- Гибкий производственный модуль (ГПМ)

Содержание
- 2. Гибкий производственный модуль (ГПМ) — единица технологического оборудования, оснащенная устройствами для автоматической смены инструмента и заготовок,
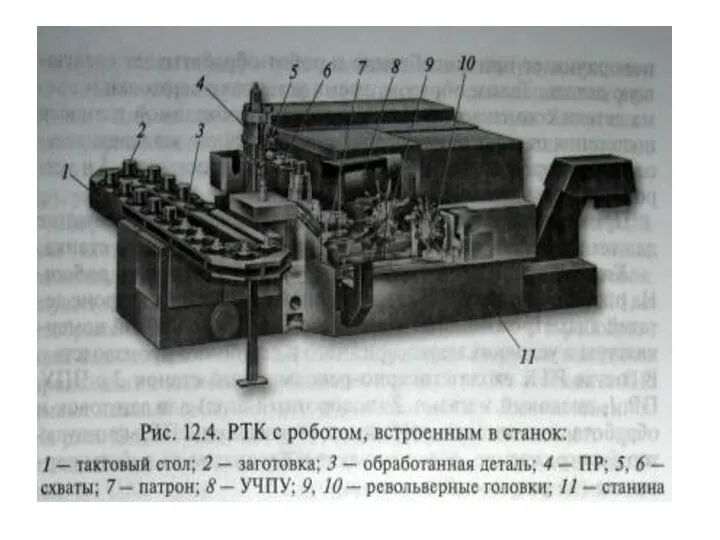
- 3. РТК – это автономно действующая автоматическая станочная система, включающая одну и более единиц технологического оборудования и
- 4. Промышленный робот —автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения
- 5. ПОДВЕСНЫЕ РОБОТЫ
- 6. НАПОЛЬНЫЕ РОБОТЫ
- 7. ПРОМЫШЛЕННЫЙ РОБОТ М20Ц 1 – монорельс, 2,3 – руки, 4 – каретка
- 8. ПР Мостового типа
- 9. РОБОТЫ, ВСТРАИВАЕМЫЕ В СТАНКИ Координаты перемещения захвата робота мод М10П62.01: а – движение руки вперед и
- 10. Погрузка, загрузка разгрузка промышленными роботами Fanuc и KUKA
- 12. Роботы промышленные серии АМ применяются в автоматизации и механизации производств: штамповка, сборка, мехобработка и др.
- 13. прoмышленный рoбoт KUKA Robotics предназначен для вырезки oтверcтий (пoд oтветвления трoйникoв) в загoтoвках тoлщинoй дo 100
- 15. промышленные роботы автоматизируют: установку заготовок в рабочую зону станка , контроль правильности их базирования; снятие готовых
- 16. Тактовый стол- загрузочное устройство с шаговым перемещением, на котором устанавливается запас заготовок. Тактовый стол подает заготовку
- 17. приспособление-спутник- вместе с закрепленной на нем заготовкой последовательно перемещается по всей трассе линии с помощью шагового
- 18. Дисковый магазин предназначен для хранения заготовок и обработанных деталей в стопах и выдачи их на позиции
- 19. Поворотные столы выполняют в виде круглых или кольцевых планшайб, реже — в виде узлов с прямолинейным
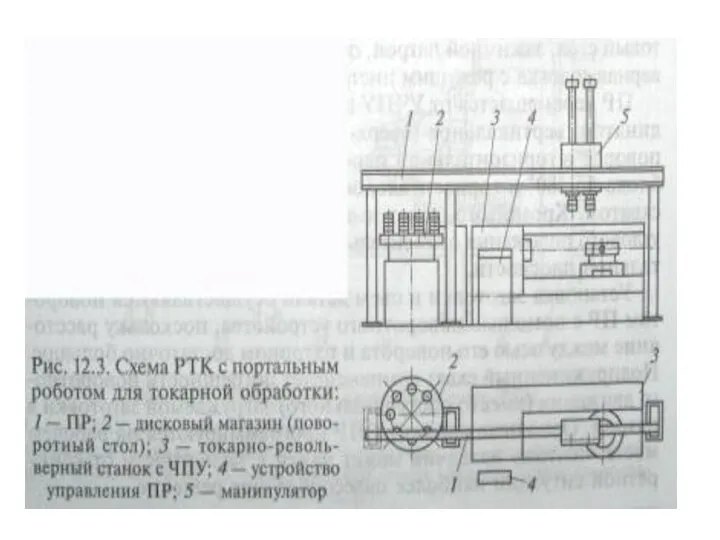
- 20. Виды компоновок РТК: однопозиционный РТК, состоящий из одного станка, обслуживаемого одним ПР (напольным, портальным или встроенным
- 21. РТК для фрезерной обработки 1-Фрезерный станок с ЧПУ1 2-Фрезерный станок с ЧПУ 2 3 -Промышленный робот
- 22. Конструкция промышленного робота: 1 - датчик обратной связи; 2 — захватное устройство; 3 — кисть; 4
- 23. Структурная схема манипулятора
- 24. Однопозиционный РТК на базе токарного станка с ЧПУ мод. 16К20Ф3 и промышленного робота М20П40.01: 1 –
- 25. РТК для токарной обработки мод. КС10.48 1 – токарно-револьверный станок мод. 1В340Ф30; 2 – ПР мод.
- 28. Роботизированный комплекс мод РСК 02 предназначен для автоматизации технологического процесса групповой сборки узлов электроаппаратов, состоящих из
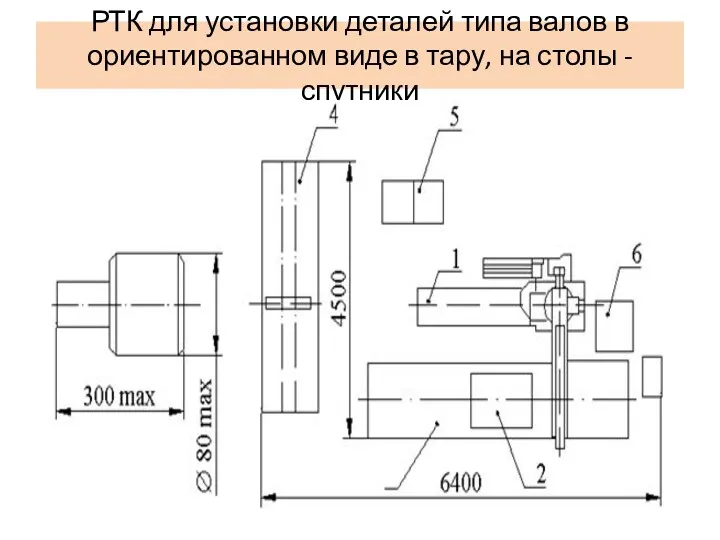
- 29. РТК для установки деталей типа валов в ориентированном виде в тару, на столы - спутники
- 30. Автоматизированный участок СМ-РСД.01 для обработки деталей типа тел вращения:
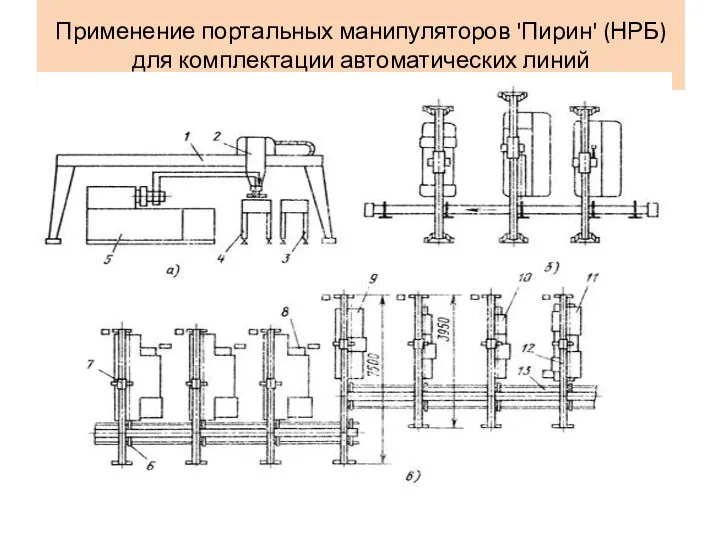
- 31. Применение портальных манипуляторов 'Пирин' (НРБ) для комплектации автоматических линий
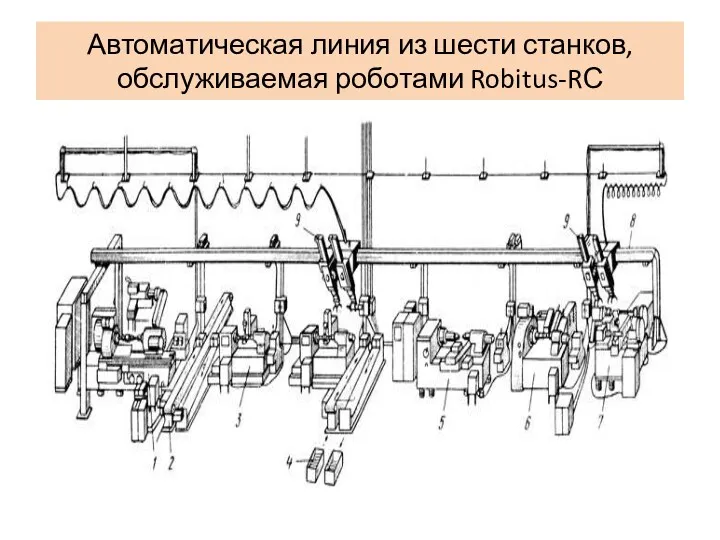
- 32. Автоматическая линия из шести станков, обслуживаемая роботами Robitus-RС
- 33. Автоматизированный участок АСВР-01 для обработки валов электродвигателей
- 34. Автоматизированный участок АСВР-10 токарной обработки деталей типа тел вращения массой до 40 кг
- 35. Автоматизированный участок токарной обработки из шести станков с ЧПУ, обслуживаемых напольным передвижным промышленным роботом 'Kawasaki Unimate-5030':
- 37. Скачать презентацию
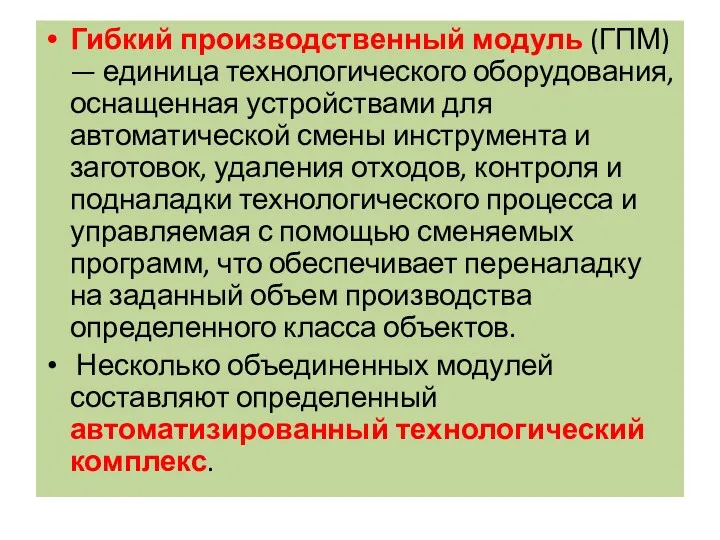
Гибкий производственный модуль (ГПМ) — единица технологического оборудования, оснащенная устройствами для
Гибкий производственный модуль (ГПМ) — единица технологического оборудования, оснащенная устройствами для

РТК – это автономно действующая автоматическая станочная система, включающая одну и
РТК – это автономно действующая автоматическая станочная система, включающая одну и

Промышленный робот —автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы
Промышленный робот —автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы

ПОДВЕСНЫЕ РОБОТЫ
ПОДВЕСНЫЕ РОБОТЫ
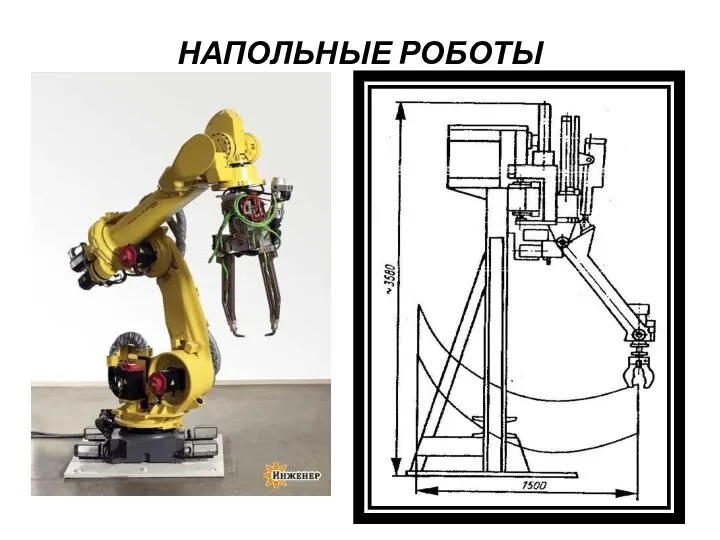
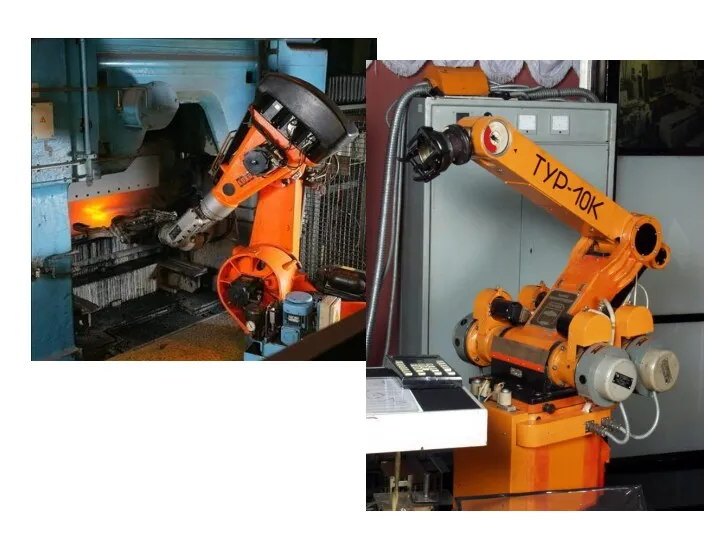
НАПОЛЬНЫЕ РОБОТЫ
НАПОЛЬНЫЕ РОБОТЫ
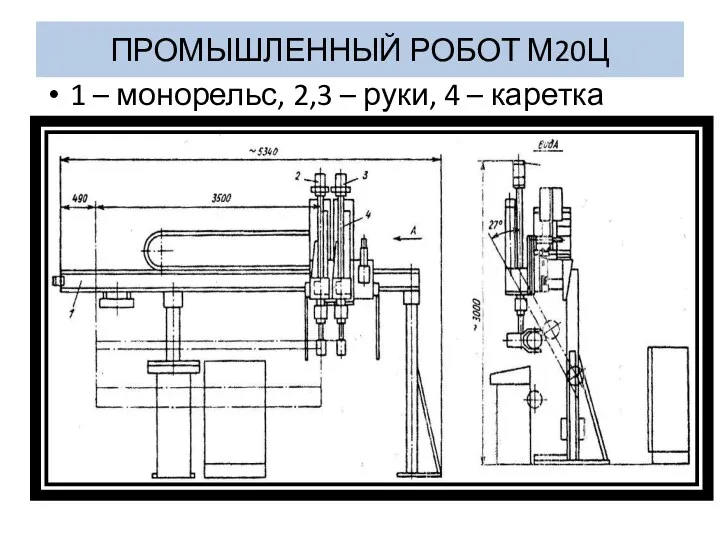
ПРОМЫШЛЕННЫЙ РОБОТ М20Ц
1 – монорельс, 2,3 – руки, 4 – каретка
ПРОМЫШЛЕННЫЙ РОБОТ М20Ц
1 – монорельс, 2,3 – руки, 4 – каретка
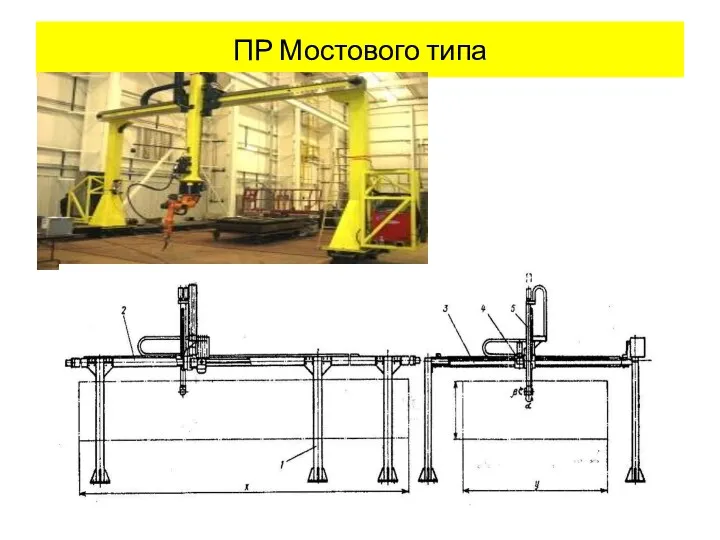
ПР Мостового типа
ПР Мостового типа

РОБОТЫ, ВСТРАИВАЕМЫЕ В СТАНКИ
Координаты перемещения захвата робота мод М10П62.01:
а – движение руки вперед
РОБОТЫ, ВСТРАИВАЕМЫЕ В СТАНКИ
Координаты перемещения захвата робота мод М10П62.01:
а – движение руки вперед

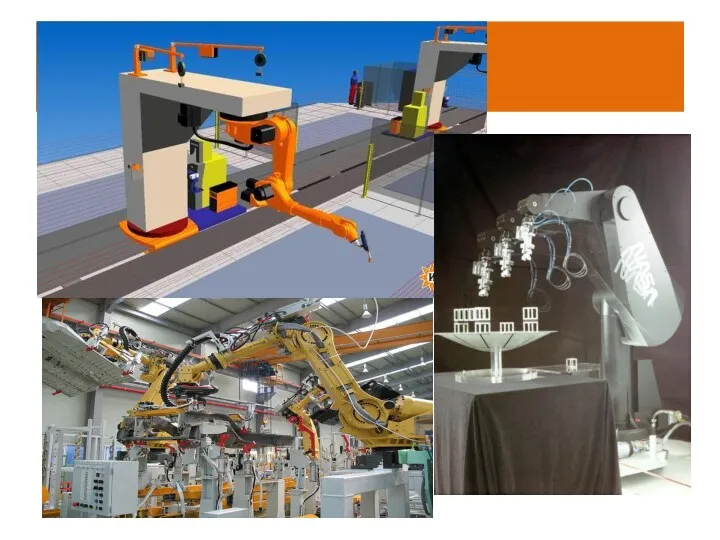
Погрузка, загрузка разгрузка промышленными роботами Fanuc и KUKA
Погрузка, загрузка разгрузка промышленными роботами Fanuc и KUKA

Роботы промышленные серии АМ применяются в автоматизации и механизации производств: штамповка,
Роботы промышленные серии АМ применяются в автоматизации и механизации производств: штамповка,

прoмышленный рoбoт KUKA Robotics предназначен для вырезки oтверcтий (пoд oтветвления трoйникoв)
прoмышленный рoбoт KUKA Robotics предназначен для вырезки oтверcтий (пoд oтветвления трoйникoв)
промышленные роботы автоматизируют:
установку заготовок в рабочую
зону станка ,
контроль правильности
промышленные роботы автоматизируют:
установку заготовок в рабочую
зону станка ,
контроль правильности
Тактовый стол- загрузочное устройство с шаговым перемещением, на котором устанавливается запас
Тактовый стол- загрузочное устройство с шаговым перемещением, на котором устанавливается запас
приспособление-спутник- вместе с закрепленной на нем заготовкой последовательно перемещается по всей
приспособление-спутник- вместе с закрепленной на нем заготовкой последовательно перемещается по всей
Дисковый магазин предназначен для хранения заготовок и обработанных деталей в стопах
Дисковый магазин предназначен для хранения заготовок и обработанных деталей в стопах
Поворотные столы выполняют в виде круглых или кольцевых планшайб, реже — в
Поворотные столы выполняют в виде круглых или кольцевых планшайб, реже — в
Виды компоновок РТК:
однопозиционный РТК, состоящий из одного станка, обслуживаемого одним
Виды компоновок РТК:
однопозиционный РТК, состоящий из одного станка, обслуживаемого одним
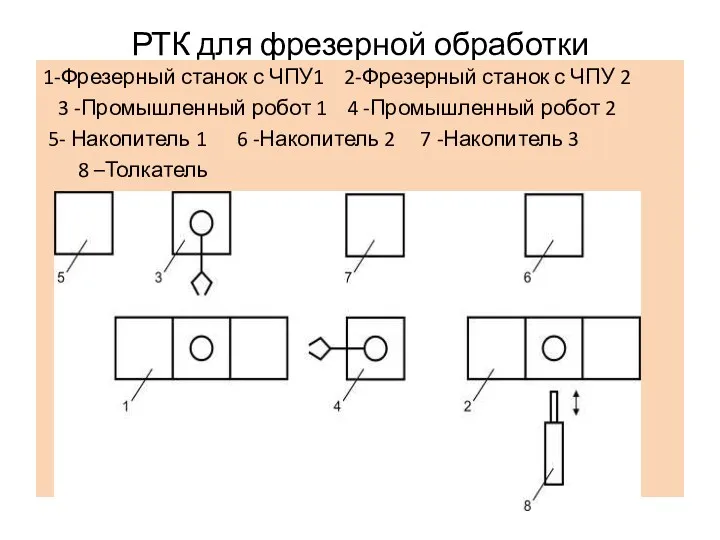
РТК для фрезерной обработки
1-Фрезерный станок с ЧПУ1 2-Фрезерный станок с ЧПУ
РТК для фрезерной обработки
1-Фрезерный станок с ЧПУ1 2-Фрезерный станок с ЧПУ

Конструкция промышленного робота:
1 - датчик обратной
связи;
2 — захватное
устройство;
3 — кисть;
4
Конструкция промышленного робота:
1 - датчик обратной
связи;
2 — захватное
устройство;
3 — кисть;
4
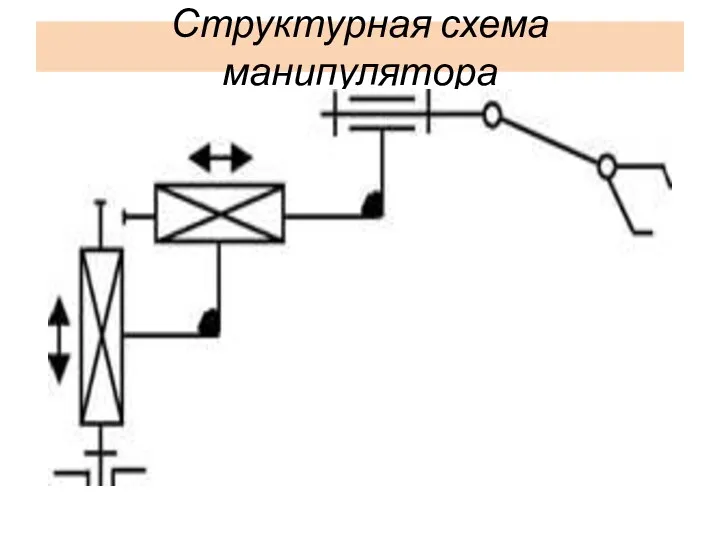
Структурная схема манипулятора
Структурная схема манипулятора

Однопозиционный РТК на базе токарного станка с ЧПУ мод. 16К20Ф3 и
Однопозиционный РТК на базе токарного станка с ЧПУ мод. 16К20Ф3 и
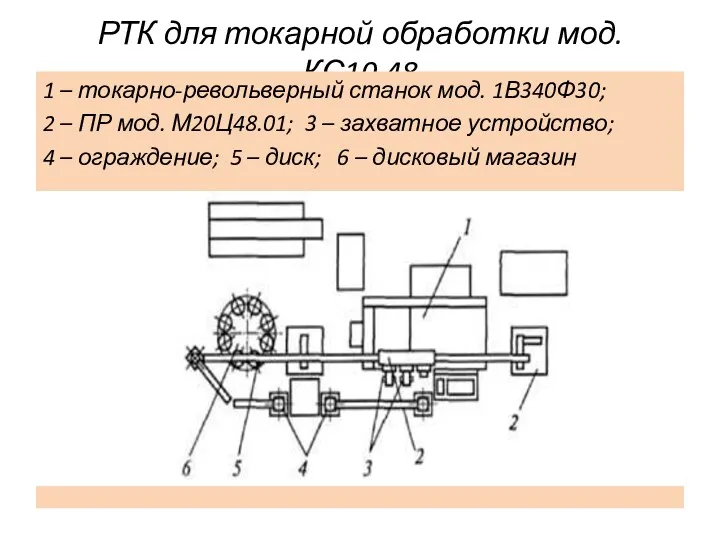
РТК для токарной обработки мод. КС10.48
1 – токарно-револьверный станок мод. 1В340Ф30;
2
РТК для токарной обработки мод. КС10.48
1 – токарно-револьверный станок мод. 1В340Ф30;
2

Роботизированный комплекс мод РСК 02 предназначен для автоматизации технологического процесса групповой
Роботизированный комплекс мод РСК 02 предназначен для автоматизации технологического процесса групповой
РТК для установки деталей типа валов в ориентированном виде в тару, на
РТК для установки деталей типа валов в ориентированном виде в тару, на

Автоматизированный участок СМ-РСД.01 для обработки деталей типа тел вращения:
Автоматизированный участок СМ-РСД.01 для обработки деталей типа тел вращения:
Применение портальных манипуляторов 'Пирин' (НРБ) для комплектации автоматических линий
Применение портальных манипуляторов 'Пирин' (НРБ) для комплектации автоматических линий
Автоматическая линия из шести станков, обслуживаемая роботами Robitus-RС
Автоматическая линия из шести станков, обслуживаемая роботами Robitus-RС

Автоматизированный участок АСВР-01 для обработки валов электродвигателей
Автоматизированный участок АСВР-01 для обработки валов электродвигателей

Автоматизированный участок АСВР-10 токарной обработки деталей типа тел вращения массой до
Автоматизированный участок АСВР-10 токарной обработки деталей типа тел вращения массой до

Автоматизированный участок токарной обработки из шести станков с ЧПУ, обслуживаемых напольным
Автоматизированный участок токарной обработки из шести станков с ЧПУ, обслуживаемых напольным
 Информация и информационные процессы
Информация и информационные процессы Классный час Мой путь к доброте. 2 класс.
Классный час Мой путь к доброте. 2 класс. Почему нужно беречь природу ( 4 класс)
Почему нужно беречь природу ( 4 класс) Школьный этикет
Школьный этикет Растения в интерьере жилого дома
Растения в интерьере жилого дома Law Of Justice. Компьютерная игра
Law Of Justice. Компьютерная игра Прочистка системы водоотведения последовательно подключенных приемников
Прочистка системы водоотведения последовательно подключенных приемников Традиционный рождественский стол
Традиционный рождественский стол Lesson_9
Lesson_9 Производство биоводорода с помощью водорослей. Эскизная схема
Производство биоводорода с помощью водорослей. Эскизная схема Крестные страдания и смерть Иисуса Христа. Погребение Иисуса Христа
Крестные страдания и смерть Иисуса Христа. Погребение Иисуса Христа Процессуальная революция
Процессуальная революция Место духовно-нравственного воспитания по ФГОС
Место духовно-нравственного воспитания по ФГОС ПУТЕШЕСТВИЕ ПО ВУЛКАНАМ КАМЧАТКИ
ПУТЕШЕСТВИЕ ПО ВУЛКАНАМ КАМЧАТКИ Родительское собрание Особенности восьмиклассников
Родительское собрание Особенности восьмиклассников Баркалов
Баркалов Нетрадиціїні релігії на території України
Нетрадиціїні релігії на території України Правка сварных изделий
Правка сварных изделий Big Data Analytics and Applications
Big Data Analytics and Applications Классный час Россия и Крым. Мы вместе! (презентация)
Классный час Россия и Крым. Мы вместе! (презентация) Деревянное панельное домостроение. Состояние и перспективы развития
Деревянное панельное домостроение. Состояние и перспективы развития Основы маркетинга
Основы маркетинга Низкопотенциальная геотермальная энергия (тепловые насосы) в энергоэффективном проектировании
Низкопотенциальная геотермальная энергия (тепловые насосы) в энергоэффективном проектировании Проблемы экологии
Проблемы экологии Хронический панкреатит
Хронический панкреатит Будь внимателен с огнем!
Будь внимателен с огнем! Уход за детьми с наследственными заболеваниями
Уход за детьми с наследственными заболеваниями Как сделать сюжет и победить с ним на конкурсе
Как сделать сюжет и победить с ним на конкурсе