- Мобильные роботы

Содержание
- 2. Задача – моделирование складского робота в короткие сроки
- 3. Нижний уровень Шасси Навигация Computer vision Распределение обязанностей
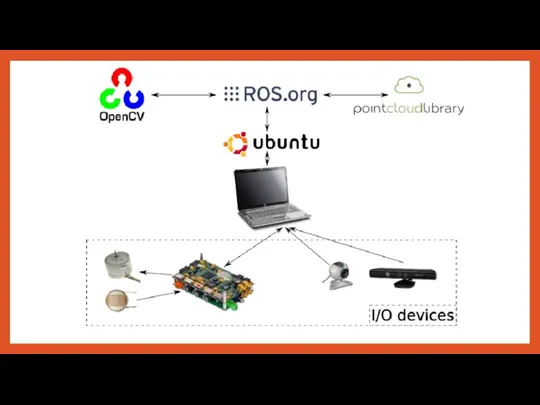
- 4. Стек технологий Нижний уровень Шасси Навигация Computer vision
- 7. Моделирование шасси А Б В Г
- 8. Дифференциальный привод
- 9. Меканум
- 10. Данные
- 11. В каком виде нам приходят запросы скорости?
- 12. Почему Twist?
- 13. Где применяется
- 14. // Блок, выполняемый один раз при старте void setup() { // Задаем режим работы пина 13
- 15. void setup() //Функция setup, вызываемая при старте работы контроллера { pinMode( pin, INPUT/OUTPUT); //Инициализация пина }
- 17. Двигатель Драйвер Контроллер Управление моторами
- 18. Драйвер 1 Драйвер 2 (Инвертирован) En -> 2 En -> 6 (есть не всегда) InA ->
- 19. #define LPWM 5 //Left PWM - управление скоростью левого колеса #define LCCW 4 //Left Counter Clockwise
- 20. void Lmove( int speed) { if (speed >= 0) { digitalWrite(LCW, HIGH); //Выставляем пин "По часовой
- 21. Движение прямо: Энкодеры и ПИД регулятор
- 23. attachInterrupt(interruptPin, function, CHANGE); interruptPin – наш пин прерывания, который реагирует на сигнал function – функция, которая
- 24. #include //Подключаем заголовочный файл библиотеки #define RENCA 11 //Энкодер на правом двигателе. Сигнал A #define RENCB
- 25. void LinterruptFunc() { if (digitalRead(LENCB)) //если сигнал B равен 1 ltickes--; //то вращение против часовой else
- 26. Получение скоростей по энкодерам Диаметр D колеса 82 мм Длина дуги равен Pi*D = 82* Pi
- 27. … int Lvel, Rvel; //скорости правого и левого колес long timer; //таймер, тип long (больше, чем
- 28. //Функции расчета скоростей void Lvelcalc() { /*Скорость равна количеству оборотов за единицу времени * длину дуги
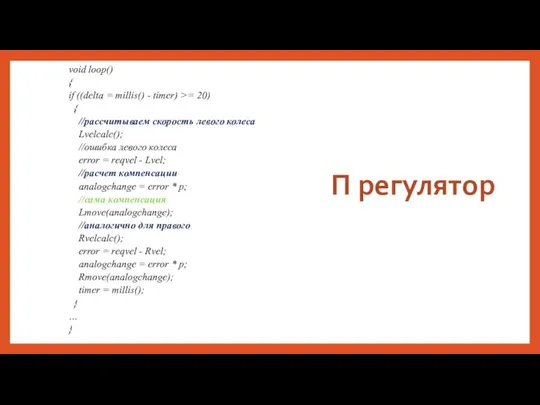
- 29. ПИД регуляторы
- 30. void loop() { if ((delta = millis() - timer) >= 20) { //рассчитываем скорость левого колеса
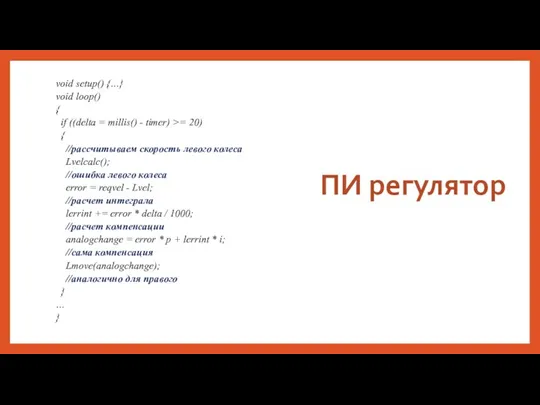
- 31. void setup() {…} void loop() { if ((delta = millis() - timer) >= 20) { //рассчитываем
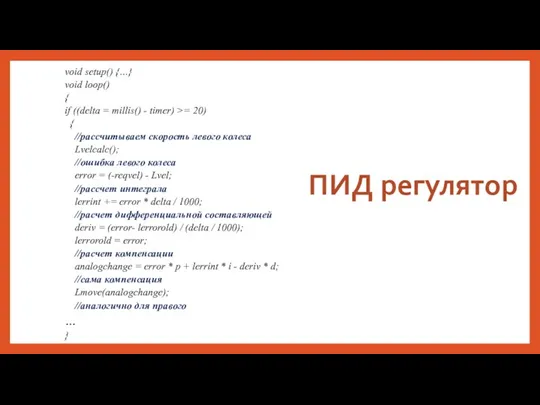
- 32. void setup() {…} void loop() { if ((delta = millis() - timer) >= 20) { //рассчитываем
- 34. Скачать презентацию
Задача – моделирование складского робота в короткие сроки
Задача – моделирование складского робота в короткие сроки

Нижний уровень
Шасси
Навигация
Computer vision
Распределение обязанностей
Нижний уровень
Шасси
Навигация
Computer vision
Распределение обязанностей

Стек технологий
Нижний уровень
Шасси
Навигация
Computer vision
Стек технологий
Нижний уровень
Шасси
Навигация
Computer vision


Моделирование шасси
А
Б
В
Г
Моделирование шасси
А
Б
В
Г

Дифференциальный
привод
Дифференциальный
привод

Меканум
Меканум
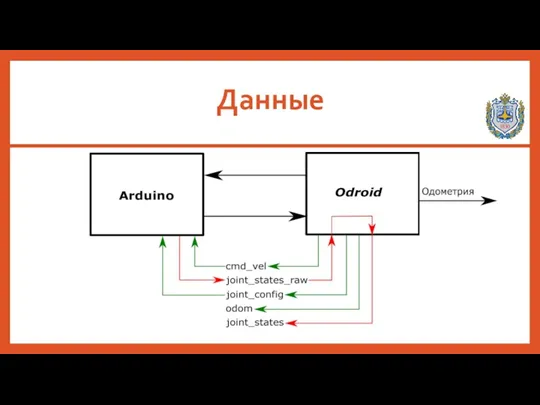
Данные
Данные
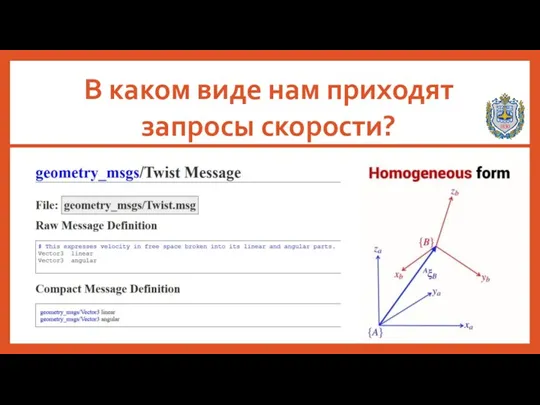
В каком виде нам приходят
запросы скорости?
В каком виде нам приходят
запросы скорости?
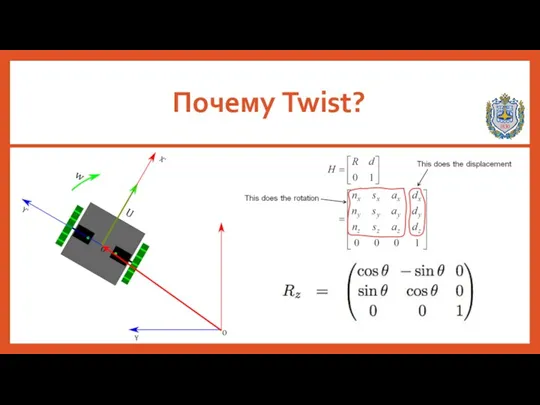
Почему Twist?
Почему Twist?
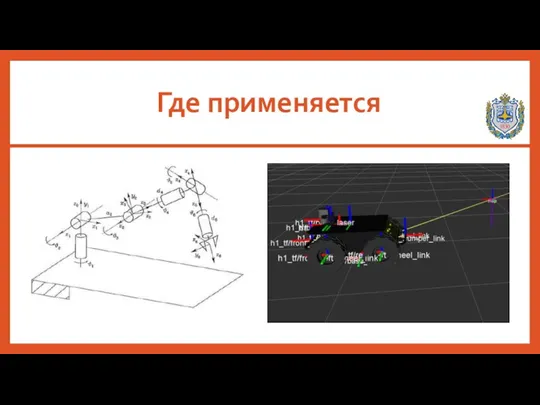
Где применяется
Где применяется
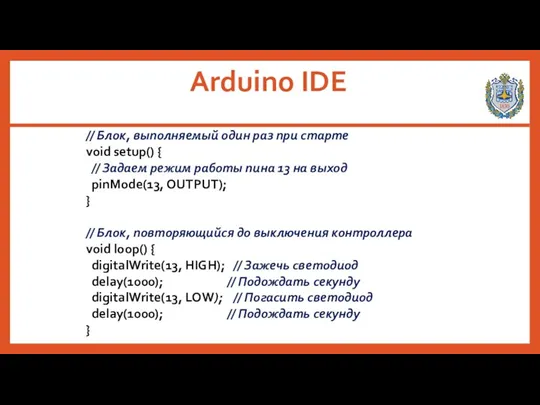
// Блок, выполняемый один раз при старте
void setup() {
// Задаем
// Блок, выполняемый один раз при старте
void setup() {
// Задаем
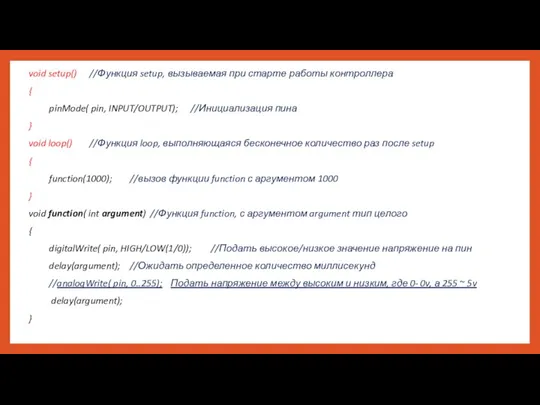
void setup() //Функция setup, вызываемая при старте работы контроллера
{
pinMode( pin, INPUT/OUTPUT); //Инициализация
void setup() //Функция setup, вызываемая при старте работы контроллера
{
pinMode( pin, INPUT/OUTPUT); //Инициализация
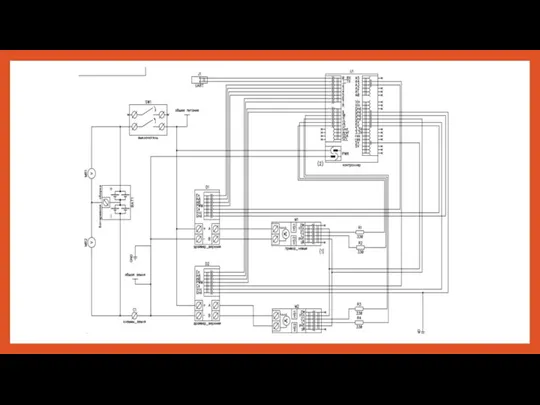

Двигатель
Драйвер
Контроллер
Управление моторами
Двигатель
Драйвер
Контроллер
Управление моторами
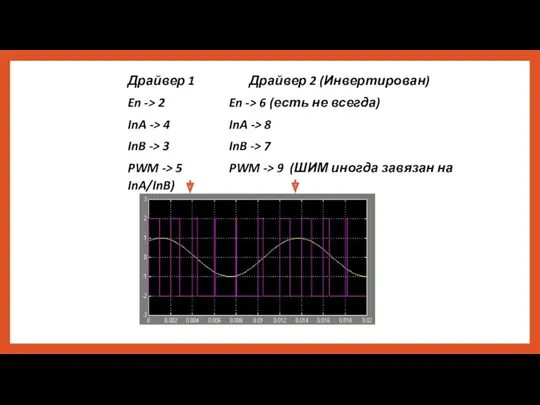
Драйвер 1 Драйвер 2 (Инвертирован)
En -> 2 En -> 6 (есть не всегда)
InA ->
Драйвер 1 Драйвер 2 (Инвертирован)
En -> 2 En -> 6 (есть не всегда)
InA ->
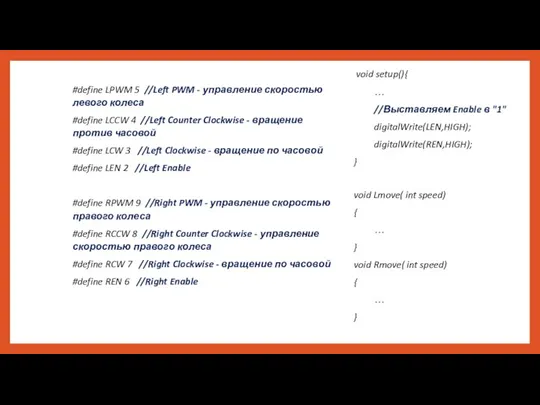
#define LPWM 5 //Left PWM - управление скоростью левого колеса
#define LCCW
#define LPWM 5 //Left PWM - управление скоростью левого колеса
#define LCCW
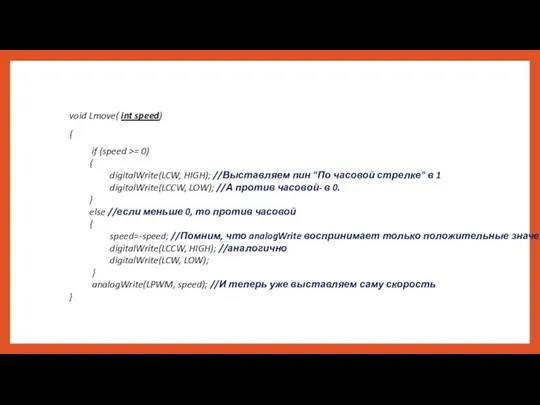
void Lmove( int speed)
{
if (speed >= 0)
{
digitalWrite(LCW, HIGH);
void Lmove( int speed)
{
if (speed >= 0)
{
digitalWrite(LCW, HIGH);

Движение прямо:
Энкодеры и ПИД регулятор
Движение прямо:
Энкодеры и ПИД регулятор
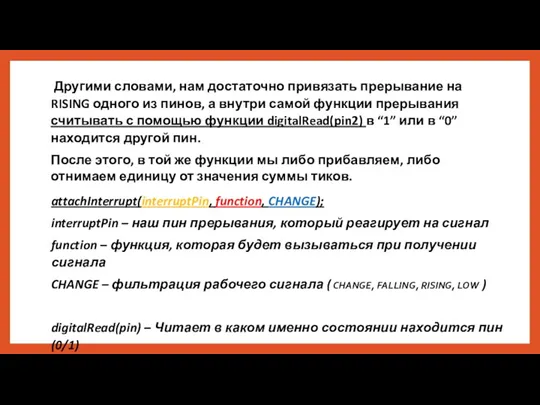
attachInterrupt(interruptPin, function, CHANGE);
interruptPin – наш пин прерывания, который реагирует на сигнал
function
attachInterrupt(interruptPin, function, CHANGE);
interruptPin – наш пин прерывания, который реагирует на сигнал
function
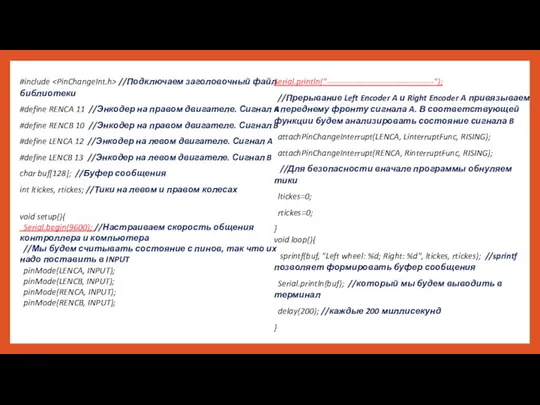
#include //Подключаем заголовочный файл библиотеки
#define RENCA 11 //Энкодер на правом
#include
#define RENCA 11 //Энкодер на правом
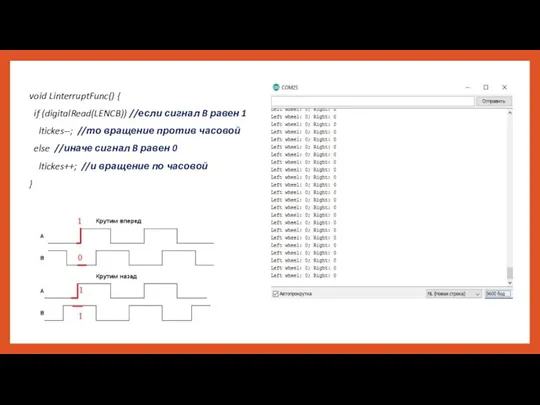
void LinterruptFunc() {
if (digitalRead(LENCB)) //если сигнал B равен 1
ltickes--;
void LinterruptFunc() {
if (digitalRead(LENCB)) //если сигнал B равен 1
ltickes--;
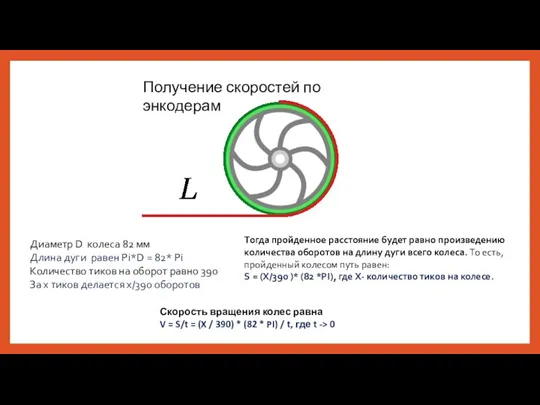
Получение скоростей по энкодерам
Диаметр D колеса 82 мм
Длина дуги равен Pi*D
Получение скоростей по энкодерам
Диаметр D колеса 82 мм
Длина дуги равен Pi*D
…
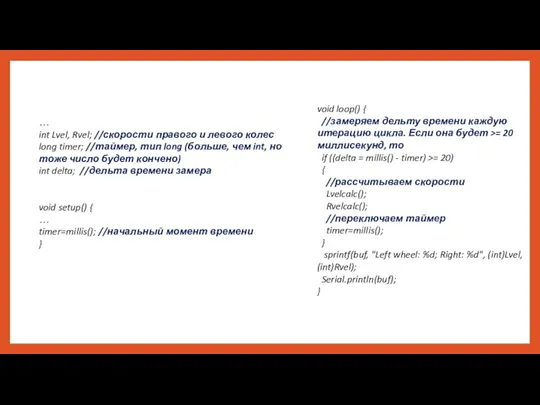
int Lvel, Rvel; //скорости правого и левого колес
long timer; //таймер, тип
…
int Lvel, Rvel; //скорости правого и левого колес
long timer; //таймер, тип
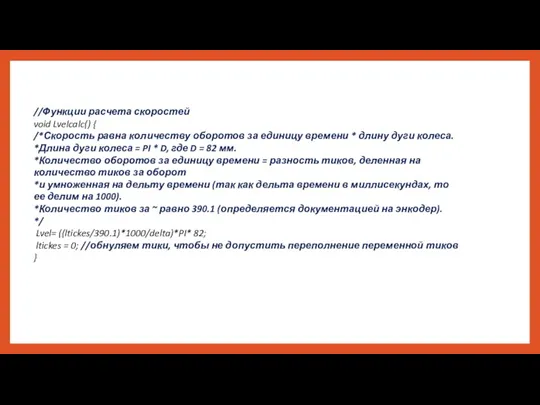
//Функции расчета скоростей
void Lvelcalc() {
/*Скорость равна количеству оборотов за единицу времени
//Функции расчета скоростей
void Lvelcalc() {
/*Скорость равна количеству оборотов за единицу времени
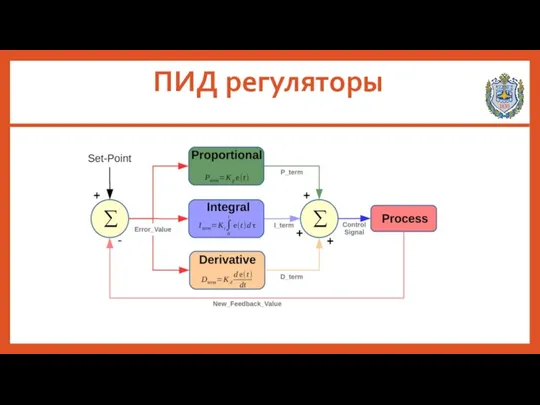
ПИД регуляторы
ПИД регуляторы
void loop()
{
if ((delta = millis() - timer) >= 20)
{
void loop()
{
if ((delta = millis() - timer) >= 20)
{
void setup() {…}
void loop()
{
if ((delta = millis() - timer)
void setup() {…}
void loop()
{
if ((delta = millis() - timer)
void setup() {…}
void loop()
{
if ((delta = millis() - timer) >= 20)
void setup() {…}
void loop()
{
if ((delta = millis() - timer) >= 20)
 Санкт -Петербург
Санкт -Петербург Задачи на совместную работу
Задачи на совместную работу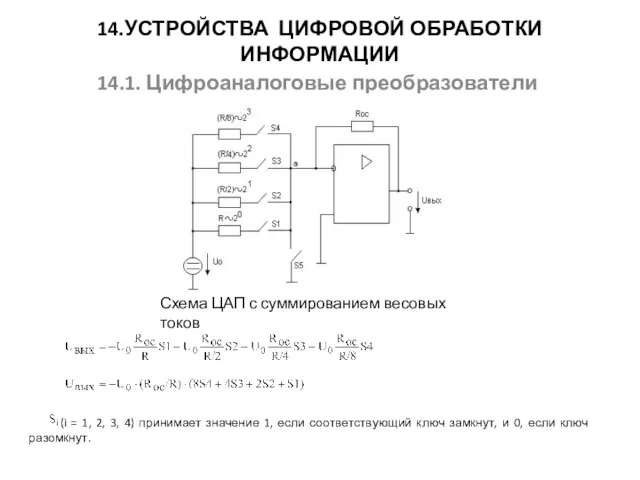 Устройства цифровой обработки информации
Устройства цифровой обработки информации Комплект радіостанції Becker RT6201/RCU6201 на вертольоті та його разміщення
Комплект радіостанції Becker RT6201/RCU6201 на вертольоті та його разміщення Презентации к курсу Химия и питание
Презентации к курсу Химия и питание Предмет, цели и задачи товароведения
Предмет, цели и задачи товароведения М. Зощенко. Золотые слова
М. Зощенко. Золотые слова Разнообразие животных
Разнообразие животных Web-программирование. Лекция 7. HTTP. Django
Web-программирование. Лекция 7. HTTP. Django Афинские школы
Афинские школы Русская наука во второй половине XIX века
Русская наука во второй половине XIX века Создание промышленных предприятий по производству органоминеральных удобрений из осадков сточных вод
Создание промышленных предприятий по производству органоминеральных удобрений из осадков сточных вод Изобразительное творчество дошкольников с точки зрения психологии
Изобразительное творчество дошкольников с точки зрения психологии Профессия – родину защищать
Профессия – родину защищать Тундра
Тундра Мұнай - көмірсутектер қоспасы болып табылатын, жанатын майлы сұйықтық, пайдалы қазбалардың ең маңызды түрі
Мұнай - көмірсутектер қоспасы болып табылатын, жанатын майлы сұйықтық, пайдалы қазбалардың ең маңызды түрі Шляпный этикет, как правильно вписать аксессуар из прошлого в современный образ
Шляпный этикет, как правильно вписать аксессуар из прошлого в современный образ Сутність маркетингу та його сучасна концепція
Сутність маркетингу та його сучасна концепція Психология развития и возрастная психология
Психология развития и возрастная психология Северная война (1700-1721)
Северная война (1700-1721) Природные ресурсы Западно-Сибирской равнины и условия их освоения.
Природные ресурсы Западно-Сибирской равнины и условия их освоения. Устройство шестивесельного яла
Устройство шестивесельного яла Тредмил-тест. Метод функциональной диагностики заболев аний сердечнососудистой системы
Тредмил-тест. Метод функциональной диагностики заболев аний сердечнососудистой системы Чего себе не хочешь, того другим не делай.
Чего себе не хочешь, того другим не делай. Single screw compressor presentation. Working principle & inspection guidelines
Single screw compressor presentation. Working principle & inspection guidelines Фонарик из цветной бумаги и картона
Фонарик из цветной бумаги и картона Эксплуатация нефтяных и газовых скважин. Методы увеличения дебита скважин
Эксплуатация нефтяных и газовых скважин. Методы увеличения дебита скважин Предохранители. Виды предохранителей
Предохранители. Виды предохранителей