- Мобильный робот. Программирование в среде Brick Program

Содержание
- 2. Какие бывают роботы?
- 3. Мобильные роботы Быстрые Маневренные Двигаются по плоскости Реагируют на препятствия
- 4. Наш мобильный робот Мотор B Мотор С Контроллер – мозг робота Датчик расстояния
- 5. Строим мобильный робот - 1
- 6. Строим мобильный робот - 2
- 7. Команды Действия Ожидания «Делай» «Жди»
- 8. Типы команд: «Жди» и «Делай» Команды «Жди» Не выполняют никаких физических действий Останавливают следование программы до
- 9. Программируем EV3 Включите EV3 Найдите Brick Program Составьте программу Запустите программу первым блоком Составьте программу проезда
- 10. Установим датчик препятствия Программа для путешествия по комнате Повторять бесконечно: {ехать вперед, пока впереди не появится
- 11. Какие бывают роботы? ? ? ? ?
- 12. Наш мобильный робот Мотор B Мотор С Контроллер – мозг робота Датчик препятствия ? ? ?
- 14. Скачать презентацию

Какие
бывают
роботы?
Какие
бывают
роботы?

Мобильные роботы
Быстрые
Маневренные
Двигаются по плоскости
Реагируют на препятствия
Мобильные роботы
Быстрые
Маневренные
Двигаются по плоскости
Реагируют на препятствия

Наш мобильный робот
Мотор B
Мотор С
Контроллер –
мозг робота
Датчик
расстояния
Наш мобильный робот
Мотор B
Мотор С
Контроллер –
мозг робота
Датчик
расстояния
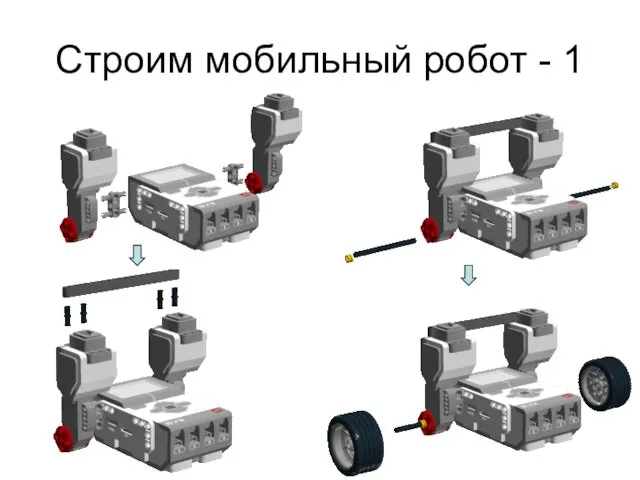
Строим мобильный робот - 1
Строим мобильный робот - 1

Строим мобильный робот - 2
Строим мобильный робот - 2
Команды
Действия Ожидания
«Делай» «Жди»
Команды
Действия Ожидания
«Делай» «Жди»
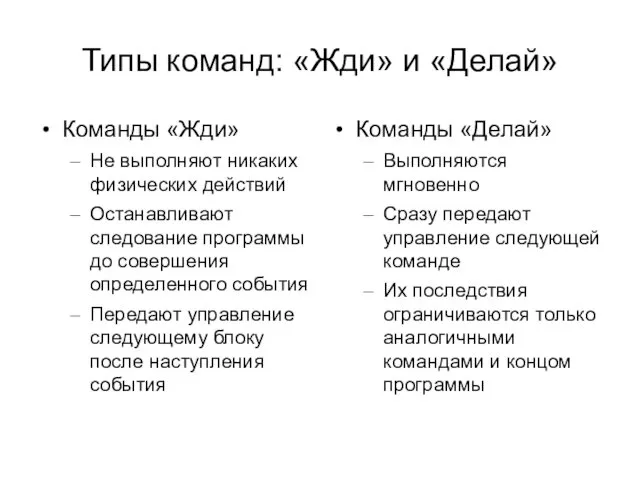
Типы команд: «Жди» и «Делай»
Команды «Жди»
Не выполняют никаких физических действий
Останавливают следование
Типы команд: «Жди» и «Делай»
Команды «Жди»
Не выполняют никаких физических действий
Останавливают следование
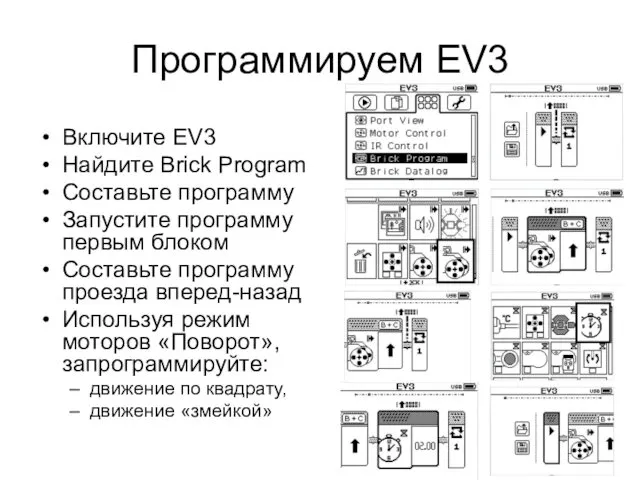
Программируем EV3
Включите EV3
Найдите Brick Program
Составьте программу
Запустите программу первым блоком
Составьте программу проезда
Программируем EV3
Включите EV3
Найдите Brick Program
Составьте программу
Запустите программу первым блоком
Составьте программу проезда
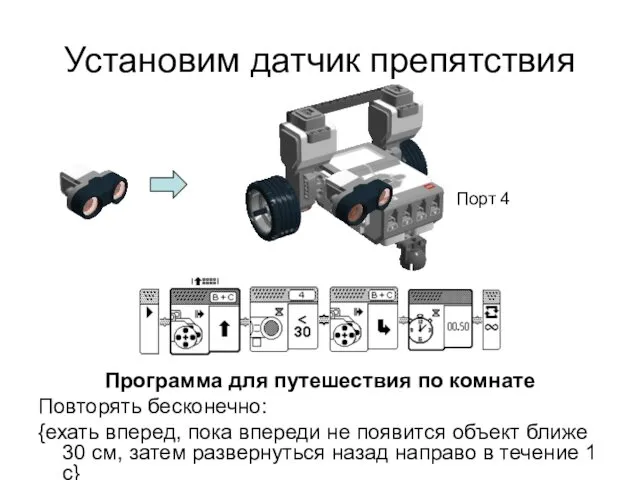
Установим датчик препятствия
Программа для путешествия по комнате
Повторять бесконечно:
{ехать вперед, пока
Установим датчик препятствия
Программа для путешествия по комнате
Повторять бесконечно:
{ехать вперед, пока

Какие
бывают
роботы?
?
?
?
?
Какие
бывают
роботы?
?
?
?
?

Наш мобильный робот
Мотор B
Мотор С
Контроллер –
мозг робота
Датчик
препятствия
?
?
? ?
Наш мобильный робот
Мотор B
Мотор С
Контроллер –
мозг робота
Датчик
препятствия
?
?
? ?
 Этика государственного служащего
Этика государственного служащего Творческий проектСказка про реку
Творческий проектСказка про реку Оформление кабинета начальных классов к Новому году
Оформление кабинета начальных классов к Новому году Коррозия железа и его сплавов в различных средах
Коррозия железа и его сплавов в различных средах Управление научной, научно-технической, инновационной деятельностью РК
Управление научной, научно-технической, инновационной деятельностью РК Числа 3 и 8 (1 класс)
Числа 3 и 8 (1 класс) Дизайн-проект интерьера квартиры в элитном квартале “Сады Пекина”
Дизайн-проект интерьера квартиры в элитном квартале “Сады Пекина”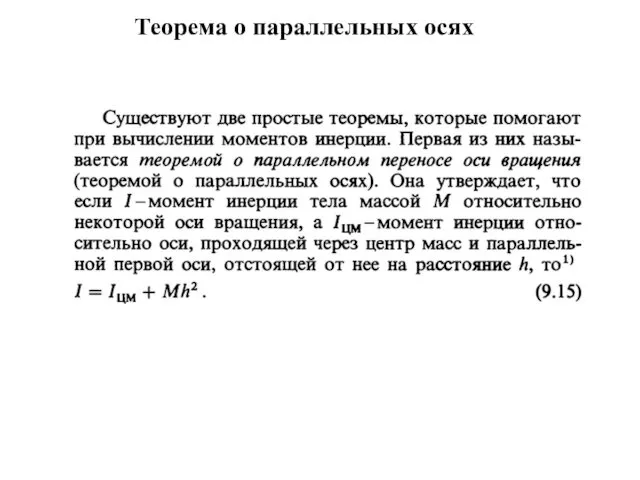 Теорема о параллельных осях
Теорема о параллельных осях Рекламные концепции
Рекламные концепции Скульптура, живопись и прикладное искусство Древнего Рима
Скульптура, живопись и прикладное искусство Древнего Рима Интеллектуально-познавательная краеведческая игра, посвященная юбилейным датам Вологодской области
Интеллектуально-познавательная краеведческая игра, посвященная юбилейным датам Вологодской области Конспект НОД по формированию основ экологической культуры для второй младшей группы: Есть чудесная водица
Конспект НОД по формированию основ экологической культуры для второй младшей группы: Есть чудесная водица Неолитическая революция и появление производящего хозяйства
Неолитическая революция и появление производящего хозяйства Сюжетно-ролевая игра В магазине
Сюжетно-ролевая игра В магазине Волшебство бумажных полосок
Волшебство бумажных полосок Реализация принципов личностно-ориентированного обучения в работе с одаренными детьми.
Реализация принципов личностно-ориентированного обучения в работе с одаренными детьми. Планирование и организация эксперимента
Планирование и организация эксперимента Как менялось жилище человека. Воспитатель: Корелякова О.Е
Как менялось жилище человека. Воспитатель: Корелякова О.Е Воспитательные технологии
Воспитательные технологии Палитра. Цвета
Палитра. Цвета Культура стран халифата
Культура стран халифата Vibration
Vibration Городское благоустройство. Система водостоков
Городское благоустройство. Система водостоков Презентация проекта Откроем мир друг другу
Презентация проекта Откроем мир друг другу Сүзгілер
Сүзгілер ТНУ в схемах ПГУ. Опыт использования ТНУ для теплоснабжения
ТНУ в схемах ПГУ. Опыт использования ТНУ для теплоснабжения Формула успеха лидера
Формула успеха лидера Кировское областное государственное бюджетное учреждение здравоохранения Свечинская центральная районная больница
Кировское областное государственное бюджетное учреждение здравоохранения Свечинская центральная районная больница