- Моделювання динамічних систем

Содержание
- 2. Лекція 2. Динамічні системи. Моделювання динамічних систем Види динамічних систем Дисипативні Відкриті (активні) Неінтегровні (еволюційні) «Життя
- 3. Лекція 2. Динамічні системи. Моделювання динамічних систем Динамічна система це будь-який об’єкт, чи процес (фізичний, хімічний,
- 4. Лекція 2. Динамічні системи. Моделювання динамічних систем Успіх розв’язування більшості задач механіки забезпечується вдалим вибором системи
- 5. Лекція 2. Види динамічних систем. Моделювання динамічних систем Інтегровні (оборотні) системи Фундаментальні закони класичної механіки Ньютона
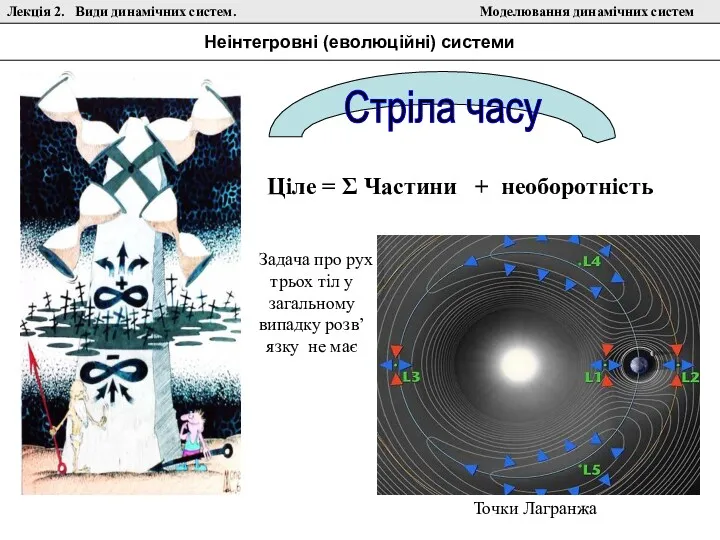
- 6. Лекція 2. Види динамічних систем. Моделювання динамічних систем Неінтегровні (еволюційні) системи Задача про рух трьох тіл
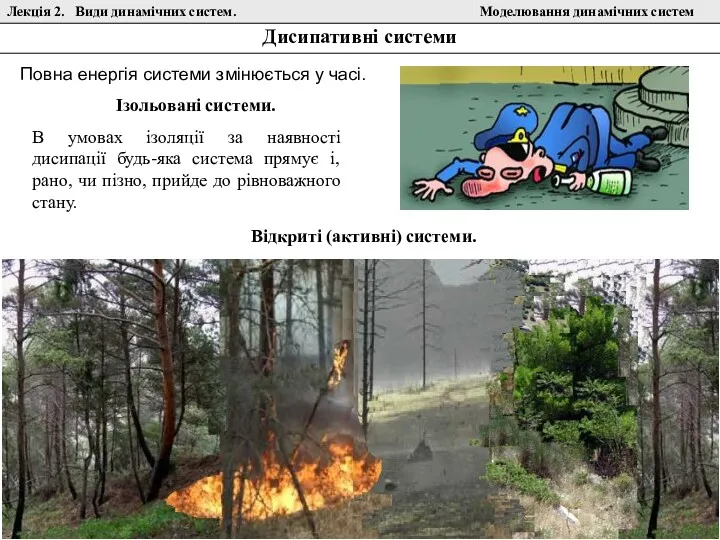
- 7. Лекція 2. Види динамічних систем. Моделювання динамічних систем Дисипативні системи Ізольовані системи. Повна енергія системи змінюється
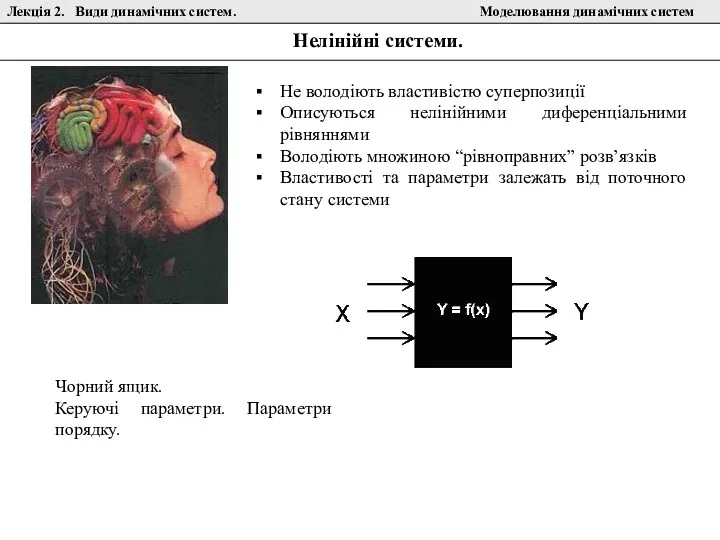
- 8. Лекція 2. Види динамічних систем. Моделювання динамічних систем Нелінійні системи. Чорний ящик. Керуючі параметри. Параметри порядку.
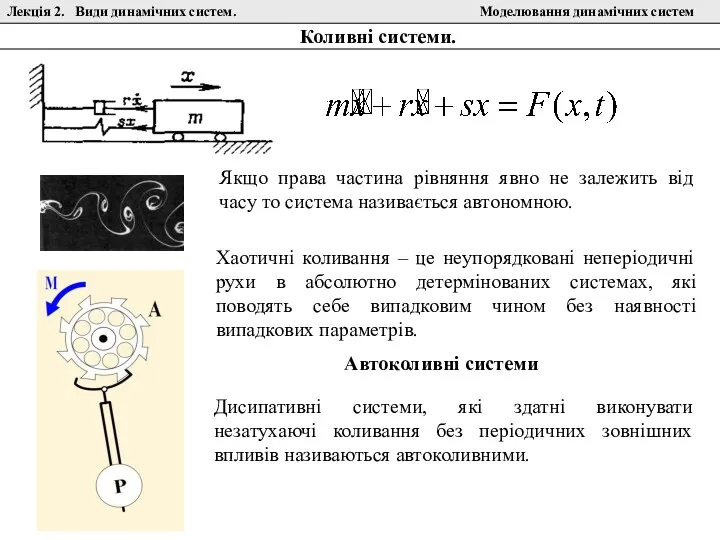
- 9. Лекція 2. Види динамічних систем. Моделювання динамічних систем Коливні системи. Автоколивні системи Хаотичні коливання – це
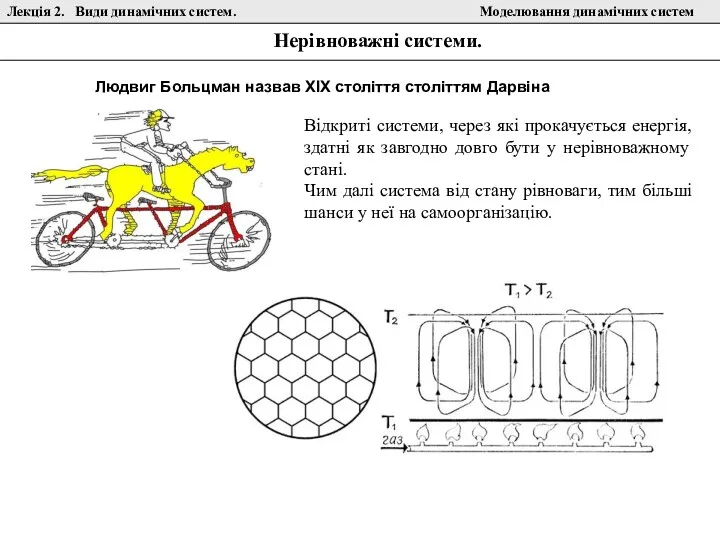
- 10. Лекція 2. Види динамічних систем. Моделювання динамічних систем Нерівноважні системи. Відкриті системи, через які прокачується енергія,
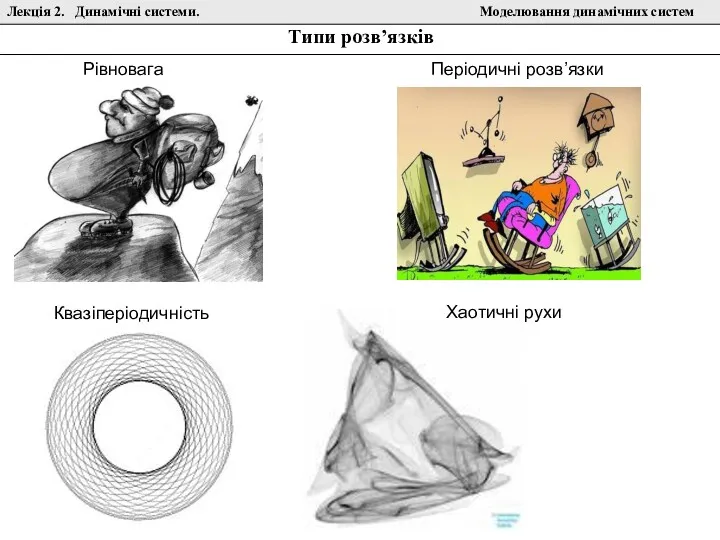
- 11. Лекція 2. Динамічні системи. Моделювання динамічних систем Рівновага Типи розв’язків Періодичні розв’язки Квазіперіодичність Хаотичні рухи
- 13. Скачать презентацию
Лекція 2. Динамічні системи.
Моделювання динамічних систем
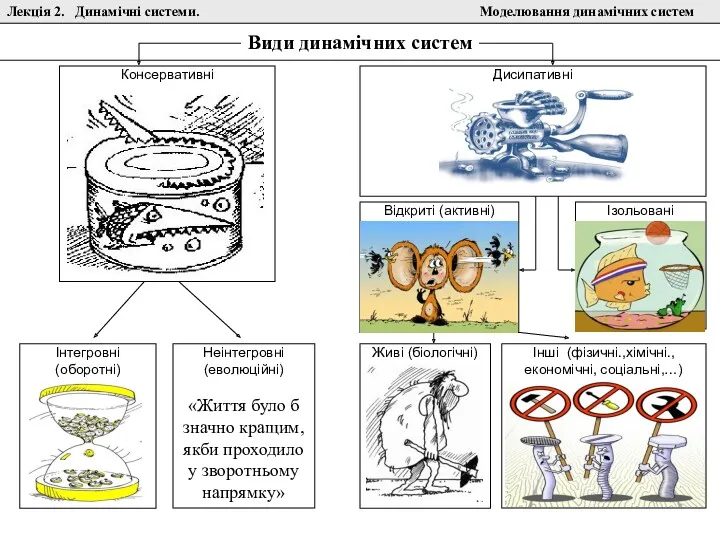
Види динамічних систем
Дисипативні
Відкриті (активні)
Неінтегровні (еволюційні)
«Життя
Лекція 2. Динамічні системи.
Моделювання динамічних систем
Види динамічних систем
Дисипативні
Відкриті (активні)
Неінтегровні (еволюційні)
«Життя
Лекція 2. Динамічні системи.
Моделювання динамічних систем
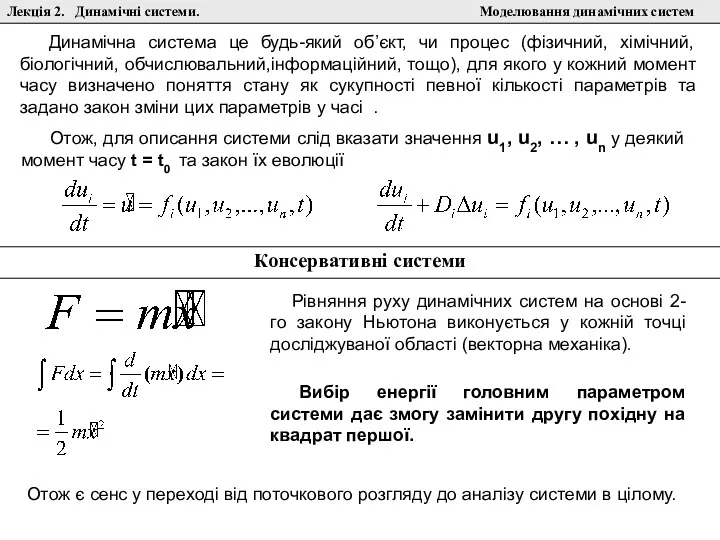
Динамічна система це будь-який об’єкт, чи
Лекція 2. Динамічні системи.
Моделювання динамічних систем
Динамічна система це будь-який об’єкт, чи
Лекція 2. Динамічні системи.
Моделювання динамічних систем
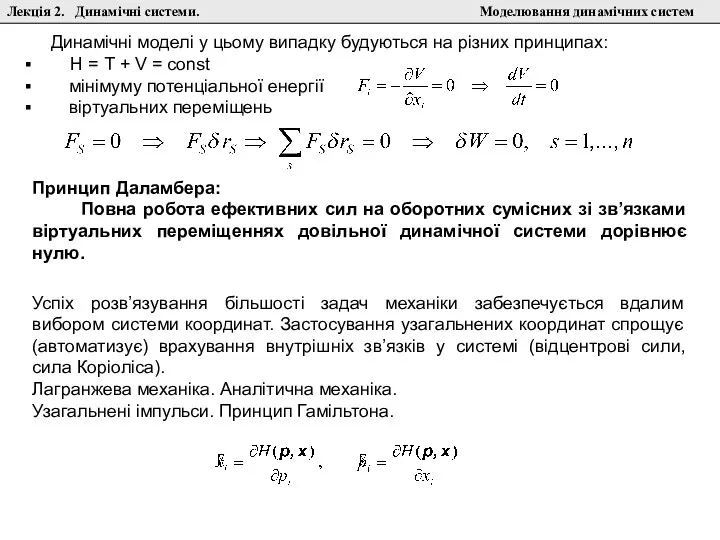
Успіх розв’язування більшості задач механіки забезпечується
Лекція 2. Динамічні системи.
Моделювання динамічних систем
Успіх розв’язування більшості задач механіки забезпечується
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
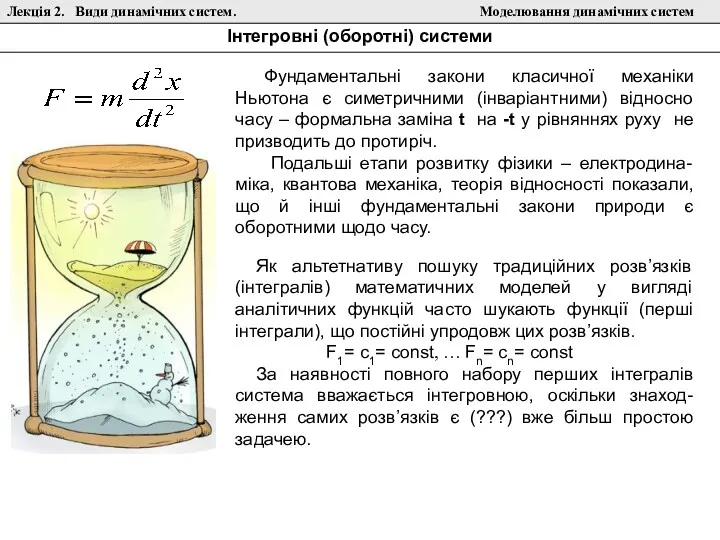
Інтегровні (оборотні) системи
Фундаментальні закони класичної
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Інтегровні (оборотні) системи
Фундаментальні закони класичної
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Неінтегровні (еволюційні) системи
Задача про
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Неінтегровні (еволюційні) системи
Задача про
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Дисипативні системи
Ізольовані системи.
Повна енергія системи
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Дисипативні системи
Ізольовані системи.
Повна енергія системи
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Нелінійні системи.
Чорний ящик.
Керуючі параметри. Параметри
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Нелінійні системи.
Чорний ящик.
Керуючі параметри. Параметри
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Коливні системи.
Автоколивні системи
Хаотичні коливання –
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Коливні системи.
Автоколивні системи
Хаотичні коливання –
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Нерівноважні системи.
Відкриті системи, через які
Лекція 2. Види динамічних систем.
Моделювання динамічних систем
Нерівноважні системи.
Відкриті системи, через які
Лекція 2. Динамічні системи.
Моделювання динамічних систем
Рівновага
Типи розв’язків
Періодичні розв’язки
Квазіперіодичність
Хаотичні рухи
Лекція 2. Динамічні системи.
Моделювання динамічних систем
Рівновага
Типи розв’язків
Періодичні розв’язки
Квазіперіодичність
Хаотичні рухи
 Занятие по экологии Амурский тигр - хозяин Дальневосточной тайги
Занятие по экологии Амурский тигр - хозяин Дальневосточной тайги Система питания двигателя от газобаллонной установки
Система питания двигателя от газобаллонной установки Необычные животные
Необычные животные Игра Умницы и умники
Игра Умницы и умники Мажор, минор
Мажор, минор Особенности копинг-стратегий подростков, входящих в группу суицидального риска
Особенности копинг-стратегий подростков, входящих в группу суицидального риска Презентация Технология развивающих игр
Презентация Технология развивающих игр Презентация Хозяйство мира
Презентация Хозяйство мира презентация История робототехники
презентация История робототехники Микроконтроллеры. Платформа Arduino UNO
Микроконтроллеры. Платформа Arduino UNO Нейропсихологические основы современных методов коррекции речевых расстройств (Полуэктова Е. Н. - учитель-логопед)
Нейропсихологические основы современных методов коррекции речевых расстройств (Полуэктова Е. Н. - учитель-логопед) Оборудование процессов ректификации
Оборудование процессов ректификации Познавательно – игровая программа: Благодарное слово.
Познавательно – игровая программа: Благодарное слово. Задачи по управленческому учету
Задачи по управленческому учету Портативна координатно-вимірювальна машина
Портативна координатно-вимірювальна машина Куликовская битва
Куликовская битва Проект про маму
Проект про маму Тест Твое здоровье
Тест Твое здоровье Проект:Эх, да Масленица
Проект:Эх, да Масленица Система сбора и подготовки нефти
Система сбора и подготовки нефти Рисуем Космос
Рисуем Космос Материалы для родителей
Материалы для родителей Протокол HTTP
Протокол HTTP XXI Всероссийская олимпиада школьников по информатике
XXI Всероссийская олимпиада школьников по информатике Выставка Зимняя сказка
Выставка Зимняя сказка Мифы о космонавтике
Мифы о космонавтике Вода- источник жизни на земле (презентация)
Вода- источник жизни на земле (презентация) Общественно-транспортные комплексы
Общественно-транспортные комплексы