- Кинематика и динамика точки

Содержание
- 2. 2 Иммануи́л Кант 1724-1804, Кёнигсберг
- 3. 3
- 4. 1.1.2. Курс ТМ включает 4 Кинематика Динамика отвечает на основной вопрос курса – из-за чего возникает
- 5. 6.1. Введение в кинематику точки
- 6. 6.1.1. Задачи кинематики 2.1. ОПРЕДЕЛЕНИЕ ССС 6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ 5 Кинематика – это раздел
- 7. 6.1.2. Относительность движения 2.1. ОПРЕДЕЛЕНИЕ ССС 6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ 6 В системе отсчета обходчика
- 8. 6.1.3. Пространство и время 2.1. ОПРЕДЕЛЕНИЕ ССС 6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ 7 Постулируется существование не
- 9. 6.2. Способы задания движения точки
- 10. j ВЕКТОРНЫЙ СПОСОБ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. z y x k i М 6.2.1. Векторный и координатный
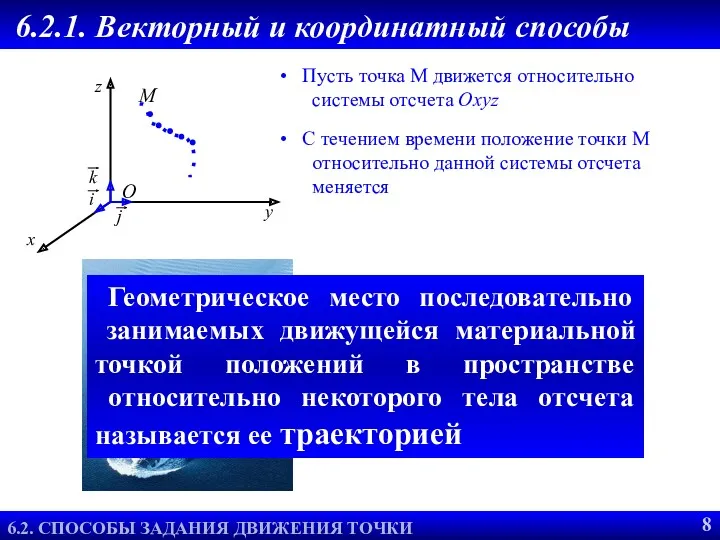
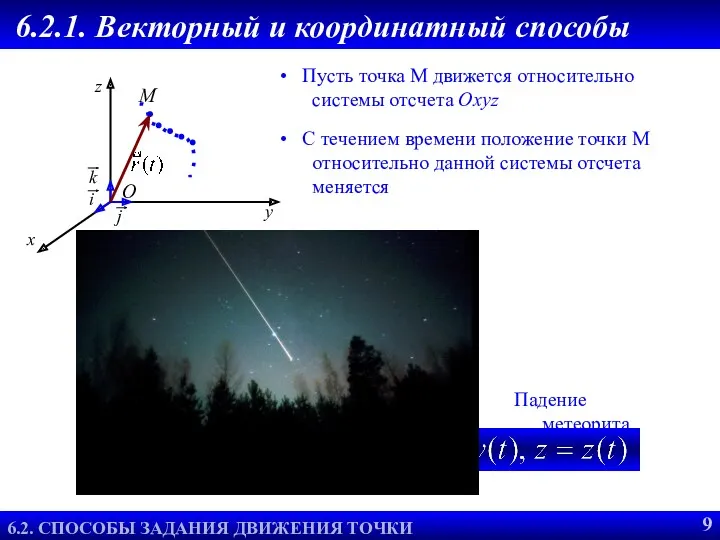
- 11. ВЕКТОРНЫЙ СПОСОБ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. 6.2.1. Векторный и координатный способы Пусть точка М движется относительно системы
- 12. 6.3. Скорость точки
- 13. 6.3.1. Апории Зенона Догонит ли Ахиллес черепаху? Как охарактеризовать движение различных тел, преодолевающих равные отрезки за
- 14. 11 Зенон Элейский V век до н.э.
- 15. 6.3.2. Векторный способ задания скорости Рассмотрим движение точки М вдоль траектории M(t) r(t) ΔS Пройденный путь
- 16. 6.3.3. Координатный способ задания скорости Чтобы найти проекции скорости, продифференцируем радиус- вектор точки
- 17. 6.4.1. Векторный способ задания ускорения Как определить быстроту изменения скорости точки? Пусть материальная точка М движется
- 18. 6.4.2. Координатный способ задания ускорения Чтобы получить выражение ускорения при координатном способе задания движения точки, выразим
- 19. 6.5. Аксиомы динамики
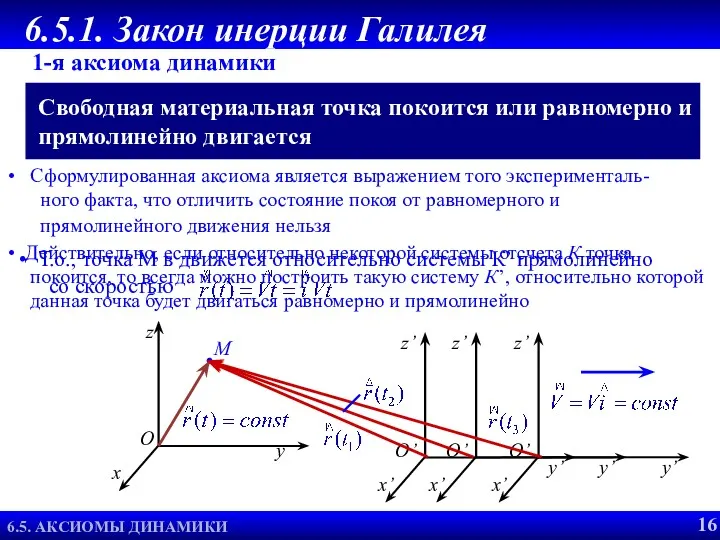
- 20. 6.5.1. Закон инерции Галилея 2.1. ОПРЕДЕЛЕНИЕ ССС 6.5. АКСИОМЫ ДИНАМИКИ 16 M Сформулированная аксиома является выражением
- 21. 6.5.2. Принцип относительности Галилея 2.1. ОПРЕДЕЛЕНИЕ ССС 6.5. АКСИОМЫ ДИНАМИКИ 17 Системы отсчета, относительно которых свободная
- 22. 6.5.4 Второй закон Ньютона Аксиома 2 Если в некоторой инерциальной системе отсчета на свободную материальную точку
- 23. 6.5.6. Третий закон Ньютона Аксиома 3 Две материальные точки действуют друг на друга с силами, равными
- 24. Исаак Ньютон, 1642-1727, Вулсторн-Кембридж-Лондон 20
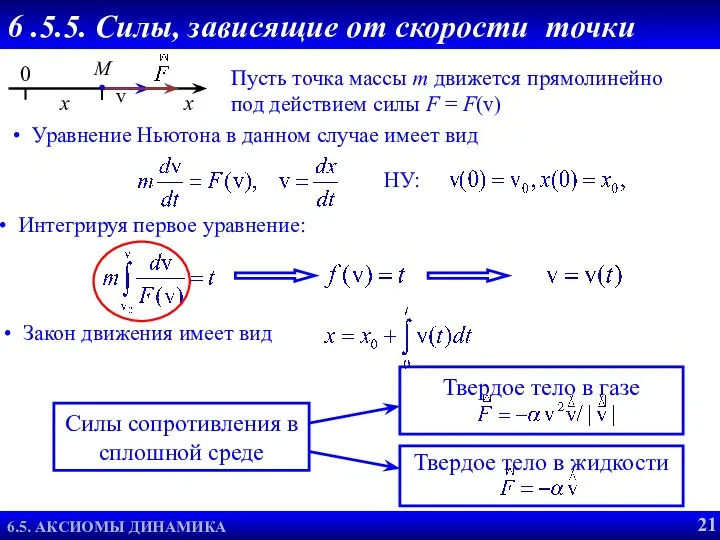
- 25. Твердое тело в жидкости Пусть точка массы m движется прямолинейно под действием силы F = F(v)
- 26. Материальная точка массы m, двигающаяся прямолинейно с постоянной скоростью v, попадает в вязкую жидкость, где на
- 27. “Согласно опытно установленному факту не существует никакого физически обнаруживаемого состояния движения, которое можно было бы назвать
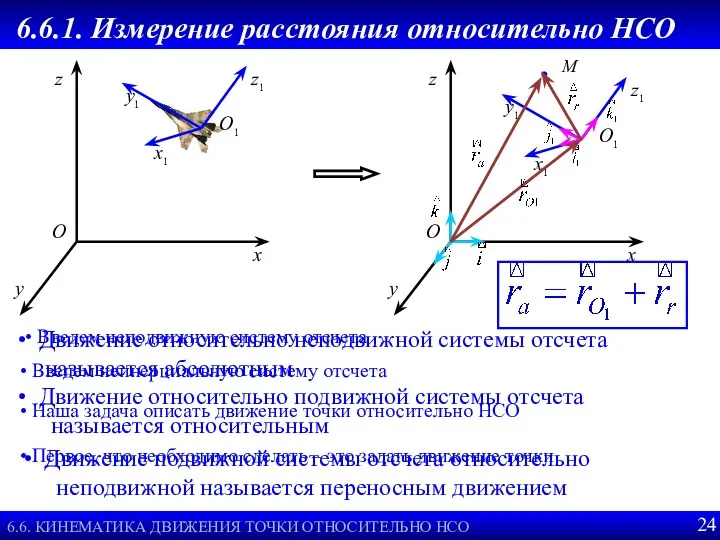
- 28. СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ 6.6.1. Измерение расстояния относительно НСО 2.1. ОПРЕДЕЛЕНИЕ ССС 6.6. КИНЕМАТИКА ДВИЖЕНИЯ ТОЧКИ ОТНОСИТЕЛЬНО
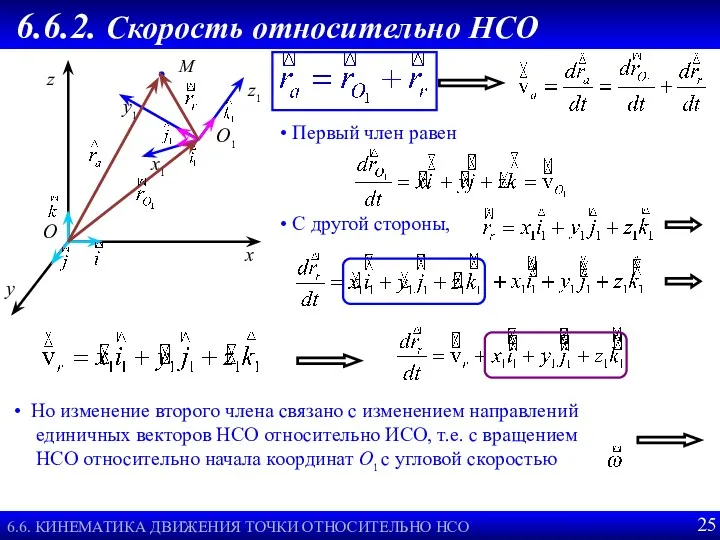
- 29. СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ 6.6.2. Скорость относительно НСО 2.1. ОПРЕДЕЛЕНИЕ ССС 6.6. КИНЕМАТИКА ДВИЖЕНИЯ ТОЧКИ ОТНОСИТЕЛЬНО НСО
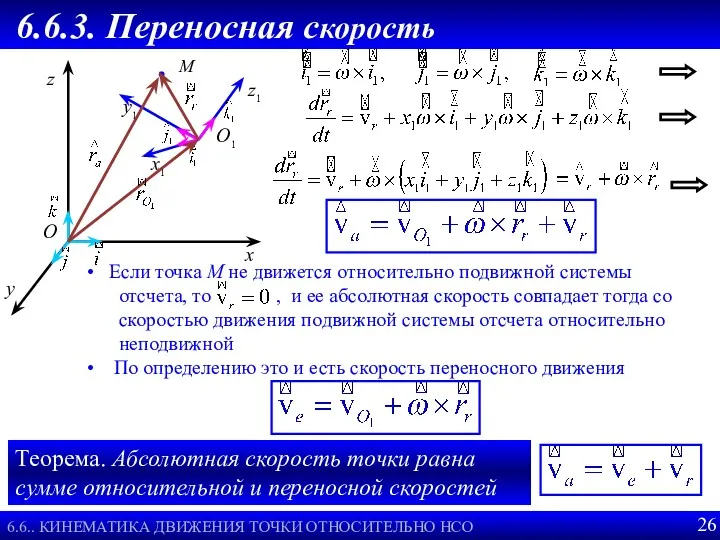
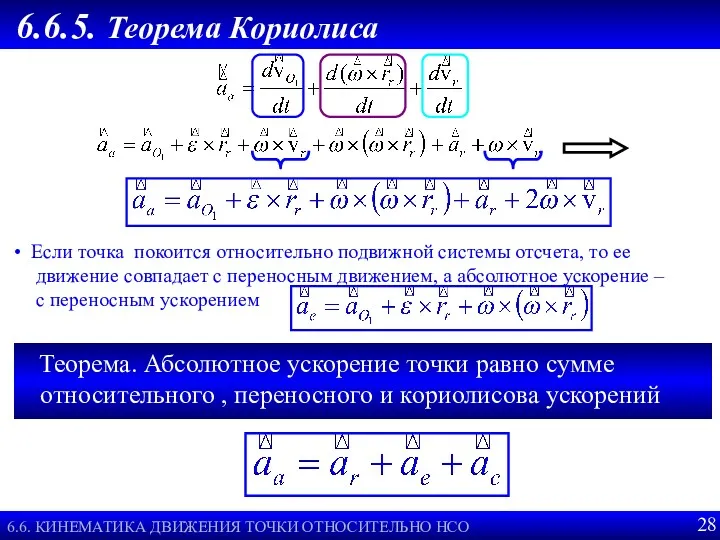
- 30. Если точка М не движется относительно подвижной системы отсчета, то , и ее абсолютная скорость совпадает
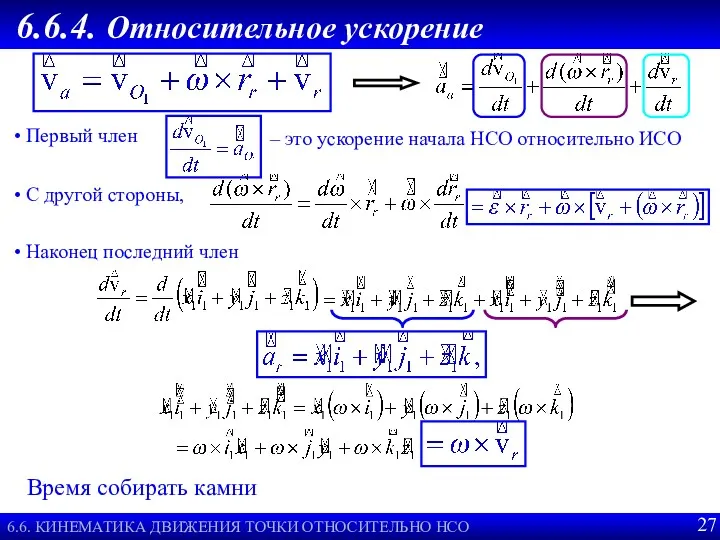
- 31. СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ 6.6.4. Относительное ускорение 2.1. ОПРЕДЕЛЕНИЕ ССС 6.6. КИНЕМАТИКА ДВИЖЕНИЯ ТОЧКИ ОТНОСИТЕЛЬНО НСО 27
- 32. СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ 6.6.5. Теорема Кориолиса 2.1. ОПРЕДЕЛЕНИЕ ССС 6.6. КИНЕМАТИКА ДВИЖЕНИЯ ТОЧКИ ОТНОСИТЕЛЬНО НСО 28
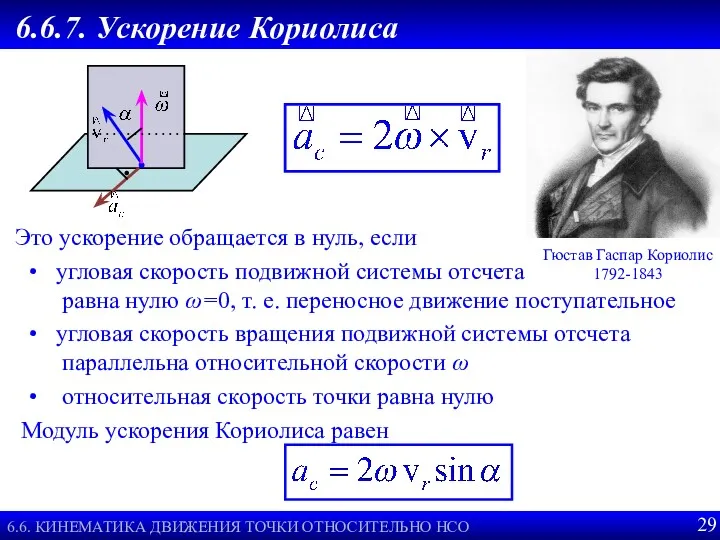
- 33. СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ 6.6.7. Ускорение Кориолиса 2.1. ОПРЕДЕЛЕНИЕ ССС 6.6. КИНЕМАТИКА ДВИЖЕНИЯ ТОЧКИ ОТНОСИТЕЛЬНО НСО 29
- 34. 6.7. УРАВНЕНИЕ НЬЮТОНА ОТНОСИТЕЛЬНО НСО
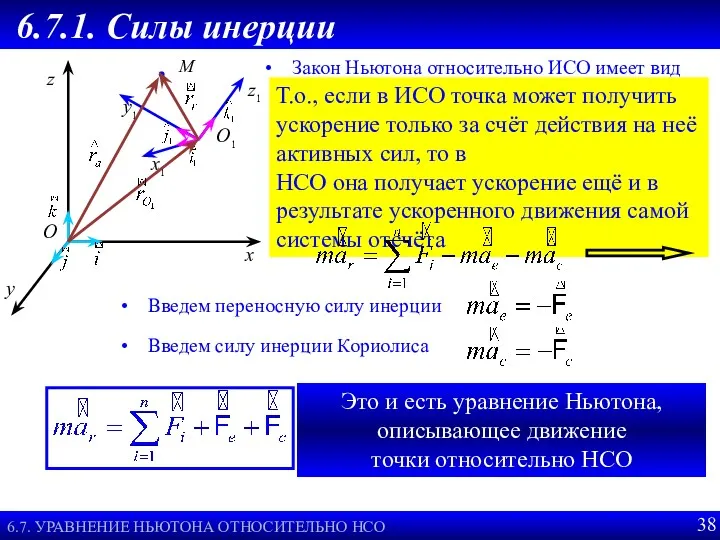
- 35. Закон Ньютона относительно ИСО имеет вид СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ 6.7.1. Силы инерции 2.1. ОПРЕДЕЛЕНИЕ ССС 6.7.
- 36. 6.7.2. Природа сил инерции Обычные силы являются результатом взаимодействия тел между собой Они определяются соответствующими физическими
- 37. Бэр Карл Максимович 1792-1876 6.7.3. Закон Бэра Пусть тело (точка) движется по поверхности Земли в северном
- 38. 6.8. НЕВЕСОМОСТЬ
- 39. 6.8.1.Что такое вес? Относительно ИСО Условие невесомости Относительно НСО
- 40. 6.8.2. Когда же космонавты будут невесомыми?
- 41. 6.8.3. Невесомость на орбите Условие невесомости Сила инерции равна Пусть сила тяжести
- 43. Скачать презентацию
2
Иммануи́л Кант
1724-1804, Кёнигсберг
2
Иммануи́л Кант
1724-1804, Кёнигсберг

3
3
1.1.2. Курс ТМ включает
4
Кинематика
Динамика отвечает на основной вопрос курса
1.1.2. Курс ТМ включает
4
Кинематика
Динамика отвечает на основной вопрос курса
6.1. Введение в кинематику точки
6.1. Введение в кинематику точки
6.1.1. Задачи кинематики
2.1. ОПРЕДЕЛЕНИЕ ССС
6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ
5
Кинематика
6.1.1. Задачи кинематики
2.1. ОПРЕДЕЛЕНИЕ ССС
6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ
5
Кинематика

6.1.2. Относительность движения
2.1. ОПРЕДЕЛЕНИЕ ССС
6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ
6
В
6.1.2. Относительность движения
2.1. ОПРЕДЕЛЕНИЕ ССС
6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ
6
В
6.1.3. Пространство и время
2.1. ОПРЕДЕЛЕНИЕ ССС
6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ
6.1.3. Пространство и время
2.1. ОПРЕДЕЛЕНИЕ ССС
6.1. ВВЕДЕНИЕ В КИНЕМАТИКУ ТОЧКИ
6.2. Способы задания движения точки
6.2. Способы задания движения точки
j
ВЕКТОРНЫЙ СПОСОБ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ.
z
y
x
k
i
М
6.2.1. Векторный и координатный способы
Пусть точка
j
ВЕКТОРНЫЙ СПОСОБ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ.
z
y
x
k
i
М
6.2.1. Векторный и координатный способы
Пусть точка
ВЕКТОРНЫЙ СПОСОБ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ.
6.2.1. Векторный и координатный способы
Пусть точка
ВЕКТОРНЫЙ СПОСОБ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ.
6.2.1. Векторный и координатный способы
Пусть точка
6.3. Скорость точки
6.3. Скорость точки
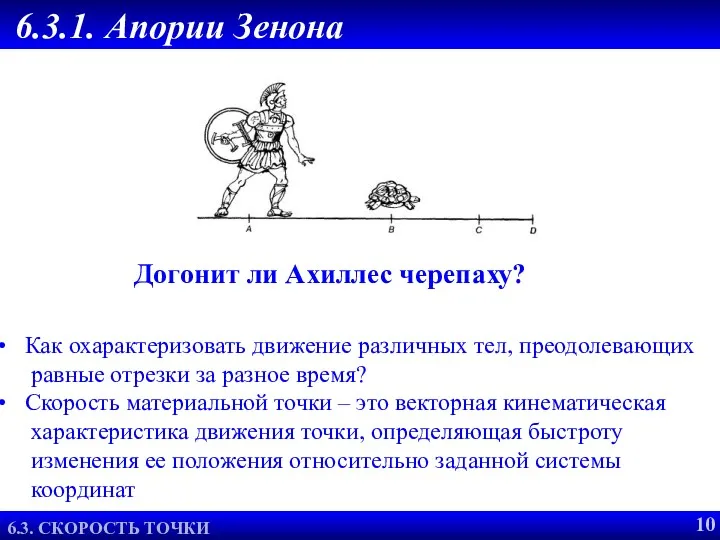
6.3.1. Апории Зенона
Догонит ли Ахиллес черепаху?
Как охарактеризовать движение различных тел,
6.3.1. Апории Зенона
Догонит ли Ахиллес черепаху?
Как охарактеризовать движение различных тел,
11
Зенон Элейский
V век до н.э.
11
Зенон Элейский
V век до н.э.
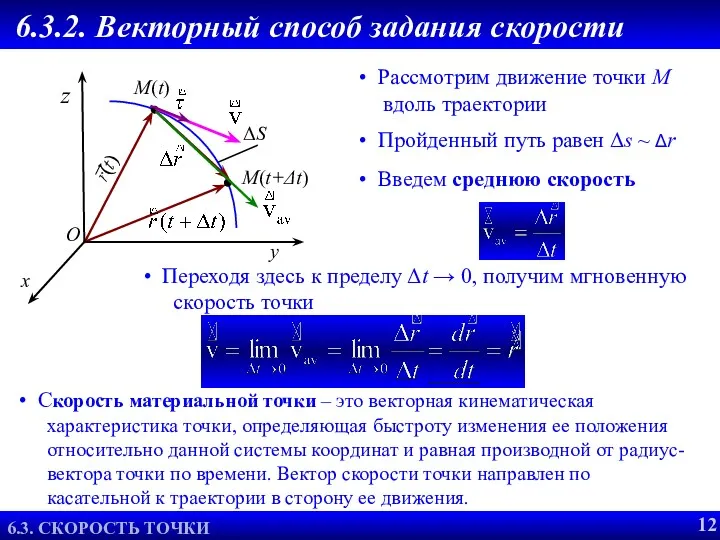
6.3.2. Векторный способ задания скорости
Рассмотрим движение точки М
вдоль
6.3.2. Векторный способ задания скорости
Рассмотрим движение точки М
вдоль
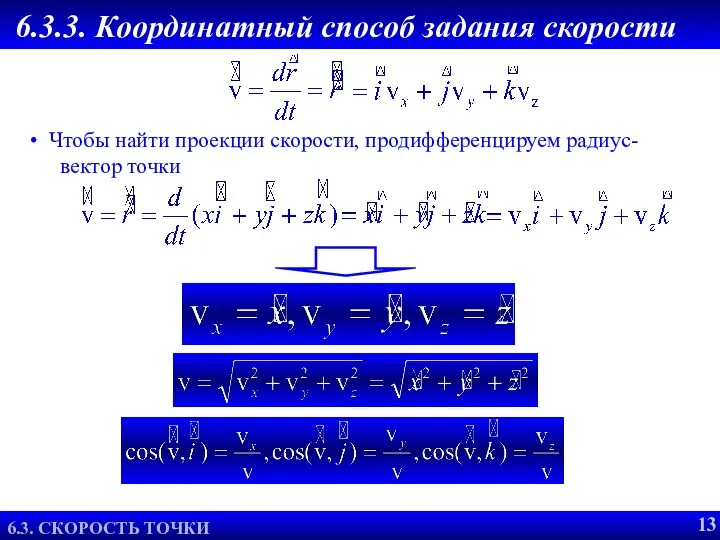
6.3.3. Координатный способ задания скорости
Чтобы найти проекции скорости, продифференцируем радиус-
6.3.3. Координатный способ задания скорости
Чтобы найти проекции скорости, продифференцируем радиус-
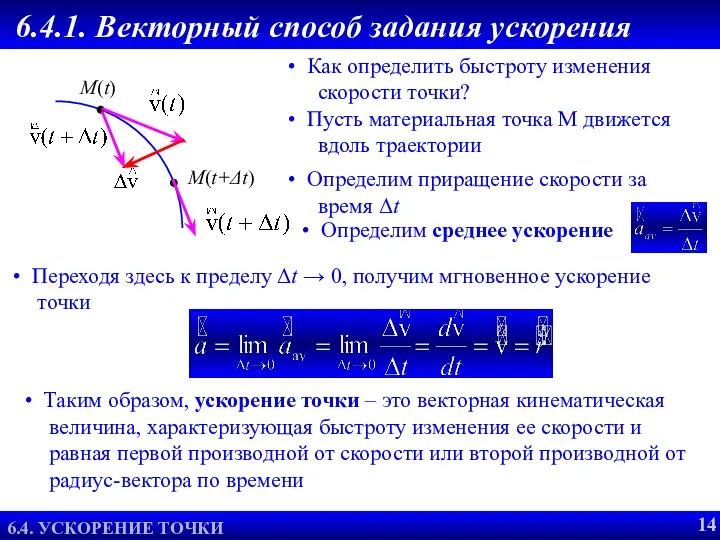
6.4.1. Векторный способ задания ускорения
Как определить быстроту изменения
скорости
6.4.1. Векторный способ задания ускорения
Как определить быстроту изменения
скорости
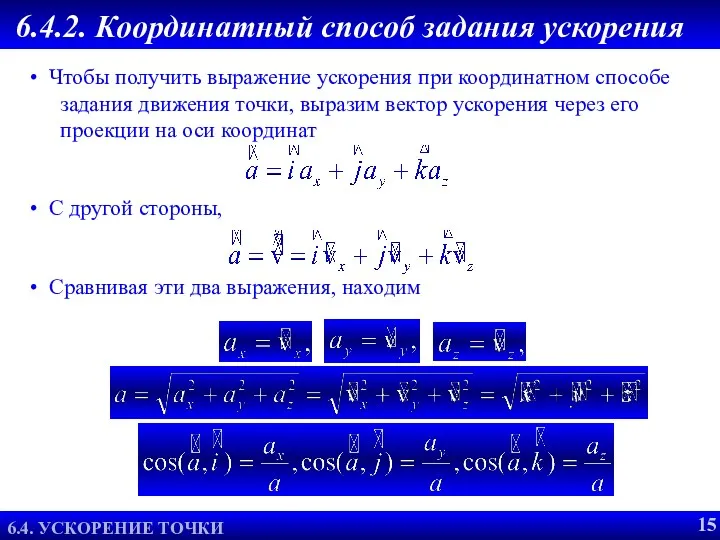
6.4.2. Координатный способ задания ускорения
Чтобы получить выражение ускорения при координатном
6.4.2. Координатный способ задания ускорения
Чтобы получить выражение ускорения при координатном
6.5. Аксиомы динамики
6.5. Аксиомы динамики
6.5.1. Закон инерции Галилея
2.1. ОПРЕДЕЛЕНИЕ ССС
6.5. АКСИОМЫ ДИНАМИКИ
16
M
6.5.1. Закон инерции Галилея
2.1. ОПРЕДЕЛЕНИЕ ССС
6.5. АКСИОМЫ ДИНАМИКИ
16
M
6.5.2. Принцип относительности Галилея
2.1. ОПРЕДЕЛЕНИЕ ССС
6.5. АКСИОМЫ ДИНАМИКИ
17
Системы отсчета,
6.5.2. Принцип относительности Галилея
2.1. ОПРЕДЕЛЕНИЕ ССС
6.5. АКСИОМЫ ДИНАМИКИ
17
Системы отсчета,
6.5.4 Второй закон Ньютона
Аксиома 2
Если в некоторой инерциальной системе отсчета
6.5.4 Второй закон Ньютона
Аксиома 2
Если в некоторой инерциальной системе отсчета
6.5.6. Третий закон Ньютона
Аксиома 3
Две материальные точки действуют друг на
6.5.6. Третий закон Ньютона
Аксиома 3
Две материальные точки действуют друг на
Исаак Ньютон,
1642-1727, Вулсторн-Кембридж-Лондон
20
Исаак Ньютон,
1642-1727, Вулсторн-Кембридж-Лондон
20
Твердое тело в жидкости
Пусть точка массы m движется прямолинейно под действием
Твердое тело в жидкости
Пусть точка массы m движется прямолинейно под действием
Материальная точка массы m, двигающаяся прямолинейно с постоянной
скоростью v, попадает в
Материальная точка массы m, двигающаяся прямолинейно с постоянной
скоростью v, попадает в
“Согласно опытно установленному факту
не существует никакого физически
обнаруживаемого состояния движения,
“Согласно опытно установленному факту
не существует никакого физически
обнаруживаемого состояния движения,
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.1. Измерение расстояния относительно НСО
2.1. ОПРЕДЕЛЕНИЕ
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.1. Измерение расстояния относительно НСО
2.1. ОПРЕДЕЛЕНИЕ
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.2. Скорость относительно НСО
2.1. ОПРЕДЕЛЕНИЕ ССС
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.2. Скорость относительно НСО
2.1. ОПРЕДЕЛЕНИЕ ССС
Если точка М не движется относительно подвижной системы
отсчета,
Если точка М не движется относительно подвижной системы
отсчета,
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.4. Относительное ускорение
2.1. ОПРЕДЕЛЕНИЕ ССС
6.6.
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.4. Относительное ускорение
2.1. ОПРЕДЕЛЕНИЕ ССС
6.6.
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.5. Теорема Кориолиса
2.1. ОПРЕДЕЛЕНИЕ ССС
6.6.
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.5. Теорема Кориолиса
2.1. ОПРЕДЕЛЕНИЕ ССС
6.6.
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.7. Ускорение Кориолиса
2.1. ОПРЕДЕЛЕНИЕ ССС
6.6.
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.6.7. Ускорение Кориолиса
2.1. ОПРЕДЕЛЕНИЕ ССС
6.6.
6.7. УРАВНЕНИЕ НЬЮТОНА ОТНОСИТЕЛЬНО НСО
6.7. УРАВНЕНИЕ НЬЮТОНА ОТНОСИТЕЛЬНО НСО
Закон Ньютона относительно ИСО имеет вид
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.7.1.
Закон Ньютона относительно ИСО имеет вид
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
6.7.1.
6.7.2. Природа сил инерции
Обычные силы являются результатом взаимодействия
тел между
6.7.2. Природа сил инерции
Обычные силы являются результатом взаимодействия
тел между
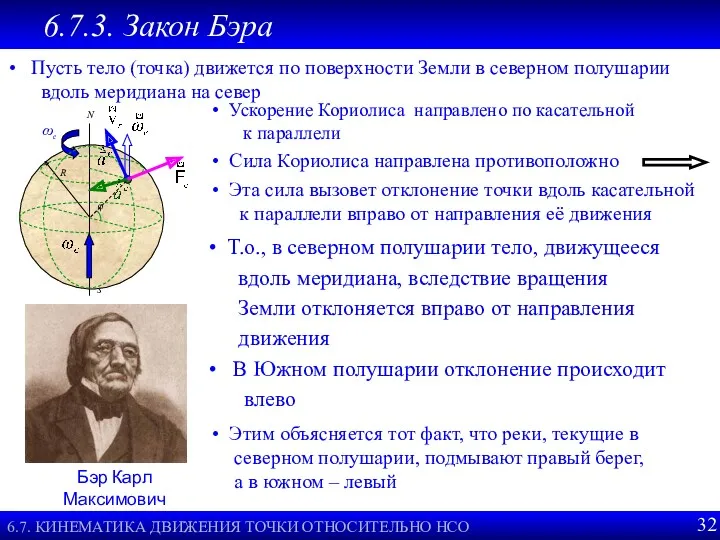
Бэр Карл Максимович
1792-1876
6.7.3. Закон Бэра
Пусть тело (точка) движется по поверхности
Бэр Карл Максимович
1792-1876
6.7.3. Закон Бэра
Пусть тело (точка) движется по поверхности
6.8. НЕВЕСОМОСТЬ
6.8. НЕВЕСОМОСТЬ
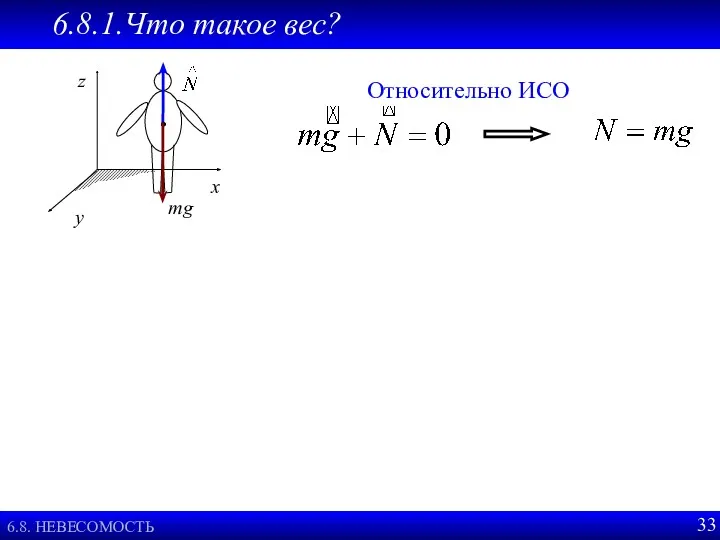
6.8.1.Что такое вес?
Относительно ИСО
Условие невесомости
Относительно НСО
6.8.1.Что такое вес?
Относительно ИСО
Условие невесомости
Относительно НСО

6.8.2. Когда же космонавты будут невесомыми?
6.8.2. Когда же космонавты будут невесомыми?
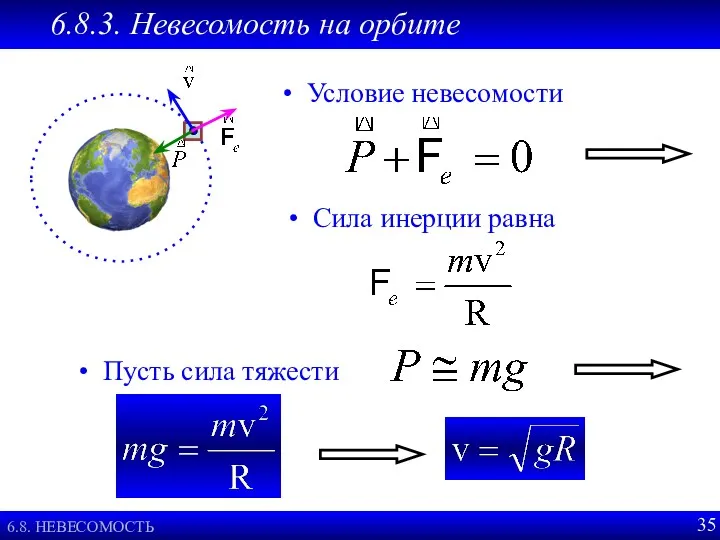
6.8.3. Невесомость на орбите
Условие невесомости
Сила инерции равна
Пусть
6.8.3. Невесомость на орбите
Условие невесомости
Сила инерции равна
Пусть
 Участники уголовного судопроизводства
Участники уголовного судопроизводства Бизнес проект кальянная Фимиам
Бизнес проект кальянная Фимиам История Дня Святого Валентина
История Дня Святого Валентина Организация погрузочно-разгрузочных работ на автотранспорте
Организация погрузочно-разгрузочных работ на автотранспорте Наукометрия и библиометрия
Наукометрия и библиометрия Город мастеров
Город мастеров Птицу видно по полету (1). История основания TESLA
Птицу видно по полету (1). История основания TESLA Иудаизм и культура
Иудаизм и культура Презентация урока Рельеф суши 6класс
Презентация урока Рельеф суши 6класс Оценка рисков для здоровья мужчин
Оценка рисков для здоровья мужчин Колорит в изобразительном искусстве
Колорит в изобразительном искусстве Методы работы с детьми с ОВЗ
Методы работы с детьми с ОВЗ Бином Ньютона
Бином Ньютона Команда развития грихастха-ашрама
Команда развития грихастха-ашрама 20231116_zadanie_8_oge
20231116_zadanie_8_oge Климат Северной Америки
Климат Северной Америки Презентация
Презентация Виды машинных швов
Виды машинных швов Простейшие тригонометрические уравнения
Простейшие тригонометрические уравнения Параллельное соединение проводников
Параллельное соединение проводников Вакуумная формовка пластика
Вакуумная формовка пластика Строение тела человека
Строение тела человека Урок Отраслевая структура хозяйства
Урок Отраслевая структура хозяйства Почему я люблю живопись
Почему я люблю живопись Танграм
Танграм Гормоны. Характерные свойства. Виды гормонов
Гормоны. Характерные свойства. Виды гормонов Робототехника. Условия в ArduBlock. Цифровые датчики
Робототехника. Условия в ArduBlock. Цифровые датчики Основные понятия теории организации (ТО)
Основные понятия теории организации (ТО)