- Линейные системы авторегулирования с цифровым регулятором. (Лекция 5)

Содержание
- 2. Линейные системы с цифровым регулятором относятся к классу линейных импульсных систем автоматического управления (ИС). Основная особенность
- 3. Структурная схема ИС. Рассмотрим элементы этой схемы. 1. Преобразователь «аналог-код» преобразует сигнал непрерывного элемента e(t) в
- 4. Преобразователь «аналог-код» служит для перехода от аналоговой формы сигнала к цифровой форме, т.е. для квантования сигнала
- 5. 2. Цифровой регулятор D(z). Осуществляет преобразование поступающей на его вход числовой последовательности e[n] в соответствии с
- 6. 3. Преобразователь код-аналог (амплитудно-импульсный модулятор) называют также формирователем, экстраполятором или амплитудно-импульсным элементом. Функцию, задающую форму импульса
- 7. Z-преобразование. Прямое Z-преобразование: (1) Часто используется обозначение: где f [n] – исходная числовая последовательность. Обратное Z-преобразование:
- 8. Свойства Z-преобразования. Пусть имеются две функции: 1. Линейность. или или 2. Теорема об умножении оригинала на
- 9. 5. Теорема упреждения. 6. Z-преобразование разности. 4. Теорема целочисленного запаздывания. 3. Теорема об умножении оригинала на
- 10. 7. Z-преобразование суммы числовой последовательности. 8. Теорема о начальном значении.
- 11. 9. Теорема о конечном значении. Если существует предел То значение f[∞] может быть вычислено по соотношению:
- 12. Описание сигналов с помощью δ-функций. Пусть x(t) – некоторая функция. Преобразование Лапласа функции x(t) равно X(p).
- 13. К δ-последовательности, в отличие от числовой последовательности, можно применить преобразование Лапласа: Дискретным преобразованием Лапласа последовательности x(nT)
- 14. В теории Z-преобразования имеют очень важное значение две последовательности: 1. Дискретный единичный скачок (дискретная функция Хевисайда)
- 15. Z-преобразование от дискретного единичного скачка: Мы использовали формулу для суммы бесконечно убывающей геометрической прогрессии. Знаменатель прогрессии
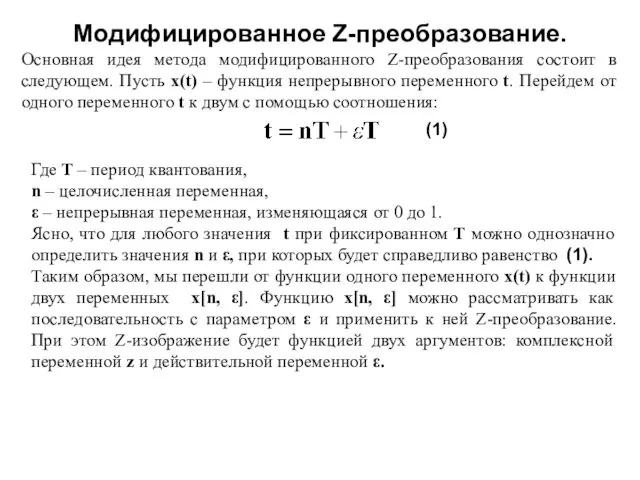
- 16. Модифицированное Z-преобразование. Основная идея метода модифицированного Z-преобразования состоит в следующем. Пусть x(t) – функция непрерывного переменного
- 17. Определение. Модифицированным Z-преобразованием последовательности x[n, ε] или функции x(t) называется Z-изображение: (2) или (3) Теорема об
- 18. Теорема запаздывания. Пусть Требуется вычислить (6) Выделим целую и дробную часть периодов квантования в величине запаздывания:
- 19. Разностные (рекуррентные) уравнения. Линейным разностным (рекуррентным) уравнением порядка r называют следующее соотношение: (1) Обычно cr полагают
- 20. где d – неизвестное заранее ненулевое число. Подставляем данное выражение для y[n] в (1) и получаем:
- 21. Устойчивость решения разностного уравнения. По аналогии с обыкновенными дифференциальными уравнениями разностное уравнение называется: асимптотически устойчивым, если
- 22. Какой из указанных трёх случаев имеет место, зависит от корней характеристического уравнения. a) Если все корни
- 23. Аналогично, уравнение будет нейтральным, если кроме корней единичного круга, оно имеет некратный корень на круге ).
- 24. Теперь мы располагаем всем необходимым аппаратом для расчета импульсных систем. Запишем систему уравнений, следуя движению сигнала
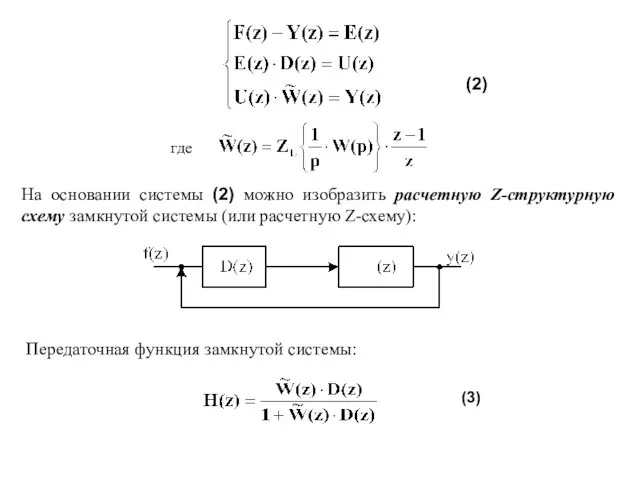
- 25. где (2) На основании системы (2) можно изобразить расчетную Z-структурную схему замкнутой системы (или расчетную Z-схему):
- 26. Z- передаточная функция и весовая последовательность цифрового блока. Цифровой блок Предположим, что числовые последовательности на входе
- 27. Согласно теореме о свертке выходная и входная последовательность связаны соотношением: Где последовательность χ[n] , которую называют
- 28. Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования. В аналоговых регуляторах используются следующие типовые законы регулирования:
- 29. Z-передаточная функция цифрового ПИД-регулятора имеет вид: Устойчивость импульсных систем. Устойчивость ИС целиком определяется расположением корней знаменателя
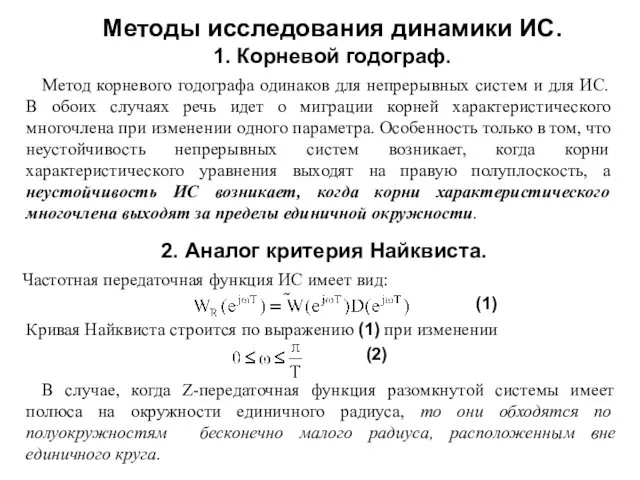
- 30. Методы исследования динамики ИС. 1. Корневой годограф. Метод корневого годографа одинаков для непрерывных систем и для
- 31. Критерий Найквиста для импульсных систем. Для устойчивости замкнутой системы необходимо и достаточно, чтобы при изменении переменной
- 33. Скачать презентацию
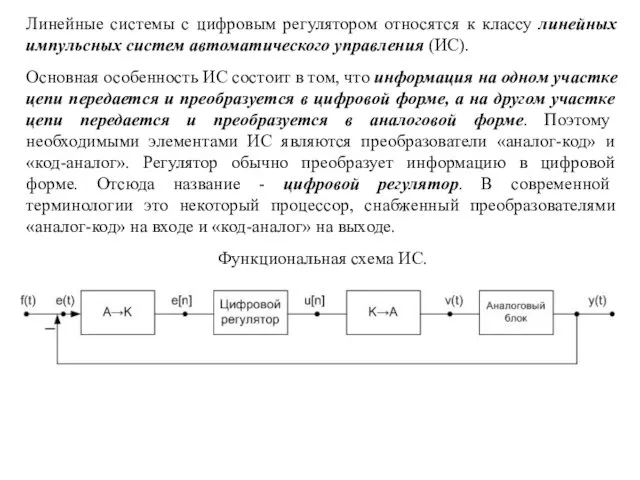
Линейные системы с цифровым регулятором относятся к классу линейных импульсных систем
Линейные системы с цифровым регулятором относятся к классу линейных импульсных систем
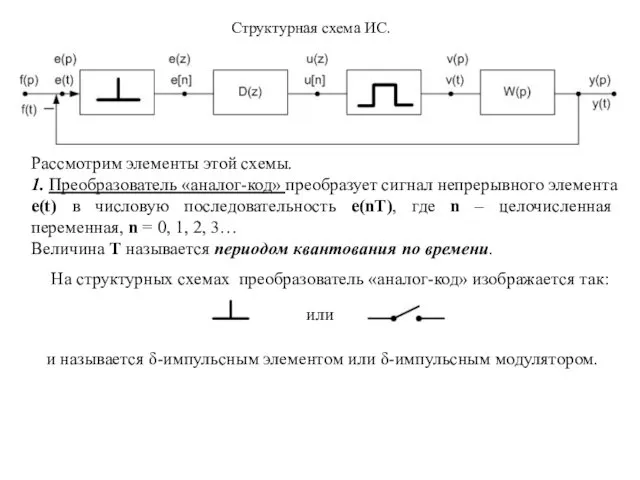
Структурная схема ИС.
Рассмотрим элементы этой схемы.
1. Преобразователь «аналог-код» преобразует сигнал
Структурная схема ИС.
Рассмотрим элементы этой схемы.
1. Преобразователь «аналог-код» преобразует сигнал
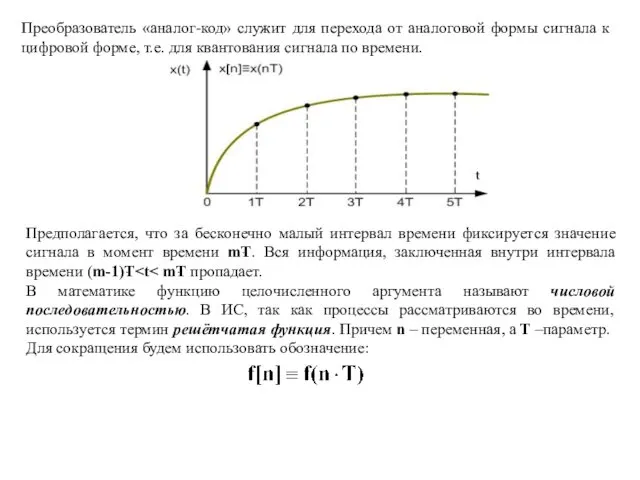
Преобразователь «аналог-код» служит для перехода от аналоговой формы сигнала к цифровой
Преобразователь «аналог-код» служит для перехода от аналоговой формы сигнала к цифровой
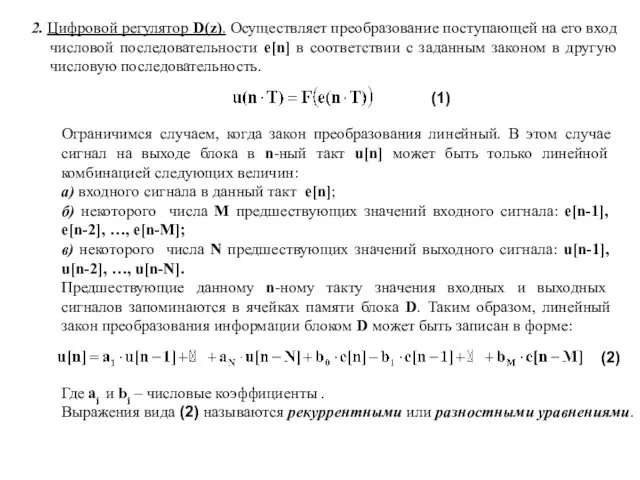
2. Цифровой регулятор D(z). Осуществляет преобразование поступающей на его вход числовой
2. Цифровой регулятор D(z). Осуществляет преобразование поступающей на его вход числовой
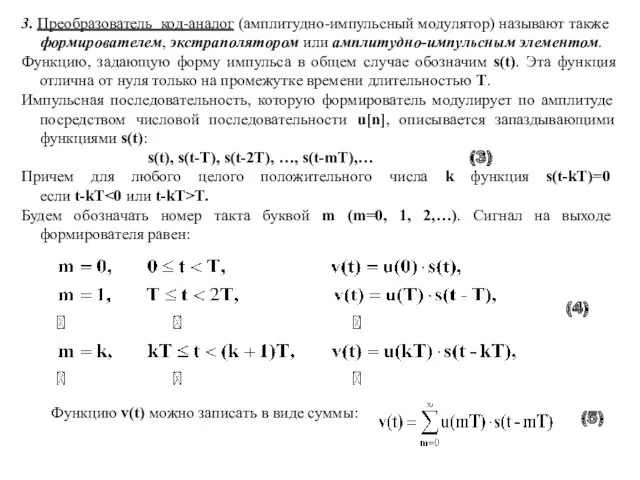
3. Преобразователь код-аналог (амплитудно-импульсный модулятор) называют также формирователем, экстраполятором или амплитудно-импульсным
3. Преобразователь код-аналог (амплитудно-импульсный модулятор) называют также формирователем, экстраполятором или амплитудно-импульсным
![Z-преобразование. Прямое Z-преобразование: (1) Часто используется обозначение: где f [n]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/56043/slide-6.jpg)
Z-преобразование.
Прямое Z-преобразование:
(1)
Часто используется обозначение:
где f [n] – исходная числовая последовательность.
Обратное
Z-преобразование.
Прямое Z-преобразование:
(1)
Часто используется обозначение:
где f [n] – исходная числовая последовательность.
Обратное
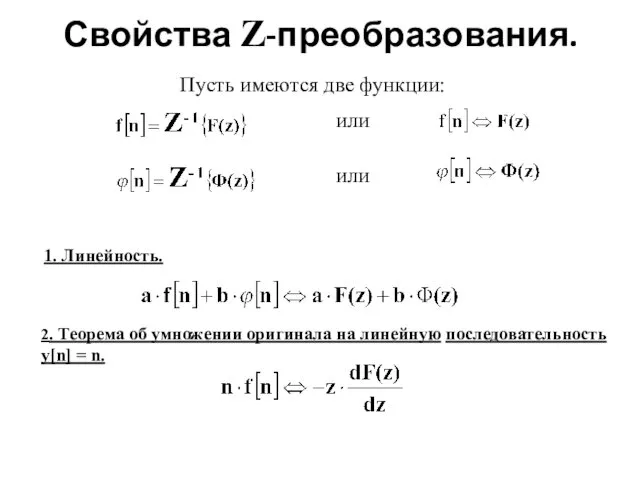
Свойства Z-преобразования.
Пусть имеются две функции:
1. Линейность.
или
или
2. Теорема об умножении оригинала на
Свойства Z-преобразования.
Пусть имеются две функции:
1. Линейность.
или
или
2. Теорема об умножении оригинала на
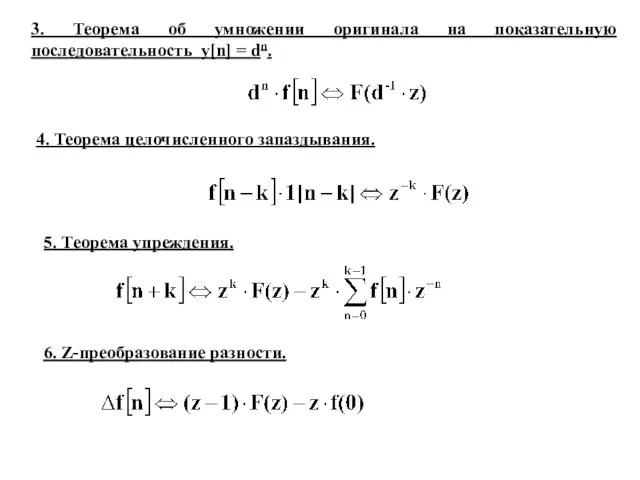
5. Теорема упреждения.
6. Z-преобразование разности.
4. Теорема целочисленного запаздывания.
3. Теорема об умножении
5. Теорема упреждения.
6. Z-преобразование разности.
4. Теорема целочисленного запаздывания.
3. Теорема об умножении
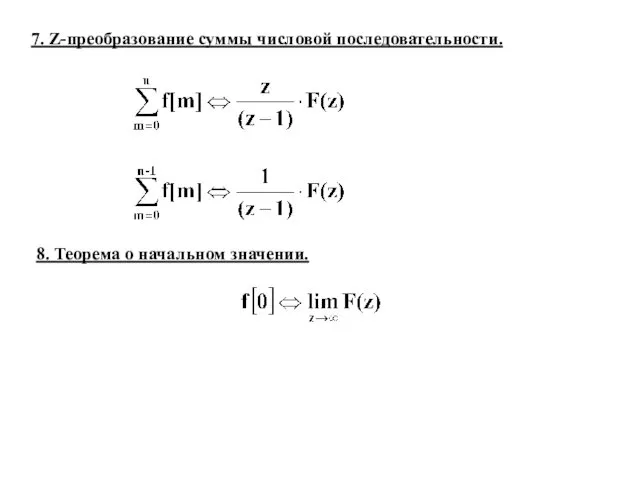
7. Z-преобразование суммы числовой последовательности.
8. Теорема о начальном значении.
7. Z-преобразование суммы числовой последовательности.
8. Теорема о начальном значении.
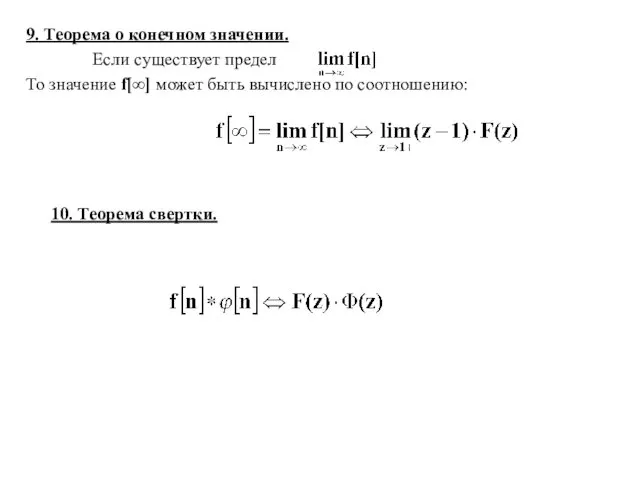
9. Теорема о конечном значении.
Если существует предел
То значение f[∞]
9. Теорема о конечном значении.
Если существует предел
То значение f[∞]
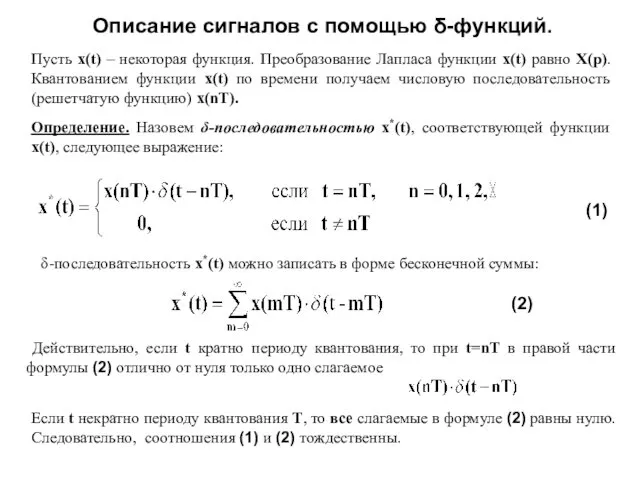
Описание сигналов с помощью δ-функций.
Пусть x(t) – некоторая функция. Преобразование Лапласа
Описание сигналов с помощью δ-функций.
Пусть x(t) – некоторая функция. Преобразование Лапласа
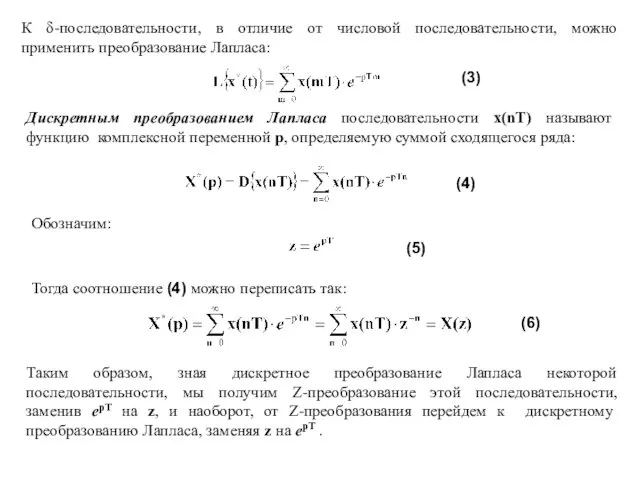
К δ-последовательности, в отличие от числовой последовательности, можно применить преобразование Лапласа:
Дискретным
К δ-последовательности, в отличие от числовой последовательности, можно применить преобразование Лапласа:
Дискретным
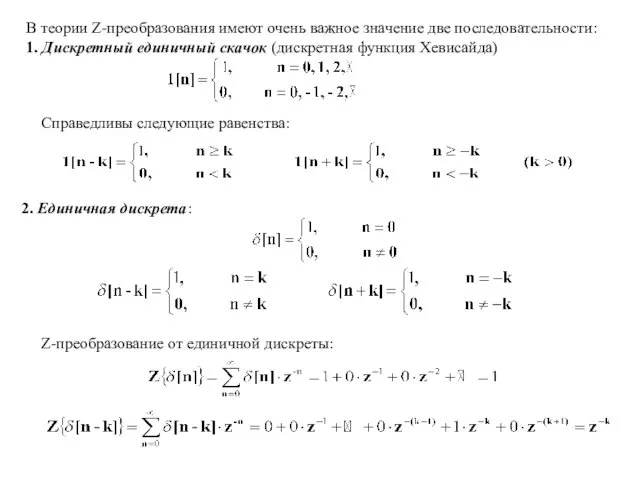
В теории Z-преобразования имеют очень важное значение две последовательности:
1. Дискретный единичный
В теории Z-преобразования имеют очень важное значение две последовательности:
1. Дискретный единичный
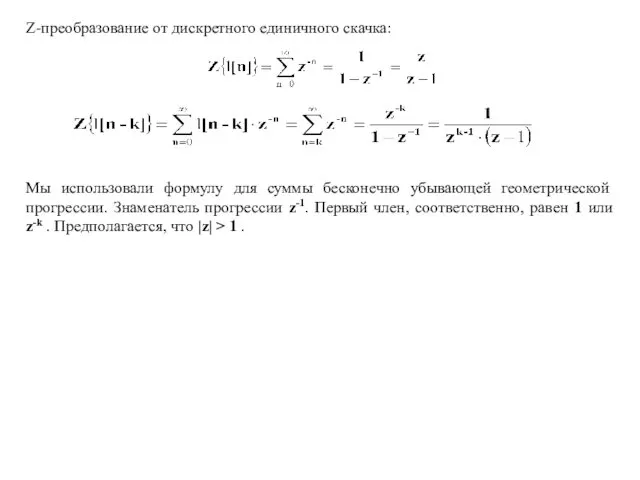
Z-преобразование от дискретного единичного скачка:
Мы использовали формулу для суммы бесконечно убывающей
Z-преобразование от дискретного единичного скачка:
Мы использовали формулу для суммы бесконечно убывающей
Модифицированное Z-преобразование.
Основная идея метода модифицированного Z-преобразования состоит в следующем. Пусть x(t)
Модифицированное Z-преобразование.
Основная идея метода модифицированного Z-преобразования состоит в следующем. Пусть x(t)
![Определение. Модифицированным Z-преобразованием последовательности x[n, ε] или функции x(t) называется](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/56043/slide-16.jpg)
Определение. Модифицированным Z-преобразованием последовательности x[n, ε] или функции x(t) называется Z-изображение:
(2)
или
(3)
Теорема
Определение. Модифицированным Z-преобразованием последовательности x[n, ε] или функции x(t) называется Z-изображение:
(2)
или
(3)
Теорема
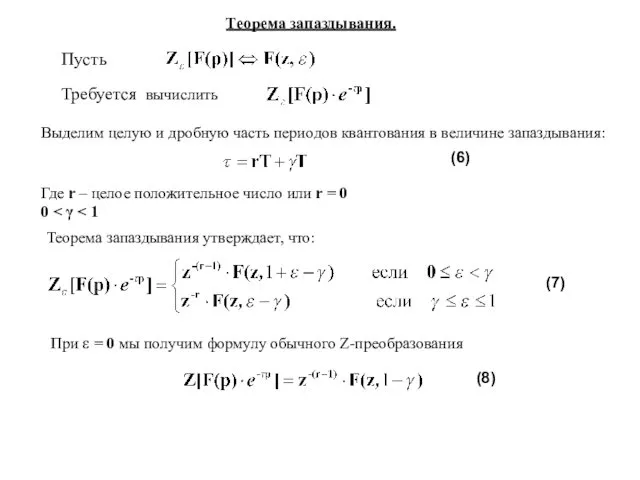
Теорема запаздывания.
Пусть
Требуется вычислить
(6)
Выделим целую и дробную часть периодов квантования
Теорема запаздывания.
Пусть
Требуется вычислить
(6)
Выделим целую и дробную часть периодов квантования
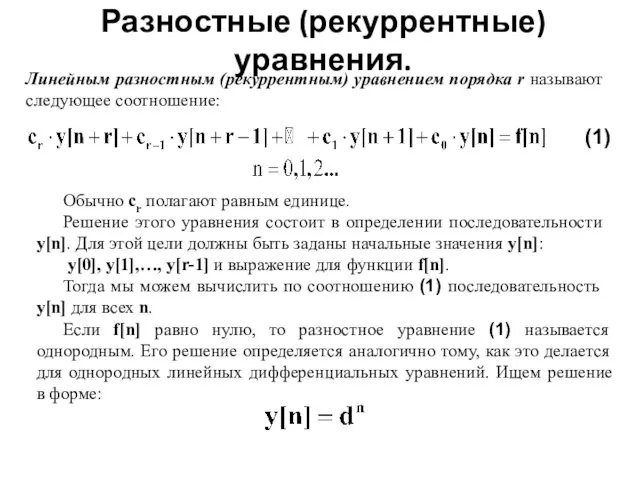
Разностные (рекуррентные) уравнения.
Линейным разностным (рекуррентным) уравнением порядка r называют следующее соотношение:
Разностные (рекуррентные) уравнения.
Линейным разностным (рекуррентным) уравнением порядка r называют следующее соотношение:
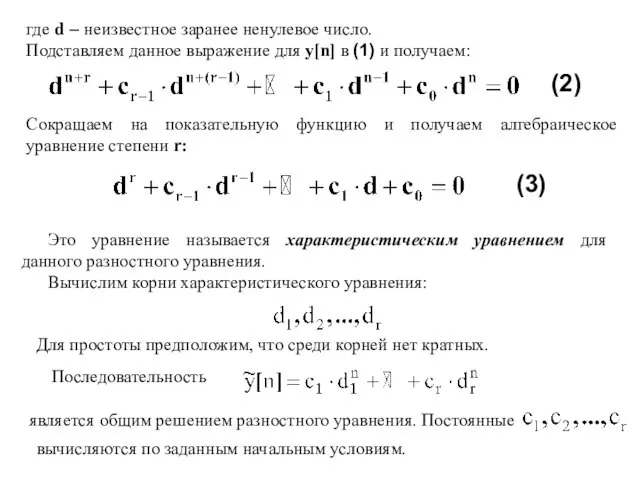
где d – неизвестное заранее ненулевое число.
Подставляем данное выражение для
где d – неизвестное заранее ненулевое число.
Подставляем данное выражение для
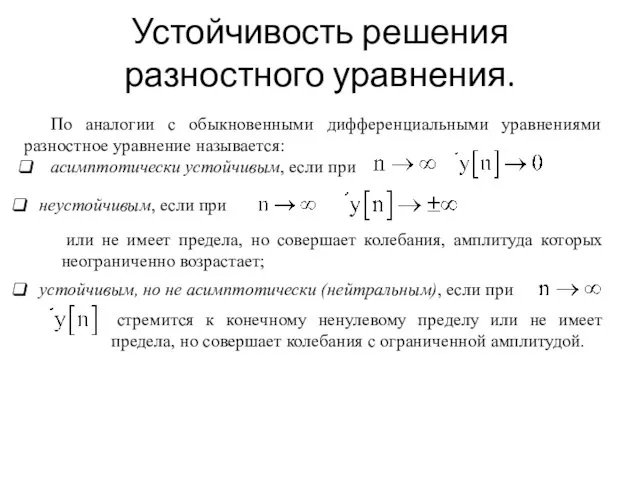
Устойчивость решения разностного уравнения.
По аналогии с обыкновенными дифференциальными уравнениями разностное
Устойчивость решения разностного уравнения.
По аналогии с обыкновенными дифференциальными уравнениями разностное
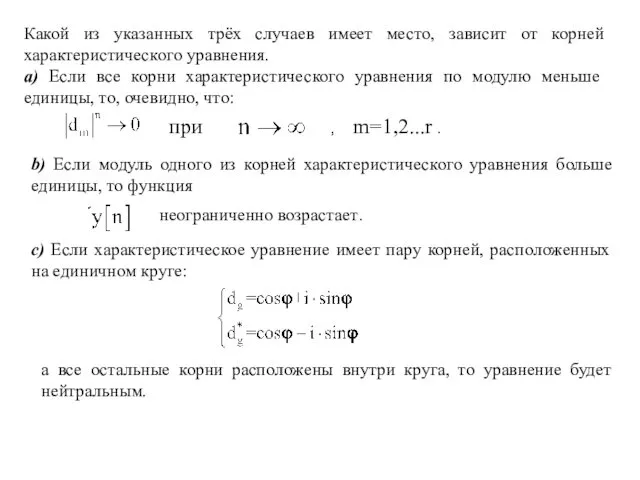
Какой из указанных трёх случаев имеет место, зависит от корней характеристического
Какой из указанных трёх случаев имеет место, зависит от корней характеристического
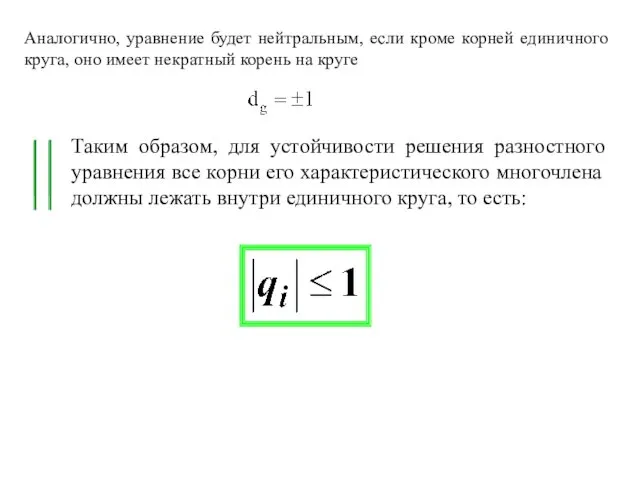
Аналогично, уравнение будет нейтральным, если кроме корней единичного круга, оно имеет
Аналогично, уравнение будет нейтральным, если кроме корней единичного круга, оно имеет
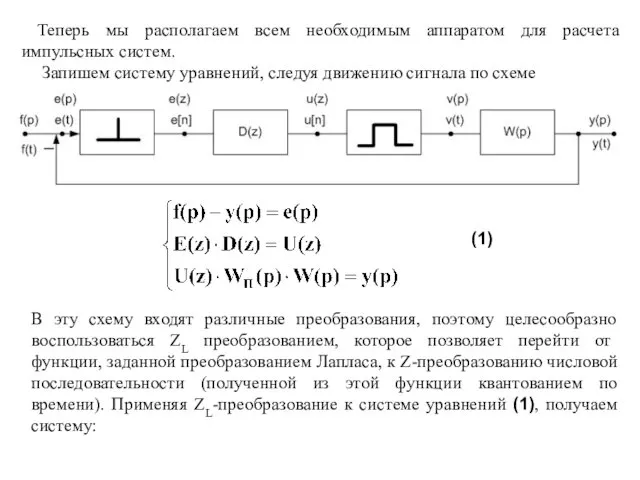
Теперь мы располагаем всем необходимым аппаратом для расчета импульсных систем.
Запишем
Теперь мы располагаем всем необходимым аппаратом для расчета импульсных систем.
Запишем
где
(2)
На основании системы (2) можно изобразить расчетную Z-структурную схему замкнутой системы
где
(2)
На основании системы (2) можно изобразить расчетную Z-структурную схему замкнутой системы
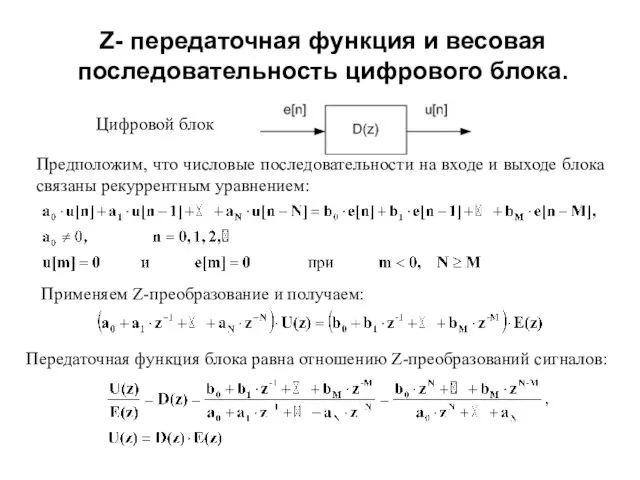
Z- передаточная функция и весовая последовательность цифрового блока.
Цифровой блок
Предположим, что числовые
Z- передаточная функция и весовая последовательность цифрового блока.
Цифровой блок
Предположим, что числовые
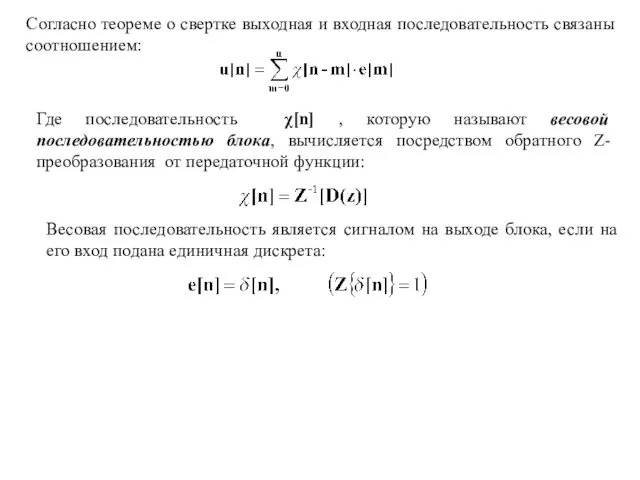
Согласно теореме о свертке выходная и входная последовательность связаны соотношением:
Где последовательность
Согласно теореме о свертке выходная и входная последовательность связаны соотношением:
Где последовательность
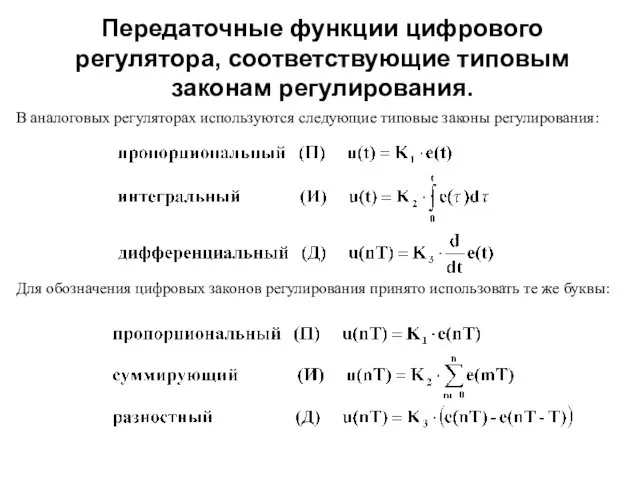
Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования.
В аналоговых регуляторах используются
Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования.
В аналоговых регуляторах используются
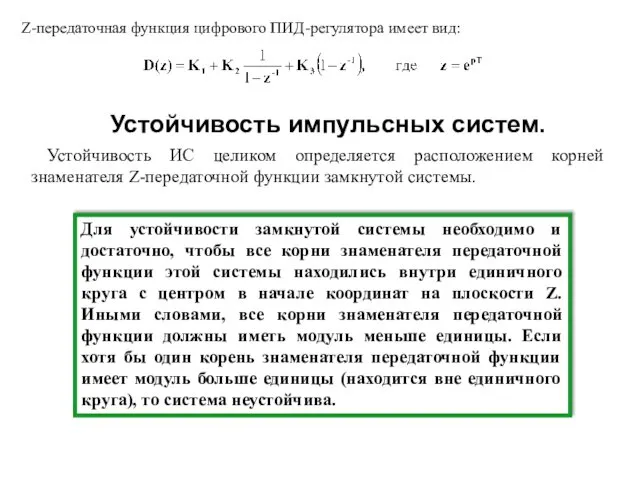
Z-передаточная функция цифрового ПИД-регулятора имеет вид:
Устойчивость импульсных систем.
Устойчивость ИС целиком определяется
Z-передаточная функция цифрового ПИД-регулятора имеет вид:
Устойчивость импульсных систем.
Устойчивость ИС целиком определяется
Методы исследования динамики ИС.
1. Корневой годограф.
Метод корневого годографа одинаков
Методы исследования динамики ИС.
1. Корневой годограф.
Метод корневого годографа одинаков

Критерий Найквиста для импульсных систем.
Для устойчивости замкнутой системы необходимо и достаточно,
Критерий Найквиста для импульсных систем.
Для устойчивости замкнутой системы необходимо и достаточно,
 Портфолио учителя математики
Портфолио учителя математики Рулонные кровельные и гидроизоляционные материалы на основе эластомеров
Рулонные кровельные и гидроизоляционные материалы на основе эластомеров Организм человека и его здоровье
Организм человека и его здоровье Правила игры Мафия
Правила игры Мафия 1 сентября - День знаний
1 сентября - День знаний Из опыта работы с родителями
Из опыта работы с родителями Graffiti
Graffiti Связь деления и умножения
Связь деления и умножения Общественный строй и церковная организация на Руси
Общественный строй и церковная организация на Руси Театральное и цирковое искусство Древнего Рима
Театральное и цирковое искусство Древнего Рима ВПР по биологии 5 класс
ВПР по биологии 5 класс Альбрехт Дюрер (1471 – 1528)
Альбрехт Дюрер (1471 – 1528) Паровая турбина, строение и принцип работы
Паровая турбина, строение и принцип работы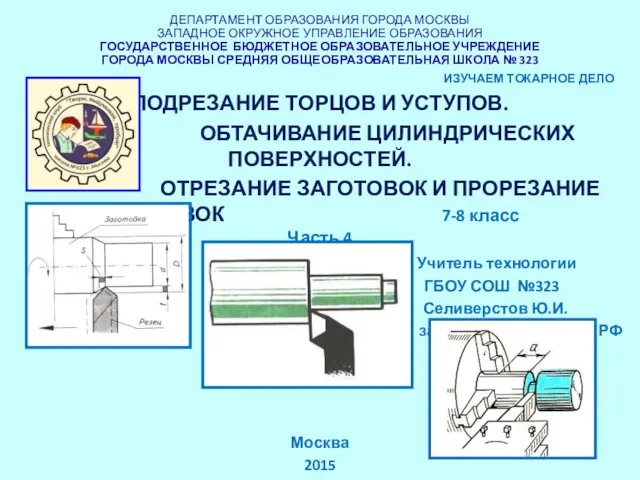 операции подрезания и обтачмванмя
операции подрезания и обтачмванмя Географические исследования на территории Казахстана
Географические исследования на территории Казахстана История спортивных игр
История спортивных игр урок по мордовскому языку
урок по мордовскому языку Атмосферное давление
Атмосферное давление Патология сердечно-сосудистой системы
Патология сердечно-сосудистой системы Презентация История появления газет 3-4 класс
Презентация История появления газет 3-4 класс Техніка безпеки при роботі з комп’ютером. Інформатика як наука та галузь діяльності людини
Техніка безпеки при роботі з комп’ютером. Інформатика як наука та галузь діяльності людини Кальций. Маңызды химиялық формулалар
Кальций. Маңызды химиялық формулалар Єкологія моєї країни
Єкологія моєї країни Железоуглеродистые, легированные и цветные сплавы
Железоуглеродистые, легированные и цветные сплавы ТЭК: Электроэнергетика России
ТЭК: Электроэнергетика России Основы логики и логические основы компьютера
Основы логики и логические основы компьютера Презентация Педагогическая деятельность Пришва Ирины Геннадьевны
Презентация Педагогическая деятельность Пришва Ирины Геннадьевны Уотсон Джон (1878-1958)
Уотсон Джон (1878-1958)