Содержание
- 2. ВВЕДЕНИЕ Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только в образовательной версии набора
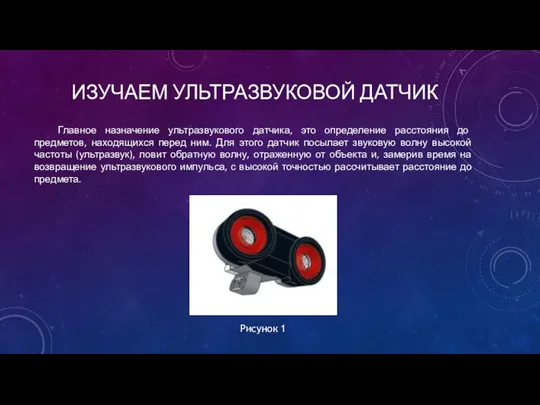
- 3. ИЗУЧАЕМ УЛЬТРАЗВУКОВОЙ ДАТЧИК Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для
- 4. ИЗУЧАЕМ УЛЬТРАЗВУКОВОЙ ДАТЧИК Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений
- 5. ЗАДАЧА Написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.
- 6. РЕШЕНИЕ Рисунок 2 Для решения задачи воспользуемся уже знакомым нам программным блоком "Ожидание" Оранжевой палитры, переключив
- 7. РЕШЕНИЕ Начать прямолинейное движение вперед (Рис. 3 поз. 1) Ждать, пока значение ультразвукового датчика не станет
- 9. Скачать презентацию
ВВЕДЕНИЕ
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только
ВВЕДЕНИЕ
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только
ИЗУЧАЕМ УЛЬТРАЗВУКОВОЙ ДАТЧИК
Главное назначение ультразвукового датчика, это определение расстояния до предметов,
ИЗУЧАЕМ УЛЬТРАЗВУКОВОЙ ДАТЧИК
Главное назначение ультразвукового датчика, это определение расстояния до предметов,
ИЗУЧАЕМ УЛЬТРАЗВУКОВОЙ ДАТЧИК
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или
ИЗУЧАЕМ УЛЬТРАЗВУКОВОЙ ДАТЧИК
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или
ЗАДАЧА
Написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до
ЗАДАЧА
Написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до
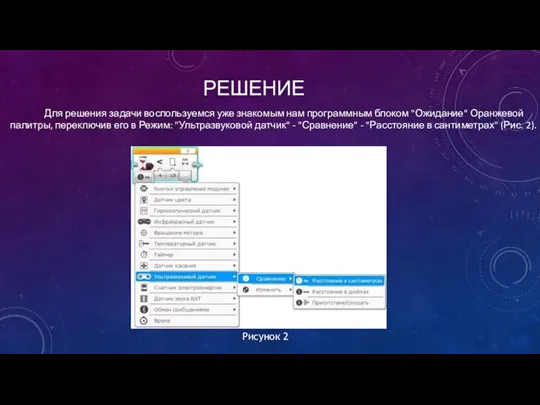
РЕШЕНИЕ
Рисунок 2
Для решения задачи воспользуемся уже знакомым нам программным блоком "Ожидание"
РЕШЕНИЕ
Рисунок 2
Для решения задачи воспользуемся уже знакомым нам программным блоком "Ожидание"
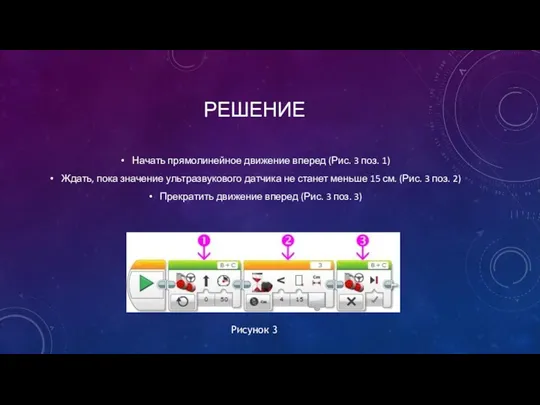
РЕШЕНИЕ
Начать прямолинейное движение вперед (Рис. 3 поз. 1)
Ждать, пока значение ультразвукового
РЕШЕНИЕ
Начать прямолинейное движение вперед (Рис. 3 поз. 1)
Ждать, пока значение ультразвукового
 Современная модель технологической подготовки школьников
Современная модель технологической подготовки школьников В здоровом теле здоровый дух. Соревнования
В здоровом теле здоровый дух. Соревнования Мікропроцесорна техніка
Мікропроцесорна техніка Медицинская статистика. Определение, задачи, разделы
Медицинская статистика. Определение, задачи, разделы Республика Крым
Республика Крым Блокированный дом на 2 семьи
Блокированный дом на 2 семьи Дробно рациональные уравнения
Дробно рациональные уравнения Методическая копилка
Методическая копилка Сільське господарство України. Рослинництво
Сільське господарство України. Рослинництво 20240124_izo_7_klass._tema_4._tsvet_-_element_kompozitsionnogo_tvorchestva
20240124_izo_7_klass._tema_4._tsvet_-_element_kompozitsionnogo_tvorchestva Строительная геотехнология
Строительная геотехнология Правовые основы преподавания религий и этики в школе
Правовые основы преподавания религий и этики в школе Евангельские события Рождества Христова
Евангельские события Рождества Христова Преподобный Серафим Саровский
Преподобный Серафим Саровский Психологическое консультирование
Психологическое консультирование Афанасий Фет. Особенности лирики поэта. Философская лирика
Афанасий Фет. Особенности лирики поэта. Философская лирика Комплексная оценка состояния здоровья ребенка
Комплексная оценка состояния здоровья ребенка Оценивание личностных достижений учащихся при обучении химии в 8 классе общеобразовательной школы
Оценивание личностных достижений учащихся при обучении химии в 8 классе общеобразовательной школы Патриоты России
Патриоты России Значение дидактической игры в экологическом воспитании детей.
Значение дидактической игры в экологическом воспитании детей. Закономерности наследования признаков
Закономерности наследования признаков Технология установки дополнительного света на легковых автомобилях в соответствии с техническим регламентом таможенного союза
Технология установки дополнительного света на легковых автомобилях в соответствии с техническим регламентом таможенного союза ОТКРЫТЫЙ УРОК ПО ХИМИИ 8 КЛАСС
ОТКРЫТЫЙ УРОК ПО ХИМИИ 8 КЛАСС Самопрезентация: Применение современных методов обучения как средства повышения эффективности в изучении истории и обществознания.
Самопрезентация: Применение современных методов обучения как средства повышения эффективности в изучении истории и обществознания. Знакомство с Arduino. Lesson 1
Знакомство с Arduino. Lesson 1 Студенческие научные кружки
Студенческие научные кружки Пасха Христова
Пасха Христова Правила технической эксплуатации железных дорог Российской Федерации
Правила технической эксплуатации железных дорог Российской Федерации