- Моделирование и расчет электропривода мостового крана грузоподъемностью 200 кН

Содержание
- 2. Изучение и освоение одной из методик проектирования и моделирования электропривода мостового крана; Предварительный выбор электродвигателя; Уточненный
- 3. Объект модернизации Объектом модернизации является электропривод мостового крана грузоподъёмностью 200 кН
- 4. Мостовой кран представляет собой разновидность подъемного крана, имеет конструкцию, выполненную в виде опорного или подвесного моста.
- 5. ВКР выполнена в текстовом редакторе Microsoft Word 2010, статическом редакторе Microsoft Excel 2010. Система трехмерного моделирования-КОМПАС-3D.Имитационное
- 6. 1. Грузоподъемность лебедки ………………………………………….G1 =200 кН 2. Масса грузозахватного механизма …………………………………G0=10,5 КН 3. Диаметр барабана …………………………………………………….D=0.5
- 7. Кинематическая схема подъемного механизма 1 – асинхроный двигатель; 2 – редуктор; 3 – барабан; 4 –
- 8. Технические данные асинхронного электродвигателя типа 4МТН280S6
- 9. Нагрузочная диаграмма
- 10. Рабочие статические механические характеристики двигателя
- 11. Пусковая диаграмма
- 12. Характеристики переходных процессов M=ƒ(t); I=ƒ(t); ω=ƒ(t).
- 13. Описание программы MATLAB Simulink и используемых элементов Matlab представляет собой комплексный программный пакет для численного анализа.
- 14. Результаты моделирования асинхронного двигателя Рисунок 4.22 – Изменение тока ротора фаз А,В,С;
- 15. Рисунок 4.23 - Изменение тока статора фаз А,В,С;
- 16. Рисунок 4.24 – Изменение скорости;
- 17. Рисунок 4.25 – Изменение электромагнитного момента.
- 19. Скачать презентацию
Изучение и освоение одной из методик проектирования и моделирования электропривода мостового
Изучение и освоение одной из методик проектирования и моделирования электропривода мостового
Объект модернизации
Объектом модернизации является электропривод мостового крана грузоподъёмностью 200 кН
Объект модернизации
Объектом модернизации является электропривод мостового крана грузоподъёмностью 200 кН
Мостовой кран представляет собой разновидность подъемного крана, имеет конструкцию, выполненную в
ВКР выполнена в текстовом редакторе Microsoft Word 2010, статическом редакторе Microsoft
ВКР выполнена в текстовом редакторе Microsoft Word 2010, статическом редакторе Microsoft
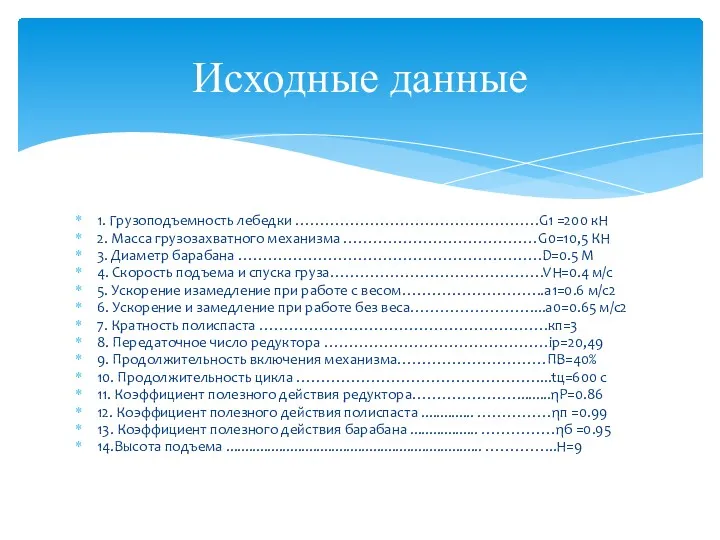
1. Грузоподъемность лебедки ………………………………………….G1 =200 кН
2. Масса грузозахватного механизма …………………………………G0=10,5 КН
3.
1. Грузоподъемность лебедки ………………………………………….G1 =200 кН
2. Масса грузозахватного механизма …………………………………G0=10,5 КН
3.

Кинематическая схема подъемного механизма
1 – асинхроный двигатель; 2 – редуктор; 3
Кинематическая схема подъемного механизма
1 – асинхроный двигатель; 2 – редуктор; 3

Технические данные асинхронного электродвигателя типа 4МТН280S6
Технические данные асинхронного электродвигателя типа 4МТН280S6

Нагрузочная диаграмма
Нагрузочная диаграмма
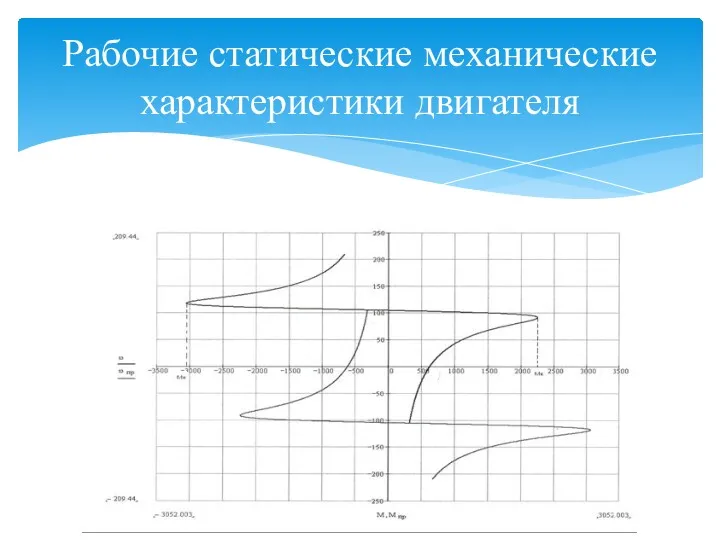
Рабочие статические механические характеристики двигателя
Рабочие статические механические характеристики двигателя
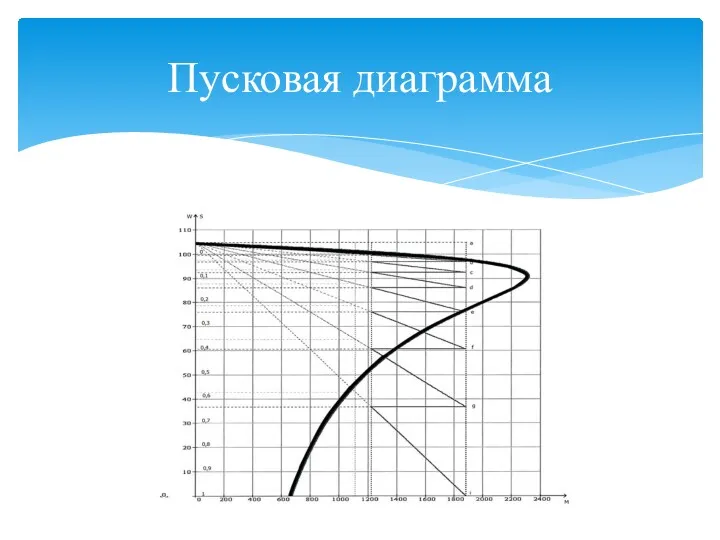
Пусковая диаграмма
Пусковая диаграмма
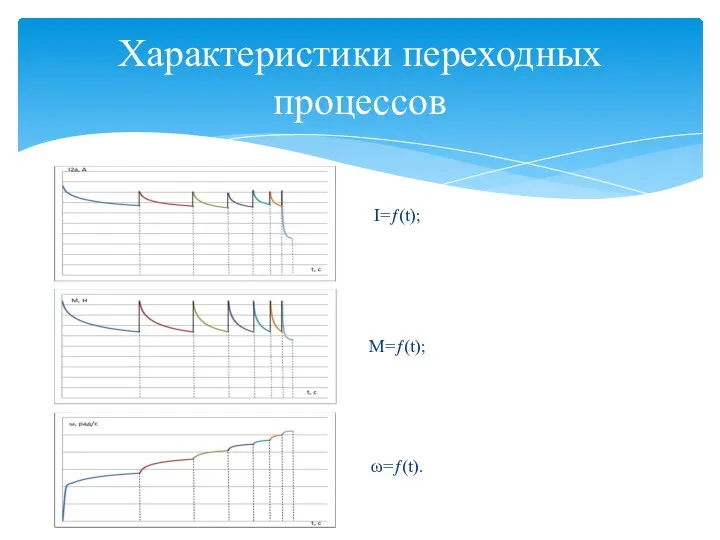
Характеристики переходных процессов
M=ƒ(t);
I=ƒ(t);
ω=ƒ(t).
Характеристики переходных процессов
M=ƒ(t);
I=ƒ(t);
ω=ƒ(t).
Описание программы MATLAB Simulink и используемых элементов
Matlab представляет собой комплексный
Описание программы MATLAB Simulink и используемых элементов
Matlab представляет собой комплексный
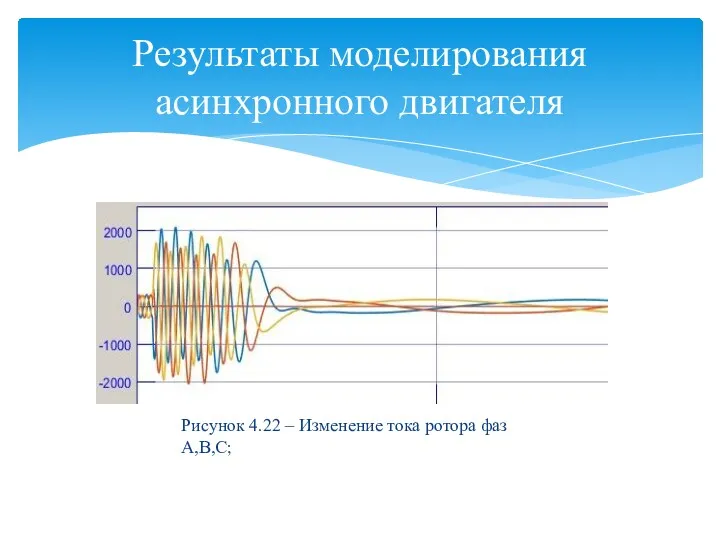
Результаты моделирования асинхронного двигателя
Рисунок 4.22 – Изменение тока ротора фаз
Результаты моделирования асинхронного двигателя
Рисунок 4.22 – Изменение тока ротора фаз
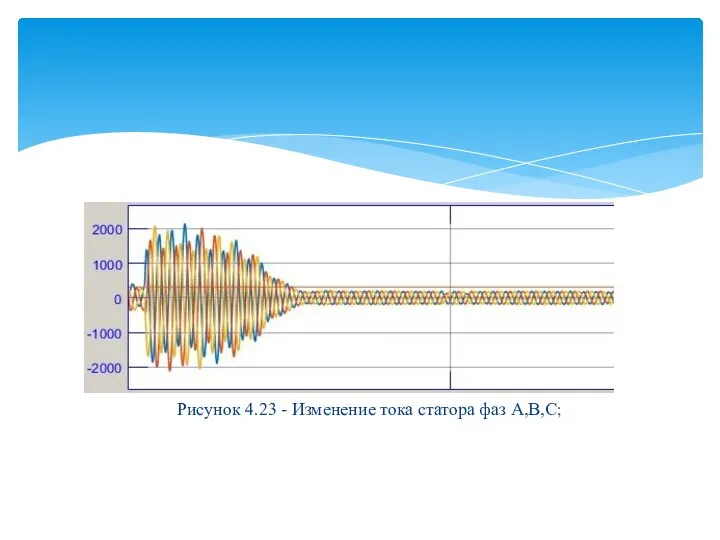
Рисунок 4.23 - Изменение тока статора фаз А,В,С;
Рисунок 4.23 - Изменение тока статора фаз А,В,С;
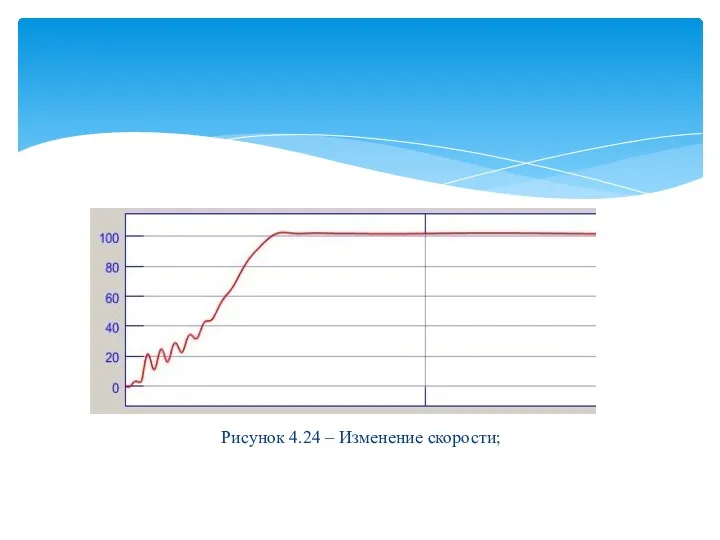
Рисунок 4.24 – Изменение скорости;
Рисунок 4.24 – Изменение скорости;
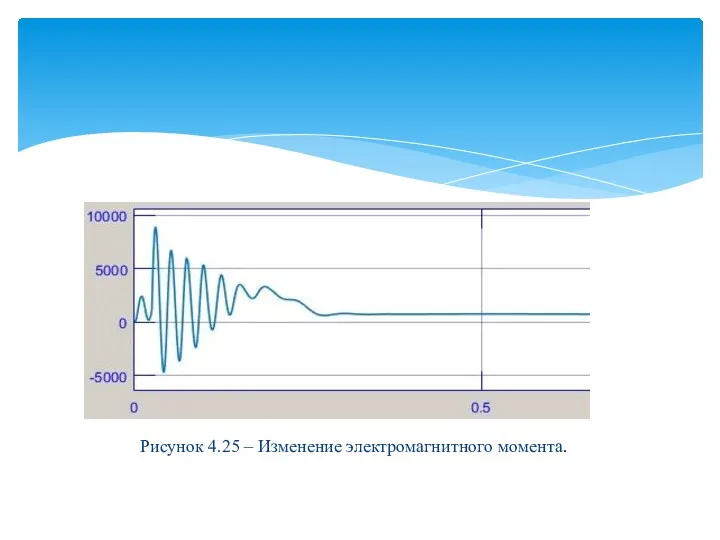
Рисунок 4.25 – Изменение электромагнитного момента.
Рисунок 4.25 – Изменение электромагнитного момента.
 С днем мамы
С днем мамы Семья пастора
Семья пастора Комплексные числа
Комплексные числа ФГОС в дошкольном образовании
ФГОС в дошкольном образовании Пластиковые окна или старые деревянные
Пластиковые окна или старые деревянные Битва под Сталинградом
Битва под Сталинградом Устный журнал Путешествие по планете Памяти
Устный журнал Путешествие по планете Памяти Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.3)
Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.3) Саванны. Субэкваториальный климатический пояс
Саванны. Субэкваториальный климатический пояс Воспитательная система класса
Воспитательная система класса Презентация Семья и школа в формировании личности ребенка
Презентация Семья и школа в формировании личности ребенка Clothes and Fashion
Clothes and Fashion Ограничение облучения от природных источников
Ограничение облучения от природных источников Презентация к викторине У сказки тихий голосок.
Презентация к викторине У сказки тихий голосок. Сюжетно-ролевая игра
Сюжетно-ролевая игра Мастер моего села
Мастер моего села Блиц-опрос Я знаю лес
Блиц-опрос Я знаю лес Концепция педагогической деятельности
Концепция педагогической деятельности System administracji publicznej w Hondurasie
System administracji publicznej w Hondurasie GP USB DownLoad Manual (English_Version)
GP USB DownLoad Manual (English_Version)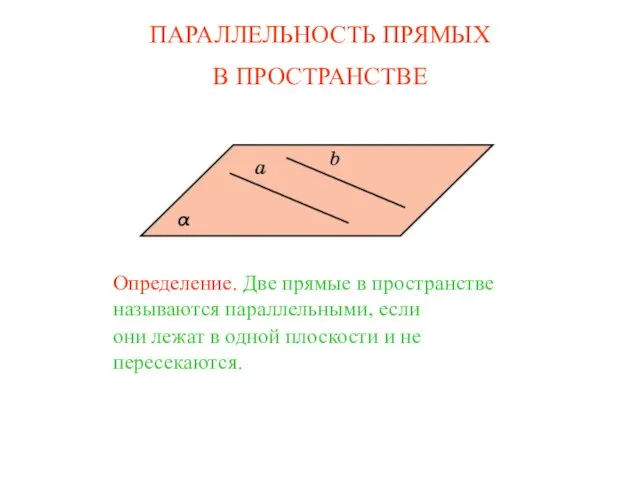 Параллельность прямых в пространстве
Параллельность прямых в пространстве Хранение дел организации. (Тема 4)
Хранение дел организации. (Тема 4) Формирование комфортной городской среды
Формирование комфортной городской среды PML30_SummerPractice2022_Presentation_Pattern
PML30_SummerPractice2022_Presentation_Pattern Декоративный пейзаж
Декоративный пейзаж Пищевая сода. Необычное в обычном
Пищевая сода. Необычное в обычном Как научить своего ребёнка жить в мире людей. Уроки этики поведения для детей и родителей
Как научить своего ребёнка жить в мире людей. Уроки этики поведения для детей и родителей Выдающиеся открытия в области химии
Выдающиеся открытия в области химии