- Коррелатный способ уравнивания

Содержание
- 2. Коррелатный способ уравнивания Устранение невязки (неопределенности) введением в измерения поправок vi. Тогда уравнения связи будут f1(x1
- 3. Коррелатный способ уравнивания Развернутая запись Матричная запись В⋅v + w = 0 r условных уравнений поправок
- 4. Коррелатный способ уравнивания Матрица В – строк по количеству условий r, столбцов по количеству измерений n
- 5. Коррелатный способ уравнивания Формулировка задачи в матричном виде: найти минимум ЦФ Ф = [pv2] = vTPv
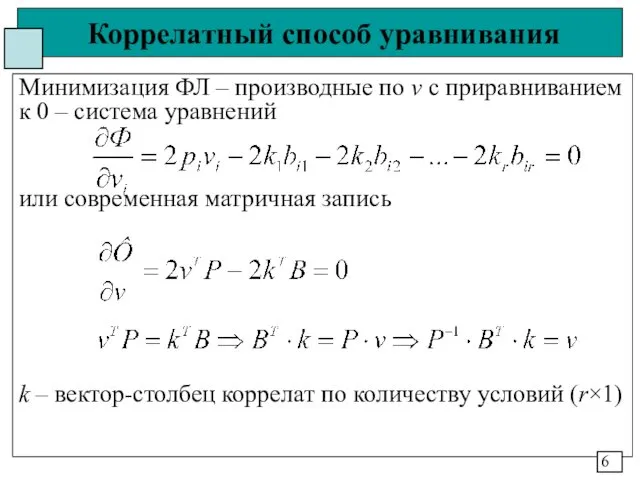
- 6. Коррелатный способ уравнивания Минимизация ФЛ – производные по v с приравниванием к 0 – система уравнений
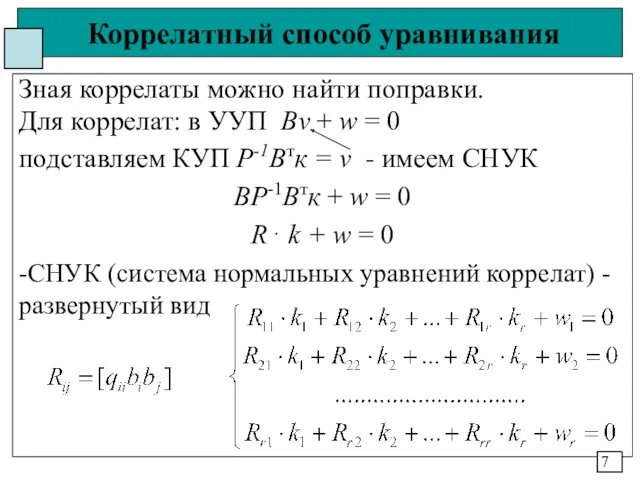
- 7. Коррелатный способ уравнивания Зная коррелаты можно найти поправки. Для коррелат: в УУП Bv + w =
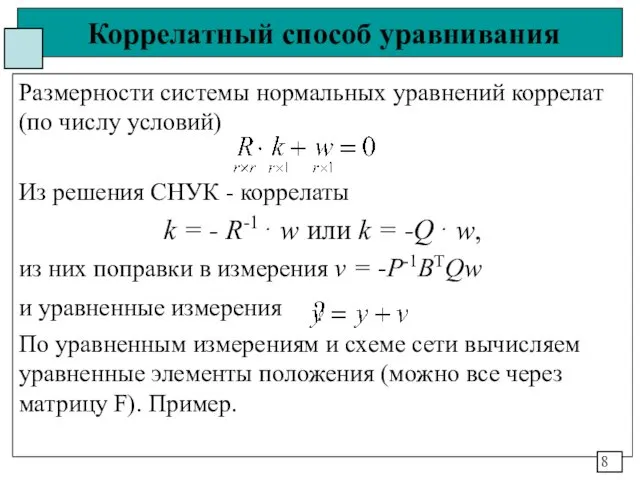
- 8. Коррелатный способ уравнивания Размерности системы нормальных уравнений коррелат (по числу условий) Из решения СНУК - коррелаты
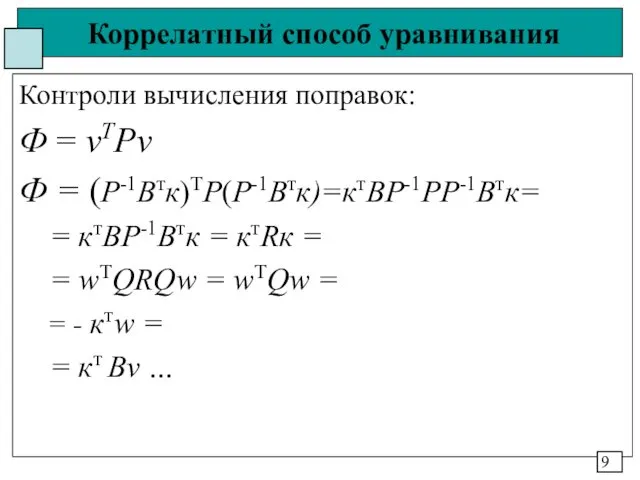
- 9. Коррелатный способ уравнивания Контроли вычисления поправок: Ф = vTPv Ф = (Р-1Втк)ТР(Р-1Втк)=ктВР-1РР-1Втк= = ктВР-1Втк = ктRк
- 10. Коррелатный способ уравнивания -контроль вычислений: по целевой функции уравнивания 2. сумма поправок по условию уничтожает невязку:
- 11. Коррелатный способ уравнивания Пример: n = 5 k = 2 r = 3 Условия: (неоднозначны) 11
- 12. Коррелатный способ уравнивания Подозрение на зависимость – их сумма и найти такое же условие. Из условий-
- 13. Коррелатный способ уравнивания Обратные веса , матрица обратных весов варианты с с Матрица нормальных уравнений коррелат
- 14. Коррелатный способ уравнивания Тогда правило составление матрицы по схеме. Коррелаты: Поправки в измерения: 14
- 15. Коррелатный способ уравнивания Предпочтительность способов уравнивания: n – общее число измерений к – число необходимых измерений
- 16. Коррелатный способ уравнивания Основные условия в геодезических построениях: Высотные построения, в ходах всегда 1 условие высотных
- 17. Коррелатный способ уравнивания Угловые условия. Линейные: Условия фигур по сумме углов Условие горизонта по замыканию суммы
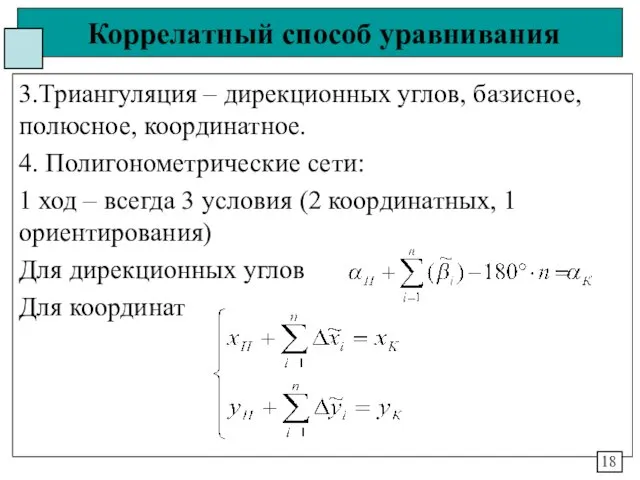
- 18. Коррелатный способ уравнивания 3.Триангуляция – дирекционных углов, базисное, полюсное, координатное. 4. Полигонометрические сети: 1 ход –
- 20. Скачать презентацию
Коррелатный способ уравнивания
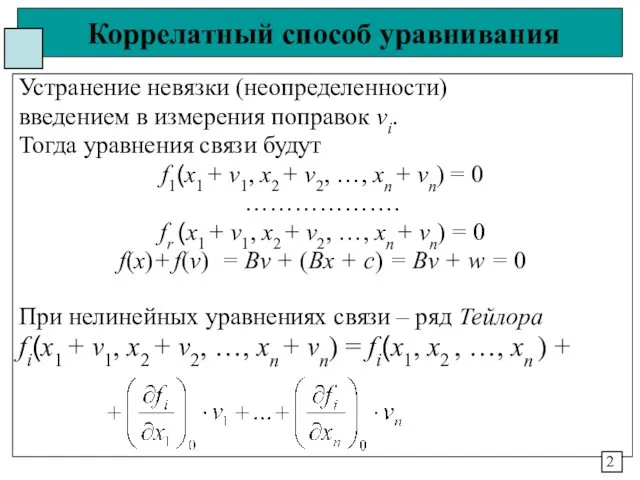
Устранение невязки (неопределенности)
введением в измерения поправок vi.
Тогда уравнения
Коррелатный способ уравнивания
Устранение невязки (неопределенности)
введением в измерения поправок vi.
Тогда уравнения
Коррелатный способ уравнивания
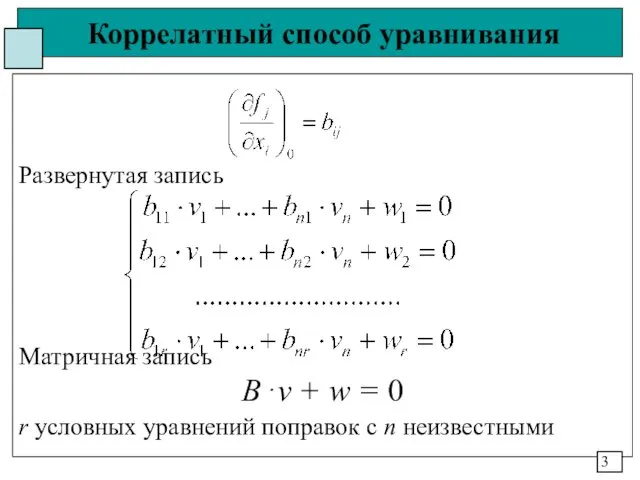
Развернутая запись
Матричная запись
В⋅v + w = 0
r условных
Коррелатный способ уравнивания
Развернутая запись
Матричная запись
В⋅v + w = 0
r условных
Коррелатный способ уравнивания
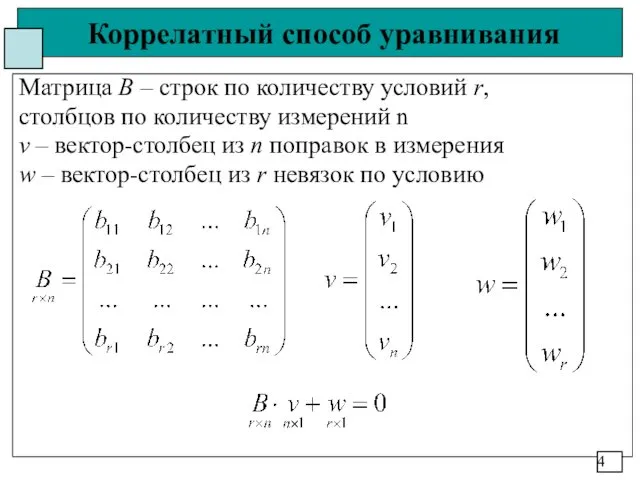
Матрица В – строк по количеству условий r,
столбцов
Коррелатный способ уравнивания
Матрица В – строк по количеству условий r,
столбцов
Коррелатный способ уравнивания
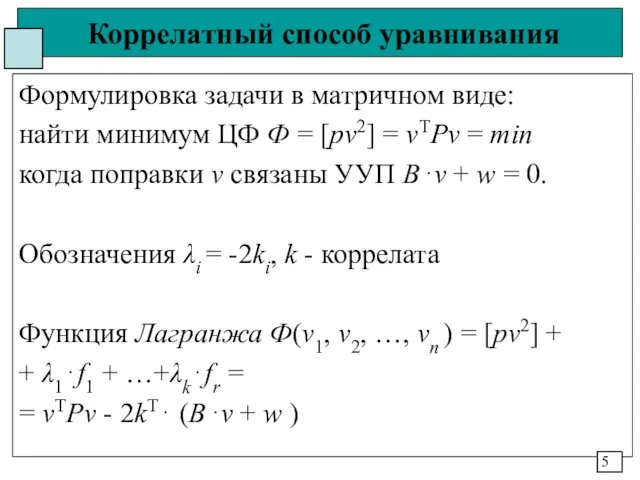
Формулировка задачи в матричном виде:
найти минимум ЦФ Ф
Коррелатный способ уравнивания
Формулировка задачи в матричном виде:
найти минимум ЦФ Ф
Коррелатный способ уравнивания
Минимизация ФЛ – производные по v с приравниванием
Коррелатный способ уравнивания
Минимизация ФЛ – производные по v с приравниванием
Коррелатный способ уравнивания
Зная коррелаты можно найти поправки.
Для коррелат: в
Коррелатный способ уравнивания
Зная коррелаты можно найти поправки.
Для коррелат: в
Коррелатный способ уравнивания
Размерности системы нормальных уравнений коррелат (по числу условий)
Из
Коррелатный способ уравнивания
Размерности системы нормальных уравнений коррелат (по числу условий)
Из
Коррелатный способ уравнивания
Контроли вычисления поправок:
Ф = vTPv
Ф = (Р-1Втк)ТР(Р-1Втк)=ктВР-1РР-1Втк=
=
Коррелатный способ уравнивания
Контроли вычисления поправок:
Ф = vTPv
Ф = (Р-1Втк)ТР(Р-1Втк)=ктВР-1РР-1Втк=
=
Коррелатный способ уравнивания
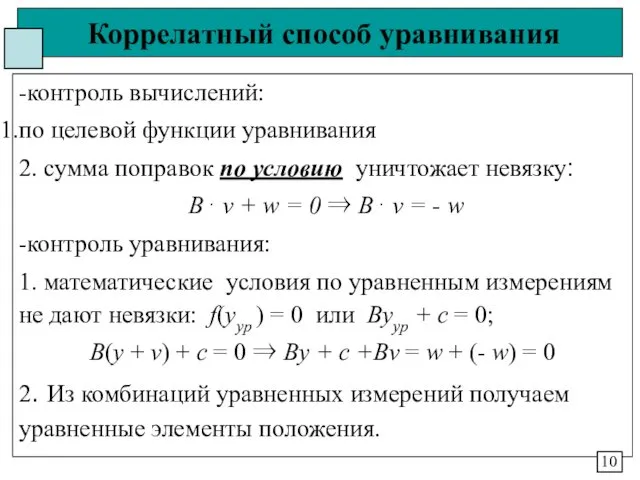
-контроль вычислений:
по целевой функции уравнивания
2. сумма поправок
Коррелатный способ уравнивания
-контроль вычислений:
по целевой функции уравнивания
2. сумма поправок
Коррелатный способ уравнивания
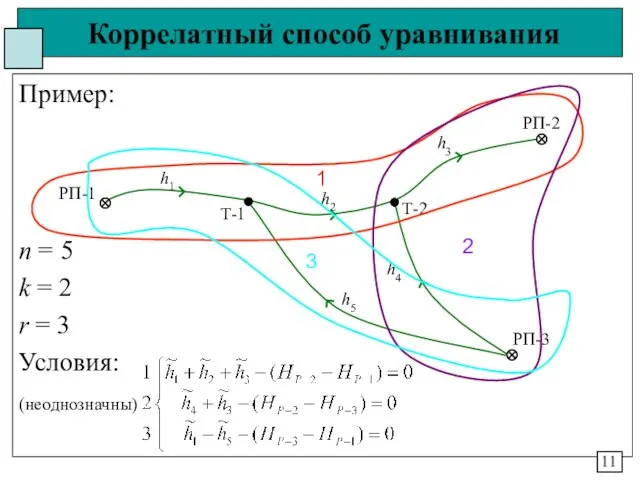
Пример:
n = 5
k = 2
r = 3
Условия:
(неоднозначны)
Коррелатный способ уравнивания
Пример:
n = 5
k = 2
r = 3
Условия:
(неоднозначны)
Коррелатный способ уравнивания
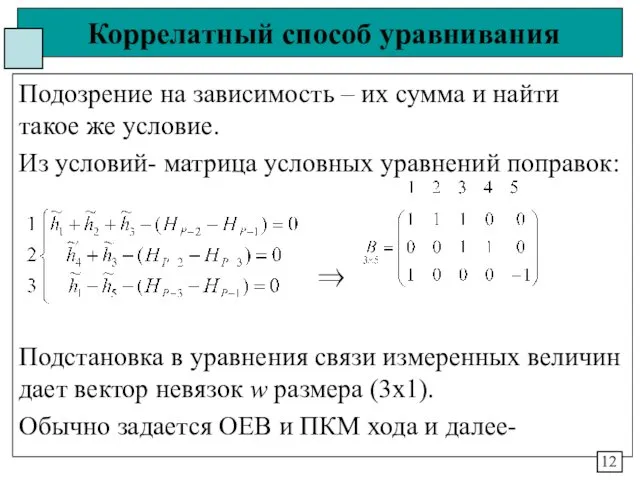
Подозрение на зависимость – их сумма и найти
Коррелатный способ уравнивания
Подозрение на зависимость – их сумма и найти
Коррелатный способ уравнивания
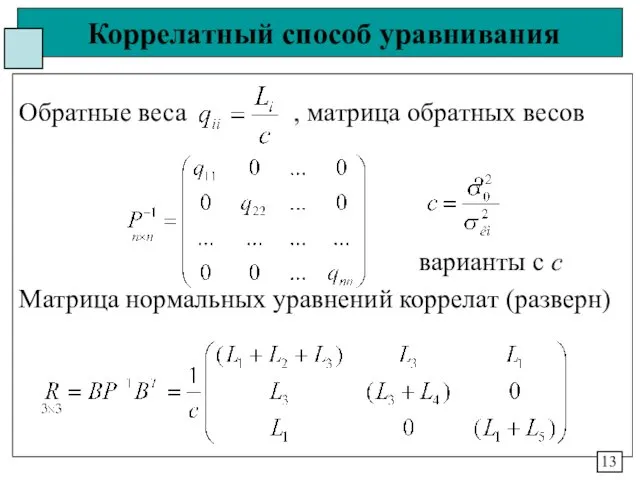
Обратные веса , матрица обратных весов
варианты с
Коррелатный способ уравнивания
Обратные веса , матрица обратных весов
варианты с
Коррелатный способ уравнивания
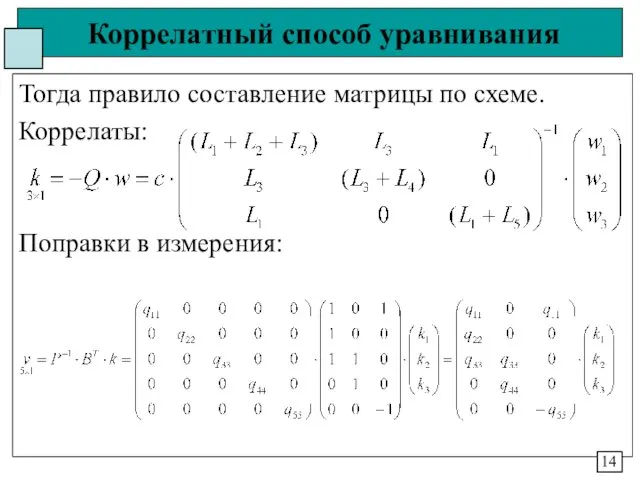
Тогда правило составление матрицы по схеме.
Коррелаты:
Поправки в измерения:
Коррелатный способ уравнивания
Тогда правило составление матрицы по схеме.
Коррелаты:
Поправки в измерения:
Коррелатный способ уравнивания
Предпочтительность способов уравнивания:
n – общее число измерений
к –
Коррелатный способ уравнивания
Предпочтительность способов уравнивания:
n – общее число измерений
к –
Коррелатный способ уравнивания
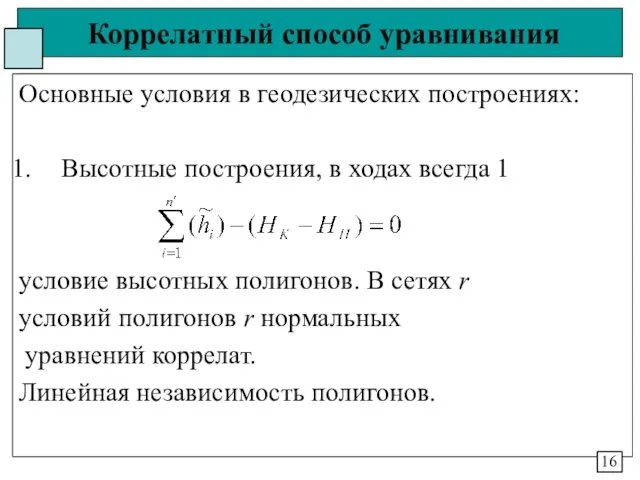
Основные условия в геодезических построениях:
Высотные построения, в ходах
Коррелатный способ уравнивания
Основные условия в геодезических построениях:
Высотные построения, в ходах
Коррелатный способ уравнивания
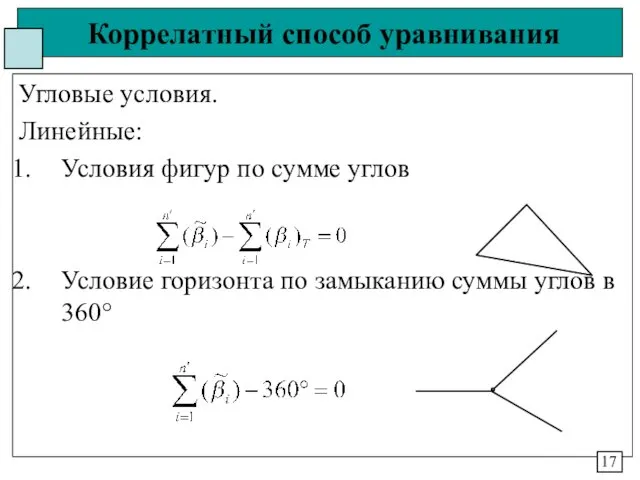
Угловые условия.
Линейные:
Условия фигур по сумме углов
Условие горизонта по
Коррелатный способ уравнивания
Угловые условия.
Линейные:
Условия фигур по сумме углов
Условие горизонта по
Коррелатный способ уравнивания
3.Триангуляция – дирекционных углов, базисное, полюсное, координатное.
4. Полигонометрические
Коррелатный способ уравнивания
3.Триангуляция – дирекционных углов, базисное, полюсное, координатное.
4. Полигонометрические
 Религия. Готовимся к ЕГЭ
Религия. Готовимся к ЕГЭ Налоги
Налоги Игра как активная форма развития воображения у детей дошкольного возраста
Игра как активная форма развития воображения у детей дошкольного возраста Силы взаимодействия винта, руля и корпуса судна
Силы взаимодействия винта, руля и корпуса судна Презентация Опыт работы Формирование эмоциональной отзывчивости дошкольников в театрализованной деятельности
Презентация Опыт работы Формирование эмоциональной отзывчивости дошкольников в театрализованной деятельности Специальные гидравлические машины пищевых производств, компрессоры и вакуум-насосы
Специальные гидравлические машины пищевых производств, компрессоры и вакуум-насосы Презентация Пудель
Презентация Пудель Зооветеринарный аудит в скотоводстве
Зооветеринарный аудит в скотоводстве Презентация Петров (1)
Презентация Петров (1) Роль притч в самоопределении личности учащихся в процессе преподавания курса ОРКСЭ
Роль притч в самоопределении личности учащихся в процессе преподавания курса ОРКСЭ Смутное время (1598 - 1613)
Смутное время (1598 - 1613) Семинар-практикум Синквейн в ознакомлении дошкольников с трудом взрослых
Семинар-практикум Синквейн в ознакомлении дошкольников с трудом взрослых Инфинит от ФОРЕВЕР
Инфинит от ФОРЕВЕР Индивидуально - типологические подходы на уроках математики.
Индивидуально - типологические подходы на уроках математики. Схема запуска преобразователя электропоезда ЭД2Т
Схема запуска преобразователя электропоезда ЭД2Т 20240201_postroyka_bashni
20240201_postroyka_bashni Транссибирская магистраль
Транссибирская магистраль Презентация Строение цветковых растений
Презентация Строение цветковых растений Принтер. Понятие
Принтер. Понятие Елементна база комп‘ютерної електроніки та аналогові електронні пристрої. Напівпровідникові діоди. (Тема 1.1)
Елементна база комп‘ютерної електроніки та аналогові електронні пристрої. Напівпровідникові діоди. (Тема 1.1) Масленица. Сказка
Масленица. Сказка Вероятностные методы обработки информации
Вероятностные методы обработки информации Классный час Наша первая отметка
Классный час Наша первая отметка Рождество в русской поэзии
Рождество в русской поэзии Состав и структура ракетно-космического комплекса. Лекция № 3
Состав и структура ракетно-космического комплекса. Лекция № 3 Синтоизм - национальная религия Японии
Синтоизм - национальная религия Японии Экологический мониторинг
Экологический мониторинг Кожевенное производство. Энерго- и ресурсосбережение
Кожевенное производство. Энерго- и ресурсосбережение