- Интерфейсы ввода-вывода. Последовательный интерфейс. Интерфейс RS-232C. (Лекция 8)

Содержание
- 2. Последовательные интерфейсы •Уменьшается количество линий для связи •Улучшается помехоустойчивость •Увеличивается дальность связи •Упрощается организация гальванической развязки
- 3. Программируемый адаптер последо-вательного интерфейса. В основе последовательного порта передачи данных лежит использование микросхем универсальных приемопередатчиков. Некоторые
- 4. Типичным примером УСАПП является микросхема КР580ВВ51, реализующая практически любой способ последовательной связи. Далее ради краткости она
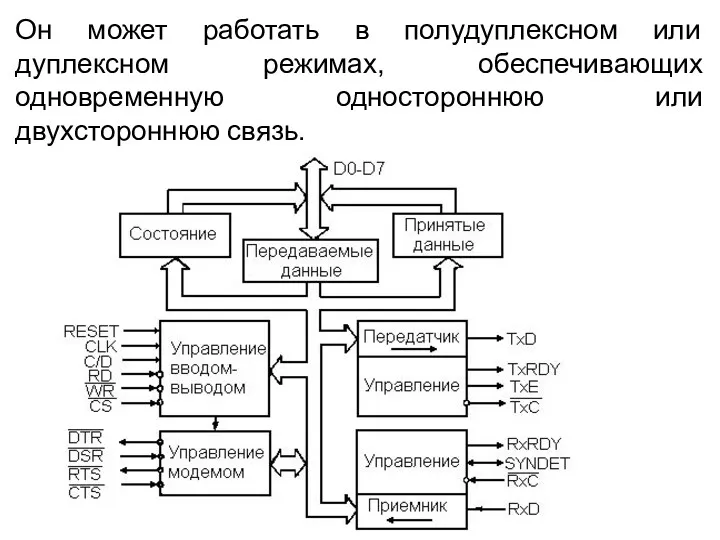
- 5. Он может работать в полудуплексном или дуплексном режимах, обеспечивающих одновременную одностороннюю или двухстороннюю связь.
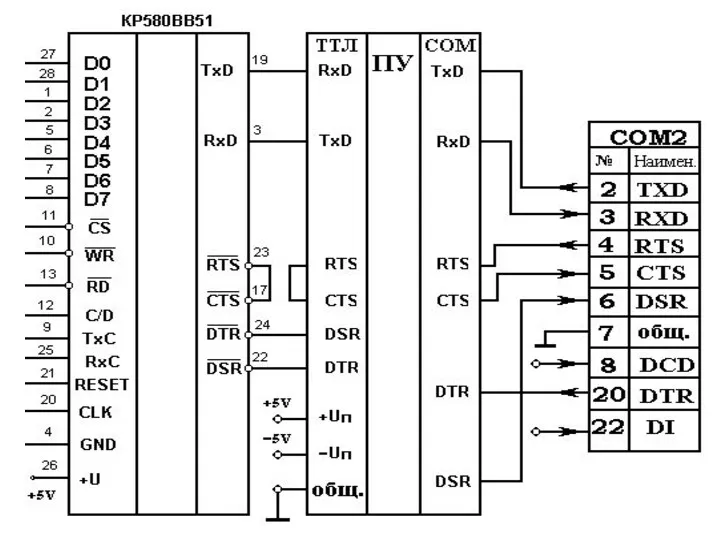
- 6. На рис. приведена структурная схема адаптера. Рассмотрим основные компоненты адаптера. Параллельный 8-битный дву-направленный буфер шины данных
- 7. Схема управления воспринимает сигналы с шины управления и генерирует внутренние управ-ляющие сигналы. В ее составе имеются
- 8. RЕSЕТ (сброс) ‑ Н ‑ активный сигнал сброса с минимальной длительностью 6 периодов синхронизации (H соответ-ствует
- 9. RD (считывание) – L ‑ активный сигнал, инициирующий передачу данных или состояния из адаптера на шину
- 10. ТхD (выход передатчика) ‑ выходная линия, по которой действуют сигналы передаваемых данных. ТхС (синхронизация передатчика) ‑
- 11. ТхЕ (пустой передатчик) ‑ Н ‑ активный выходной сигнал, обозначающий отсутствие в адаптере символа для передачи.
- 12. ТхRDY (готовность передатчика) ‑ Н ‑ активный выходной сигнал, определяющий готовность передатчика к восприятию символа. Используется
- 13. RхD (вход приемника) ‑ входная линия, по которой передаются сигналы принимаемых последовательных данных. RхС (синхронизация приемника)
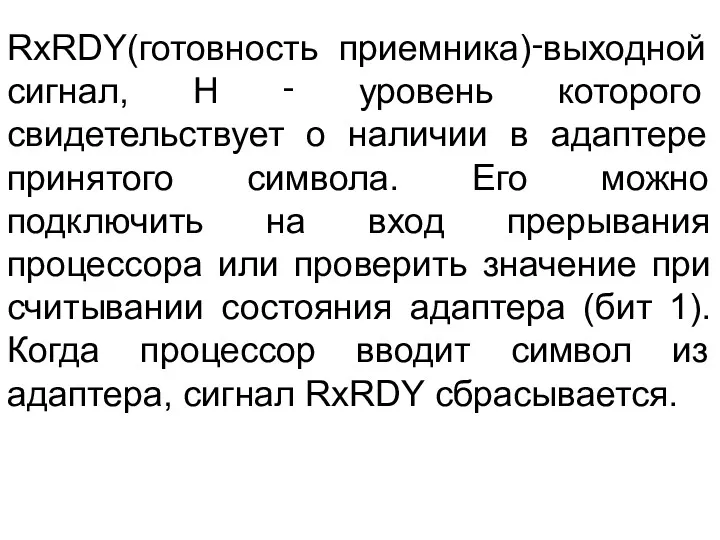
- 14. RхRDY(готовность приемника)‑выходной сигнал, Н ‑ уровень которого свидетельствует о наличии в адаптере принятого символа. Его можно
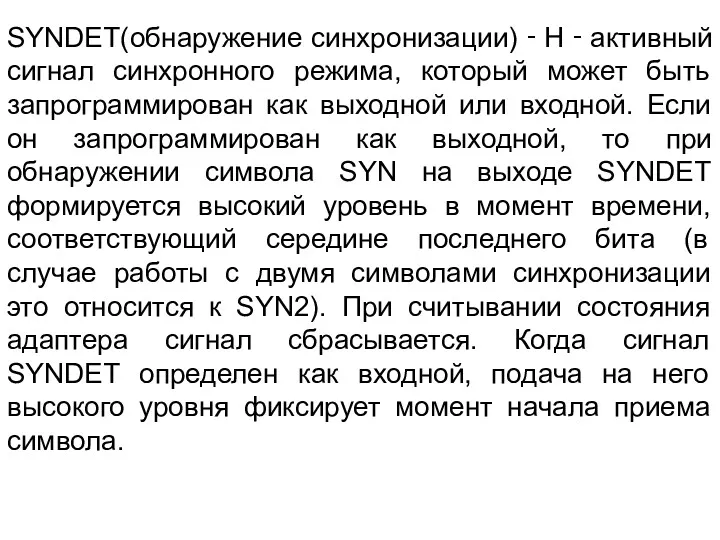
- 15. SYNDET(обнаружение синхронизации) ‑ Н ‑ активный сигнал синхронного режима, который может быть запрограммирован как выходной или
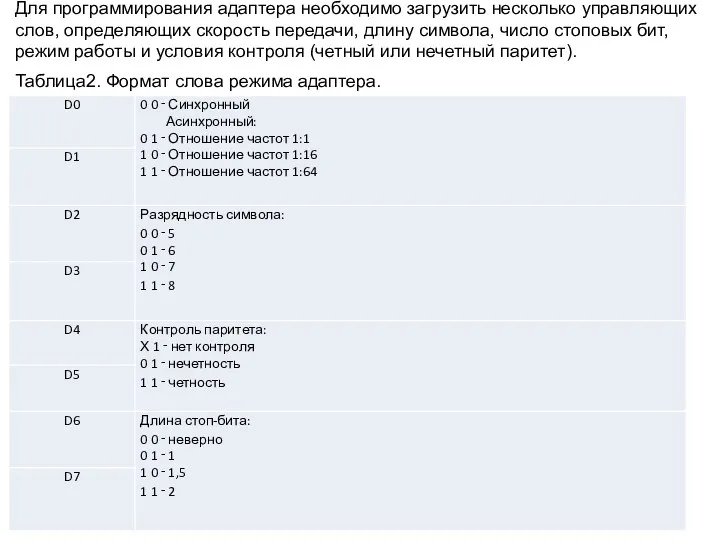
- 16. Для программирования адаптера необходимо загрузить несколько управляющих слов, определяющих скорость передачи, длину символа, число стоповых бит,
- 17. Таблица. 3. Управляющее слово приказа.
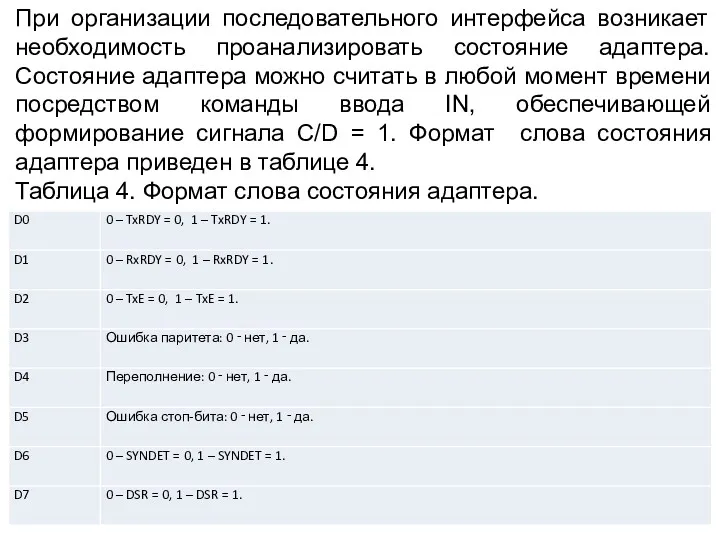
- 18. При организации последовательного интерфейса возникает необходимость проанализировать состояние адаптера. Состояние адаптера можно считать в любой момент
- 19. Последовательный интерфейс — СОМ-порт Универсальный внешний последовательный интерфейс — СОМ-порт (Communications Port — коммуникационный порт) присутствует
- 20. С внешней стороны порты имеют линии последовательных данных передачи и приема, а также набор сигналов управления
- 21. Название порта указывает на его основное назначение — подключение коммуникационного оборудования (например, модема) для связи с
- 22. Интерфейс RS-232C Интерфейс RS-232C предназначен для подключения аппаратуры, передающей или принимающей данные ( 00Д — оконечное
- 24. Последовательный интерфейс RS-232 •Сигнал представляется уровнем напряжения •Минимальный набор линий связи: Tx и Rx (Transmit, Receive)
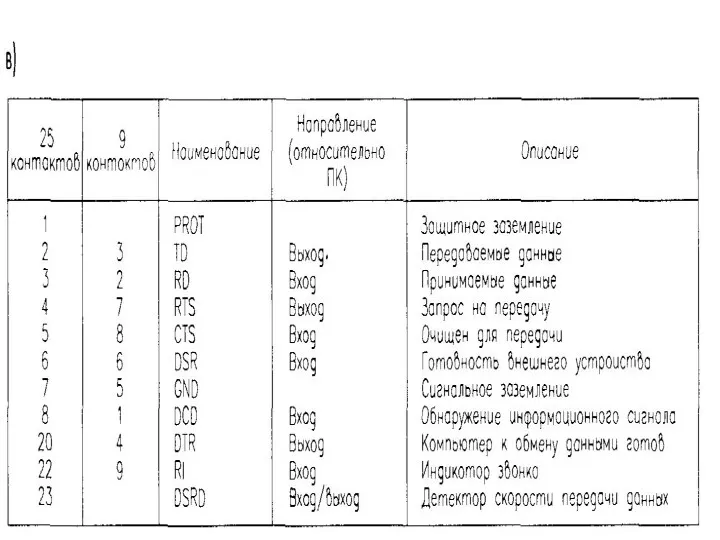
- 27. Сигналы RS-232C •TD (Transmit Data) передаваемые данные •RX (Receive Data)принимаемые данные •RTS(Request To Send) выход запроса
- 28. Порты асинхронного адаптера На этапе инициализации системы модуль POST BIOS тестирует имеющиеся синхронные адаптеры и инициализирует
- 29. Порт 3F8h. Этот порт соответствует регистру передаваемых данных. Для передачи в порт 3F8h необходимо записать передаваемый
- 30. Скорость передачи данных зависит от значения делителя частоты. Например, для скорости передачи 600 бод делитель равен
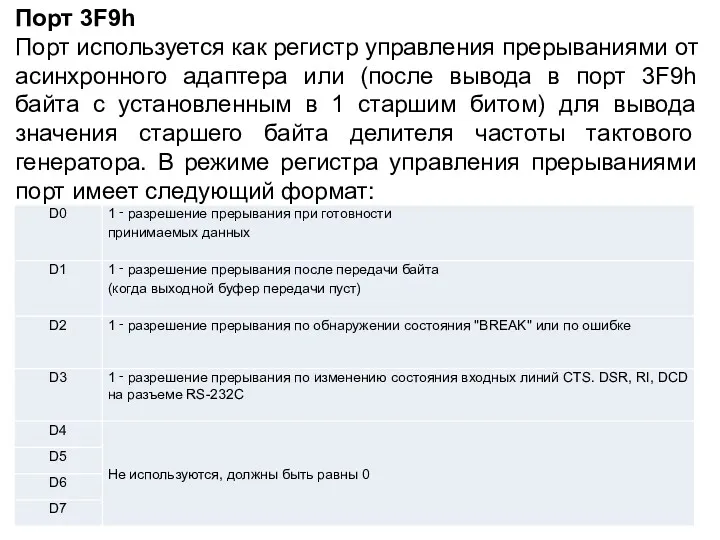
- 31. Порт 3F9h Порт используется как регистр управления прерываниями от асинхронного адаптера или (после вывода в порт
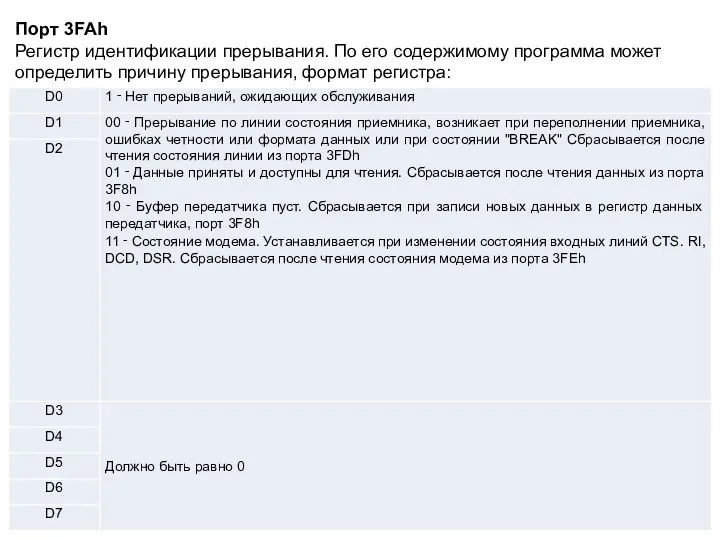
- 32. Порт 3FAh Регистр идентификации прерывания. По его содержимому программа может определить причину прерывания, формат регистра:
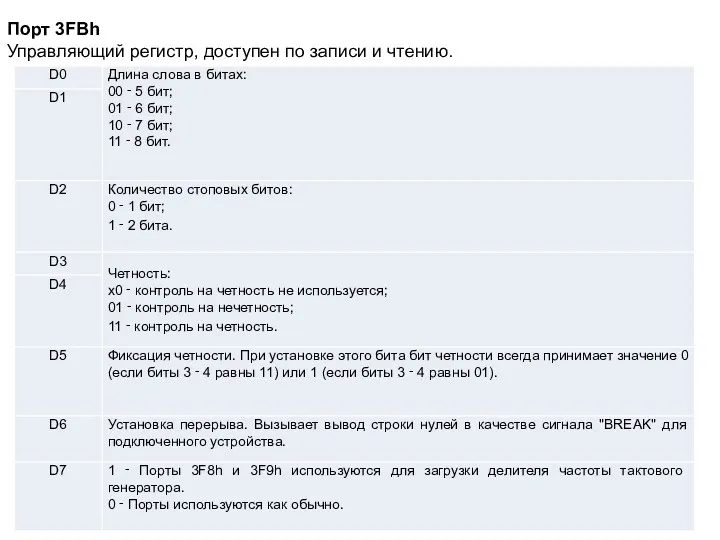
- 33. Порт 3FBh Управляющий регистр, доступен по записи и чтению.
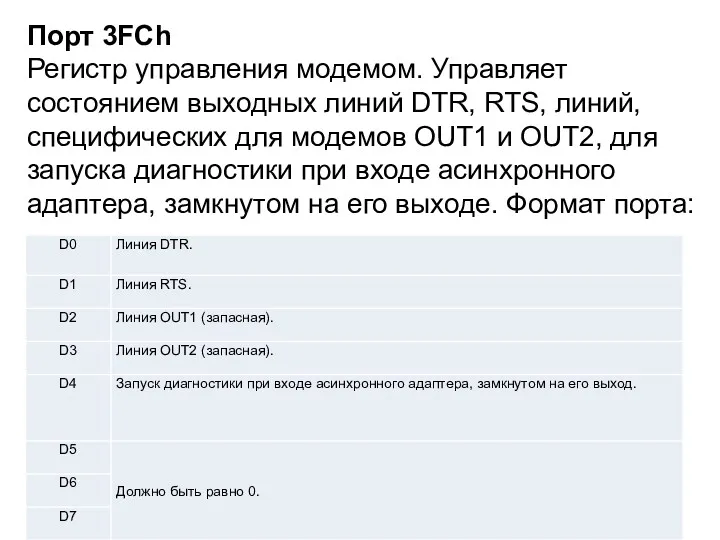
- 34. Порт 3FCh Регистр управления модемом. Управляет состоянием выходных линий DTR, RTS, линий, специфических для модемов OUT1
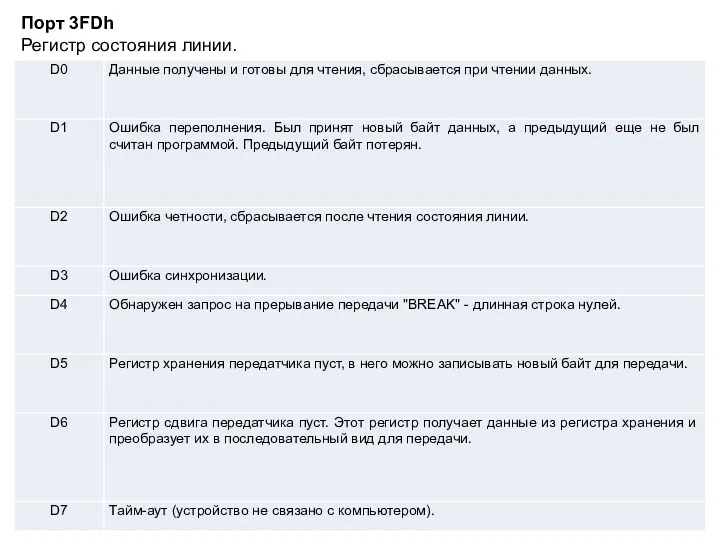
- 35. Порт 3FDh Регистр состояния линии.
- 36. Порт 3FEh Регистр состояния модема.
- 37. Установкой DSR модем сигнализирует о своей готовности и установлении соединения. Установкой DTR компьютер указывает на желание
- 38. Снятие RTS может означать как заполнение буфера компьютера (модем должен приостановить передачу данных в компьютер), так
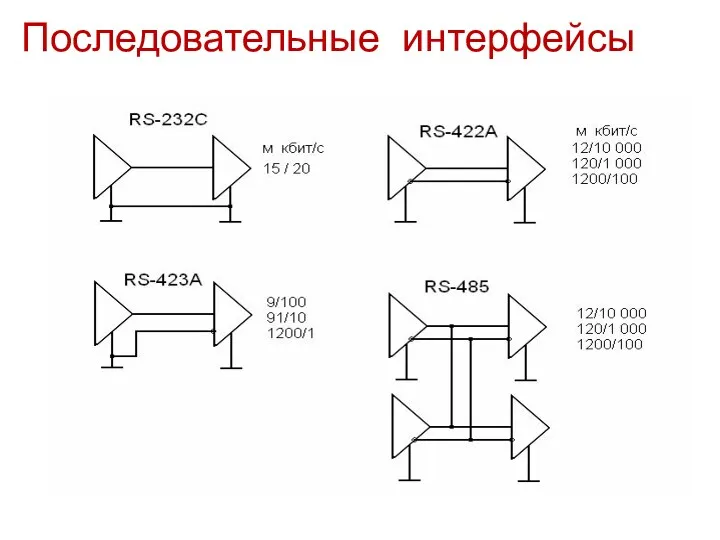
- 44. Последовательные интерфейсы
- 45. Топология интерфейсов: а — RS-422, б — RS-485 четырехпроводный, в — RS-485 двухпроводный
- 46. Когда требуется большая помехоустойчивость (дальность и скорость передачи), применяют иные электрические варианты последовательных интерфейсов: RS-422A (V.11,
- 47. Интерфейсы EIA-RS-422 (ITU-T V.ll, X.27) и EIA-RS-485 (ISO 8482) используют симметричную передачу сигнала и допускают как
- 48. На выходах передатчика сигналы UA и UB обычно переключаются между уровнями 0 и +5 В (КМОП)
- 49. I2C-Inter-IntegratedCircuit SPI(Serial Peripheral Interface) КОП(GPIB)–канал общего поль-зования (General-Purpose Interface bus) CAN (Controller Area Network)
- 50. Последовательный интер-фейс I2C. •Двунаправленный обмен по двум линиям (SCL, SDA) •Cкорость обмена -до100 кбит •Возможность адресации
- 51. •Обе линии –с открытым коллекто-ром •Master–источник сигнала SCL (тактового) •Данные меняются только при низком уровне SCL
- 52. •Формат посылки –«старт»-условие –7 бит –адрес Slave-устройства, которому предназначена посылка –1 бит –чтение(1)/запись(0) –8 бит данных
- 53. Philips разработала простую двунаправленную двухпроводную шину для эффективного “межмикросхемного” (inter-IC) управления. Шина так и называется -
- 54. Все I2C-совместимые устройства имеют встроенный интерфейс, который позволяет им связываться друг с другом по шине I2C.
- 55. Вот некоторые достоинства шины I2C: Требуется только две линии - линия данных (SDA) и линия синхронизации
- 56. I2C-совместимые микросхемы не только помогают конструкторам, но и дают широкий диапазон преимуществ для технологов, потому что:
- 57. Полностью интегрированный I2C-протокол устраняет нужду в дешифраторах адреса и другой внешней мелкой логике. Возможность нескольких “ведущих”
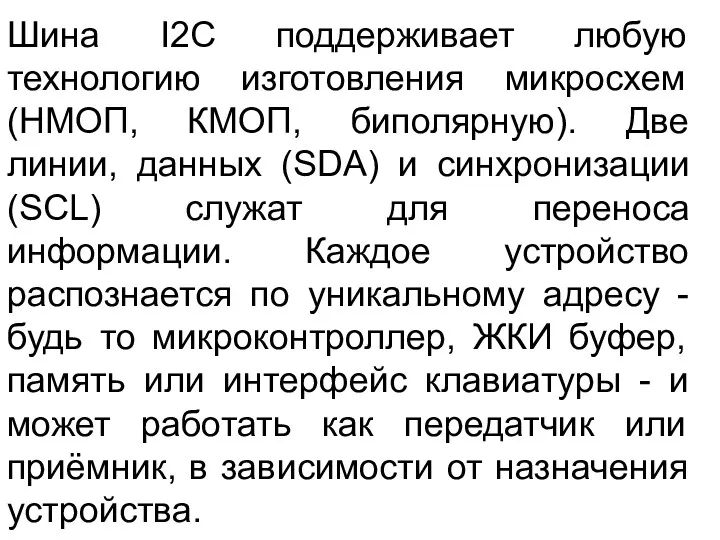
- 58. Шина I2C поддерживает любую технологию изготовления микросхем (НМОП, КМОП, биполярную). Две линии, данных (SDA) и синхронизации
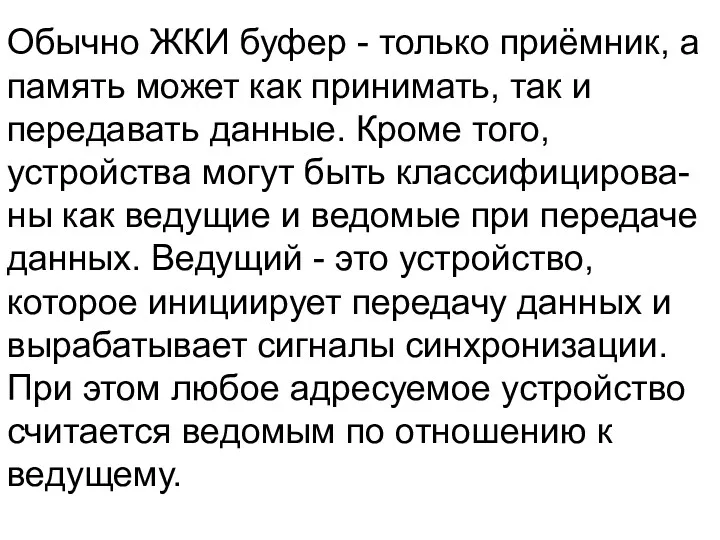
- 59. Обычно ЖКИ буфер - только приёмник, а память может как принимать, так и передавать данные. Кроме
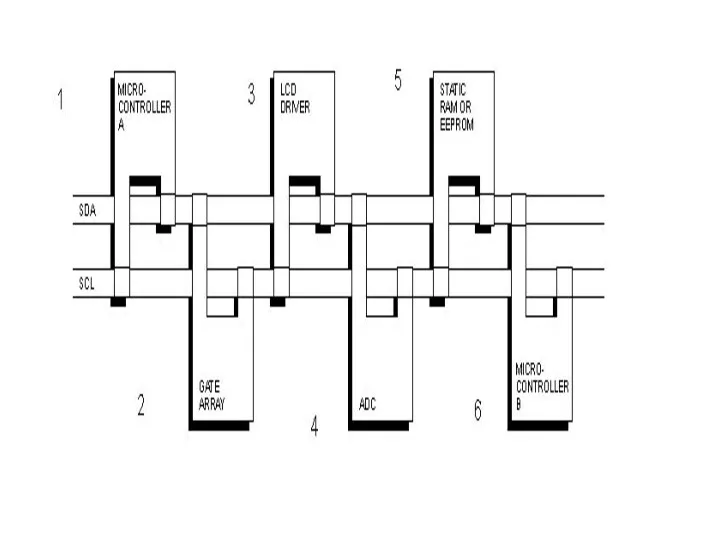
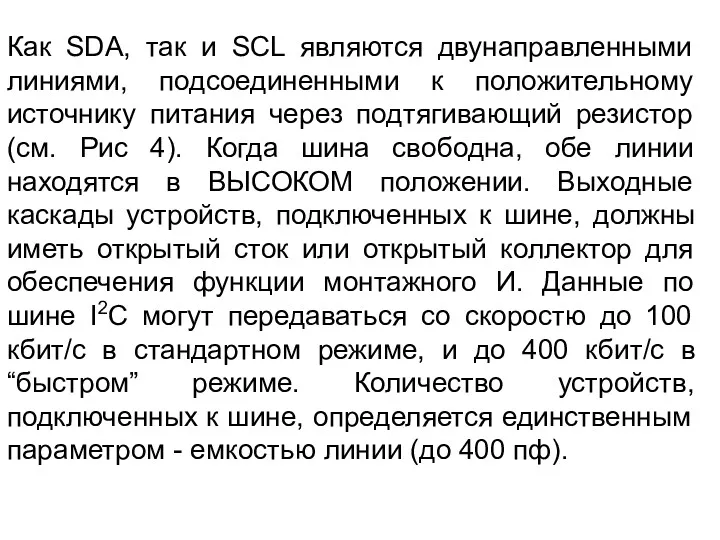
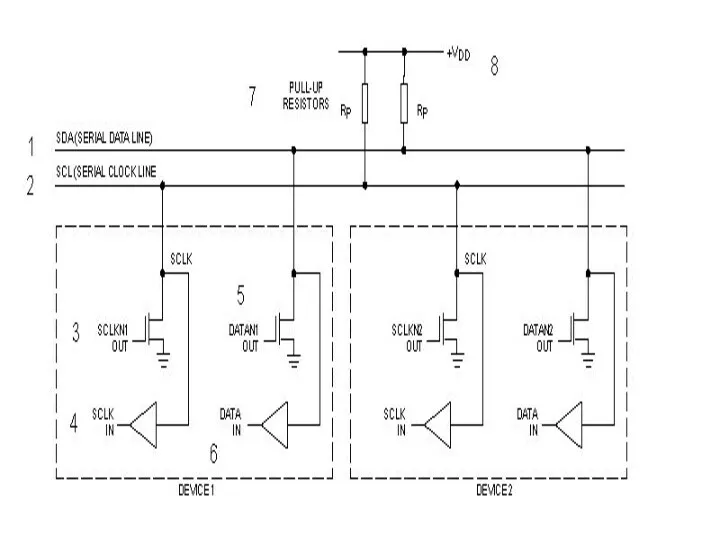
- 61. Как SDA, так и SCL являются двунаправленными линиями, подсоединенными к положительному источнику питания через подтягивающий резистор
- 63. Специальные ситуации на шине отмечают сигналы START и STOP Переход линии SDA из ВЫСОКОГО состояния в
- 64. Каждый байт, передаваемый по линии SDA, должен состоять из 8 бит. Количество байт, передаваемых за один
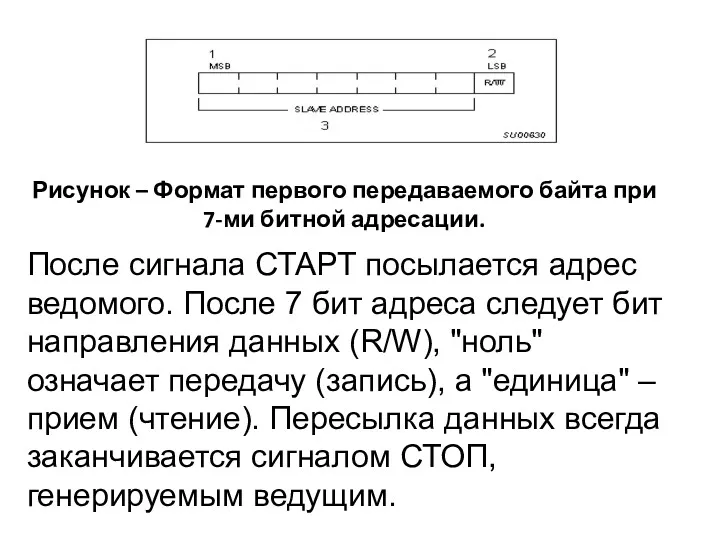
- 65. Форматы с 7-битным адресом Посылки данных происходят в формате, показанном на рис. 11. После сигнала СТАРТ
- 66. После сигнала СТАРТ посылается адрес ведомого. После 7 бит адреса следует бит направления данных (R/W), "ноль"
- 67. Ведущий-передатчик передает данные ведомому-приёмнику. Направление пересылки данных не изменяется. Рисунок – Формат первого передаваемого байта при
- 68. 10-битная адресация не меняет формат шины. Для этого используется зарезервированная адресная комбинация 1111ХХХ первых семи бит
- 72. Последовательный интер-фейс SPI. SPI интерфейс – трех- проводной интерфейс предназначенный для синх-ронного двухстороннего дуплексного обмена данными
- 73. SPI(Serial Peripheral Interface) •MISO- MasterIn, Slave Out-выход ведомого, вход ведущего. MOSI-Master Out, SlaveIn -вход ведомого, выход
- 74. •Стандартный периферийный порт микроконтроллеров •Подключение внешних устройств с невысокой скоростью обмена •Для чтения достаточно двух линий
- 75. SPI - популярный интерфейс для последовательного обмена данными между микросхемами. Интерфейс SPI, наряду с I2C, относится
- 76. Шина SPI организована по принципу 'ведущий-подчиненный'. В качестве ведущего шины обычно выступает микроконтроллер, но им также
- 77. Простейшее подключение к шине SPI Самое простое подключение, в котором участвуют только две микросхемы, показано на
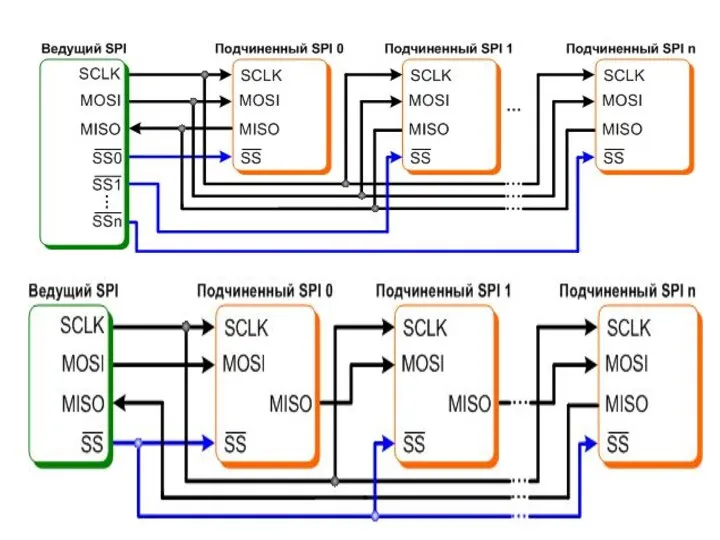
- 78. При необходимости подключения к шине SPI нескольких микросхем используется либо независимое (параллельное) подключение, либо каскадное (последовательное)
- 80. КОП(GPIB)–канал общего пользования (General-Purpose Interface bus) •== ГОСТ 26.003-80 («Система интерфейса для измерительных устройств с байт-последовательным,
- 81. •Не более 15 устройств одновременно на шине, включено не менее 2/3 (при выключе-нии любого количества устройству
- 82. •Линии интерфейса: –ЛД0 –ЛД7 (DIO) линии данных –СД (DAV, Data Valid) сопровождение данных –ГП (NRFD, Not
- 83. •Все сообщения через КОП подразделяются на: –Интерфейсные сообщения –Сообщения устройств •19 групп команд •Исчерпывающий контроль состояний
- 84. •Приборы имеют собственные наборы команд, которые должны быть переданы в обычном режиме (УП неактивен) •Существует большое
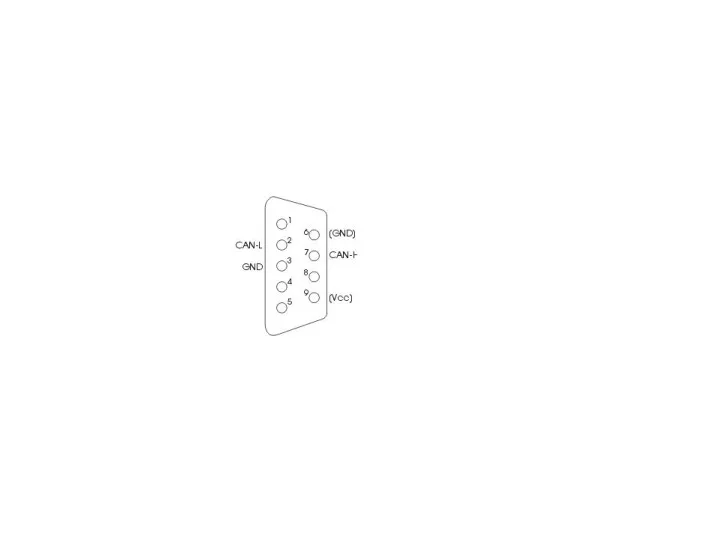
- 85. CAN (Controller Area Network) •Интерфейс с высокой надежностью, ориентированный на применение в автомобилестроении •Три провода (2
- 86. CAN (Control Area Network) - последовательная магистраль, обеспечивающая увязку в сеть "интеллектуальных" устройств ввода/вывода, датчиков и
- 89. Скачать презентацию
Последовательные интерфейсы
•Уменьшается количество линий для связи
•Улучшается помехоустойчивость
•Увеличивается дальность связи
•Упрощается организация гальванической
•Уменьшается количество линий для связи
•Улучшается помехоустойчивость
•Увеличивается дальность связи
•Упрощается организация гальванической
Программируемый адаптер последо-вательного интерфейса.
В основе последовательного порта передачи данных лежит использование
Программируемый адаптер последо-вательного интерфейса.
В основе последовательного порта передачи данных лежит использование
Типичным примером УСАПП является микросхема КР580ВВ51, реализующая практически любой способ последовательной
Типичным примером УСАПП является микросхема КР580ВВ51, реализующая практически любой способ последовательной
Он может работать в полудуплексном или дуплексном режимах, обеспечивающих одновременную одностороннюю
Он может работать в полудуплексном или дуплексном режимах, обеспечивающих одновременную одностороннюю
На рис. приведена структурная схема адаптера. Рассмотрим основные компоненты адаптера. Параллельный
На рис. приведена структурная схема адаптера. Рассмотрим основные компоненты адаптера. Параллельный
Схема управления воспринимает сигналы с шины управления и генерирует внутренние управ-ляющие
Схема управления воспринимает сигналы с шины управления и генерирует внутренние управ-ляющие
RЕSЕТ (сброс) ‑ Н ‑ активный сигнал сброса с минимальной длительностью
RЕSЕТ (сброс) ‑ Н ‑ активный сигнал сброса с минимальной длительностью
RD (считывание) – L ‑ активный сигнал, инициирующий передачу данных или
RD (считывание) – L ‑ активный сигнал, инициирующий передачу данных или
ТхD (выход передатчика) ‑ выходная линия, по которой действуют сигналы передаваемых
ТхD (выход передатчика) ‑ выходная линия, по которой действуют сигналы передаваемых
ТхЕ (пустой передатчик) ‑ Н ‑ активный выходной сигнал, обозначающий отсутствие
ТхЕ (пустой передатчик) ‑ Н ‑ активный выходной сигнал, обозначающий отсутствие
ТхRDY (готовность передатчика) ‑ Н ‑ активный выходной сигнал, определяющий готовность
ТхRDY (готовность передатчика) ‑ Н ‑ активный выходной сигнал, определяющий готовность
RхD (вход приемника) ‑ входная линия, по которой передаются сигналы принимаемых
RхD (вход приемника) ‑ входная линия, по которой передаются сигналы принимаемых
RхRDY(готовность приемника)‑выходной сигнал, Н ‑ уровень которого свидетельствует о наличии в
RхRDY(готовность приемника)‑выходной сигнал, Н ‑ уровень которого свидетельствует о наличии в
SYNDET(обнаружение синхронизации) ‑ Н ‑ активный сигнал синхронного режима, который может
SYNDET(обнаружение синхронизации) ‑ Н ‑ активный сигнал синхронного режима, который может
Для программирования адаптера необходимо загрузить несколько управляющих слов, определяющих скорость передачи,
Для программирования адаптера необходимо загрузить несколько управляющих слов, определяющих скорость передачи,

Таблица. 3. Управляющее слово приказа.
Таблица. 3. Управляющее слово приказа.
При организации последовательного интерфейса возникает необходимость проанализировать состояние адаптера. Состояние адаптера
При организации последовательного интерфейса возникает необходимость проанализировать состояние адаптера. Состояние адаптера
Последовательный интерфейс — СОМ-порт
Универсальный внешний последовательный интерфейс — СОМ-порт (Communications Port
Последовательный интерфейс — СОМ-порт
Универсальный внешний последовательный интерфейс — СОМ-порт (Communications Port
С внешней стороны порты имеют линии последовательных данных передачи и приема,
С внешней стороны порты имеют линии последовательных данных передачи и приема,
Название порта указывает на его основное назначение — подключение коммуникационного оборудования
Название порта указывает на его основное назначение — подключение коммуникационного оборудования
Интерфейс RS-232C
Интерфейс RS-232C предназначен для подключения аппаратуры, передающей или принимающей
Интерфейс RS-232C
Интерфейс RS-232C предназначен для подключения аппаратуры, передающей или принимающей

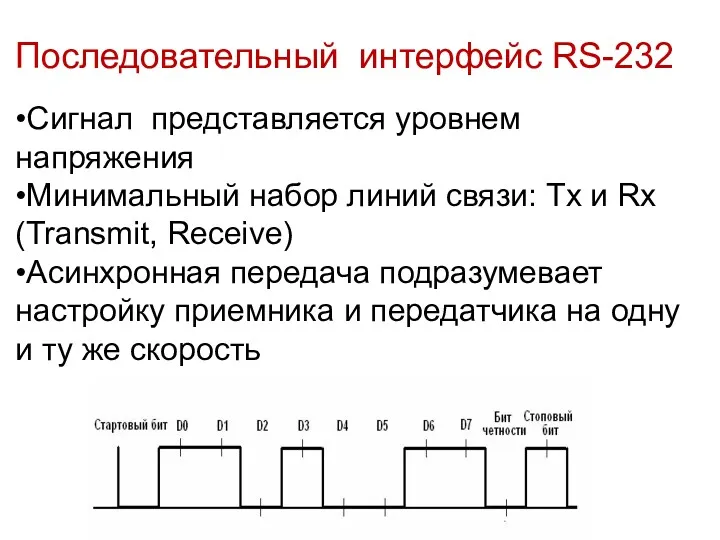
Последовательный интерфейс RS-232
•Сигнал представляется уровнем напряжения
•Минимальный набор линий связи: Tx и
•Сигнал представляется уровнем напряжения
•Минимальный набор линий связи: Tx и
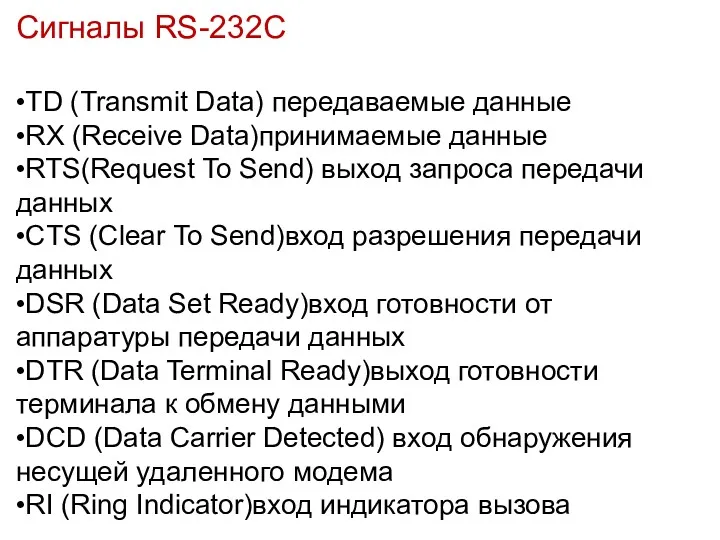
Сигналы RS-232C
•TD (Transmit Data) передаваемые данные
•RX (Receive Data)принимаемые данные
•RTS(Request To Send)
Сигналы RS-232C
•TD (Transmit Data) передаваемые данные
•RX (Receive Data)принимаемые данные
•RTS(Request To Send)
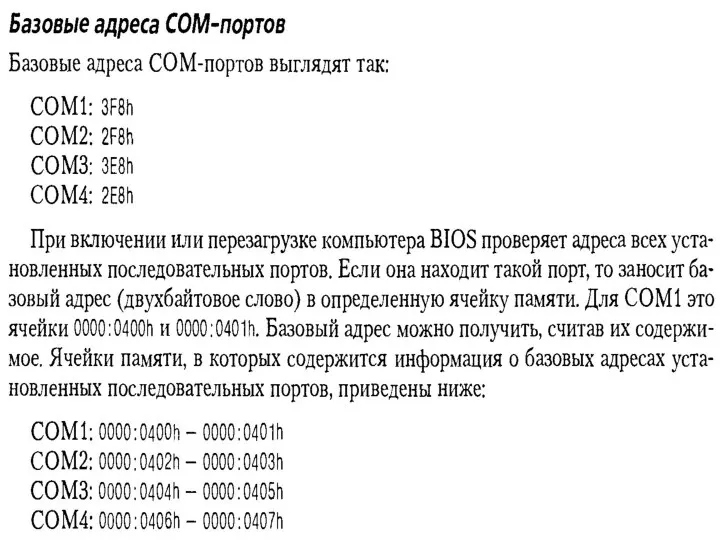
Порты асинхронного адаптера
На этапе инициализации системы модуль POST BIOS тестирует имеющиеся
Порты асинхронного адаптера
На этапе инициализации системы модуль POST BIOS тестирует имеющиеся
Порт 3F8h.
Этот порт соответствует регистру передаваемых данных. Для передачи в порт
Порт 3F8h.
Этот порт соответствует регистру передаваемых данных. Для передачи в порт
Скорость передачи данных зависит от значения делителя частоты. Например, для скорости
Скорость передачи данных зависит от значения делителя частоты. Например, для скорости
Порт 3F9h
Порт используется как регистр управления прерываниями от асинхронного адаптера или
Порт 3F9h
Порт используется как регистр управления прерываниями от асинхронного адаптера или
Порт 3FAh
Регистр идентификации прерывания. По его содержимому программа может определить причину
Порт 3FAh
Регистр идентификации прерывания. По его содержимому программа может определить причину
Порт 3FBh
Управляющий регистр, доступен по записи и чтению.
Порт 3FBh
Управляющий регистр, доступен по записи и чтению.
Порт 3FCh
Регистр управления модемом. Управляет состоянием выходных линий DTR, RTS, линий,
Порт 3FCh
Регистр управления модемом. Управляет состоянием выходных линий DTR, RTS, линий,
Порт 3FDh
Регистр состояния линии.
Порт 3FDh
Регистр состояния линии.

Порт 3FEh
Регистр состояния модема.
Порт 3FEh
Регистр состояния модема.
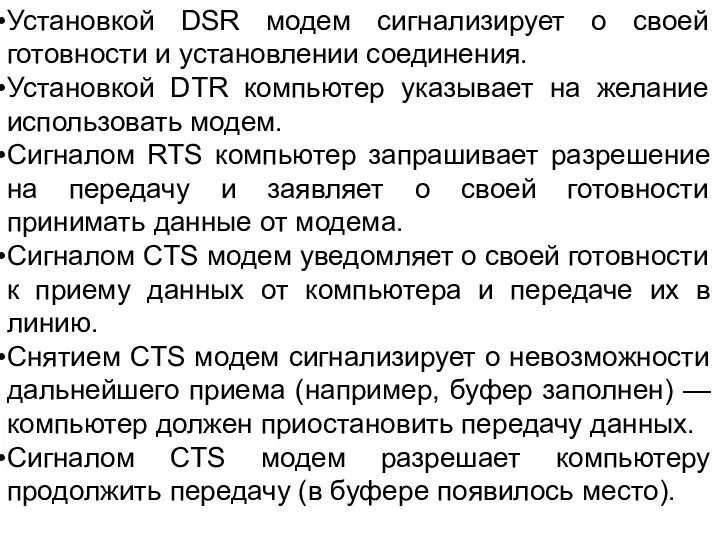
Установкой DSR модем сигнализирует о своей готовности и установлении соединения.
Установкой DTR
Установкой DSR модем сигнализирует о своей готовности и установлении соединения.
Установкой DTR
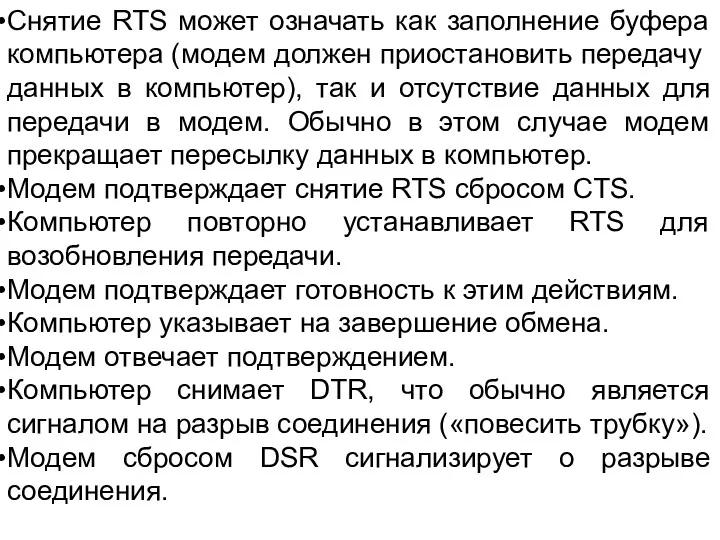
Снятие RTS может означать как заполнение буфера компьютера (модем должен приостановить
Снятие RTS может означать как заполнение буфера компьютера (модем должен приостановить

Последовательные интерфейсы
Последовательные интерфейсы
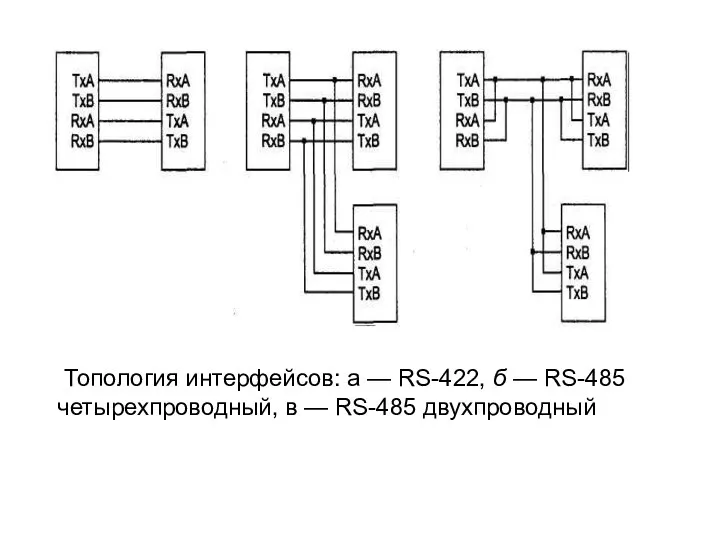
Топология интерфейсов: а — RS-422, б — RS-485 четырехпроводный, в
Топология интерфейсов: а — RS-422, б — RS-485 четырехпроводный, в
Когда требуется большая помехоустойчивость (дальность и скорость передачи), применяют иные электрические
Когда требуется большая помехоустойчивость (дальность и скорость передачи), применяют иные электрические
Интерфейсы EIA-RS-422 (ITU-T V.ll, X.27) и EIA-RS-485 (ISO 8482) используют симметричную
Интерфейсы EIA-RS-422 (ITU-T V.ll, X.27) и EIA-RS-485 (ISO 8482) используют симметричную
На выходах передатчика сигналы UA и UB обычно переключаются между уровнями
На выходах передатчика сигналы UA и UB обычно переключаются между уровнями
I2C-Inter-IntegratedCircuit
SPI(Serial Peripheral Interface)
КОП(GPIB)–канал общего поль-зования (General-Purpose Interface bus)
CAN (Controller Area Network)
I2C-Inter-IntegratedCircuit
SPI(Serial Peripheral Interface)
КОП(GPIB)–канал общего поль-зования (General-Purpose Interface bus)
CAN (Controller Area Network)
Последовательный интер-фейс I2C.
•Двунаправленный обмен по двум линиям (SCL, SDA)
•Cкорость обмена
•Двунаправленный обмен по двум линиям (SCL, SDA)
•Cкорость обмена
•Обе линии –с открытым коллекто-ром
•Master–источник сигнала SCL (тактового)
•Данные меняются только при
•Обе линии –с открытым коллекто-ром
•Master–источник сигнала SCL (тактового)
•Данные меняются только при
•Формат посылки
–«старт»-условие
–7 бит –адрес Slave-устройства, которому предназначена посылка
–1 бит –чтение(1)/запись(0)
–8 бит
•Формат посылки
–«старт»-условие
–7 бит –адрес Slave-устройства, которому предназначена посылка
–1 бит –чтение(1)/запись(0)
–8 бит
Philips разработала простую двунаправленную двухпроводную шину для эффективного “межмикросхемного” (inter-IC) управления.
Philips разработала простую двунаправленную двухпроводную шину для эффективного “межмикросхемного” (inter-IC) управления.
Все I2C-совместимые устройства имеют встроенный интерфейс, который позволяет им связываться друг
Все I2C-совместимые устройства имеют встроенный интерфейс, который позволяет им связываться друг
Вот некоторые достоинства шины I2C:
Требуется только две линии - линия данных
Вот некоторые достоинства шины I2C: Требуется только две линии - линия данных
I2C-совместимые микросхемы не только помогают конструкторам, но и дают широкий диапазон
I2C-совместимые микросхемы не только помогают конструкторам, но и дают широкий диапазон
Полностью интегрированный I2C-протокол устраняет нужду в дешифраторах адреса и другой внешней
Полностью интегрированный I2C-протокол устраняет нужду в дешифраторах адреса и другой внешней
Шина I2C поддерживает любую технологию изготовления микросхем (НМОП, КМОП, биполярную). Две
Шина I2C поддерживает любую технологию изготовления микросхем (НМОП, КМОП, биполярную). Две
Обычно ЖКИ буфер - только приёмник, а память может как принимать,
Обычно ЖКИ буфер - только приёмник, а память может как принимать,
Как SDA, так и SCL являются двунаправленными линиями, подсоединенными к положительному
Как SDA, так и SCL являются двунаправленными линиями, подсоединенными к положительному
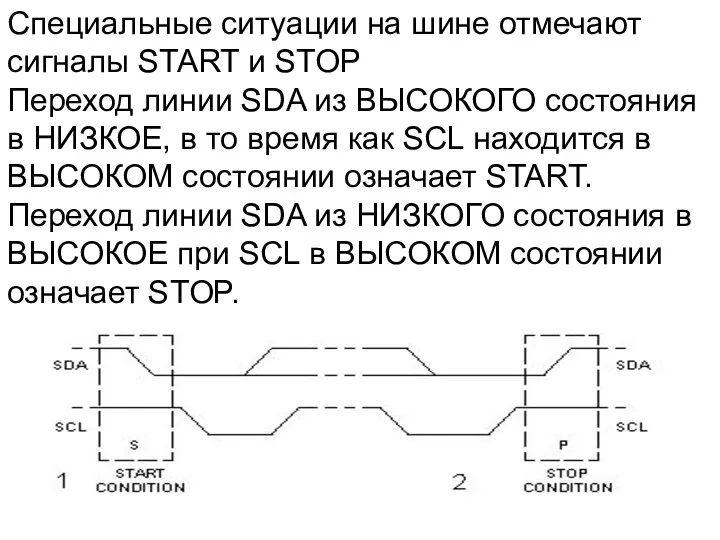
Специальные ситуации на шине отмечают сигналы START и STOP
Переход линии
Специальные ситуации на шине отмечают сигналы START и STOP Переход линии
Каждый байт, передаваемый по линии SDA, должен состоять из 8 бит.
Каждый байт, передаваемый по линии SDA, должен состоять из 8 бит.
Форматы с 7-битным адресом
Посылки данных происходят в формате, показанном на
Форматы с 7-битным адресом
Посылки данных происходят в формате, показанном на
После сигнала СТАРТ посылается адрес ведомого. После 7 бит адреса следует
После сигнала СТАРТ посылается адрес ведомого. После 7 бит адреса следует
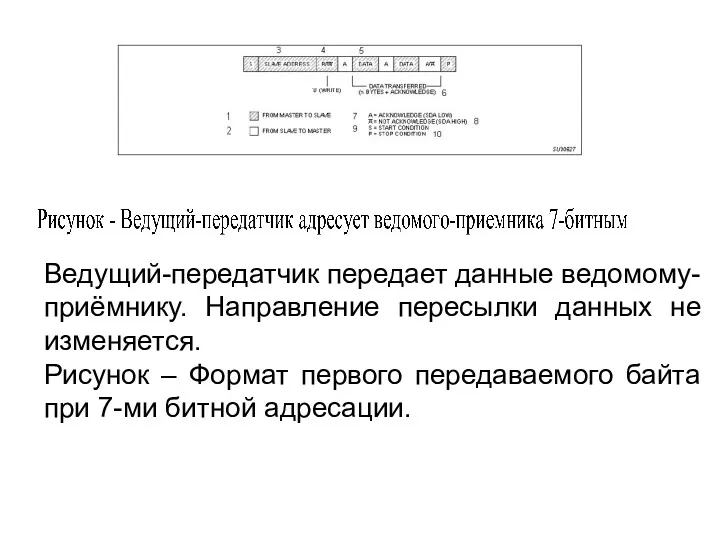
Ведущий-передатчик передает данные ведомому-приёмнику. Направление пересылки данных не изменяется.
Рисунок – Формат
Ведущий-передатчик передает данные ведомому-приёмнику. Направление пересылки данных не изменяется.
Рисунок – Формат
10-битная адресация не меняет формат шины. Для этого используется зарезервированная адресная
10-битная адресация не меняет формат шины. Для этого используется зарезервированная адресная



Последовательный интер-фейс SPI.
SPI интерфейс – трех- проводной интерфейс предназначенный для
Последовательный интер-фейс SPI.
SPI интерфейс – трех- проводной интерфейс предназначенный для
SPI(Serial Peripheral Interface)
•MISO- MasterIn, Slave Out-выход
ведомого, вход ведущего.
MOSI-Master Out, SlaveIn
SPI(Serial Peripheral Interface)
•MISO- MasterIn, Slave Out-выход
ведомого, вход ведущего.
MOSI-Master Out, SlaveIn
•Стандартный периферийный порт микроконтроллеров
•Подключение внешних устройств с невысокой скоростью обмена
•Для чтения
•Стандартный периферийный порт микроконтроллеров
•Подключение внешних устройств с невысокой скоростью обмена
•Для чтения
SPI - популярный интерфейс для последовательного обмена данными между микросхемами. Интерфейс
SPI - популярный интерфейс для последовательного обмена данными между микросхемами. Интерфейс
Шина SPI организована по принципу 'ведущий-подчиненный'. В качестве ведущего шины обычно
Шина SPI организована по принципу 'ведущий-подчиненный'. В качестве ведущего шины обычно

Простейшее подключение к шине SPI
Самое простое подключение, в котором участвуют
Простейшее подключение к шине SPI
Самое простое подключение, в котором участвуют
При необходимости подключения к шине SPI нескольких микросхем используется либо независимое
При необходимости подключения к шине SPI нескольких микросхем используется либо независимое
КОП(GPIB)–канал общего пользования (General-Purpose Interface bus)
•== ГОСТ 26.003-80 («Система интерфейса для
КОП(GPIB)–канал общего пользования (General-Purpose Interface bus)
•== ГОСТ 26.003-80 («Система интерфейса для
•Не более 15 устройств одновременно на шине, включено не менее 2/3
•Не более 15 устройств одновременно на шине, включено не менее 2/3
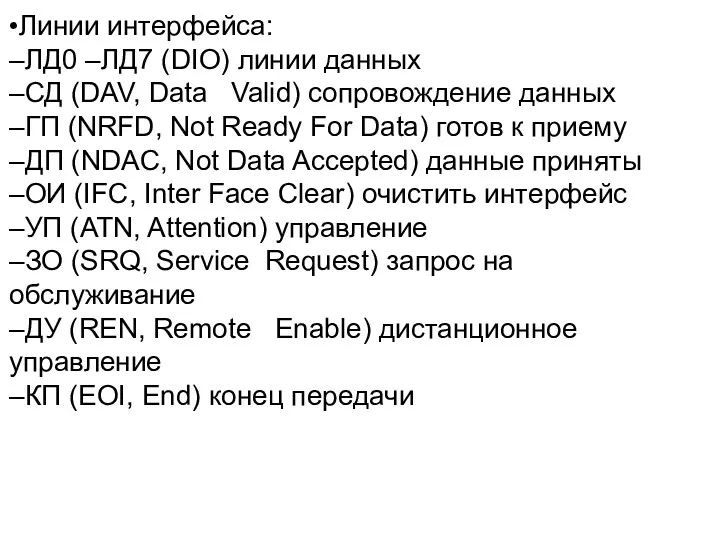
•Линии интерфейса:
–ЛД0 –ЛД7 (DIO) линии данных
–СД (DAV, Data Valid) сопровождение данных
–ГП
•Линии интерфейса:
–ЛД0 –ЛД7 (DIO) линии данных
–СД (DAV, Data Valid) сопровождение данных
–ГП
•Все сообщения через КОП подразделяются на:
–Интерфейсные сообщения
–Сообщения устройств
•19 групп команд
•Исчерпывающий контроль
•Все сообщения через КОП подразделяются на:
–Интерфейсные сообщения
–Сообщения устройств
•19 групп команд
•Исчерпывающий контроль
•Приборы имеют собственные наборы команд, которые должны быть переданы в обычном
•Приборы имеют собственные наборы команд, которые должны быть переданы в обычном
CAN (Controller Area Network)
•Интерфейс с высокой надежностью, ориентированный на применение в
CAN (Controller Area Network)
•Интерфейс с высокой надежностью, ориентированный на применение в
CAN (Control Area Network) - последовательная магистраль, обеспечивающая увязку в сеть
CAN (Control Area Network) - последовательная магистраль, обеспечивающая увязку в сеть
 Курс по выбору Экспертиза продуктов питания
Курс по выбору Экспертиза продуктов питания Ценностное предложение
Ценностное предложение Оқушылар арасындағы құқық бұзушылықтың алдын алу жұмыстарын жоспарлау, оның нақты бағыттарын айқындау
Оқушылар арасындағы құқық бұзушылықтың алдын алу жұмыстарын жоспарлау, оның нақты бағыттарын айқындау Решение и обсуждение проблемных ситуаций с педагогами
Решение и обсуждение проблемных ситуаций с педагогами ПАО МК Азовсталь. Снижение расхода коксового газа в КПЦ
ПАО МК Азовсталь. Снижение расхода коксового газа в КПЦ Закони і формули в астрономії
Закони і формули в астрономії Массаж по Дьяковой Е.А.
Массаж по Дьяковой Е.А. 20231111_kvn_7-8_kl
20231111_kvn_7-8_kl Обстоятельства, исключающие преступность деяния
Обстоятельства, исключающие преступность деяния Поэма А.С. Пушкина Медный всадник, ее нравственно-философская глубина и художественное своеобразие
Поэма А.С. Пушкина Медный всадник, ее нравственно-философская глубина и художественное своеобразие Формирование информационно-технологической структуры процессов строительной площадки (ИТС ПСП)
Формирование информационно-технологической структуры процессов строительной площадки (ИТС ПСП) Однокристальный микроЭВМ серии КР1816
Однокристальный микроЭВМ серии КР1816 Обеспечение санитарно-эпидемиологического благополучия населения
Обеспечение санитарно-эпидемиологического благополучия населения Болезни иммунной системы. Гиперчувствительность
Болезни иммунной системы. Гиперчувствительность 20231002_issledovatelskaya_rabota_kursovaya
20231002_issledovatelskaya_rabota_kursovaya Аварии на химически опасных объектах и их возможные последствия
Аварии на химически опасных объектах и их возможные последствия Презентация к проекту Развитие музыкального мышления учащихся ДШИ на примере кантиленных пьес.
Презентация к проекту Развитие музыкального мышления учащихся ДШИ на примере кантиленных пьес. Конфликты и моббинг. Виды конфликтных ситуаций
Конфликты и моббинг. Виды конфликтных ситуаций Военно-промышленный комплекс России
Военно-промышленный комплекс России Проект паллиативная помощь в Свердловской области
Проект паллиативная помощь в Свердловской области Коррекционная работа с детьми дошкольного возраста с ДЦП
Коррекционная работа с детьми дошкольного возраста с ДЦП Архитектура компьютеров
Архитектура компьютеров Ваша личная бизнес-модель профессионального развития
Ваша личная бизнес-модель профессионального развития Открытая on-line платформа для фитнес клубов и их клиентов
Открытая on-line платформа для фитнес клубов и их клиентов Культура и этнос. Роль культуры в этнической самоидентификации
Культура и этнос. Роль культуры в этнической самоидентификации Анализ диаграмм состояния двойных систем
Анализ диаграмм состояния двойных систем 57 стилей для ударной установки с аккомпаниментом бас-гитары
57 стилей для ударной установки с аккомпаниментом бас-гитары Презентация для проведения родительского собрания по теме: Особенности ГИА и ЕГЭ в 2012-2013 учебном году. Работа создана Барбашовой Натальей Алексеевной учителем географии и экономики МКОУ СОШ № 251 г. Фокино
Презентация для проведения родительского собрания по теме: Особенности ГИА и ЕГЭ в 2012-2013 учебном году. Работа создана Барбашовой Натальей Алексеевной учителем географии и экономики МКОУ СОШ № 251 г. Фокино