- Исследование движения конвертоплана с центральным управляемым вектором тяги

Содержание
- 2. Содержание работы Актуальность работы; Обзор в области летающих аппаратов с переменным вектором тяги; Математическая модель конвертоплана
- 3. Состояние исследований летающих роботов с переменным вектором тяги Пентакоптер: (RC VTOL) AL-102 TK "REGION ANGEL" Трикоптер:
- 4. Описание исследуемого объекта с переменным вектором тяги типа Общая модель конвертоплана с переменным вектором тяги состоит
- 5. Целью исследований является разработка теоретических основ и инструментальных средств проектирования конвертопланов типа трикоптер. Для достижения поставленной
- 6. Математическая модель ОXYZ - неподвижная система координат; СX1Y1Z1- подвижной системы координат; F1z F2,F3,F4 ⏐⏐ CZ -
- 7. Векторы сил тяги в подвижной системе координат: где Силы, приложенные к конвертоплану Векторы сил тяги в
- 8. Моделирование движения летающего робота относительно центра масс Теорема об изменении кинетического момента механической системы: где: -
- 9. Определение кинетического момента Тензоры инерции корпуса IC и i-го ротора Ii : Тогда кинетический момент корпуса
- 10. Определение кинетического момента Момент количества движения рассматриваемой механической системы: Подставляя в в уравнение об изменении кинетического
- 11. Система дифференциальных уравнений, описывающих движение робота: где
- 12. Общая структурная схема многоконтурной САУ
- 13. Развернутая схема многоконтурной САУ Ui – управляющие напряжения питания (i=1-6); А – акселерометр, М – магнитометр;
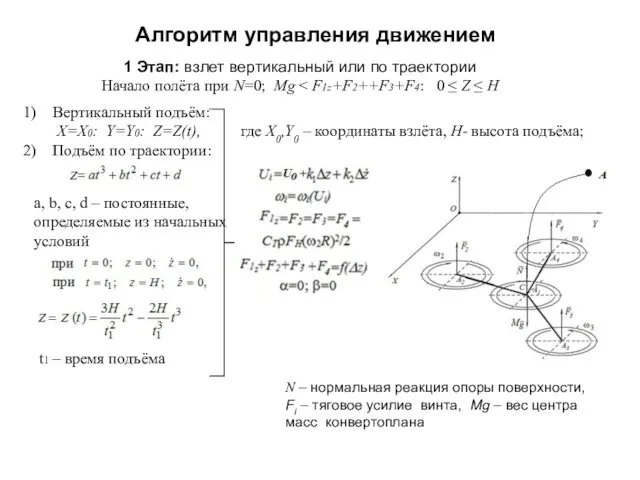
- 14. Алгоритм управления движением N – нормальная реакция опоры поверхности, Fi – тяговое усилие винта, Мg –
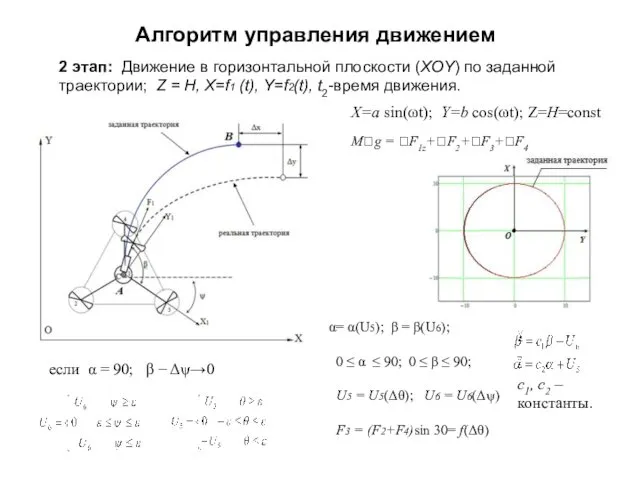
- 15. Алгоритм управления движением 2 этап: Движение в горизонтальной плоскости (XOY) по заданной траектории; Z = H,
- 16. Циклограмма управляющих воздействий на различных режимах движения
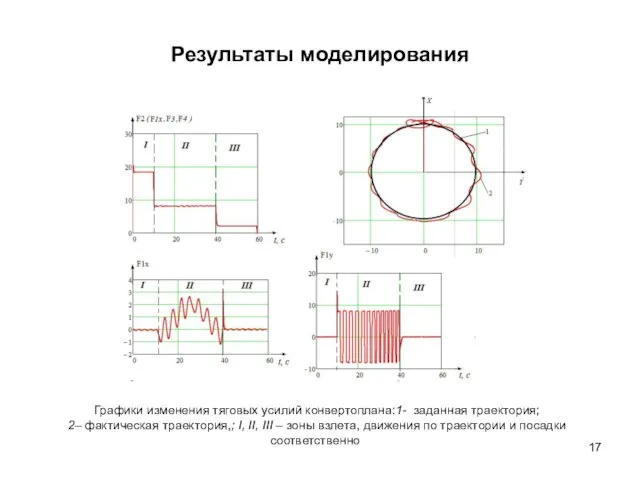
- 17. Результаты моделирования Графики изменения тяговых усилий конвертоплана:1- заданная траектория; 2– фактическая траектория,; I, II, III –
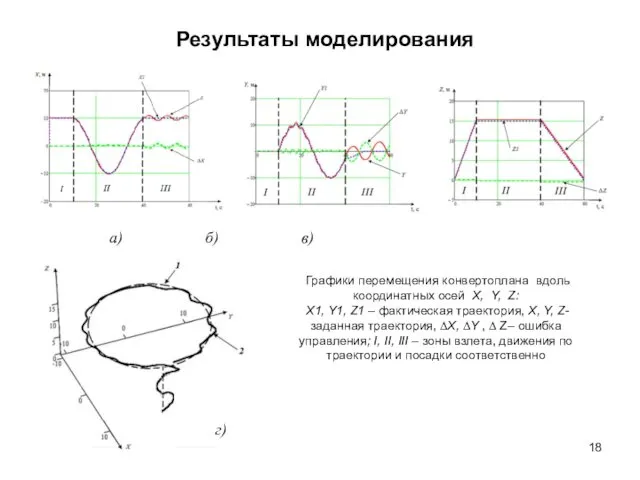
- 18. Результаты моделирования Графики перемещения конвертоплана вдоль координатных осей X, Y, Z: X1, Y1, Z1 – фактическая
- 19. Выводы Предложена расчетная схема и математическая модель пространственного движения конвертоплана с центрально расположенным регулируемым приводом, учитывающая
- 21. Скачать презентацию
Содержание работы
Актуальность работы;
Обзор в области летающих аппаратов с переменным вектором тяги;
Математическая
Содержание работы
Актуальность работы;
Обзор в области летающих аппаратов с переменным вектором тяги;
Математическая

Состояние исследований летающих роботов с переменным вектором тяги
Пентакоптер: (RC VTOL) AL-102
Состояние исследований летающих роботов с переменным вектором тяги
Пентакоптер: (RC VTOL) AL-102
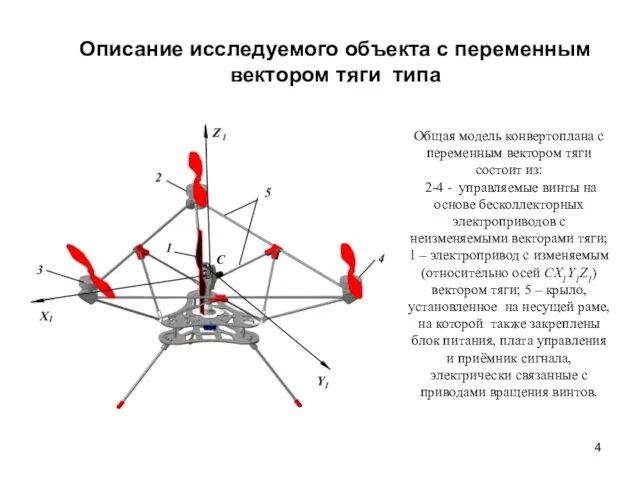
Описание исследуемого объекта с переменным вектором тяги типа
Общая модель конвертоплана с
Описание исследуемого объекта с переменным вектором тяги типа
Общая модель конвертоплана с
Целью исследований является разработка теоретических основ и инструментальных средств проектирования конвертопланов
Целью исследований является разработка теоретических основ и инструментальных средств проектирования конвертопланов
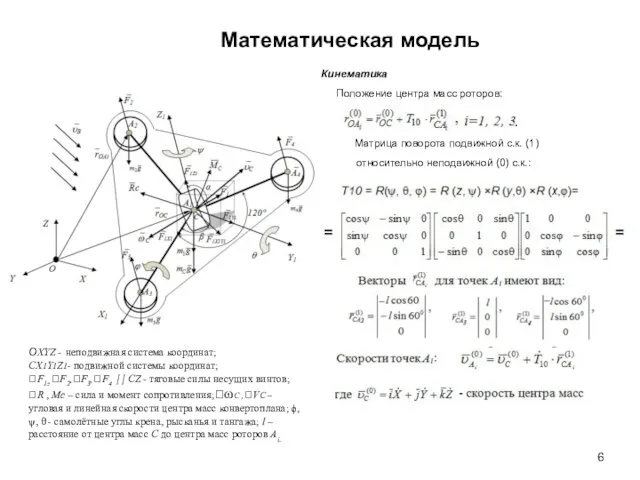
Математическая модель
ОXYZ - неподвижная система координат;
СX1Y1Z1- подвижной системы координат;
F1z F2,F3,F4 ⏐⏐
Математическая модель
ОXYZ - неподвижная система координат;
СX1Y1Z1- подвижной системы координат;
F1z F2,F3,F4 ⏐⏐
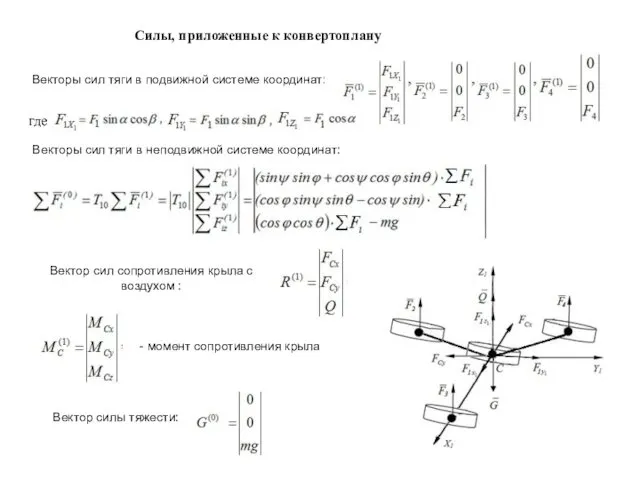
Векторы сил тяги в подвижной системе координат:
где
Силы, приложенные к конвертоплану
Векторы сил
Векторы сил тяги в подвижной системе координат:
где
Силы, приложенные к конвертоплану
Векторы сил
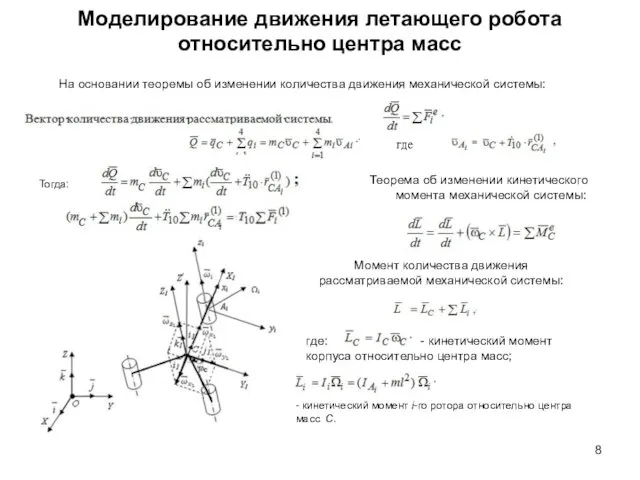
Моделирование движения летающего робота относительно центра масс
Теорема об изменении кинетического момента
Моделирование движения летающего робота относительно центра масс
Теорема об изменении кинетического момента
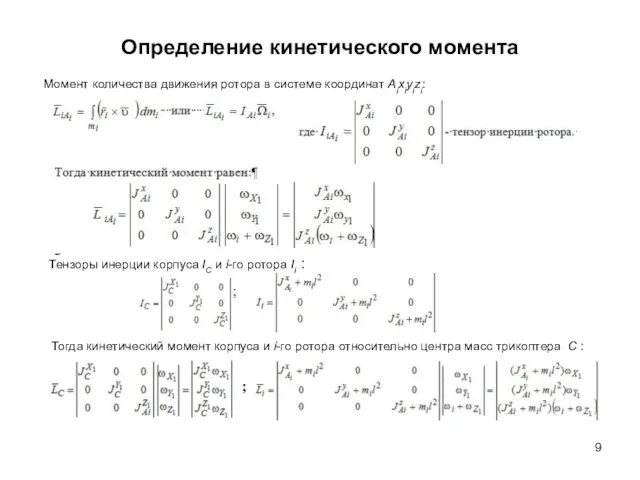
Определение кинетического момента
Тензоры инерции корпуса IC и i-го ротора Ii :
Тогда
Определение кинетического момента
Тензоры инерции корпуса IC и i-го ротора Ii :
Тогда
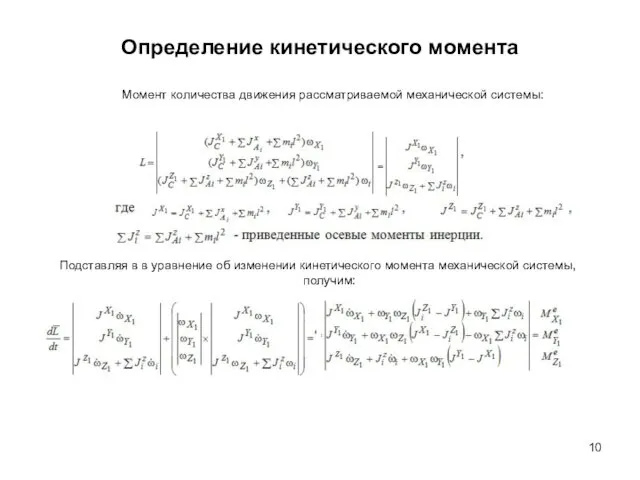
Определение кинетического момента
Момент количества движения рассматриваемой механической системы:
Подставляя в в уравнение
Определение кинетического момента
Момент количества движения рассматриваемой механической системы:
Подставляя в в уравнение
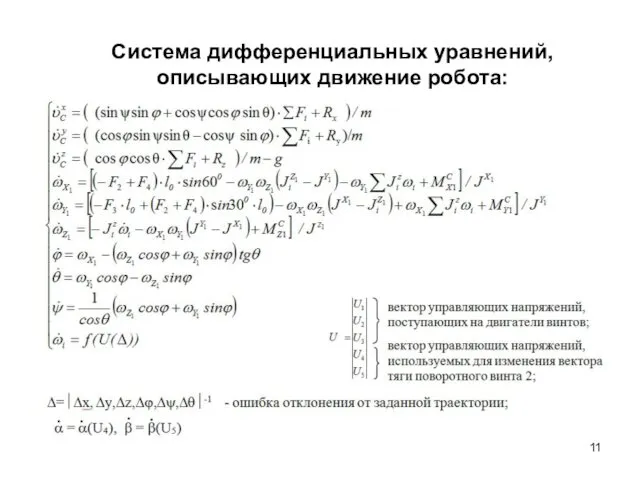
Система дифференциальных уравнений, описывающих движение робота:
где
Система дифференциальных уравнений, описывающих движение робота:
где

Общая структурная схема многоконтурной САУ
Общая структурная схема многоконтурной САУ
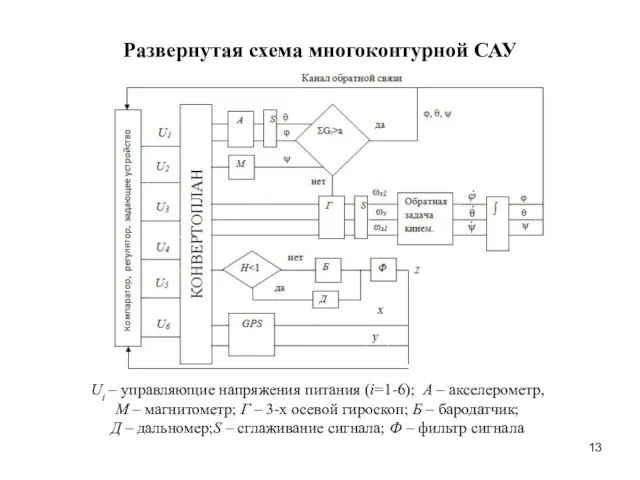
Развернутая схема многоконтурной САУ
Ui – управляющие напряжения питания (i=1-6); А –
Развернутая схема многоконтурной САУ
Ui – управляющие напряжения питания (i=1-6); А –
Алгоритм управления движением
N – нормальная реакция опоры поверхности, Fi – тяговое
Алгоритм управления движением
N – нормальная реакция опоры поверхности, Fi – тяговое
Алгоритм управления движением
2 этап: Движение в горизонтальной плоскости (XOY) по заданной
Алгоритм управления движением
2 этап: Движение в горизонтальной плоскости (XOY) по заданной
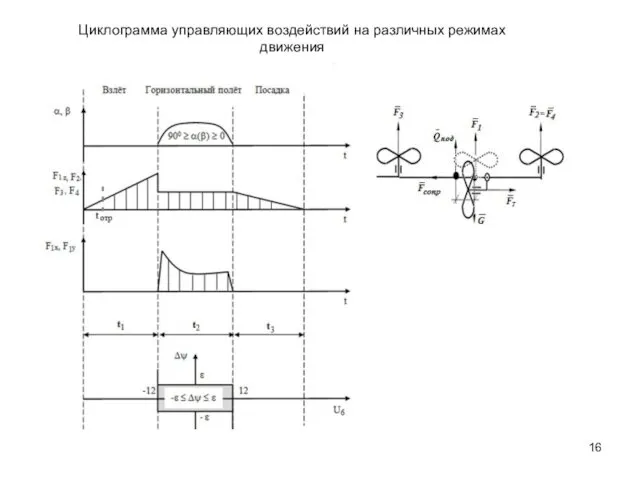
Циклограмма управляющих воздействий на различных режимах движения
Циклограмма управляющих воздействий на различных режимах движения
Результаты моделирования
Графики изменения тяговых усилий конвертоплана:1- заданная траектория;
2– фактическая
Результаты моделирования
Графики изменения тяговых усилий конвертоплана:1- заданная траектория;
2– фактическая
Результаты моделирования
Графики перемещения конвертоплана вдоль координатных осей X, Y, Z:
Результаты моделирования
Графики перемещения конвертоплана вдоль координатных осей X, Y, Z:
Выводы
Предложена расчетная схема и математическая модель пространственного движения конвертоплана с центрально
Выводы
Предложена расчетная схема и математическая модель пространственного движения конвертоплана с центрально
 Страны мира
Страны мира Международный день отказа от курения
Международный день отказа от курения Ценностное предложение
Ценностное предложение Состав и задачи путевого хозяйства. Показатели и особенности работы путевого хозяйства железных дорог РФ (лекция 1)
Состав и задачи путевого хозяйства. Показатели и особенности работы путевого хозяйства железных дорог РФ (лекция 1) Ароматические углеводороды
Ароматические углеводороды Безопасность детей в сети Интернет
Безопасность детей в сети Интернет Особенности перевода русской души
Особенности перевода русской души Основы религиозных культур и светской этики
Основы религиозных культур и светской этики Здоровьесберегающие технологии в педагогическом процессе ДОУ
Здоровьесберегающие технологии в педагогическом процессе ДОУ Способы определения запаса насаждения. Перечет деревьев
Способы определения запаса насаждения. Перечет деревьев Идентификация банком клиента, представителя клиента, выгодоприобретателя
Идентификация банком клиента, представителя клиента, выгодоприобретателя экологическая акция Живи родник
экологическая акция Живи родник Шунты и их виды
Шунты и их виды Органы дыхания и дыхательной системы
Органы дыхания и дыхательной системы Комп’ютерні мережі. Локальна мережа. Використання мережевих папок
Комп’ютерні мережі. Локальна мережа. Використання мережевих папок Гидроэлектростанции (ГЭС)
Гидроэлектростанции (ГЭС) Портфолио объединения ЛИДЕР
Портфолио объединения ЛИДЕР 20191120_11viktorina_znaesh_li_ty_krym
20191120_11viktorina_znaesh_li_ty_krym Алканы, алкены, алкины
Алканы, алкены, алкины Точение. Отрезка и обработка канавок
Точение. Отрезка и обработка канавок Буддизм в России
Буддизм в России История движения Российских Студенческих отрядов
История движения Российских Студенческих отрядов День защитника Отечества
День защитника Отечества Приемы компрессии (сжатия) на примере текста Как раньше взрослели
Приемы компрессии (сжатия) на примере текста Как раньше взрослели Портфоліо Котюка Олександра Івановича
Портфоліо Котюка Олександра Івановича Социальная адаптивность - успешный ребенок- успешный гражданин!
Социальная адаптивность - успешный ребенок- успешный гражданин! 23 февраля
23 февраля Выполнение штукатурных работ
Выполнение штукатурных работ