- Мехатронные модули

Содержание
- 2. Основные понятия и определения Мехатроника - «… область науки и техники, основанная на синергетическом объединении узлов
- 3. Структурная пирамида мехатроники
- 4. Технологическая пирамида мехатроники
- 5. Мехатроника Комбинированные технологии: гибридные технологии электромеханики и мехатроники; цифровые технологии управления движением; технологии автоматизированного проектирования управляемых
- 6. Мехатронные модули Проектирование современных мехатронных систем (МС) основано на модульных принципах и технологиях. Модуль – это
- 7. Классификация мехатронных модулей Информационное устройство
- 8. Классификация мехатронных модулей (продолжение)
- 9. Модули движения Модуль движения (МД) – конструктивно и функционально самостоятельное изделие, в котором конструктивно объединены управляемый
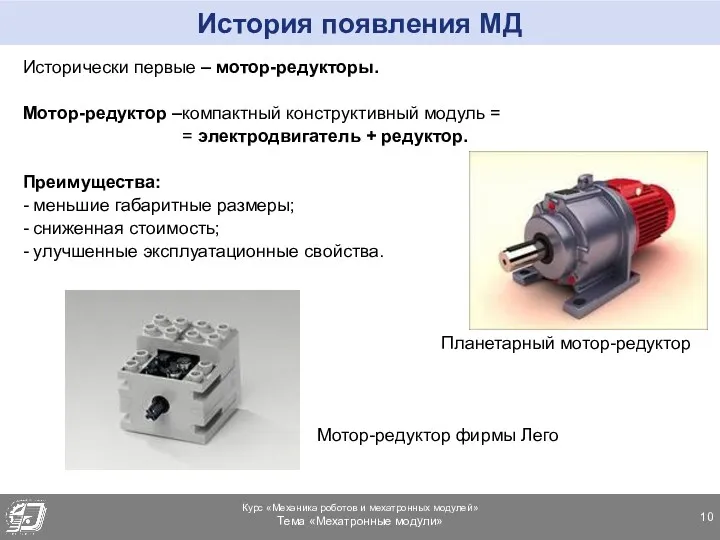
- 10. История появления МД Исторически первые – мотор-редукторы. Мотор-редуктор –компактный конструктивный модуль = = электродвигатель + редуктор.
- 11. Мотор-редукторы Одно-, двух-, трёхступенчатые мотор-редукторы: Цилиндрические; Цилиндро-червячные; Червячные; Планетарные; Волновые; На лапах, фланцевые, с полым валом.
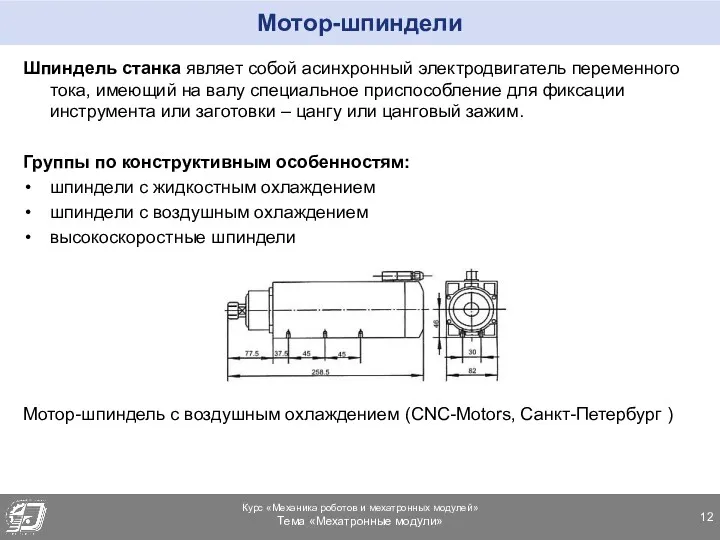
- 12. Мотор-шпиндели Шпиндель станка являет собой асинхронный электродвигатель переменного тока, имеющий на валу специальное приспособление для фиксации
- 13. Мотор-шпиндели (продолжение) .. Мотор-шпиндели с жидкостным охлаждением Высокоскоростной мотор-шпиндель
- 14. Мотор-шпиндели (АМО «ЗиЛ», Москва) Акционерное московское объединение «Завод им. Лихачёва» (2 июля 1916 г.) Электрошпиндели типа
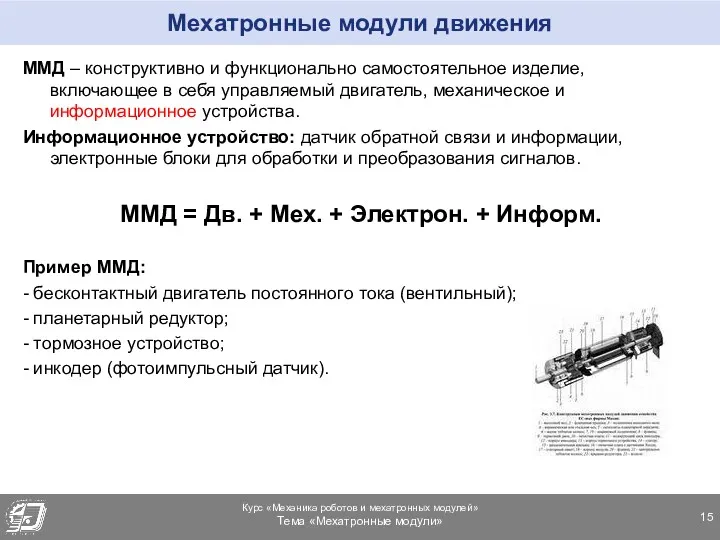
- 15. Мехатронные модули движения ММД – конструктивно и функционально самостоятельное изделие, включающее в себя управляемый двигатель, механическое
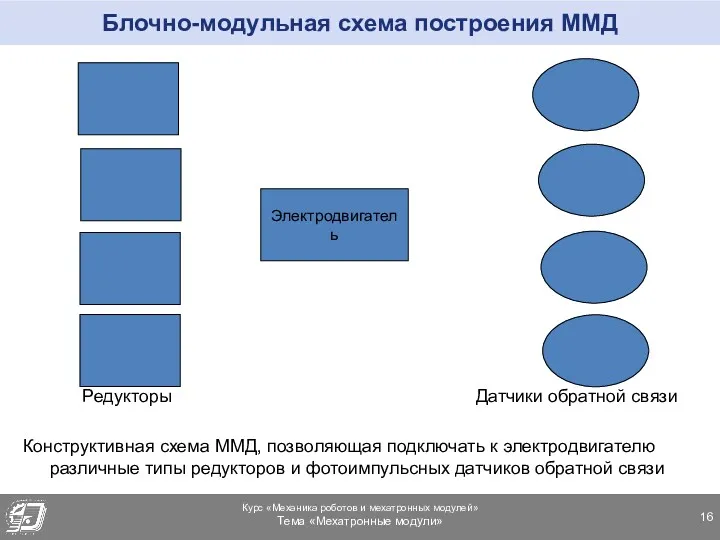
- 16. Блочно-модульная схема построения ММД Редукторы Датчики обратной связи Конструктивная схема ММД, позволяющая подключать к электродвигателю различные
- 17. Интеллектуальные мехатронные модули Интеллектуальные мехатронные модули (ИММ) - конструктивно и функционально самостоятельное изделие, построенное путём синергетической
- 18. Пример ИММ фирмы Siemens ИММ «Simodrive Posmo A» состоят из следующих элементов: - вентильный двигатель с
- 19. Мехатронные машины Мехатронные машины – это интеллектуальные многомерные системы, построенные на мехатронных принципах и технологиях, которые
- 20. Обобщенная структура мехатронных машин
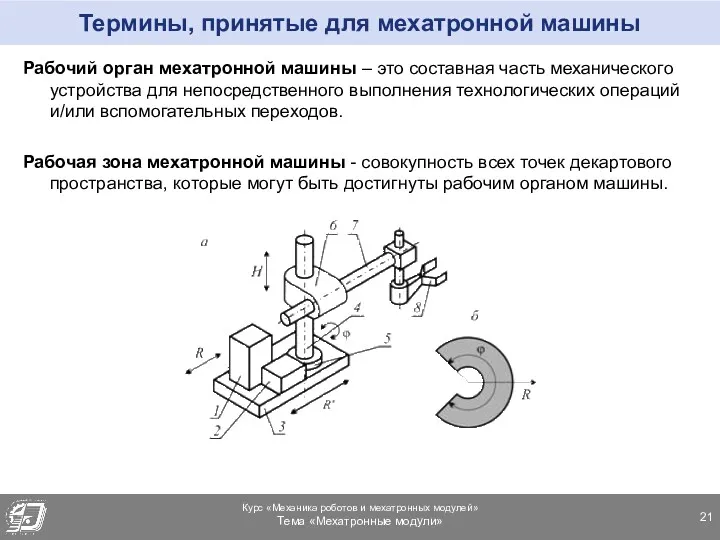
- 21. Термины, принятые для мехатронной машины Рабочий орган мехатронной машины – это составная часть механического устройства для
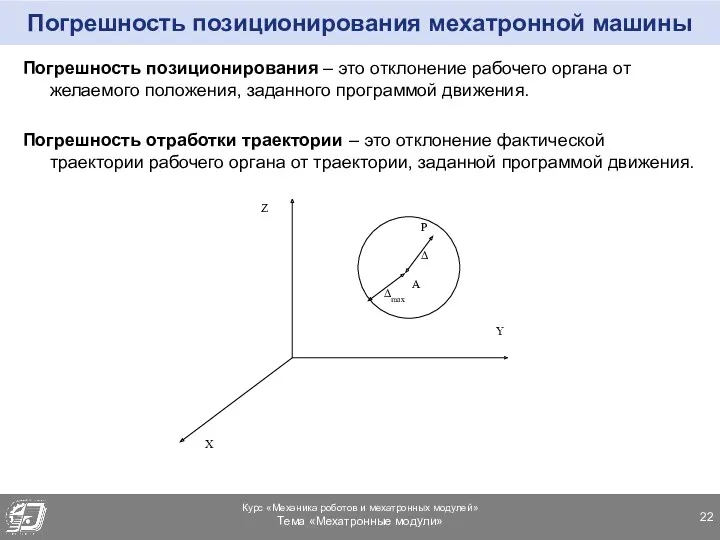
- 22. Погрешность позиционирования мехатронной машины Погрешность позиционирования – это отклонение рабочего органа от желаемого положения, заданного программой
- 23. Мехатронные устройства Признаки мехатронного устройства: 1. Обязательное механическое звено. 2. Минимум преобразований информации. 3. Использование одного
- 24. Современные мехатронные системы 1. Мобильные роботы для инспекции и ремонта подземных трубопроводов Система телеинспекции Rausch ECO-STAR
- 25. Современные мехатронные системы (продолжение) 2. Роботы для телеинспекции серии SUPERVISION Т 3. Робот-миноискатель SIL06
- 26. Современные мехатронные системы (продолжение) 4. Российская боевая робототехника Легкий робототехнический комплекс (РТК) «Клавир» Роботизированный стрелковый комплекс
- 27. Современные мехатронные системы (продолжение) 5. Роботы для пищевой промышленности и сервиса Робот-мороженщик Робот-бармен
- 28. Современные мехатронные системы (продолжение) 6. Системы контроля и стабилизации движения поездов Комплексное локомотивное устройство безопасности (КЛУБ-У)
- 29. Интерфейсы. Мехатронный подход При интеграции элементов в мехатронных модулях и машинах – проектная задача – интерфейсы
- 30. Проблема интерфейсов
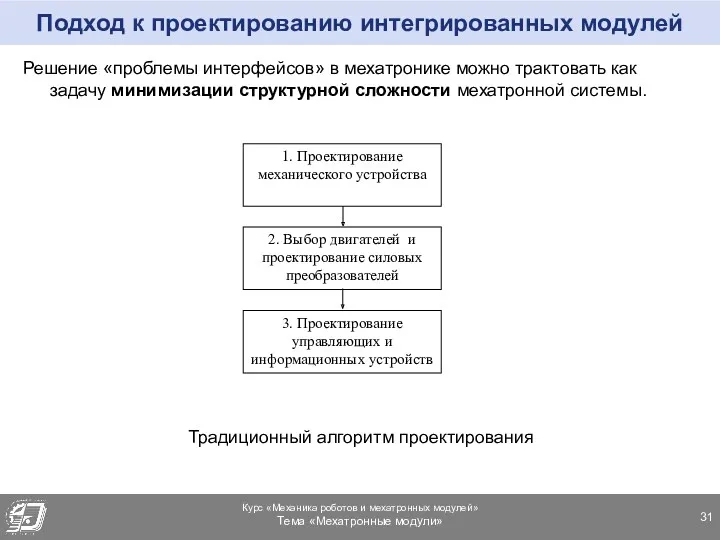
- 31. Подход к проектированию интегрированных модулей Решение «проблемы интерфейсов» в мехатронике можно трактовать как задачу минимизации структурной
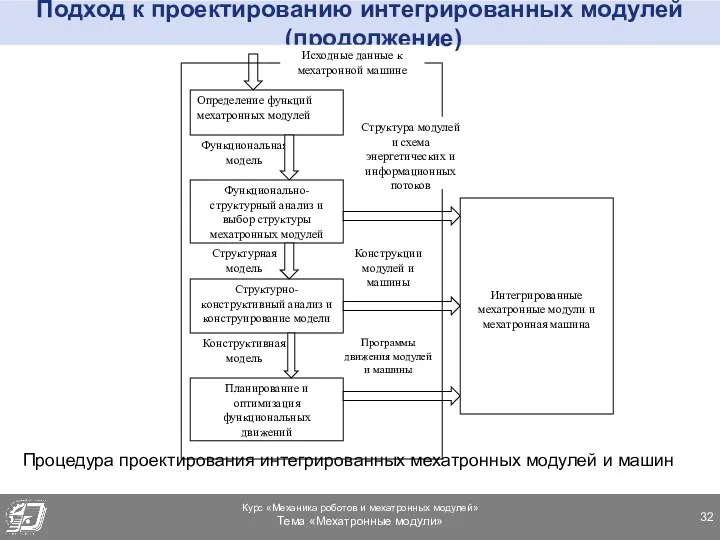
- 32. Подход к проектированию интегрированных модулей (продолжение) Процедура проектирования интегрированных мехатронных модулей и машин
- 33. Заключение Задача мехатроники как науки состоит в интеграции знаний из таких ранее обособленных областей прецизионная механика
- 35. Скачать презентацию
Основные понятия и определения
Мехатроника - «… область науки и техники, основанная
Основные понятия и определения
Мехатроника - «… область науки и техники, основанная

Структурная пирамида мехатроники
Структурная пирамида мехатроники

Технологическая пирамида мехатроники
Технологическая пирамида мехатроники
Мехатроника
Комбинированные технологии:
гибридные технологии электромеханики и мехатроники;
цифровые технологии управления движением;
технологии автоматизированного проектирования
Мехатроника
Комбинированные технологии:
гибридные технологии электромеханики и мехатроники;
цифровые технологии управления движением;
технологии автоматизированного проектирования
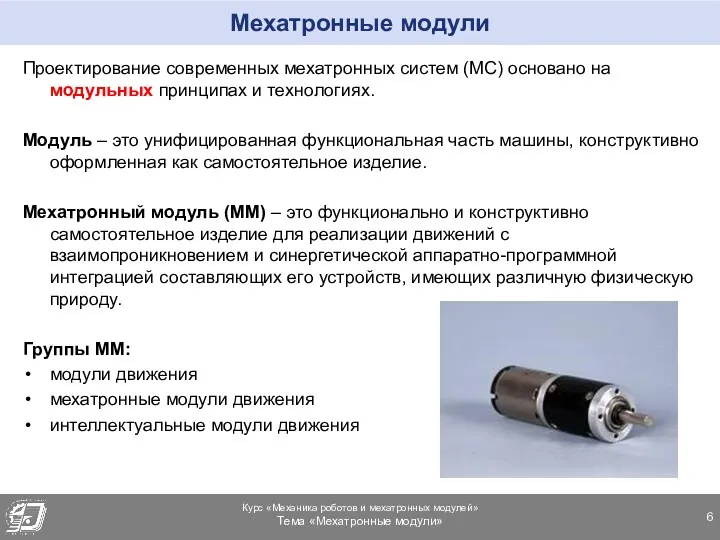
Мехатронные модули
Проектирование современных мехатронных систем (МС) основано на модульных принципах и
Мехатронные модули
Проектирование современных мехатронных систем (МС) основано на модульных принципах и
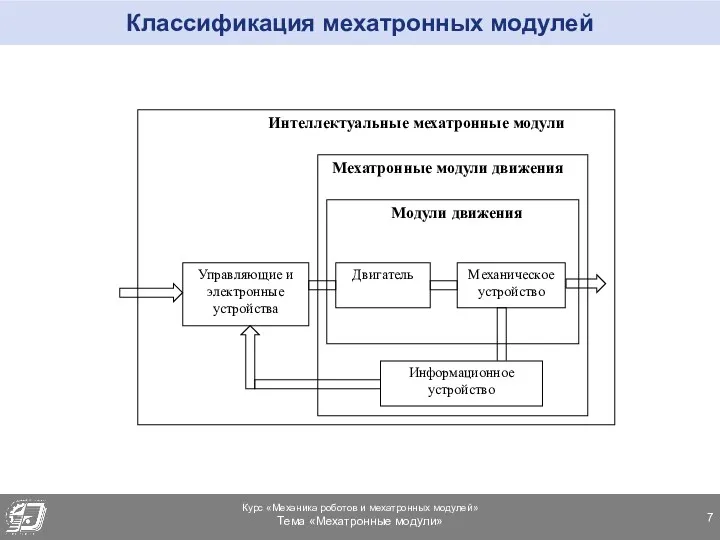
Классификация мехатронных модулей
Информационное устройство
Классификация мехатронных модулей
Информационное устройство

Классификация мехатронных модулей (продолжение)
Классификация мехатронных модулей (продолжение)

Модули движения
Модуль движения (МД) – конструктивно и функционально самостоятельное изделие, в
Модули движения
Модуль движения (МД) – конструктивно и функционально самостоятельное изделие, в
История появления МД
Исторически первые – мотор-редукторы.
Мотор-редуктор –компактный конструктивный модуль =
История появления МД
Исторически первые – мотор-редукторы.
Мотор-редуктор –компактный конструктивный модуль =

Мотор-редукторы
Одно-, двух-, трёхступенчатые мотор-редукторы:
Цилиндрические;
Цилиндро-червячные;
Червячные;
Планетарные;
Волновые;
На лапах, фланцевые, с полым валом.
Фланцевый мотор-редуктор
Мотор-редуктор с
Мотор-редукторы
Одно-, двух-, трёхступенчатые мотор-редукторы:
Цилиндрические;
Цилиндро-червячные;
Червячные;
Планетарные;
Волновые;
На лапах, фланцевые, с полым валом.
Фланцевый мотор-редуктор
Мотор-редуктор с
Мотор-шпиндели
Шпиндель станка являет собой асинхронный электродвигатель переменного тока, имеющий на валу
Мотор-шпиндели
Шпиндель станка являет собой асинхронный электродвигатель переменного тока, имеющий на валу

Мотор-шпиндели (продолжение)
..
Мотор-шпиндели с жидкостным охлаждением
Высокоскоростной мотор-шпиндель
Мотор-шпиндели (продолжение)
..
Мотор-шпиндели с жидкостным охлаждением
Высокоскоростной мотор-шпиндель

Мотор-шпиндели (АМО «ЗиЛ», Москва)
Акционерное московское объединение
«Завод им. Лихачёва» (2 июля
Мотор-шпиндели (АМО «ЗиЛ», Москва)
Акционерное московское объединение
«Завод им. Лихачёва» (2 июля
Мехатронные модули движения
ММД – конструктивно и функционально самостоятельное изделие, включающее в
Мехатронные модули движения
ММД – конструктивно и функционально самостоятельное изделие, включающее в
Блочно-модульная схема построения ММД
Редукторы Датчики обратной связи
Конструктивная схема ММД, позволяющая подключать
Блочно-модульная схема построения ММД
Редукторы Датчики обратной связи
Конструктивная схема ММД, позволяющая подключать

Интеллектуальные мехатронные модули
Интеллектуальные мехатронные модули (ИММ) - конструктивно и функционально самостоятельное
Интеллектуальные мехатронные модули
Интеллектуальные мехатронные модули (ИММ) - конструктивно и функционально самостоятельное

Пример ИММ фирмы Siemens
ИММ «Simodrive Posmo A» состоят из следующих элементов:
-
Пример ИММ фирмы Siemens
ИММ «Simodrive Posmo A» состоят из следующих элементов:
-
Мехатронные машины
Мехатронные машины – это интеллектуальные многомерные системы, построенные на мехатронных
Мехатронные машины
Мехатронные машины – это интеллектуальные многомерные системы, построенные на мехатронных
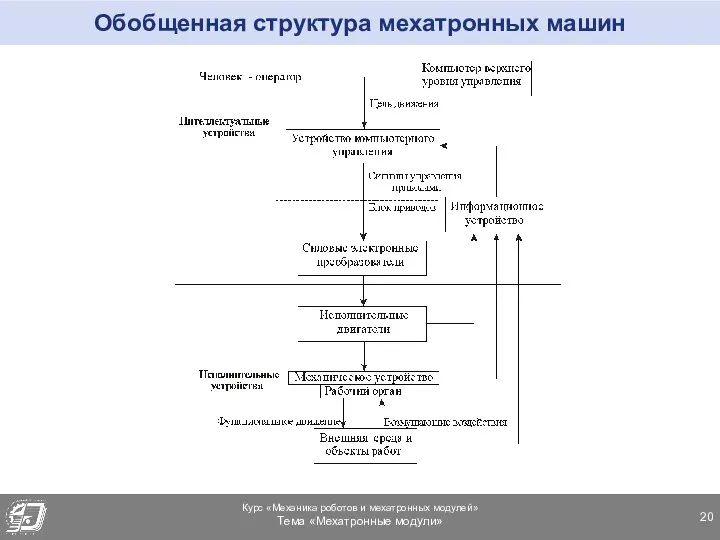
Обобщенная структура мехатронных машин
Обобщенная структура мехатронных машин
Термины, принятые для мехатронной машины
Рабочий орган мехатронной машины – это составная
Термины, принятые для мехатронной машины
Рабочий орган мехатронной машины – это составная
Погрешность позиционирования мехатронной машины
Погрешность позиционирования – это отклонение рабочего органа от
Погрешность позиционирования мехатронной машины
Погрешность позиционирования – это отклонение рабочего органа от

Мехатронные устройства
Признаки мехатронного устройства:
1. Обязательное механическое звено.
2. Минимум преобразований информации.
3. Использование
Мехатронные устройства
Признаки мехатронного устройства:
1. Обязательное механическое звено.
2. Минимум преобразований информации.
3. Использование

Современные мехатронные системы
1. Мобильные роботы для инспекции и ремонта подземных трубопроводов
Система
Современные мехатронные системы
1. Мобильные роботы для инспекции и ремонта подземных трубопроводов
Система

Современные мехатронные системы (продолжение)
2. Роботы для телеинспекции серии SUPERVISION Т
3. Робот-миноискатель
Современные мехатронные системы (продолжение)
2. Роботы для телеинспекции серии SUPERVISION Т
3. Робот-миноискатель

Современные мехатронные системы (продолжение)
4. Российская боевая робототехника
Легкий робототехнический комплекс (РТК) «Клавир»
Роботизированный
Современные мехатронные системы (продолжение)
4. Российская боевая робототехника
Легкий робототехнический комплекс (РТК) «Клавир»
Роботизированный

Современные мехатронные системы (продолжение)
5. Роботы для пищевой промышленности и сервиса
Робот-мороженщик
Робот-бармен
Современные мехатронные системы (продолжение)
5. Роботы для пищевой промышленности и сервиса
Робот-мороженщик
Робот-бармен

Современные мехатронные системы (продолжение)
6. Системы контроля и стабилизации движения поездов
Комплексное
Современные мехатронные системы (продолжение)
6. Системы контроля и стабилизации движения поездов
Комплексное
Интерфейсы. Мехатронный подход
При интеграции элементов в мехатронных модулях и машинах –
Интерфейсы. Мехатронный подход
При интеграции элементов в мехатронных модулях и машинах –
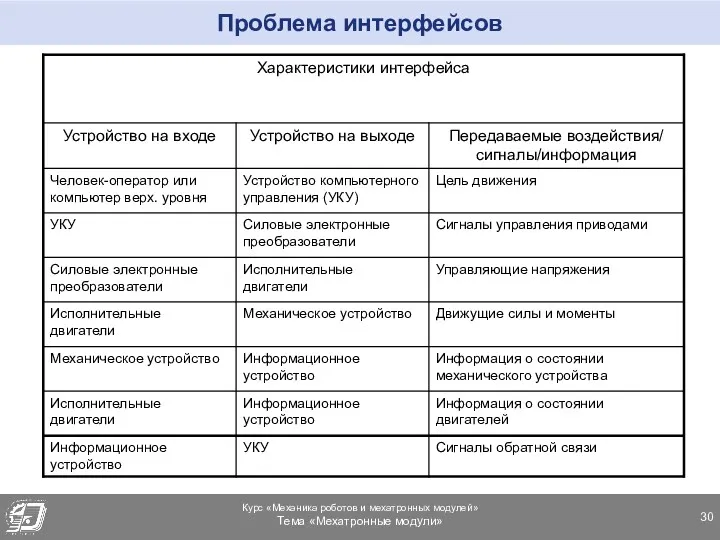
Проблема интерфейсов
Проблема интерфейсов
Подход к проектированию интегрированных модулей
Решение «проблемы интерфейсов» в мехатронике можно трактовать
Подход к проектированию интегрированных модулей
Решение «проблемы интерфейсов» в мехатронике можно трактовать
Подход к проектированию интегрированных модулей
(продолжение)
Процедура проектирования интегрированных мехатронных модулей и машин
Подход к проектированию интегрированных модулей
(продолжение)
Процедура проектирования интегрированных мехатронных модулей и машин
Заключение
Задача мехатроники как науки состоит в интеграции знаний из таких ранее
Заключение
Задача мехатроники как науки состоит в интеграции знаний из таких ранее
 Нарушение водно-электролитного баланса. Расстройства кровообращения
Нарушение водно-электролитного баланса. Расстройства кровообращения Чем гордится Россия
Чем гордится Россия История развития волейбола, основные правила игры
История развития волейбола, основные правила игры Денежная система Германии
Денежная система Германии Конспект индивидуального логопедического занятия Автоматизация звука Р в словах
Конспект индивидуального логопедического занятия Автоматизация звука Р в словах Семья. Традиции. Обычаи. Семейные ценности
Семья. Традиции. Обычаи. Семейные ценности Тест – программа мониторинга уровня физического развития
Тест – программа мониторинга уровня физического развития Лекция 1. Общая характеристика психологии как науки
Лекция 1. Общая характеристика психологии как науки Многоэтажный жилой дом в Екатеринбурге
Многоэтажный жилой дом в Екатеринбурге Викторина. Евангельские сюжеты в искусстве
Викторина. Евангельские сюжеты в искусстве Мониторинг уровня сформированности у детей коммуникативных умений
Мониторинг уровня сформированности у детей коммуникативных умений Особливості окремих складових третинного сектору. Формування інформаційного суспільства
Особливості окремих складових третинного сектору. Формування інформаційного суспільства Дикунов
Дикунов Профилактика передачи ВИЧ-инфекции в работе медицинской сестры
Профилактика передачи ВИЧ-инфекции в работе медицинской сестры Роль семьи в развитии творческих способностей гиперактивных детей дошкольного возраста(презентация)
Роль семьи в развитии творческих способностей гиперактивных детей дошкольного возраста(презентация) Почвы России урок в 8 классе по УМК Алексеева
Почвы России урок в 8 классе по УМК Алексеева Основы логики
Основы логики Электронды техника ќўраушылары. Заттыѕ ќўрылысы туралы негізгі тїсініктер
Электронды техника ќўраушылары. Заттыѕ ќўрылысы туралы негізгі тїсініктер Жалпы гигиена және экология Бөлменің радиациялық фоны.Радон мен оның өнімдерінің гигиеналық маңызы
Жалпы гигиена және экология Бөлменің радиациялық фоны.Радон мен оның өнімдерінің гигиеналық маңызы Риски предприятий, их предупреждение и страхование
Риски предприятий, их предупреждение и страхование Дидактические игры по математике для дошкольников
Дидактические игры по математике для дошкольников Проект:Сохрани свое здоровье сам
Проект:Сохрани свое здоровье сам Христианство: история и современность. Лекция № 12
Христианство: история и современность. Лекция № 12 Danone. Пищевая промышленность. Продукция: молочные продукты, минеральная вода, детское питание
Danone. Пищевая промышленность. Продукция: молочные продукты, минеральная вода, детское питание Походная геометрия
Походная геометрия Оценивание регулятивного компонента деятельности педагогического работника
Оценивание регулятивного компонента деятельности педагогического работника Список художественной литературы, рекомендованной для семейного чтения с учащимися 1 класса
Список художественной литературы, рекомендованной для семейного чтения с учащимися 1 класса Особенности развития архитектуры и дизайна в странах Восточной Европы во второй половине ХХ века
Особенности развития архитектуры и дизайна в странах Восточной Европы во второй половине ХХ века