- Механика электропривода

Содержание
- 2. 2.1. Уравнение механического движения Согласно второму закону Ньютона преобразованному для тел вращения: M - Mc =
- 3. Таким образом, динамический момент проявляется и действует только в переходных режимах при ускорении и замедлении электропривода.
- 4. Мощность, которую вращающиеся массы получают при ускорении электропривода или отдают при торможении: (2.3) Тогда динамический момент
- 5. В электроприводе изменение момента инерции наблюдается в механизмах роботов или манипуляторов, в том случае, когда во
- 6. Момент движения в электроприводе обычно обеспечивает электрический двигатель и только в ряде случаев – рабочий орган
- 8. Для удобства рассмотрения процессов, происходящих в электроприводе, одно из двух возможных направлений вращения двигателя считают положительным.
- 10. Скачать презентацию
2.1. Уравнение механического движения
Согласно второму закону Ньютона преобразованному для тел вращения:
M
2.1. Уравнение механического движения
Согласно второму закону Ньютона преобразованному для тел вращения:
M
Таким образом, динамический момент проявляется и действует только в переходных режимах
Таким образом, динамический момент проявляется и действует только в переходных режимах
Мощность, которую вращающиеся массы получают при ускорении электропривода или отдают при
Мощность, которую вращающиеся массы получают при ускорении электропривода или отдают при
В электроприводе изменение момента инерции наблюдается в механизмах роботов или манипуляторов,
В электроприводе изменение момента инерции наблюдается в механизмах роботов или манипуляторов,
Момент движения в электроприводе обычно обеспечивает электрический двигатель и только в
Момент движения в электроприводе обычно обеспечивает электрический двигатель и только в
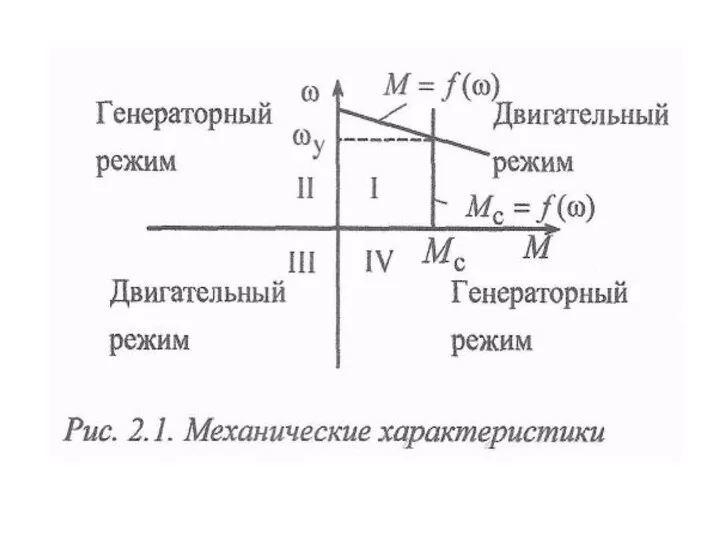
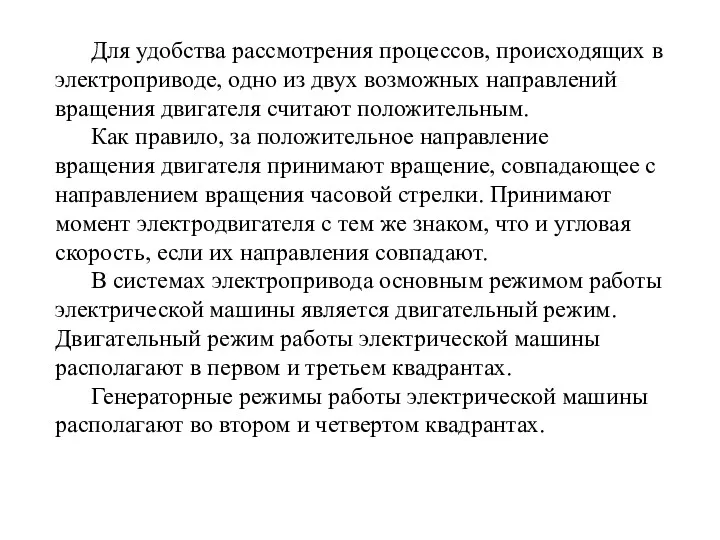
Для удобства рассмотрения процессов, происходящих в электроприводе, одно из двух возможных
Для удобства рассмотрения процессов, происходящих в электроприводе, одно из двух возможных
 Релігія та вірування. Політеїзм. Головні боги Єгипта
Релігія та вірування. Політеїзм. Головні боги Єгипта СПЕШИ ТВОРИТЬ ДОБРО.3 декабря - Международный день инвалидов
СПЕШИ ТВОРИТЬ ДОБРО.3 декабря - Международный день инвалидов Новый порядок аттестации педагогических работников
Новый порядок аттестации педагогических работников Поколения. Взаимоотношение поколений
Поколения. Взаимоотношение поколений Использование вербальных и невербальных средств общения для достижения эффективного взаимодействия
Использование вербальных и невербальных средств общения для достижения эффективного взаимодействия Методическая разработка презентации: Развитие фонематического анализа и синтеза
Методическая разработка презентации: Развитие фонематического анализа и синтеза Пищеварение в тонкой кишке (окончание): гидролиз, всасывание
Пищеварение в тонкой кишке (окончание): гидролиз, всасывание Презентация кабинета
Презентация кабинета Кредиттік оқыту жүйесі
Кредиттік оқыту жүйесі Оплодотворение. Эмбриогенез
Оплодотворение. Эмбриогенез Фотоальбом
Фотоальбом primer_otchet
primer_otchet Город – герой Ленинград
Город – герой Ленинград ОРИЕНТИРОВАНИЕ НА МЕСТНОСТИ. АЗИМУТ.
ОРИЕНТИРОВАНИЕ НА МЕСТНОСТИ. АЗИМУТ. Тема Великой Отечественной войны в советской литературе
Тема Великой Отечественной войны в советской литературе Изображение на координатной плоскости множества решений уравнений и неравенств с двумя переменными и их систем
Изображение на координатной плоскости множества решений уравнений и неравенств с двумя переменными и их систем Покажи свое настроение. Больной друг
Покажи свое настроение. Больной друг Сценарий Мама, папа, я - спортивная семья
Сценарий Мама, папа, я - спортивная семья Процессы прямого получения железа из руд. Производство стали. Производство заготовок
Процессы прямого получения железа из руд. Производство стали. Производство заготовок Водный транспорт. Морской и речной транспорт
Водный транспорт. Морской и речной транспорт Рекомендации для учителей по построению урока с позиций системно-деятельностно подхода
Рекомендации для учителей по построению урока с позиций системно-деятельностно подхода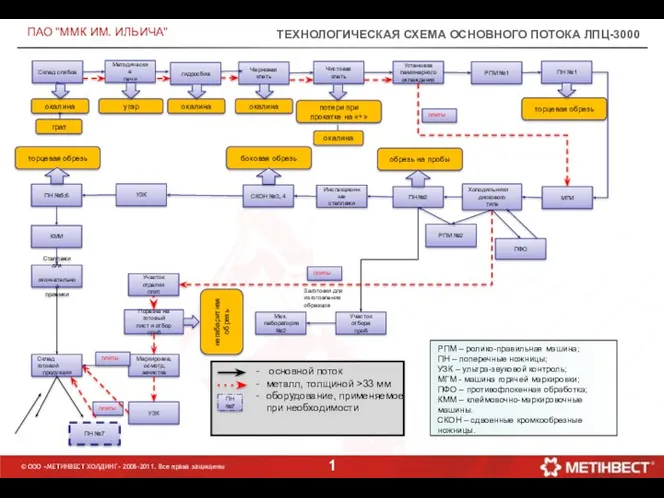 Технологическая схема основного потока ЛПЦ-3000
Технологическая схема основного потока ЛПЦ-3000 Организация семейной творческой выставки Дары осени как условие художественно-эстетического развития детей дошкольного возраста.
Организация семейной творческой выставки Дары осени как условие художественно-эстетического развития детей дошкольного возраста. Среднее арифметическое чисел
Среднее арифметическое чисел Воспитание основ здорового образа жизни у дошкольников
Воспитание основ здорового образа жизни у дошкольников Инкарнационные кресты. Цель уникальности
Инкарнационные кресты. Цель уникальности Презентация 2-й младшей группы Звездочка
Презентация 2-й младшей группы Звездочка Reported Speech in statements
Reported Speech in statements