- Конструктор LEGO Mindstorms

Содержание
- 2. Электронные компоненты конструктора
- 3. Детали конструктора
- 4. Блок программирования «Рулевое управление» Режимы работы мотора: • Включить (On) • Выключить (Off) • Включить на
- 5. Параметры режимов блока «Рулевое управление»
- 6. Три вида поворотов
- 7. Практические задания 2. Имеется линия длиной 50 см. Находясь в левом крае этой линии приводная платформа
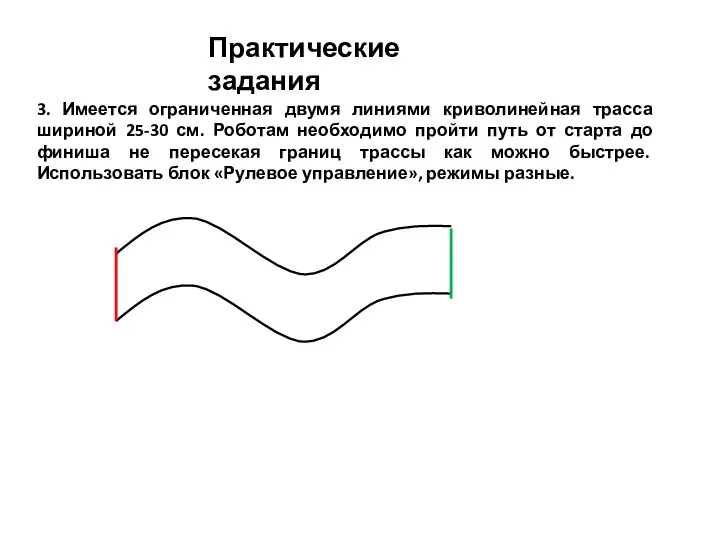
- 8. Практические задания 3. Имеется ограниченная двумя линиями криволинейная трасса шириной 25-30 см. Роботам необходимо пройти путь
- 9. Блок «Независимое управление моторами» Выбор режима Параметры Режимы работы мотора: • Включить (On) • Выключить (Off)
- 10. Блок программирования «Цикл»
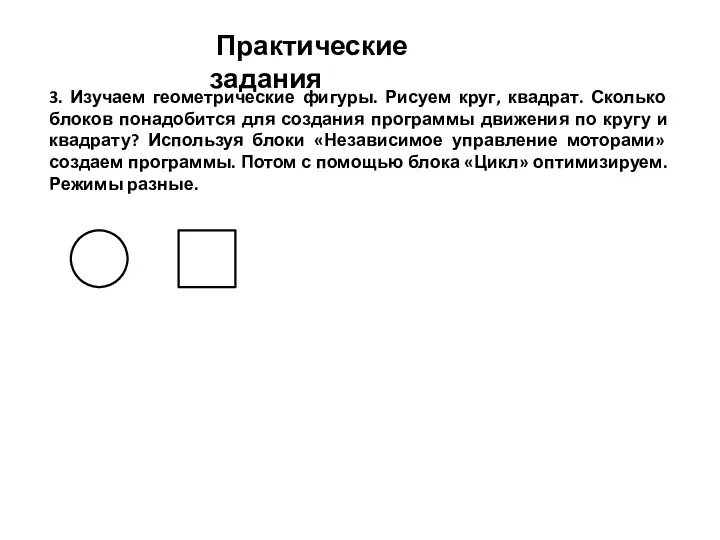
- 11. Практические задания 3. Изучаем геометрические фигуры. Рисуем круг, квадрат. Сколько блоков понадобится для создания программы движения
- 12. Блок «Звук»
- 13. Практические задания 4. С помощью блоков Звук (Sound), сделайте так, чтобы робот воспроизводил музыкальные фрагменты и
- 14. Блок «Экран»
- 15. Практические задания 5. С помощью блоков «Экран» и звук, сделайте мультик или слайдшоу.
- 16. Блок «Состояние модуля»
- 17. Практические задания 6. Создайте программу, с помощью которой робот говорил бы «Стоп», «Приготовьтесь» и «Поехали», демонстрируя
- 18. Блок «Средний мотор» Выбор режима Параметры Режимы работы мотора: • Включить (On) • Выключить (Off) •
- 19. Практические задания 8. Соберите ковш. Переместите кубик.
- 20. Датчик касания Отпущено Нажатие Щелчок Датчик касания позволяет роботу «чувствовать», определяя, нажата или отпущена в настоящий
- 21. Использование датчика касания Для определения препятствия перед роботом Достижения заданного положения механизмов робота Кнопка для включения
- 22. Практические задания 9. Запрограммируйте блок управления таким образом, чтобы при нажатии на датчик касания индикатор состояния
- 23. Практические задания 14. Изучение блока «Переключатель». Запрограммируйте робота ехать вперед три секунды. После чего он проверяет
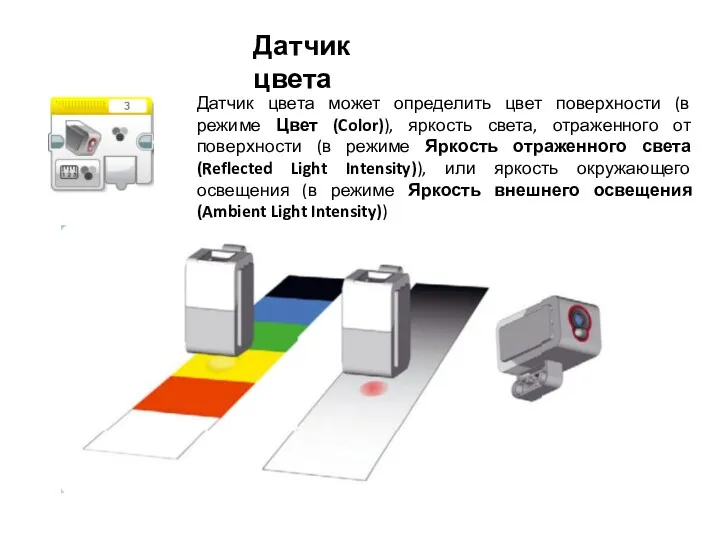
- 24. Датчик цвета Датчик цвета может определить цвет поверхности (в режиме Цвет (Color)), яркость света, отраженного от
- 25. Цветовой режим датчика цвета В этом режиме датчик может определять цвет поверхности на расстоянии до 1
- 26. Практические задания 15. Движение робота по линии. Используйте датчик цвета и блок «Переключатель» для движения робота
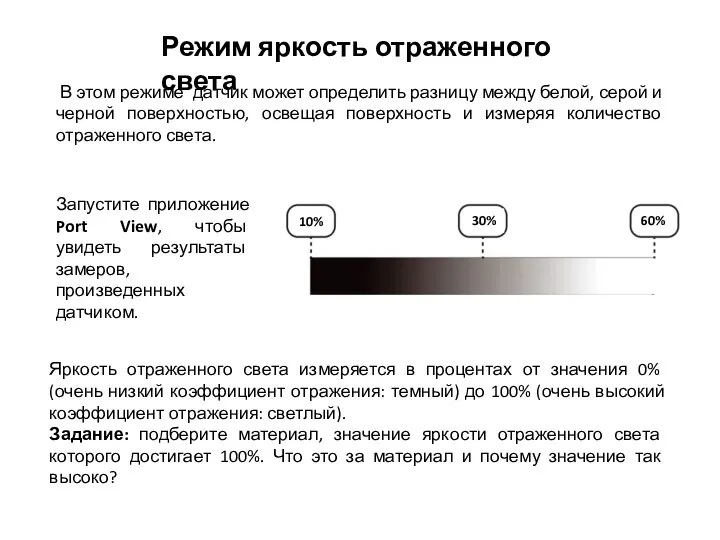
- 27. Режим яркость отраженного света В этом режиме датчик может определить разницу между белой, серой и черной
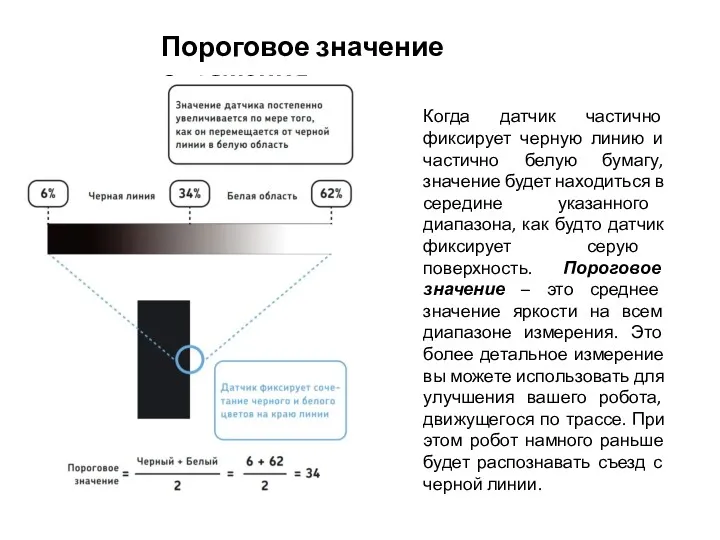
- 28. Пороговое значение отражения Когда датчик частично фиксирует черную линию и частично белую бумагу, значение будет находиться
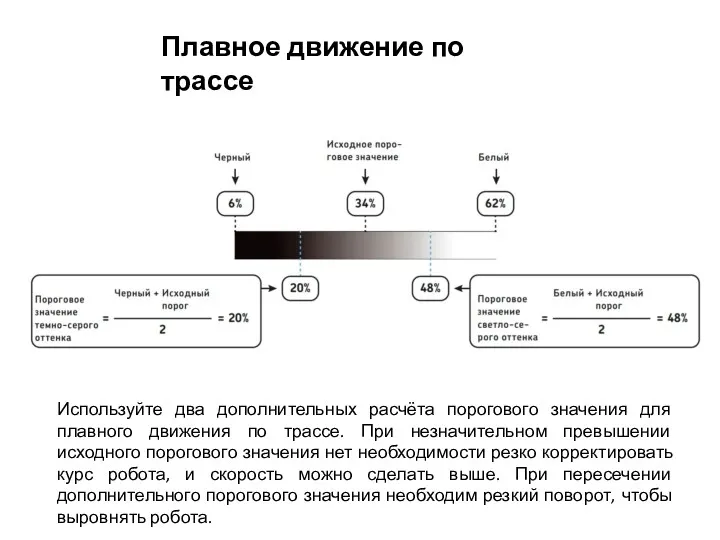
- 29. Плавное движение по трассе Используйте два дополнительных расчёта порогового значения для плавного движения по трассе. При
- 30. Практические задания 19. Создайте простейшую программу движения по черной линии с использованием режима яркости отраженного света,
- 32. Скачать презентацию
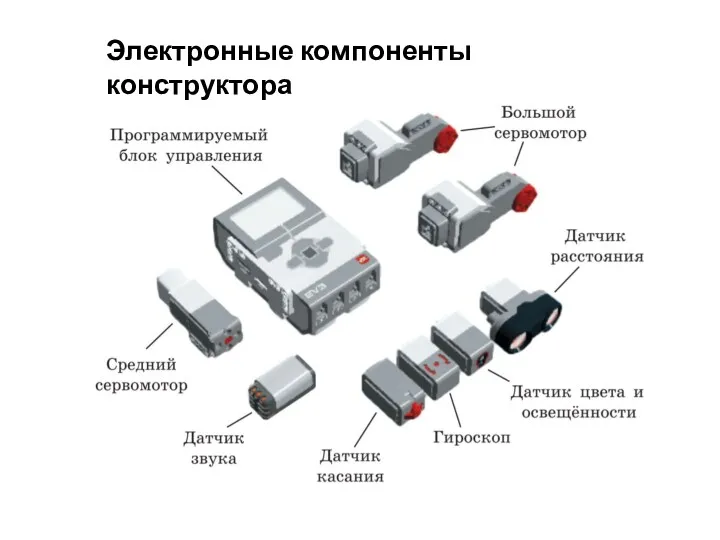
Электронные компоненты конструктора
Электронные компоненты конструктора

Детали конструктора
Детали конструктора
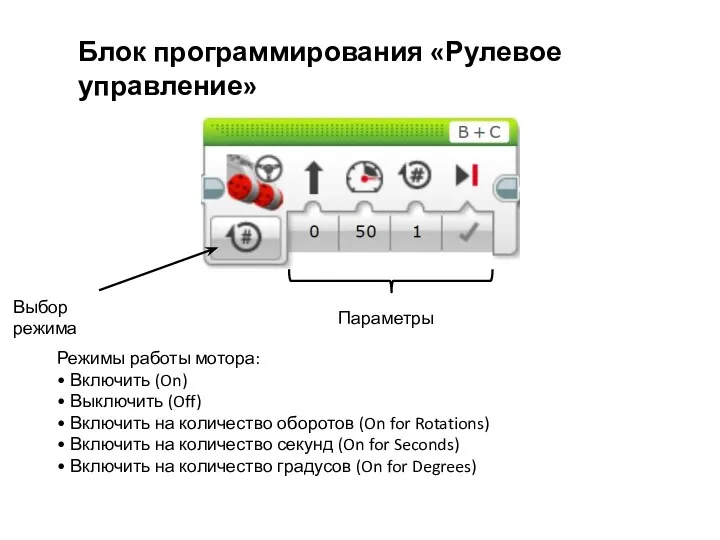
Блок программирования «Рулевое управление»
Режимы работы мотора:
• Включить (On)
• Выключить (Off)
• Включить
Блок программирования «Рулевое управление»
Режимы работы мотора:
• Включить (On)
• Выключить (Off)
• Включить

Параметры режимов блока «Рулевое управление»
Параметры режимов блока «Рулевое управление»
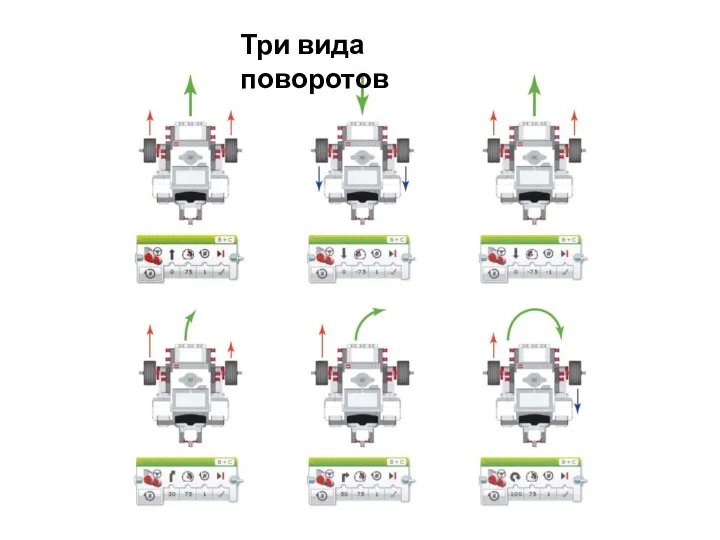
Три вида поворотов
Три вида поворотов
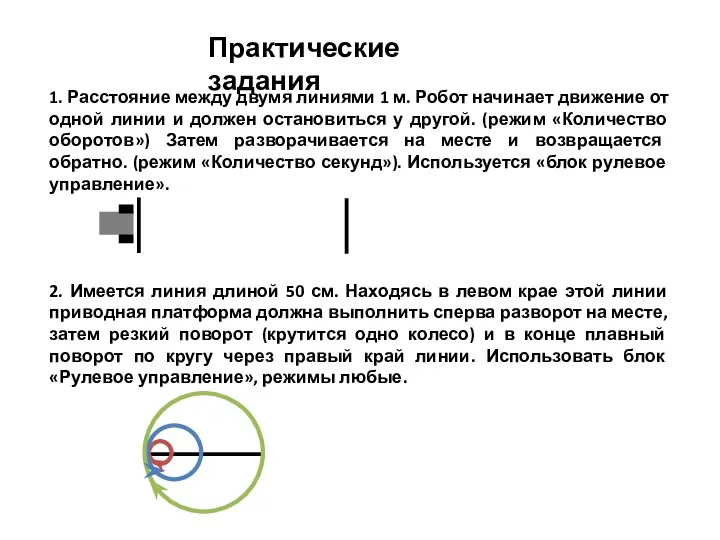
Практические задания
2. Имеется линия длиной 50 см. Находясь в левом крае
Практические задания
2. Имеется линия длиной 50 см. Находясь в левом крае
Практические задания
3. Имеется ограниченная двумя линиями криволинейная трасса шириной 25-30 см.
Практические задания
3. Имеется ограниченная двумя линиями криволинейная трасса шириной 25-30 см.
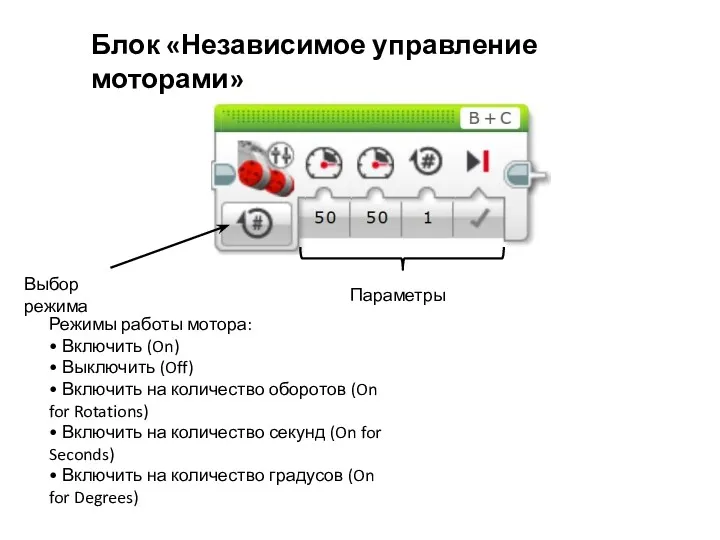
Блок «Независимое управление моторами»
Выбор режима
Параметры
Режимы работы мотора:
• Включить (On)
• Выключить (Off)
•
Блок «Независимое управление моторами»
Выбор режима
Параметры
Режимы работы мотора:
• Включить (On)
• Выключить (Off)
•
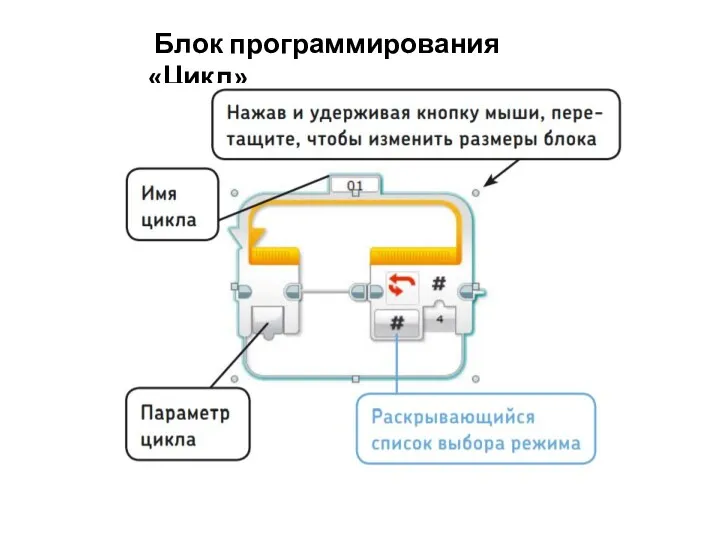
Блок программирования «Цикл»
Блок программирования «Цикл»
Практические задания
3. Изучаем геометрические фигуры. Рисуем круг, квадрат. Сколько блоков
Практические задания
3. Изучаем геометрические фигуры. Рисуем круг, квадрат. Сколько блоков

Блок «Звук»
Блок «Звук»
Практические задания
4. С помощью блоков Звук (Sound), сделайте так, чтобы
Практические задания
4. С помощью блоков Звук (Sound), сделайте так, чтобы
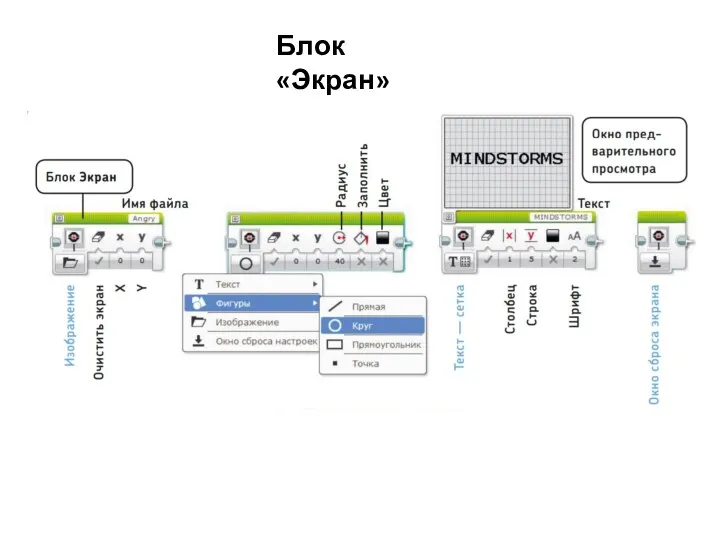
Блок «Экран»
Блок «Экран»
Практические задания
5. С помощью блоков «Экран» и звук, сделайте мультик
Практические задания
5. С помощью блоков «Экран» и звук, сделайте мультик

Блок «Состояние модуля»
Блок «Состояние модуля»
Практические задания
6. Создайте программу, с помощью которой робот говорил бы
Практические задания
6. Создайте программу, с помощью которой робот говорил бы
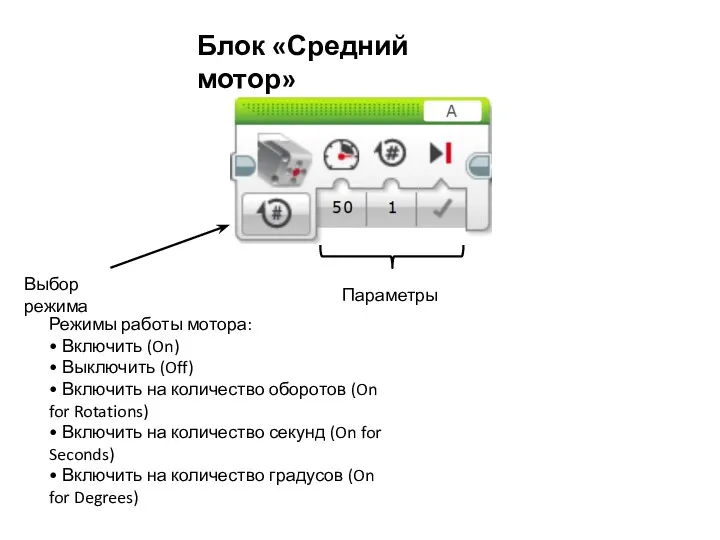
Блок «Средний мотор»
Выбор режима
Параметры
Режимы работы мотора:
• Включить (On)
• Выключить (Off)
• Включить
Блок «Средний мотор»
Выбор режима
Параметры
Режимы работы мотора:
• Включить (On)
• Выключить (Off)
• Включить
Практические задания
8. Соберите ковш. Переместите кубик.
Практические задания
8. Соберите ковш. Переместите кубик.
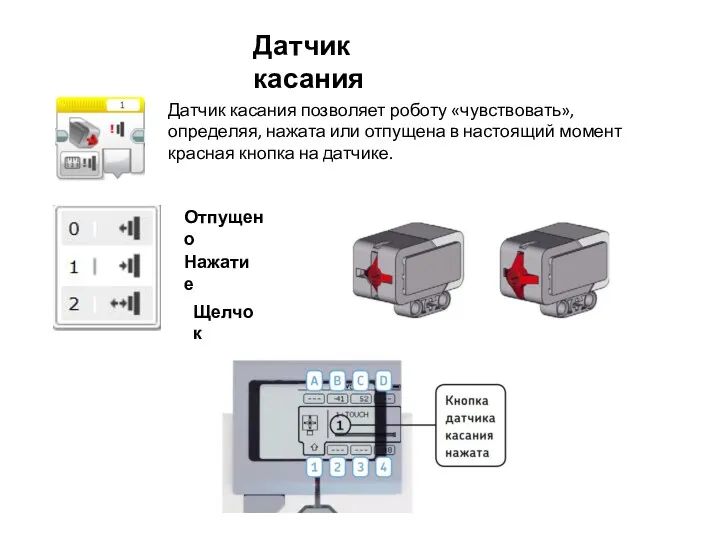
Датчик касания
Отпущено
Нажатие
Щелчок
Датчик касания позволяет роботу «чувствовать», определяя, нажата или отпущена в
Датчик касания
Отпущено
Нажатие
Щелчок
Датчик касания позволяет роботу «чувствовать», определяя, нажата или отпущена в
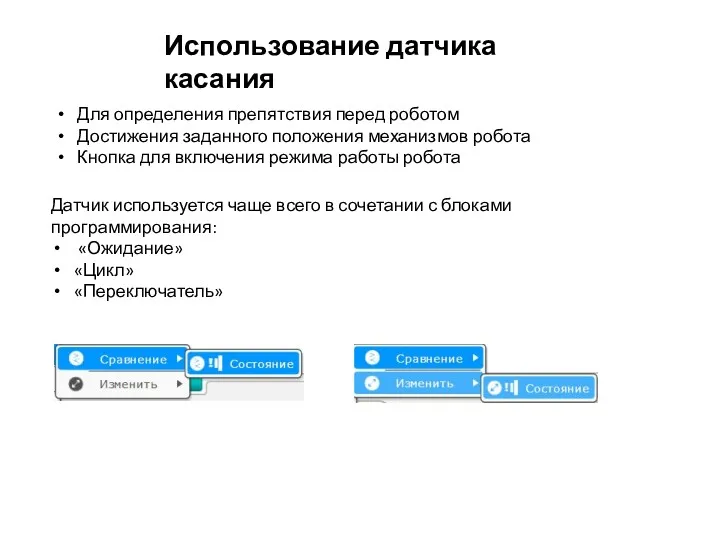
Использование датчика касания
Для определения препятствия перед роботом
Достижения заданного положения механизмов робота
Кнопка
Использование датчика касания
Для определения препятствия перед роботом
Достижения заданного положения механизмов робота
Кнопка
Практические задания
9. Запрограммируйте блок управления таким образом, чтобы при нажатии
Практические задания
9. Запрограммируйте блок управления таким образом, чтобы при нажатии
Практические задания
14. Изучение блока «Переключатель». Запрограммируйте робота ехать вперед три
Практические задания
14. Изучение блока «Переключатель». Запрограммируйте робота ехать вперед три
Датчик цвета
Датчик цвета может определить цвет поверхности (в режиме Цвет (Color)),
Датчик цвета
Датчик цвета может определить цвет поверхности (в режиме Цвет (Color)),

Цветовой режим датчика цвета
В этом режиме датчик может определять цвет
Цветовой режим датчика цвета
В этом режиме датчик может определять цвет
Практические задания
15. Движение робота по линии. Используйте датчик цвета и
Практические задания
15. Движение робота по линии. Используйте датчик цвета и
Режим яркость отраженного света
В этом режиме датчик может определить разницу
Режим яркость отраженного света
В этом режиме датчик может определить разницу
Пороговое значение отражения
Когда датчик частично фиксирует черную линию и частично белую
Пороговое значение отражения
Когда датчик частично фиксирует черную линию и частично белую
Плавное движение по трассе
Используйте два дополнительных расчёта порогового значения для плавного
Плавное движение по трассе
Используйте два дополнительных расчёта порогового значения для плавного
Практические задания
19. Создайте простейшую программу движения по черной линии с
Практические задания
19. Создайте простейшую программу движения по черной линии с
 Проект Хоровод-круглый год
Проект Хоровод-круглый год Отчет о педагогической деятельности
Отчет о педагогической деятельности Профессионально-педагогическая компетентность
Профессионально-педагогическая компетентность Пословицы и поговорки о труде
Пословицы и поговорки о труде Половые железы
Половые железы Презентация по теме Строение атома фосфора. Аллотропные модификации.
Презентация по теме Строение атома фосфора. Аллотропные модификации. Виды информации
Виды информации Chemical element
Chemical element Interroll Dynamic Storage CoE
Interroll Dynamic Storage CoE музыкальная речь
музыкальная речь Интеллектуальная игра Умники и умницы
Интеллектуальная игра Умники и умницы Адаптация 1-ых классов.
Адаптация 1-ых классов. Рисунок геометрических тел
Рисунок геометрических тел Виготовлення виробів з пластмас
Виготовлення виробів з пластмас Что такое магический квадрат
Что такое магический квадрат Реконструкция электрической части станции типа КЭС
Реконструкция электрической части станции типа КЭС Mega Projects – The archipelago of The World, Dubai
Mega Projects – The archipelago of The World, Dubai Симплекс-метод решения задач линейного программирования
Симплекс-метод решения задач линейного программирования Маркетинговая концепция предприятия
Маркетинговая концепция предприятия Урок вежливости В стране слов
Урок вежливости В стране слов Пасадки гладких цилиндров
Пасадки гладких цилиндров проэктСказки
проэктСказки Тверской край в IX – XI веках
Тверской край в IX – XI веках Организация деятельности общероссийской детско-юношеской организации Российское движение школьников
Организация деятельности общероссийской детско-юношеской организации Российское движение школьников ichneumonidae-mesochorinae-syst
ichneumonidae-mesochorinae-syst Фрезерование. Выбор шага зубьев
Фрезерование. Выбор шага зубьев Микроконтроллеры. (Лекция 3)
Микроконтроллеры. (Лекция 3) Автоматизация звуков [Ш]-[Ж] в слогах, словах.
Автоматизация звуков [Ш]-[Ж] в слогах, словах.