частоты
f0=10.23 МГц
f0/10
Принципы формирования и виды сигналов,
излучаемые спутниками GPS
f0
Генератор опорной частоты
f0=10.23 МГц
f0/10
Принципы формирования и виды сигналов,
излучаемые спутниками GPS
f0
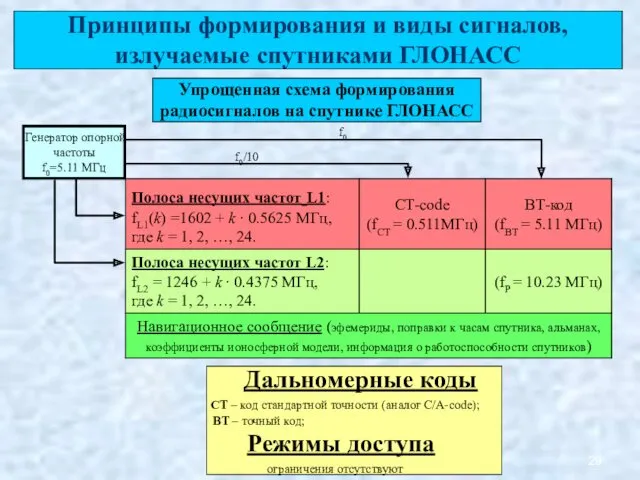
Генератор опорной частоты
f0=5.11 МГц
f0/10
Принципы формирования и виды сигналов,
излучаемые спутниками ГЛОНАСС
f0
Генератор опорной частоты
f0=5.11 МГц
f0/10
Принципы формирования и виды сигналов,
излучаемые спутниками ГЛОНАСС
f0
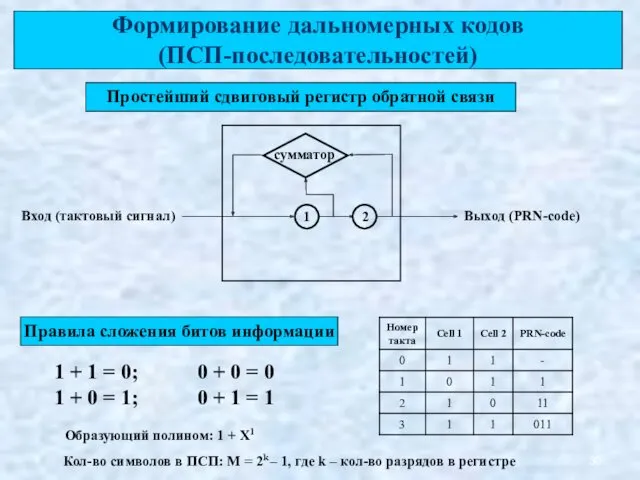
Формирование дальномерных кодов
(ПСП-последовательностей)
Простейший сдвиговый регистр обратной связи
Вход (тактовый сигнал)
Выход (PRN-code)
Правила
Формирование дальномерных кодов
(ПСП-последовательностей)
Простейший сдвиговый регистр обратной связи
Вход (тактовый сигнал)
Выход (PRN-code)
Правила
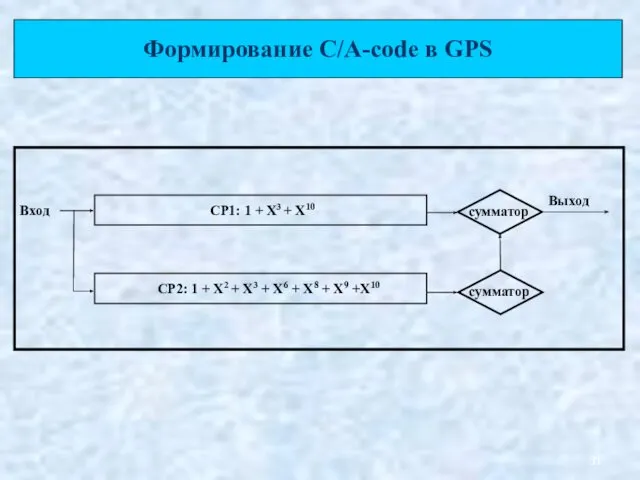
Формирование C/A-code в GPS
Формирование C/A-code в GPS
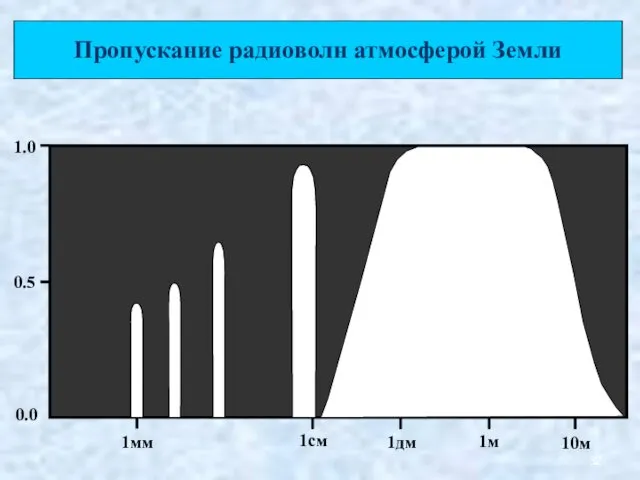
Пропускание радиоволн атмосферой Земли
Пропускание радиоволн атмосферой Земли

Системное время GPS и ГЛОНАСС не совпадает с международными шкалами времени
Системное время GPS и ГЛОНАСС не совпадает с международными шкалами времени
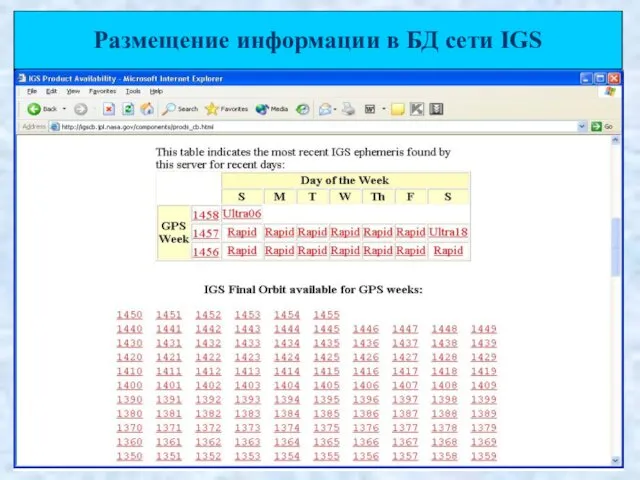
Размещение информации в БД сети IGS
Размещение информации в БД сети IGS
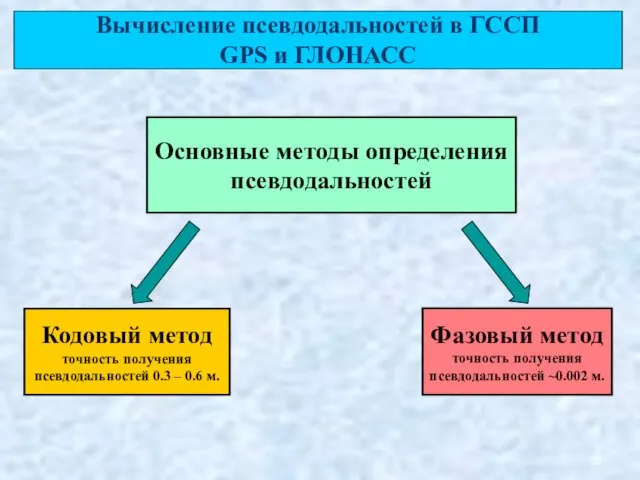
Основные методы определения псевдодальностей
Кодовый метод точность получения псевдодальностей 0.3 – 0.6
Основные методы определения псевдодальностей
Кодовый метод точность получения псевдодальностей 0.3 – 0.6
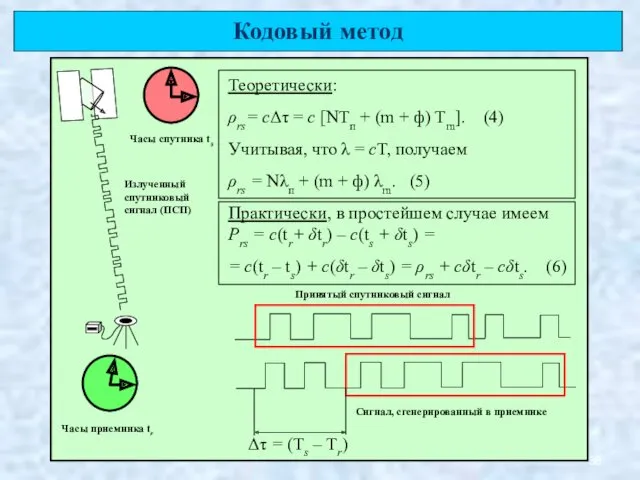
Излученный спутниковый сигнал (ПСП)
Принятый спутниковый сигнал
Сигнал, сгенерированный в приемнике
Часы приемника tr
Часы
Излученный спутниковый сигнал (ПСП)
Принятый спутниковый сигнал
Сигнал, сгенерированный в приемнике
Часы приемника tr
Часы
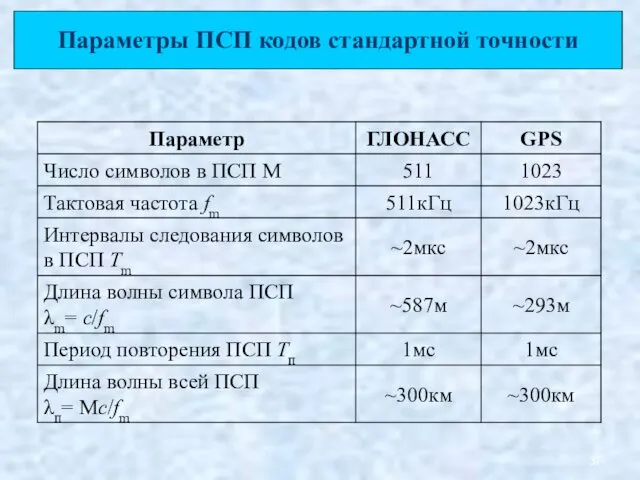
Параметры ПСП кодов стандартной точности
Параметры ПСП кодов стандартной точности
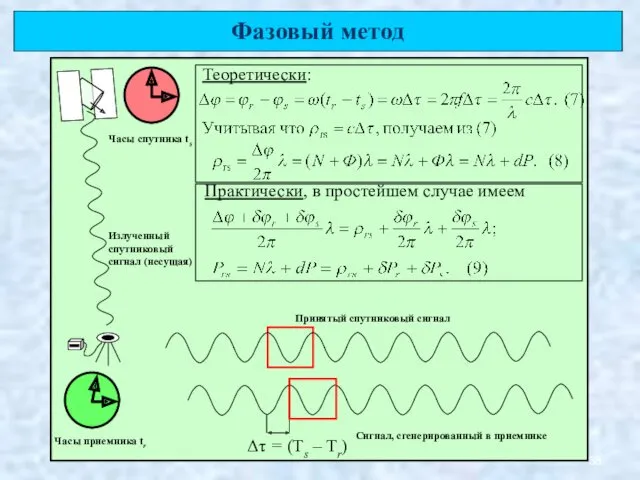
Излученный спутниковый сигнал (несущая)
Принятый спутниковый сигнал
Сигнал, сгенерированный в приемнике
Часы приемника tr
Часы
Излученный спутниковый сигнал (несущая)
Принятый спутниковый сигнал
Сигнал, сгенерированный в приемнике
Часы приемника tr
Часы
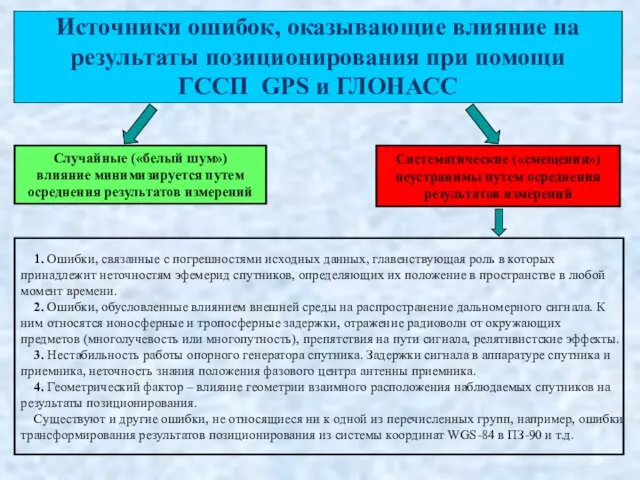
Случайные («белый шум»)
влияние минимизируется путем осреднения результатов измерений
Систематические («смещения»)
неустранимы путем
Случайные («белый шум»)
влияние минимизируется путем осреднения результатов измерений
Систематические («смещения») неустранимы путем
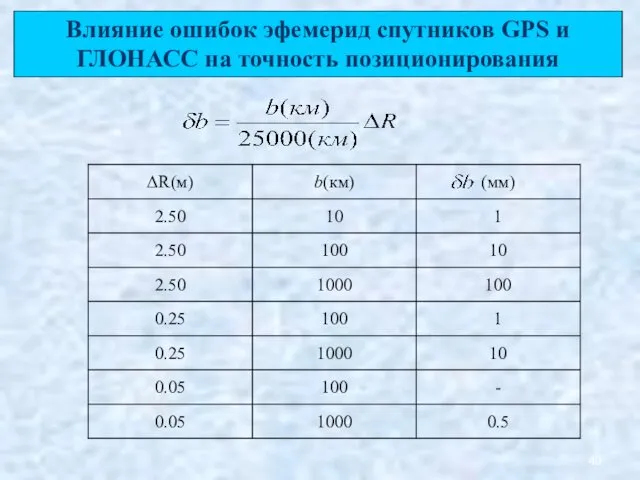
Влияние ошибок эфемерид спутников GPS и ГЛОНАСС на точность позиционирования
Влияние ошибок эфемерид спутников GPS и ГЛОНАСС на точность позиционирования

50 – 1000 км
0 – 50 км
Ионосфера
Тропосфера
Атмосферная рефракция
Земля
50 – 1000 км
0 – 50 км
Ионосфера
Тропосфера
Атмосферная рефракция
Земля
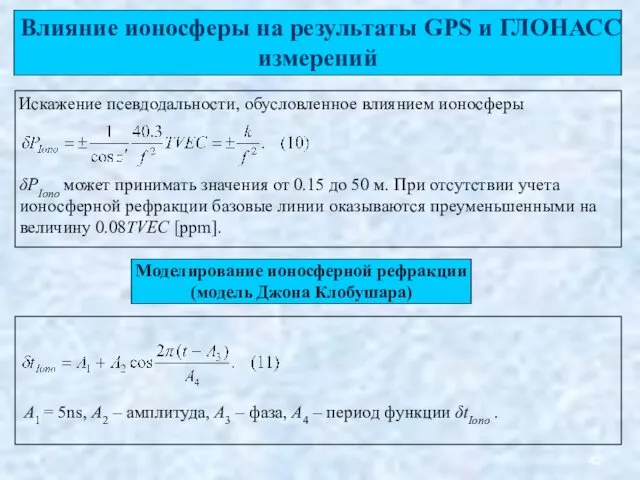
Влияние ионосферы на результаты GPS и ГЛОНАСС измерений
Искажение псевдодальности, обусловленное влиянием
Влияние ионосферы на результаты GPS и ГЛОНАСС измерений
Искажение псевдодальности, обусловленное влиянием
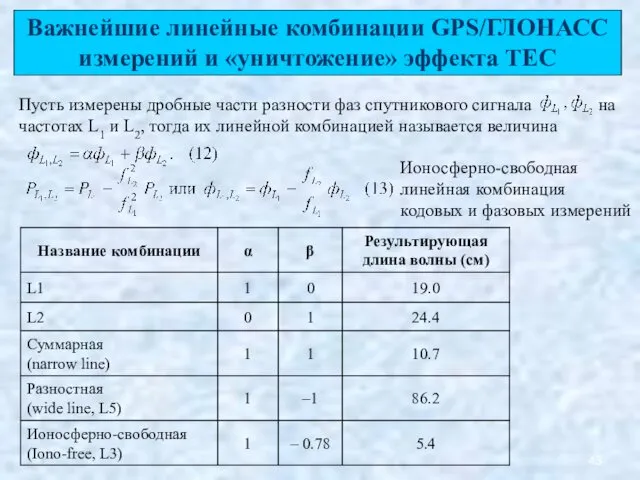
Важнейшие линейные комбинации GPS/ГЛОНАСС измерений и «уничтожение» эффекта TEC
Пусть измерены дробные
Важнейшие линейные комбинации GPS/ГЛОНАСС измерений и «уничтожение» эффекта TEC
Пусть измерены дробные
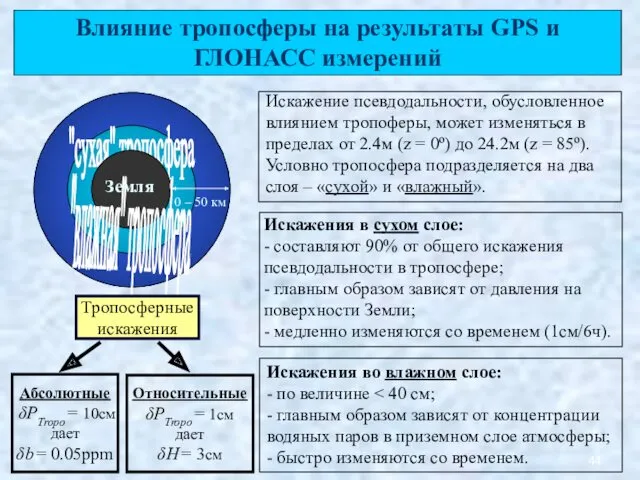
Влияние тропосферы на результаты GPS и ГЛОНАСС измерений
Искажения во влажном слое:
-
Влияние тропосферы на результаты GPS и ГЛОНАСС измерений
Искажения во влажном слое: -
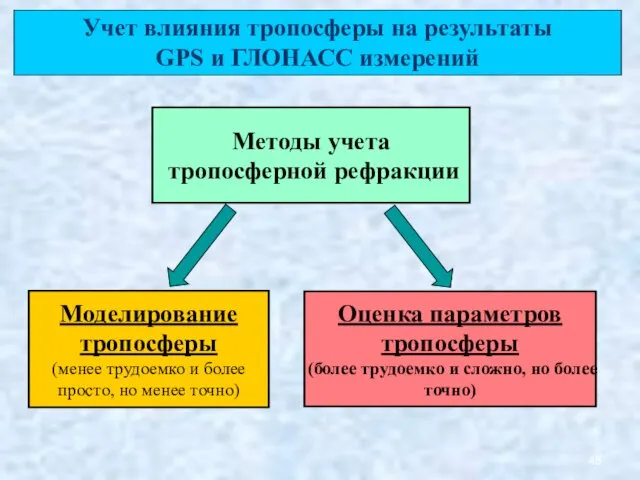
Учет влияния тропосферы на результаты
GPS и ГЛОНАСС измерений
Моделирование
тропосферы
(менее трудоемко и
Учет влияния тропосферы на результаты
GPS и ГЛОНАСС измерений
Моделирование тропосферы (менее трудоемко и
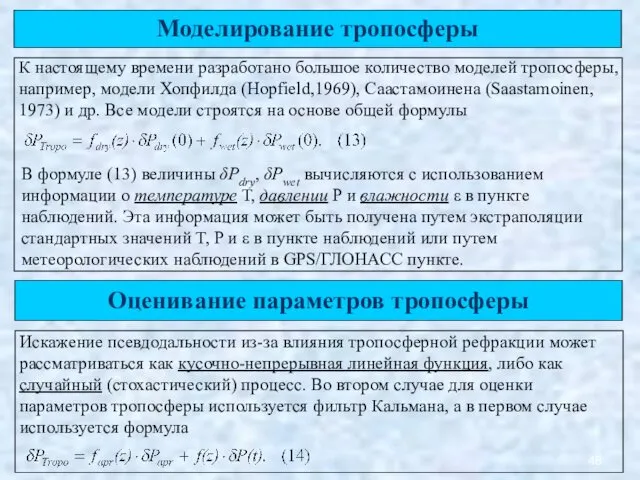
Моделирование тропосферы
К настоящему времени разработано большое количество моделей тропосферы, например,
Моделирование тропосферы
К настоящему времени разработано большое количество моделей тропосферы, например,
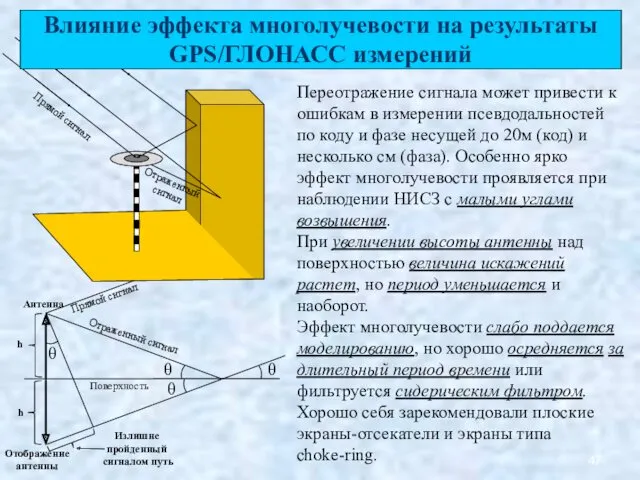
Антенна
Поверхность
Отраженный сигнал
Прямой сигнал
h
h
Отображение антенны
Излишне пройденный сигналом путь
Влияние эффекта многолучевости на результаты
Антенна
Поверхность
Отраженный сигнал
Прямой сигнал
h
h
Отображение антенны
Излишне пройденный сигналом путь
Влияние эффекта многолучевости на результаты
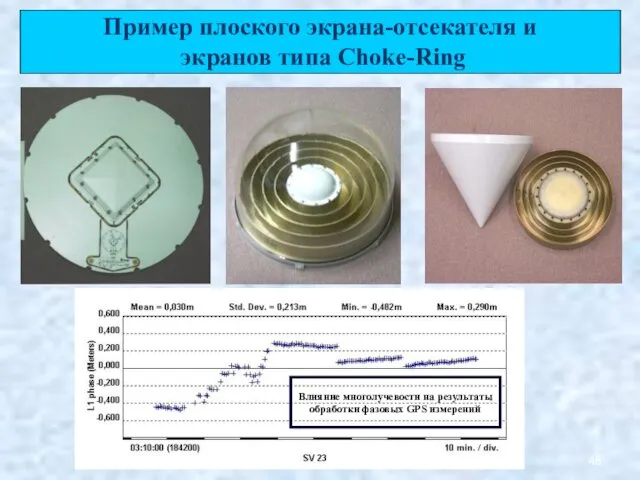
Пример плоского экрана-отсекателя и
экранов типа Choke-Ring
Влияние многолучевости на результаты
Пример плоского экрана-отсекателя и
экранов типа Choke-Ring
Влияние многолучевости на результаты
H
h
D
θ
Препятствия на пути спутникового сигнала
Примечание: таблица составлена для h =
H
h
D
θ
Препятствия на пути спутникового сигнала
Примечание: таблица составлена для h =
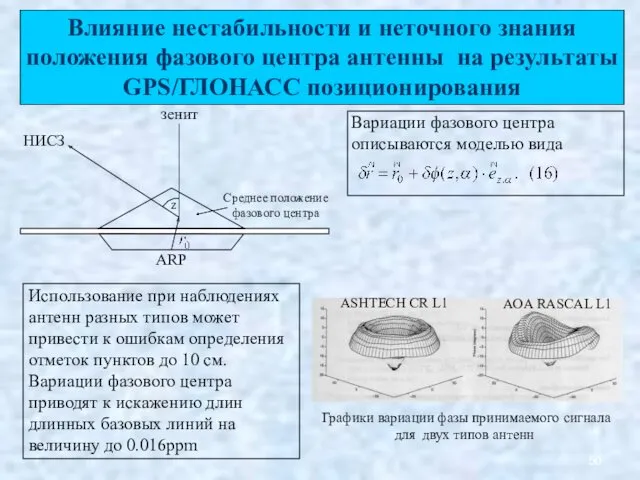
Влияние нестабильности и неточного знания положения фазового центра антенны на результаты
Влияние нестабильности и неточного знания положения фазового центра антенны на результаты
Калибровка GPS/ГЛОНАСС
Калибровка GPS/ГЛОНАСС
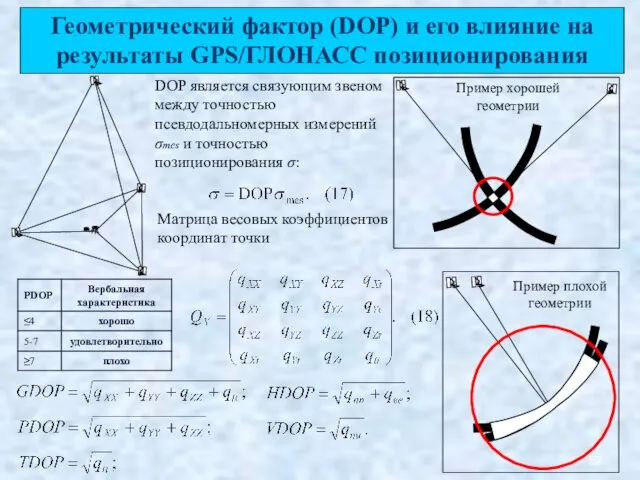
Геометрический фактор (DOP) и его влияние на результаты GPS/ГЛОНАСС позиционирования
DOP является
Геометрический фактор (DOP) и его влияние на результаты GPS/ГЛОНАСС позиционирования
DOP является
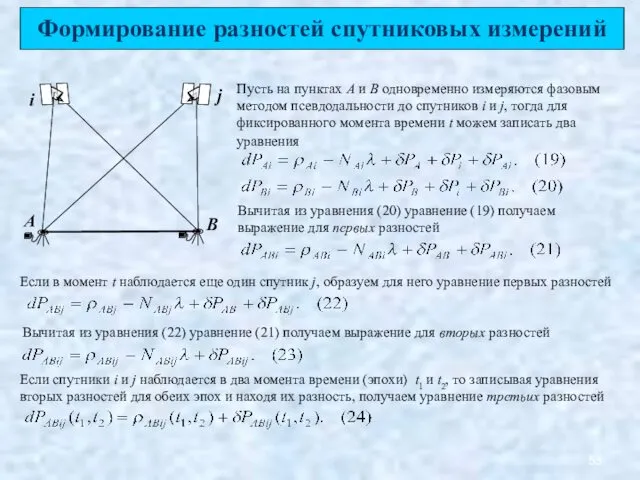
Формирование разностей спутниковых измерений
A
B
i
j
Пусть на пунктах А и В одновременно измеряются
Формирование разностей спутниковых измерений
A
B
i
j
Пусть на пунктах А и В одновременно измеряются

Способы и режимы позиционирования
Способы и режимы позиционирования
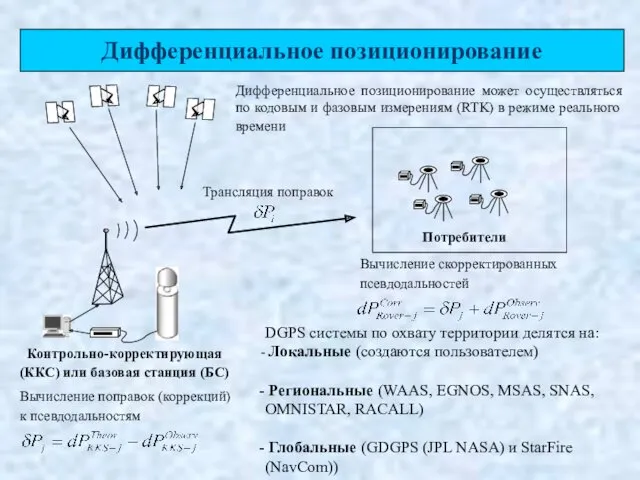
Контрольно-корректирующая (ККС) или базовая станция (БС)
Потребители
Вычисление поправок (коррекций) к
Контрольно-корректирующая (ККС) или базовая станция (БС)
Потребители
Вычисление поправок (коррекций) к
Способы инициализации кинематики
Цель инициализации – разрешение неоднозначности фазовых измерений.
1). По известной
Способы инициализации кинематики
Цель инициализации – разрешение неоднозначности фазовых измерений. 1). По известной
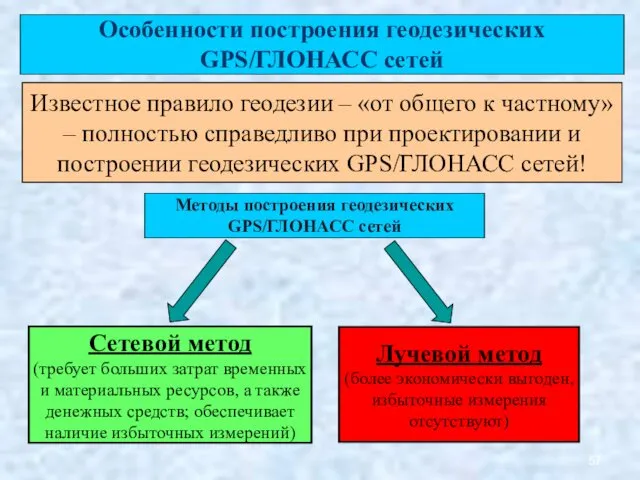
Особенности построения геодезических GPS/ГЛОНАСС сетей
Известное правило геодезии – «от общего
Особенности построения геодезических GPS/ГЛОНАСС сетей
Известное правило геодезии – «от общего
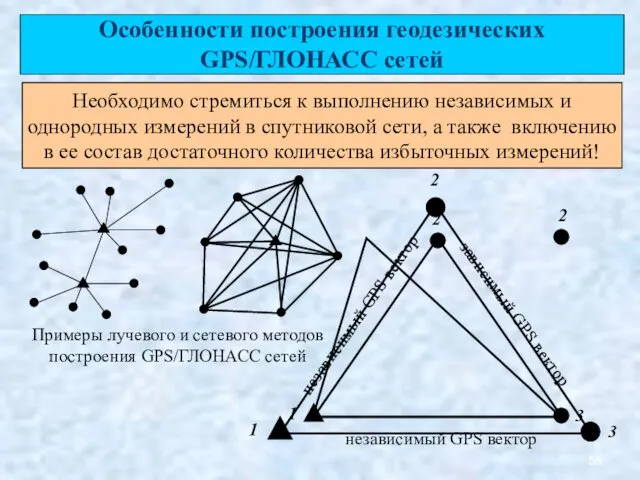
Особенности построения геодезических GPS/ГЛОНАСС сетей
Необходимо стремиться к выполнению независимых и
Особенности построения геодезических GPS/ГЛОНАСС сетей
Необходимо стремиться к выполнению независимых и
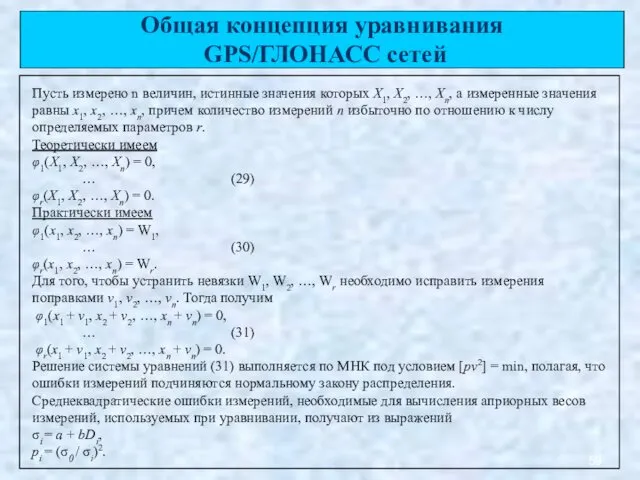
Общая концепция уравнивания
GPS/ГЛОНАСС сетей
Пусть измерено n величин, истинные значения
Общая концепция уравнивания
GPS/ГЛОНАСС сетей
Пусть измерено n величин, истинные значения
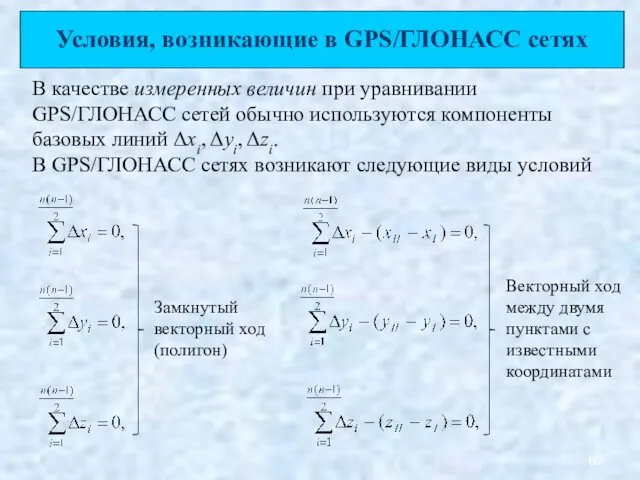
Условия, возникающие в GPS/ГЛОНАСС сетях
В качестве измеренных величин при уравнивании GPS/ГЛОНАСС
Условия, возникающие в GPS/ГЛОНАСС сетях
В качестве измеренных величин при уравнивании GPS/ГЛОНАСС
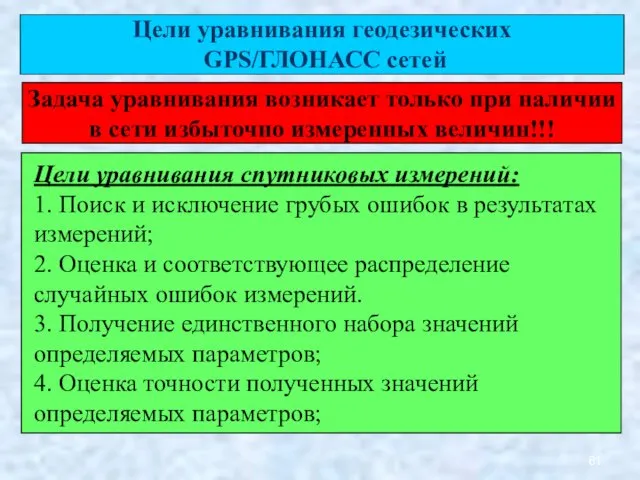
Цели уравнивания геодезических
GPS/ГЛОНАСС сетей
Задача уравнивания возникает только при наличии
Цели уравнивания геодезических
GPS/ГЛОНАСС сетей
Задача уравнивания возникает только при наличии
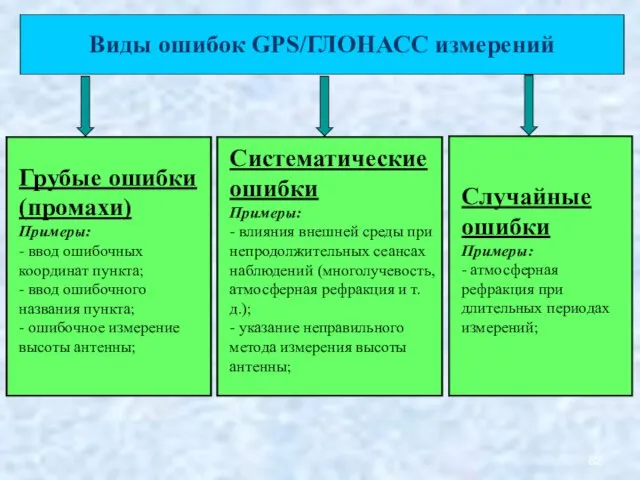
Виды ошибок GPS/ГЛОНАСС измерений
Грубые ошибки (промахи)
Примеры:
- ввод ошибочных координат пункта;
-
Виды ошибок GPS/ГЛОНАСС измерений
Грубые ошибки (промахи) Примеры: - ввод ошибочных координат пункта; -

Абсолютная точность и внутренняя сходимость результатов GPS/ГЛОНАСС измерений
Абсолютная точность (accuracy)
Абсолютная точность и внутренняя сходимость результатов GPS/ГЛОНАСС измерений
Абсолютная точность (accuracy)
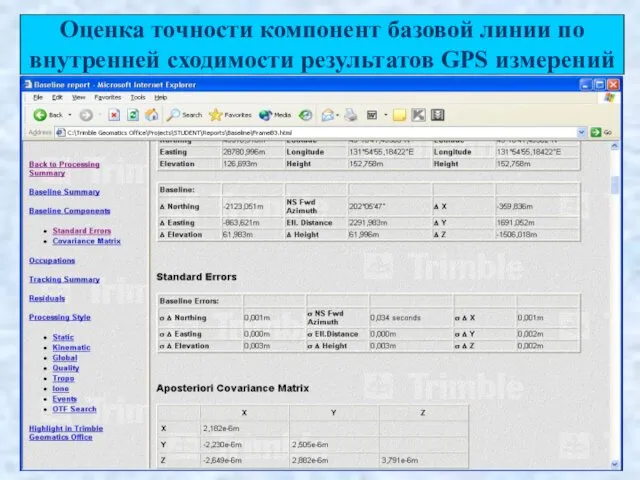
Оценка точности компонент базовой линии по внутренней сходимости результатов GPS измерений
Оценка точности компонент базовой линии по внутренней сходимости результатов GPS измерений
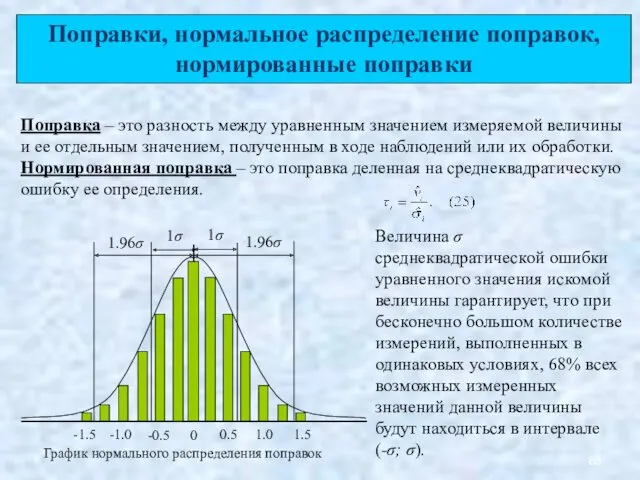
Поправки, нормальное распределение поправок, нормированные поправки
Поправка – это разность между уравненным
Поправки, нормальное распределение поправок, нормированные поправки
Поправка – это разность между уравненным
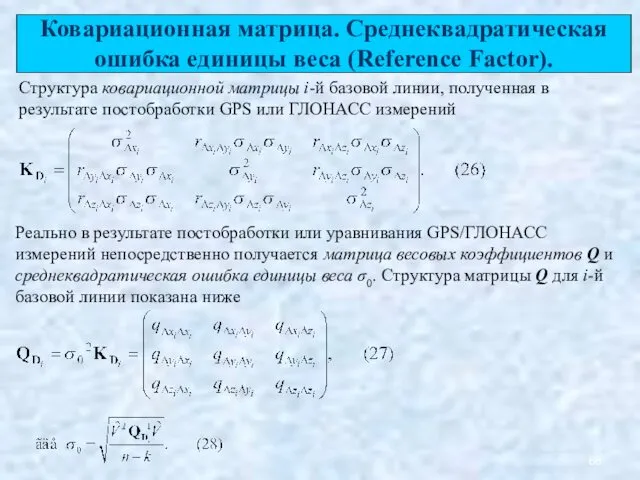
Ковариационная матрица. Среднеквадратическая ошибка единицы веса (Reference Factor).
Структура ковариационной матрицы
Ковариационная матрица. Среднеквадратическая ошибка единицы веса (Reference Factor).
Структура ковариационной матрицы
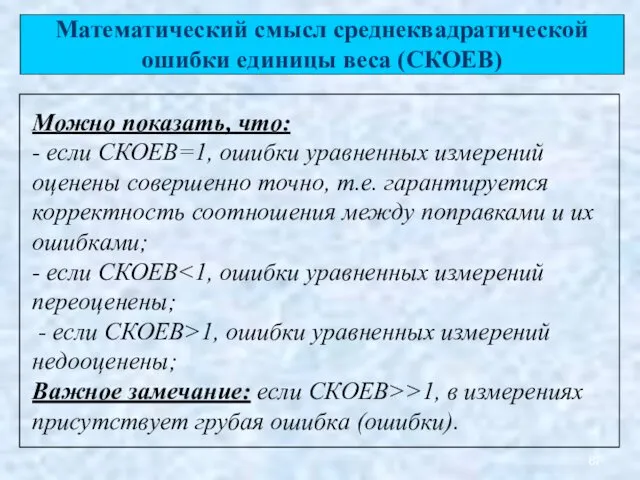
Математический смысл среднеквадратической ошибки единицы веса (СКОЕВ)
Можно показать, что:
- если
Математический смысл среднеквадратической ошибки единицы веса (СКОЕВ)
Можно показать, что: - если
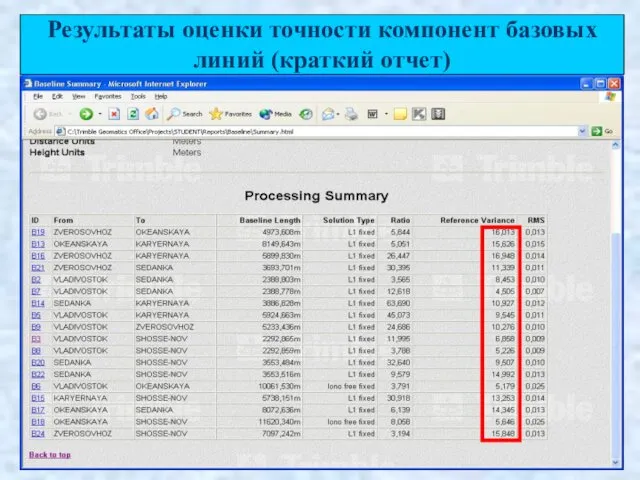
Результаты оценки точности компонент базовых линий (краткий отчет)
Результаты оценки точности компонент базовых линий (краткий отчет)
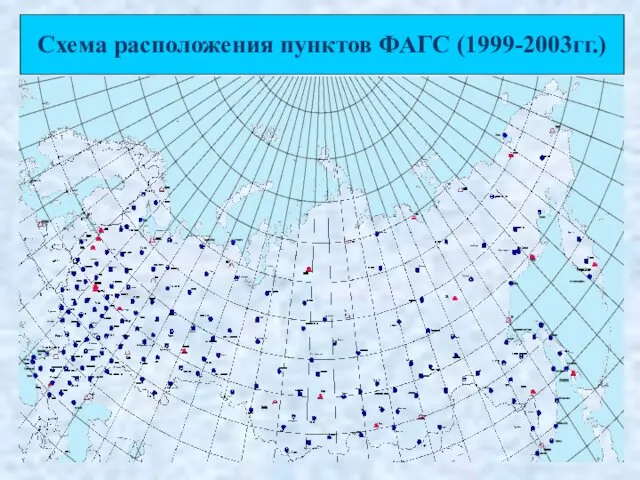
Схема расположения пунктов ФАГС (1999-2003гг.)
Схема расположения пунктов ФАГС (1999-2003гг.)

Схема расположения пунктов ФАГС (1999-2003гг.)
Схема расположения пунктов ФАГС (1999-2003гг.)

Схема расположения пунктов ОГС
Схема расположения пунктов ОГС
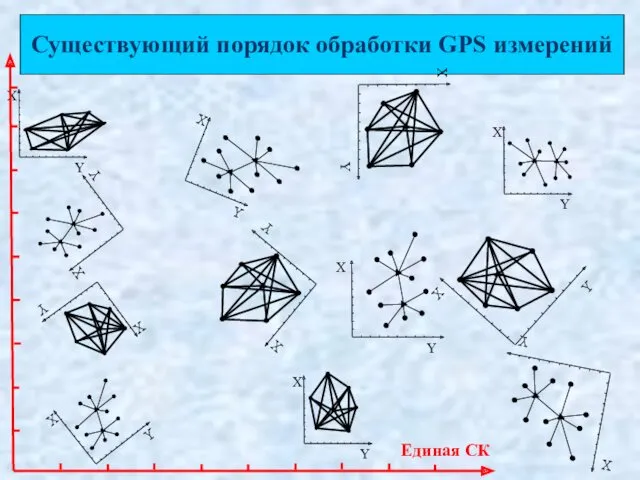
Существующий порядок обработки GPS измерений
Единая СК
Существующий порядок обработки GPS измерений
Единая СК
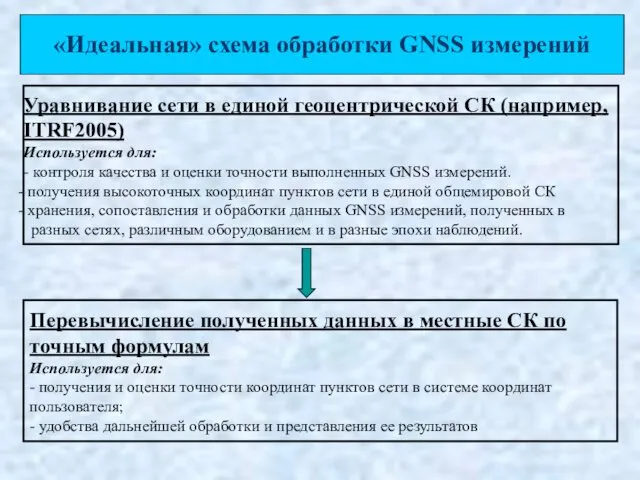
«Идеальная» схема обработки GNSS измерений
Уравнивание сети в единой геоцентрической СК (например,
«Идеальная» схема обработки GNSS измерений
Уравнивание сети в единой геоцентрической СК (например,
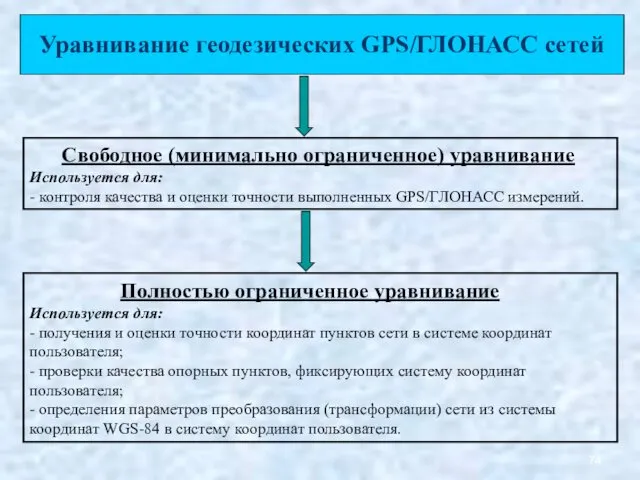
Уравнивание геодезических GPS/ГЛОНАСС сетей
Свободное (минимально ограниченное) уравнивание
Используется для:
- контроля
Уравнивание геодезических GPS/ГЛОНАСС сетей
Свободное (минимально ограниченное) уравнивание Используется для: - контроля
Трансформация результатов GPS/ГЛОНАСС измерений в заданную систему координат
Цель трансформации –
Трансформация результатов GPS/ГЛОНАСС измерений в заданную систему координат
Цель трансформации –
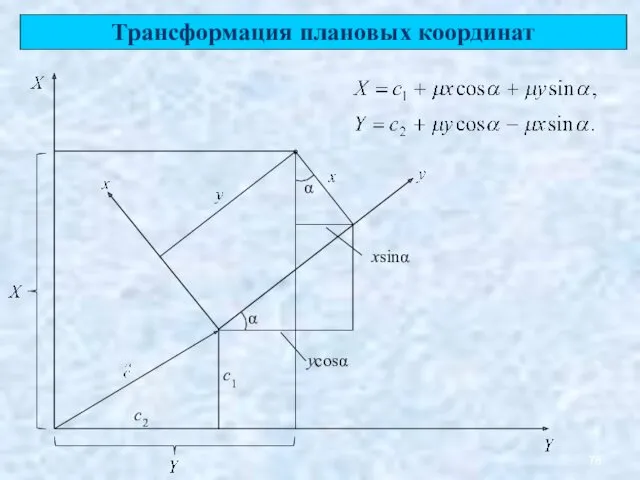
Трансформация плановых координат
α
α
ycosα
xsinα
c2
c1
Трансформация плановых координат
α
α
ycosα
xsinα
c2
c1
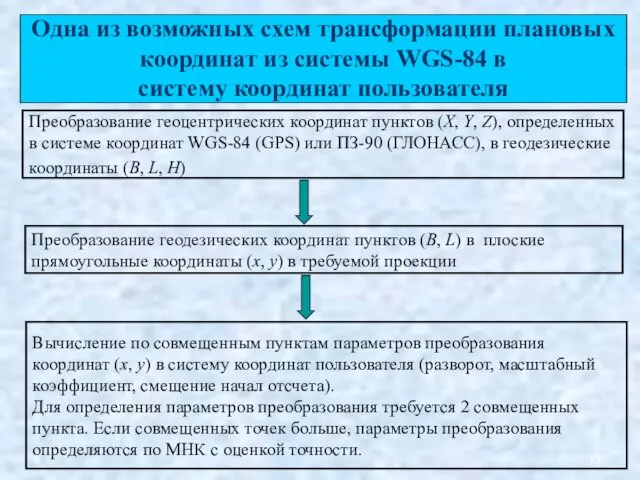
Одна из возможных схем трансформации плановых координат из системы WGS-84 в
Одна из возможных схем трансформации плановых координат из системы WGS-84 в
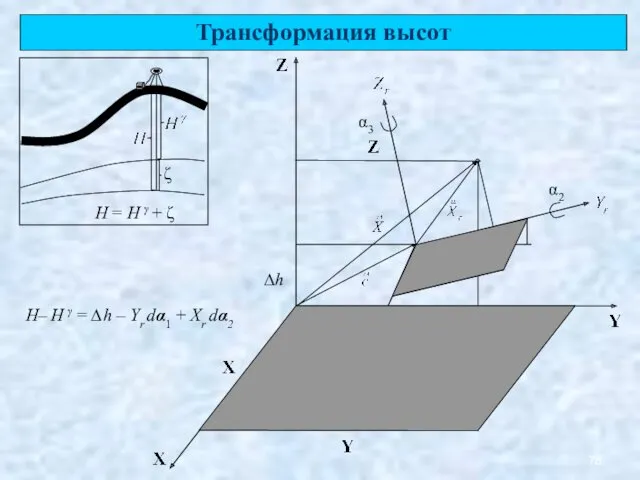
Трансформация высот
ζ
H = H γ + ζ
α1
α2
α3
∆h
H– H γ =
Трансформация высот
ζ
H = H γ + ζ
α1
α2
α3
∆h
H– H γ =
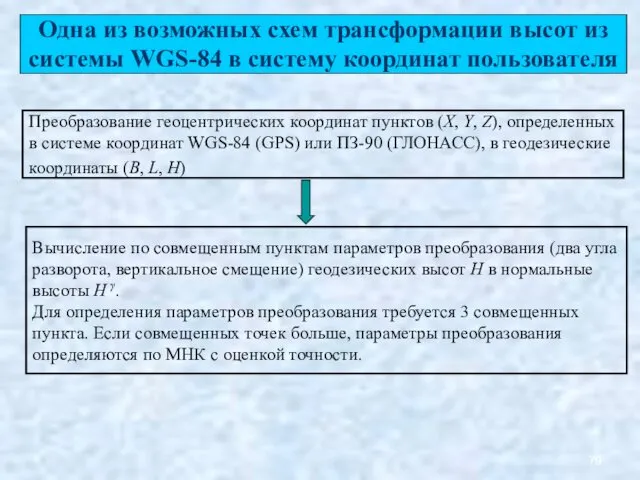
Одна из возможных схем трансформации высот из системы WGS-84 в систему
Одна из возможных схем трансформации высот из системы WGS-84 в систему

Упрощенная принципиальная схема устройства и функционирования спутникового приемника
Антенный блок
Блок питания
Радиочастотный блок
___________________________
Блок
Упрощенная принципиальная схема устройства и функционирования спутникового приемника
Антенный блок
Блок питания
Радиочастотный блок ___________________________ Блок
Классификация спутникового оборудования
Системная классификация.
1) Односистемные (обычно ориентированы на GPS);
2) Двухсистемные
Классификация спутникового оборудования
Системная классификация. 1) Односистемные (обычно ориентированы на GPS); 2) Двухсистемные
ПРАКТИЧЕСКАЯ ЧАСТЬ
Общие рекомендации по выполнению геодезических GPS/ГЛОНАСС измерений
При практическом выполнении
ПРАКТИЧЕСКАЯ ЧАСТЬ
Общие рекомендации по выполнению геодезических GPS/ГЛОНАСС измерений
При практическом выполнении
Параметры, которые необходимо контролировать при выполнении GPS/ГЛОНАСС измерений
1) Количество непрерывно отслеживаемых
Параметры, которые необходимо контролировать при выполнении GPS/ГЛОНАСС измерений
1) Количество непрерывно отслеживаемых
 Мастер -класс Божья коровка в технике канзаши Диск
Мастер -класс Божья коровка в технике канзаши Диск Правовое обеспечение местного самоуправления. Часть 2
Правовое обеспечение местного самоуправления. Часть 2 Презентация к логопедическому занятию в подготовительной группе по теме Ранняя весна.
Презентация к логопедическому занятию в подготовительной группе по теме Ранняя весна. a6e9bd53623e7a70f46310600f3
a6e9bd53623e7a70f46310600f3 Художественно – эстетическое развитие в МБДОУ, компенрсирующего вида №3 Ручеёк.
Художественно – эстетическое развитие в МБДОУ, компенрсирующего вида №3 Ручеёк. Основные модели развития науки и их критический анализ: кумулятивизм и антикумулятивизм, прогрессивизм и антипрогрессивизм
Основные модели развития науки и их критический анализ: кумулятивизм и антикумулятивизм, прогрессивизм и антипрогрессивизм Вирусные болезни схж - крс, мрс
Вирусные болезни схж - крс, мрс Организация предметно-пространственной среды для театрализованной деятельности
Организация предметно-пространственной среды для театрализованной деятельности Мини-проект Предприятия нашего города ОАО Невская косметика
Мини-проект Предприятия нашего города ОАО Невская косметика Switching systems
Switching systems Развитие артикуляционной моторики. Информация для родителей от учителя-логопеда.
Развитие артикуляционной моторики. Информация для родителей от учителя-логопеда. Работа с родителями в ДОУ (презентация)
Работа с родителями в ДОУ (презентация) GalaxyS7 Edge Repair Tips Troubleshooting Guide (by Part)
GalaxyS7 Edge Repair Tips Troubleshooting Guide (by Part) Классный час. Правила дорожного движения
Классный час. Правила дорожного движения Преемственность в обучении начальной школы и среднего звена
Преемственность в обучении начальной школы и среднего звена Биологическое оружие и его виды
Биологическое оружие и его виды Графика: прошлое и настоящее
Графика: прошлое и настоящее Жизненные цели подростка
Жизненные цели подростка Презентация к уроку с Марусей
Презентация к уроку с Марусей Методические рекомендации по оформлению научных работ
Методические рекомендации по оформлению научных работ Antihypertensive and lipid-lowering drugs
Antihypertensive and lipid-lowering drugs Природные комплексы Русской равнины. Презентация ученицы 8 класса МОУ Весеннинская ООШ Василевич Елены
Природные комплексы Русской равнины. Презентация ученицы 8 класса МОУ Весеннинская ООШ Василевич Елены Групповая работа. Команды по 4 ученика
Групповая работа. Команды по 4 ученика Урок хими 9 класс Реакции ионного обмена
Урок хими 9 класс Реакции ионного обмена Методы исследования в биологии
Методы исследования в биологии Консультация для педагогов Влияние музыки на психику человека
Консультация для педагогов Влияние музыки на психику человека Технология подключения, настройки и проверки работоспособности печатающих устройств
Технология подключения, настройки и проверки работоспособности печатающих устройств Инновационные технологии производства рыбных товаров
Инновационные технологии производства рыбных товаров