- Общие вопросы ЦИТ

Содержание
- 2. ГЛАВА 1. ОБЩИЕ ВОПРОСЫ ЦИТ Содержание: Примерная структура аналого-цифрового измерительного устройства Коды Что такое код Взгляды
- 3. ПРИМЕРНАЯ СТРУКТУРА АНАЛОГО-ЦИФРОВОГО ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА АД − аналоговые датчики; Ус − усилитель. Цифровые и частотные датчики
- 4. ЧТО ТАКОЕ КОД Код есть упорядоченная тройка, состоящая из множества объектов, реальных или идеальных (например, числовых),
- 5. ВЗГЛЯДЫ НА КОДЫ С РАЗНЫХ СТОРОН Рассматриваем коды для ЦИТ с разных сторон. В соответствии с
- 6. 1. ОБЛАСТИ ОТОБРАЖАЕМЫХ ОБЪЕКТОВ В ЦИТ 1.1. Важнейшая для ЦИТ область объектов − числовые значения величин.
- 7. 1.2. Часто бывает нужно отобразить, кроме чисел, имена единиц величин и другую буквенную информацию. Тогда используются
- 8. 1.3. Для отображения пространственных положений в цифровых датчиках бывает удобно использовать специальные коды, не имеющие общего
- 9. 1.4. При отображении управляющей информации часто используются коды, каждый бит которых рассматривается как самостоятельный управляющий сигнал.
- 10. Для управления семисегментными жидкокристаллическими или светодиодными индикаторами используется специальный “семисегментный” код. a b c d e
- 11. 1.5. Коды, получаемые непосредственно от источников информации, называются первичными. Эти коды являются областями отображаемых объектов для
- 12. 2. НЕКОТОРЫЕ ВИДЫ КОДОВЫХ ЗНАКОВ, ИСПОЛЬЗУЕМЫХ В ЦИТ 2.1. Внутри цифрового прибора или модуля 0 и
- 13. 3. ПО СПОСОБУ ПЕРЕДАЧИ РАЗЛИЧАЮТ КОДЫ: 3.1. Параллельные, если кодовые знаки, образующие комбинацию, передаются одновременно по
- 14. 3.2. Последовательные, если кодовые знаки, образующие комбинацию, передаются один за другим по одной линии. Пример: последовательный
- 15. 4. ЛОГИЧЕСКИЕ СТРУКТУРЫ КОДОВ (ОТОБРАЖАЮЩИЕ ФУНКЦИИ) В общем случае отображение произвольно. Например, структура “семисегментного” кода не
- 16. ВАЖНЕЙШИЕ ДЛЯ ЦИТ ЦИФРОВЫЕ КОДЫ Натуральный двоичный код Веса разрядов 1; 2; 4; 8; 16… при
- 17. КОДЫ ДЛЯ БИПОЛЯРНЫХ АЦП И ЦАП ……………… +2 000…010 +1 000…001 0 000…000 –1 111…111 –2
- 18. Дополнительный двоичный код может получаться в ЦИТ естественным путём: Кодированный диск Реверсивный счётчик 0 Положительные углы
- 19. ЕСЛИ РАЗРЯДНОСТЬ АЦП, РАБОТАЮЩЕГО В ДОПОЛНИТЕЛЬНОМ КОДЕ, МЕНЬШЕ РАЗРЯДНОСТИ СЛОВА В КОНТРОЛЛЕРЕ, НЕОБХОДИМО ВЫПОЛНИТЬ “РАСПРОСТРАНЕНИЕ ЗНАКА”
- 20. Смещённый двоичный код ……………… +2 100…010 +1 100…001 0 100…000 –1 011…111 –2 011…110 …………….. αn
- 21. Смещённый двоичный код используется для получение биполярной характеристики преобразования при однополярном АЦП или ЦАП × ×
- 22. КОД ГРЕЯ (РЕФЛЕКСНЫЙ ИЛИ ОТРАЖЁННЫЙ КОД) ПРИНАДЛЕЖИТ К КЛАССУ ОДНОПЕРЕМЕННЫХ КОДОВ, ПОЗВОЛЯЮЩИХ СЧИТЫВАТЬ КОДОВЫЕ КОМБИНАЦИИ В
- 23. ТАБЛИЦА КОДА ГРЕЯ, КАК И ДРУГИХ (НАТУРАЛЬНОГО, ДОПОЛНИТЕЛЬНОГО, СМЕЩЁННОГО) КОДОВ, ЗАМЫКАЕТСЯ В КОЛЬЦО 00000000 ………… 00000001
- 24. ПРЕОБРАЗОВАНИЕ КОДА ГРЕЯ В НАТУРАЛЬНЫЙ ДВОИЧНЫЙ КОД И В ДЕСЯТИЧНУЮ СИСТЕМУ СЧИСЛЕНИЯ Пример преобразования в натуральный
- 25. ФАЗОВОЕ ПРЕДСТАВЛЕНИЕ КОДОВ Натуральный двоичный код: fi(x) = sin(2πx/2i); Код Грея: fi(x) = cos(πx/2i). αi =
- 26. Подробнее о кодах для ЦИТ можно прочитать в учебном пособии: Кнорринг В.Г. Цифровые измерительные устройства. Теоретические
- 27. НЕОБХОДИМЫЕ СВЕДЕНИЯ ОБ ИНТЕРФЕЙСАХ (АППАРАТНЫХ) Где в ЦИТ используются интерфейсы Для связи цифровых датчиков с измерительным
- 28. Цифровой вибродатчик − одна из многих разработок компании ZETLAB (г. Зеленоград под Москвой) – интерфейс RS-485
- 29. Датчики давления фирмы Метран, г. Челябинск – интерфейс RS-485
- 30. Последовательный интерфейс 1-wire требует всего двух проводов для связи многих датчиков с измерительным устройством (по ним
- 31. Разработаны согласующие микросхемы, позволяющие работать с шиной 1-wire через стандартные интерфейсы микроконтроллеров:
- 32. Для связи цифрового прибора или измерительного блока с компьютером (выхода в систему) также могут использоваться интерфейсы
- 33. Рабочая станция HP-9845 была создана фирмой в 1977 г. Современные компьютеры не сопрягаются прямо с каналом
- 34. Среди интерфейсов модульных систем недолгое время монополистом был КАМАК. Сейчас он полностью устарел. Ему на смену
- 35. Наиболее часто в этом курсе будут упоминаться интерфейсы межмикросхемного уровня, связывающие микроконтроллер с АЦП и другими
- 36. Сигнал W/B выбирает передачу полного слова данных или двух последовательных байтов
- 37. ВРЕМЕННЫЕ ДИАГРАММЫ РАБОТЫ АЦП AD7933 ПРИ ПЕРЕДАЧЕ В МИКРОКОНТРОЛЛЕР ЦЕЛОГО СЛОВА
- 38. ВРЕМЕННЫЕ ДИАГРАММЫ ПОБАЙТНОЙ ПЕРЕДАЧИ РЕЗУЛЬТАТА ПРЕОБРАЗОВАНИЯ АЦП AD7933 Сигнал HBEN (High Byte ENable ) подаётся на
- 39. Последовательные интерфейсы, как правило, выполняются синхронными. Они могут быть симплексными (с передачей данных в одну сторону),
- 40. ПРЕДЛАГАЕМАЯ ФИРМОЙ ANALOG DEVICES СХЕМА СОПРЯЖЕНИЯ МИКРОСХЕМЫ АЦП AD7887 С МИКРОКОНТРОЛЛЕРОМ 8051 В данном случае микросхема
- 41. В UART МИКРОКОНТРОЛЛЕРА 8051, РАБОТАЮЩЕМ В СИНХРОННОМ РЕЖИМЕ, ПОЛЯРНОСТЬ ТАКТОВЫХ ИМПУЛЬСОВ (SERIAL CLOCK) ФИКСИРОВАНА. Поэтому при
- 42. ЕЩЁ ХУЖЕ ТО, ЧТО UART МИКРОКОНТРОЛЛЕРА 8051 СЧИТАЕТ ПЕРВЫЙ ПРИНЯТЫЙ БИТ МЛАДШИМ, А ПОСЛЕДНИЙ СТАРШИМ. ПОДАВЛЯЮЩЕЕ
- 43. В СОВРЕМЕННОМ МИКРОКОНТРОЛЛЕРЕ С АРХИТЕКТУРОЙ 8051 МОГУТ БЫТЬ, НАРЯДУ С UART, СТАНДАРТНЫЕ СИНХРОННЫЕ ИНТЕРФЕЙСЫ (В ДАННОМ
- 44. В МИКРОКОНТРОЛЛЕРАХ ФИРМЫ ATMEL МОЖНО ВСТРЕТИТЬ СИНХРОННЫЙ “ДВУХПРОВОДНЫЙ” ИНТЕРФЕЙС TWI, “СОВМЕСТИМЫЙ С I2C И SMBUS”
- 45. ТАК ВЫГЛЯДИТ “ДВУХПРОВОДНАЯ” МАГИСТРАЛЬ SMBUS В ОПИСАНИИ МИКРОКОНТРОЛЛЕРА ФИРМЫ SILICON LABORATORIES
- 46. Магистральные интерфейсы требуют задания адресов ведомых устройств. В микросхемах 1-wire уникальный адрес записывается в микросхему изготовителем,
- 47. ПРИМЕР МИКРОСХЕМ АЦП С ФИКСИРОВАННЫМ АДРЕСОМ НА ШИНЕ I2C
- 48. ОТСУТСТВИЕ АДРЕСНЫХ ВЫВОДОВ В ДАННОМ СЛУЧАЕ КОМПЕНСИРУЕТСЯ ВЫПУСКОМ ОДНОТИПНЫХ МИКРОСХЕМ С РАЗЛИЧНЫМИ ФИКСИРОВАННЫМИ АДРЕСАМИ НА ШИНЕ
- 49. СОЕДИНЕНИЕ АЦП С МИКРОКОНТРОЛЛЕРОМ ПО СТАНДАРТУ I2C
- 50. ЗАПИСЬ ДАННЫХ В РЕГИСТР КОНФИГУРАЦИИ МИКРОСХЕМ AD7991/AD7995/AD7999. ЧЕТЫРЕ БИТА ЗАПИСЫВАЕМОГО БАЙТА ОПРЕДЕЛЯЮТ ВЫБОР ОДНОГО, ДВУХ, ТРЁХ
- 51. ЗАПУСК АЦП И ЧТЕНИЕ ДВУХ БАЙТОВ ДАННЫХ
- 52. ИСПОЛЬЗОВАНИЕ БИТА ACKNOWLEDGE ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АЦП
- 53. ПРИНЦИП РАБОТЫ SPI ПРИ СОЕДИНЕНИИ ДВУХ МИКРОКОНТРОЛЛЕРОВ ВЫВОДЫ ВЕДОМЫХ АНАЛОГО-ЦИФРОВЫХ МИКРОСХЕМ ОБОЗНАЧАЮТСЯ ИНАЧЕ. В ЧАСТНОСТИ, ДЛЯ
- 54. Достоинством интерфейса SPI является его гибкость. SPI нужно настраивать соответственно временной диаграмме обмена данными, которая требуется
- 55. Четыре варианта временной диаграммы обмена данными, обеспечиваемые интерфейсным блоком SPI микроконтроллера Атмел
- 56. ПРИМЕР ВРЕМЕННÓЙ ДИАГРАММЫ ВЕДОМОЙ МИКРОСХЕМЫ: 8-РАЗРЯДНЫЙ АЦП AD7923. ИСХОДНО НА ЛИНИИ SCLK НИЗКОЕ НАПРЯЖЕНИЕ. КАЖДЫЙ БИТ
- 57. В СООТВЕТСТВИИ С ВРЕМЕННÓЙ ДИАГРАММОЙ ПРЕДЫДУЩЕГО СЛАЙДА ВЫПОЛНЯЕТСЯ НАСТРОЙКА SPI В МИКРОКОНТРОЛЛЕРЕ: CPOL = 0; CPHA
- 58. ОСОБЫЙ СЛУЧАЙ: ВРЕМЕННАЯ ДИАГРАММА 14-РАЗРЯДНОГО АЦП AD7940 И ДРУГИХ АЦП СХОДНОЙ СТРУКТУРЫ ВАЖНО: ПЕРВЫЙ БИТ ПОМЕЩАЕТСЯ
- 59. ПОРТ SPI МОЖЕТ ОБСЛУЖИВАТЬ НЕСКОЛЬКО ВЕДОМЫХ УСТРОЙСТВ РИСУНОК − ИЗ ОПИСАНИЯ МИКРОКОНТРОЛЛЕРА ATMEL
- 60. Топология “звезда”, показанная на предыдущем слайде, не является единственно возможной при использовании SPI для обслуживания нескольких
- 61. ПРИМЕР МИКРОСХЕМ АЦП, ТРЕБУЮЩИХ ОДНОВРЕМЕННОГО ЧТЕНИЯ И ЗАПИСИ ДАННЫХ
- 62. SPI ПОЗВОЛЯЕТ ОДНОВРЕМЕННО ЧИТАТЬ И ЗАПИСЫВАТЬ ДАННЫЕ, НО ПРИ 16-БИТНОМ ФОРМАТЕ ДАННЫХ ТРЕБУЕТ ДВУХ ПЕРЕСЫЛОК Сигнальные
- 64. Скачать презентацию

ГЛАВА 1. ОБЩИЕ ВОПРОСЫ ЦИТ
Содержание:
Примерная структура аналого-цифрового измерительного устройства
Коды
Что такое
ГЛАВА 1. ОБЩИЕ ВОПРОСЫ ЦИТ
Содержание:
Примерная структура аналого-цифрового измерительного устройства
Коды
Что такое

ПРИМЕРНАЯ СТРУКТУРА АНАЛОГО-ЦИФРОВОГО ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА
АД − аналоговые датчики;
Ус − усилитель.
Цифровые и
ПРИМЕРНАЯ СТРУКТУРА АНАЛОГО-ЦИФРОВОГО ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА
АД − аналоговые датчики;
Ус − усилитель.
Цифровые и

ЧТО ТАКОЕ КОД
Код есть упорядоченная тройка, состоящая из множества объектов, реальных
ЧТО ТАКОЕ КОД
Код есть упорядоченная тройка, состоящая из множества объектов, реальных

ВЗГЛЯДЫ НА КОДЫ С РАЗНЫХ СТОРОН
Рассматриваем коды для ЦИТ с разных
ВЗГЛЯДЫ НА КОДЫ С РАЗНЫХ СТОРОН
Рассматриваем коды для ЦИТ с разных

1. ОБЛАСТИ ОТОБРАЖАЕМЫХ ОБЪЕКТОВ В ЦИТ
1.1. Важнейшая для ЦИТ область объектов
1. ОБЛАСТИ ОТОБРАЖАЕМЫХ ОБЪЕКТОВ В ЦИТ
1.1. Важнейшая для ЦИТ область объектов

1.2. Часто бывает нужно отобразить, кроме чисел, имена единиц величин и
1.2. Часто бывает нужно отобразить, кроме чисел, имена единиц величин и

1.3. Для отображения пространственных положений в цифровых датчиках бывает удобно использовать
1.3. Для отображения пространственных положений в цифровых датчиках бывает удобно использовать

1.4. При отображении управляющей информации часто используются коды, каждый бит которых
1.4. При отображении управляющей информации часто используются коды, каждый бит которых

Для управления семисегментными жидкокристаллическими или светодиодными индикаторами используется специальный “семисегментный” код.
Для управления семисегментными жидкокристаллическими или светодиодными индикаторами используется специальный “семисегментный” код.

1.5. Коды, получаемые непосредственно от источников информации, называются первичными.
Эти коды являются
1.5. Коды, получаемые непосредственно от источников информации, называются первичными.
Эти коды являются

2. НЕКОТОРЫЕ ВИДЫ КОДОВЫХ ЗНАКОВ, ИСПОЛЬЗУЕМЫХ В ЦИТ
2.1. Внутри цифрового прибора
2. НЕКОТОРЫЕ ВИДЫ КОДОВЫХ ЗНАКОВ, ИСПОЛЬЗУЕМЫХ В ЦИТ
2.1. Внутри цифрового прибора

3. ПО СПОСОБУ ПЕРЕДАЧИ РАЗЛИЧАЮТ КОДЫ:
3.1. Параллельные, если кодовые знаки, образующие
3. ПО СПОСОБУ ПЕРЕДАЧИ РАЗЛИЧАЮТ КОДЫ:
3.1. Параллельные, если кодовые знаки, образующие

3.2. Последовательные, если кодовые знаки, образующие комбинацию, передаются один за другим
3.2. Последовательные, если кодовые знаки, образующие комбинацию, передаются один за другим

4. ЛОГИЧЕСКИЕ СТРУКТУРЫ КОДОВ (ОТОБРАЖАЮЩИЕ ФУНКЦИИ)
В общем случае отображение произвольно. Например,
4. ЛОГИЧЕСКИЕ СТРУКТУРЫ КОДОВ (ОТОБРАЖАЮЩИЕ ФУНКЦИИ)
В общем случае отображение произвольно. Например,

ВАЖНЕЙШИЕ ДЛЯ ЦИТ ЦИФРОВЫЕ КОДЫ
Натуральный двоичный код
Веса разрядов 1; 2;
ВАЖНЕЙШИЕ ДЛЯ ЦИТ ЦИФРОВЫЕ КОДЫ
Натуральный двоичный код
Веса разрядов 1; 2;

КОДЫ ДЛЯ БИПОЛЯРНЫХ АЦП И ЦАП
………………
+2 000…010
+1 000…001
0 000…000
–1 111…111
–2
КОДЫ ДЛЯ БИПОЛЯРНЫХ АЦП И ЦАП
………………
+2 000…010
+1 000…001
0 000…000
–1 111…111
–2

Дополнительный двоичный код может получаться в ЦИТ естественным путём:
Кодированный
Дополнительный двоичный код может получаться в ЦИТ естественным путём:
Кодированный

ЕСЛИ РАЗРЯДНОСТЬ АЦП, РАБОТАЮЩЕГО В ДОПОЛНИТЕЛЬНОМ КОДЕ, МЕНЬШЕ РАЗРЯДНОСТИ СЛОВА В
ЕСЛИ РАЗРЯДНОСТЬ АЦП, РАБОТАЮЩЕГО В ДОПОЛНИТЕЛЬНОМ КОДЕ, МЕНЬШЕ РАЗРЯДНОСТИ СЛОВА В

Смещённый двоичный код
………………
+2 100…010
+1 100…001
0 100…000
–1 011…111
–2 011…110
……………..
αn − знаковый
Смещённый двоичный код
………………
+2 100…010
+1 100…001
0 100…000
–1 011…111
–2 011…110
……………..
αn − знаковый

Смещённый двоичный код используется для получение биполярной характеристики преобразования при однополярном
Смещённый двоичный код используется для получение биполярной характеристики преобразования при однополярном

КОД ГРЕЯ (РЕФЛЕКСНЫЙ ИЛИ ОТРАЖЁННЫЙ КОД) ПРИНАДЛЕЖИТ К КЛАССУ ОДНОПЕРЕМЕННЫХ КОДОВ,
КОД ГРЕЯ (РЕФЛЕКСНЫЙ ИЛИ ОТРАЖЁННЫЙ КОД) ПРИНАДЛЕЖИТ К КЛАССУ ОДНОПЕРЕМЕННЫХ КОДОВ,

ТАБЛИЦА КОДА ГРЕЯ, КАК И ДРУГИХ (НАТУРАЛЬНОГО,
ДОПОЛНИТЕЛЬНОГО, СМЕЩЁННОГО) КОДОВ, ЗАМЫКАЕТСЯ
ТАБЛИЦА КОДА ГРЕЯ, КАК И ДРУГИХ (НАТУРАЛЬНОГО, ДОПОЛНИТЕЛЬНОГО, СМЕЩЁННОГО) КОДОВ, ЗАМЫКАЕТСЯ

ПРЕОБРАЗОВАНИЕ КОДА ГРЕЯ В НАТУРАЛЬНЫЙ ДВОИЧНЫЙ КОД И В ДЕСЯТИЧНУЮ СИСТЕМУ
ПРЕОБРАЗОВАНИЕ КОДА ГРЕЯ В НАТУРАЛЬНЫЙ ДВОИЧНЫЙ КОД И В ДЕСЯТИЧНУЮ СИСТЕМУ

ФАЗОВОЕ ПРЕДСТАВЛЕНИЕ КОДОВ
Натуральный двоичный код:
fi(x) = sin(2πx/2i);
Код Грея:
fi(x) =
ФАЗОВОЕ ПРЕДСТАВЛЕНИЕ КОДОВ
Натуральный двоичный код:
fi(x) = sin(2πx/2i);
Код Грея:
fi(x) =

Подробнее о кодах для ЦИТ можно прочитать
в учебном пособии:
Кнорринг
Подробнее о кодах для ЦИТ можно прочитать
в учебном пособии:
Кнорринг

НЕОБХОДИМЫЕ СВЕДЕНИЯ ОБ ИНТЕРФЕЙСАХ (АППАРАТНЫХ)
Где в ЦИТ используются интерфейсы
Для связи цифровых
НЕОБХОДИМЫЕ СВЕДЕНИЯ ОБ ИНТЕРФЕЙСАХ (АППАРАТНЫХ)
Где в ЦИТ используются интерфейсы
Для связи цифровых

Цифровой вибродатчик − одна из многих разработок
компании ZETLAB (г. Зеленоград
Цифровой вибродатчик − одна из многих разработок
компании ZETLAB (г. Зеленоград

Датчики давления фирмы Метран, г. Челябинск – интерфейс RS-485
Датчики давления фирмы Метран, г. Челябинск – интерфейс RS-485

Последовательный интерфейс 1-wire требует всего двух проводов для связи многих датчиков
Последовательный интерфейс 1-wire требует всего двух проводов для связи многих датчиков

Разработаны согласующие микросхемы, позволяющие работать с шиной 1-wire через стандартные интерфейсы
Разработаны согласующие микросхемы, позволяющие работать с шиной 1-wire через стандартные интерфейсы

Для связи цифрового прибора или измерительного блока с компьютером (выхода в
Для связи цифрового прибора или измерительного блока с компьютером (выхода в

Рабочая станция HP-9845 была создана фирмой в 1977 г.
Современные компьютеры
Рабочая станция HP-9845 была создана фирмой в 1977 г.
Современные компьютеры

Среди интерфейсов модульных систем недолгое время монополистом был КАМАК. Сейчас он
Среди интерфейсов модульных систем недолгое время монополистом был КАМАК. Сейчас он

Наиболее часто в этом курсе будут упоминаться интерфейсы межмикросхемного уровня, связывающие
Наиболее часто в этом курсе будут упоминаться интерфейсы межмикросхемного уровня, связывающие

Сигнал W/B выбирает передачу полного слова данных или двух последовательных байтов
Сигнал W/B выбирает передачу полного слова данных или двух последовательных байтов

ВРЕМЕННЫЕ ДИАГРАММЫ РАБОТЫ АЦП AD7933
ПРИ ПЕРЕДАЧЕ В МИКРОКОНТРОЛЛЕР ЦЕЛОГО СЛОВА
ВРЕМЕННЫЕ ДИАГРАММЫ РАБОТЫ АЦП AD7933 ПРИ ПЕРЕДАЧЕ В МИКРОКОНТРОЛЛЕР ЦЕЛОГО СЛОВА

ВРЕМЕННЫЕ ДИАГРАММЫ ПОБАЙТНОЙ ПЕРЕДАЧИ РЕЗУЛЬТАТА ПРЕОБРАЗОВАНИЯ АЦП AD7933
Сигнал HBEN (High
ВРЕМЕННЫЕ ДИАГРАММЫ ПОБАЙТНОЙ ПЕРЕДАЧИ РЕЗУЛЬТАТА ПРЕОБРАЗОВАНИЯ АЦП AD7933
Сигнал HBEN (High

Последовательные интерфейсы, как правило, выполняются синхронными. Они могут быть симплексными (с
Последовательные интерфейсы, как правило, выполняются синхронными. Они могут быть симплексными (с

ПРЕДЛАГАЕМАЯ ФИРМОЙ ANALOG DEVICES СХЕМА СОПРЯЖЕНИЯ МИКРОСХЕМЫ АЦП AD7887 С МИКРОКОНТРОЛЛЕРОМ
ПРЕДЛАГАЕМАЯ ФИРМОЙ ANALOG DEVICES СХЕМА СОПРЯЖЕНИЯ МИКРОСХЕМЫ АЦП AD7887 С МИКРОКОНТРОЛЛЕРОМ

В UART МИКРОКОНТРОЛЛЕРА 8051, РАБОТАЮЩЕМ В СИНХРОННОМ РЕЖИМЕ, ПОЛЯРНОСТЬ ТАКТОВЫХ ИМПУЛЬСОВ
В UART МИКРОКОНТРОЛЛЕРА 8051, РАБОТАЮЩЕМ В СИНХРОННОМ РЕЖИМЕ, ПОЛЯРНОСТЬ ТАКТОВЫХ ИМПУЛЬСОВ

ЕЩЁ ХУЖЕ ТО, ЧТО UART МИКРОКОНТРОЛЛЕРА 8051 СЧИТАЕТ ПЕРВЫЙ ПРИНЯТЫЙ БИТ
ЕЩЁ ХУЖЕ ТО, ЧТО UART МИКРОКОНТРОЛЛЕРА 8051 СЧИТАЕТ ПЕРВЫЙ ПРИНЯТЫЙ БИТ

В СОВРЕМЕННОМ МИКРОКОНТРОЛЛЕРЕ С АРХИТЕКТУРОЙ 8051 МОГУТ БЫТЬ, НАРЯДУ С UART,
В СОВРЕМЕННОМ МИКРОКОНТРОЛЛЕРЕ С АРХИТЕКТУРОЙ 8051 МОГУТ БЫТЬ, НАРЯДУ С UART,

В МИКРОКОНТРОЛЛЕРАХ ФИРМЫ ATMEL МОЖНО ВСТРЕТИТЬ СИНХРОННЫЙ “ДВУХПРОВОДНЫЙ” ИНТЕРФЕЙС TWI, “СОВМЕСТИМЫЙ
В МИКРОКОНТРОЛЛЕРАХ ФИРМЫ ATMEL МОЖНО ВСТРЕТИТЬ СИНХРОННЫЙ “ДВУХПРОВОДНЫЙ” ИНТЕРФЕЙС TWI, “СОВМЕСТИМЫЙ

ТАК ВЫГЛЯДИТ “ДВУХПРОВОДНАЯ” МАГИСТРАЛЬ SMBUS В ОПИСАНИИ МИКРОКОНТРОЛЛЕРА ФИРМЫ SILICON LABORATORIES
ТАК ВЫГЛЯДИТ “ДВУХПРОВОДНАЯ” МАГИСТРАЛЬ SMBUS В ОПИСАНИИ МИКРОКОНТРОЛЛЕРА ФИРМЫ SILICON LABORATORIES

Магистральные интерфейсы требуют задания адресов ведомых устройств.
В микросхемах 1-wire уникальный
Магистральные интерфейсы требуют задания адресов ведомых устройств.
В микросхемах 1-wire уникальный

ПРИМЕР МИКРОСХЕМ АЦП С ФИКСИРОВАННЫМ АДРЕСОМ НА ШИНЕ I2C
ПРИМЕР МИКРОСХЕМ АЦП С ФИКСИРОВАННЫМ АДРЕСОМ НА ШИНЕ I2C

ОТСУТСТВИЕ АДРЕСНЫХ ВЫВОДОВ В ДАННОМ СЛУЧАЕ КОМПЕНСИРУЕТСЯ ВЫПУСКОМ ОДНОТИПНЫХ МИКРОСХЕМ С
ОТСУТСТВИЕ АДРЕСНЫХ ВЫВОДОВ В ДАННОМ СЛУЧАЕ КОМПЕНСИРУЕТСЯ ВЫПУСКОМ ОДНОТИПНЫХ МИКРОСХЕМ С

СОЕДИНЕНИЕ АЦП С МИКРОКОНТРОЛЛЕРОМ
ПО СТАНДАРТУ I2C
СОЕДИНЕНИЕ АЦП С МИКРОКОНТРОЛЛЕРОМ
ПО СТАНДАРТУ I2C

ЗАПИСЬ ДАННЫХ В РЕГИСТР КОНФИГУРАЦИИ МИКРОСХЕМ AD7991/AD7995/AD7999. ЧЕТЫРЕ БИТА ЗАПИСЫВАЕМОГО БАЙТА
ЗАПИСЬ ДАННЫХ В РЕГИСТР КОНФИГУРАЦИИ МИКРОСХЕМ AD7991/AD7995/AD7999. ЧЕТЫРЕ БИТА ЗАПИСЫВАЕМОГО БАЙТА

ЗАПУСК АЦП И ЧТЕНИЕ ДВУХ БАЙТОВ ДАННЫХ
ЗАПУСК АЦП И ЧТЕНИЕ ДВУХ БАЙТОВ ДАННЫХ

ИСПОЛЬЗОВАНИЕ БИТА ACKNOWLEDGE
ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АЦП
ИСПОЛЬЗОВАНИЕ БИТА ACKNOWLEDGE
ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АЦП

ПРИНЦИП РАБОТЫ SPI ПРИ СОЕДИНЕНИИ ДВУХ МИКРОКОНТРОЛЛЕРОВ
ВЫВОДЫ ВЕДОМЫХ АНАЛОГО-ЦИФРОВЫХ МИКРОСХЕМ ОБОЗНАЧАЮТСЯ
ПРИНЦИП РАБОТЫ SPI ПРИ СОЕДИНЕНИИ ДВУХ МИКРОКОНТРОЛЛЕРОВ ВЫВОДЫ ВЕДОМЫХ АНАЛОГО-ЦИФРОВЫХ МИКРОСХЕМ ОБОЗНАЧАЮТСЯ

Достоинством интерфейса SPI является его гибкость.
SPI нужно настраивать соответственно временной
Достоинством интерфейса SPI является его гибкость.
SPI нужно настраивать соответственно временной

Четыре варианта
временной диаграммы
обмена данными,
обеспечиваемые
интерфейсным блоком
SPI микроконтроллера
Четыре варианта
временной диаграммы
обмена данными,
обеспечиваемые
интерфейсным блоком
SPI микроконтроллера

ПРИМЕР ВРЕМЕННÓЙ ДИАГРАММЫ ВЕДОМОЙ МИКРОСХЕМЫ:
8-РАЗРЯДНЫЙ АЦП AD7923. ИСХОДНО НА ЛИНИИ
ПРИМЕР ВРЕМЕННÓЙ ДИАГРАММЫ ВЕДОМОЙ МИКРОСХЕМЫ: 8-РАЗРЯДНЫЙ АЦП AD7923. ИСХОДНО НА ЛИНИИ

В СООТВЕТСТВИИ С ВРЕМЕННÓЙ ДИАГРАММОЙ ПРЕДЫДУЩЕГО СЛАЙДА ВЫПОЛНЯЕТСЯ НАСТРОЙКА SPI В
В СООТВЕТСТВИИ С ВРЕМЕННÓЙ ДИАГРАММОЙ ПРЕДЫДУЩЕГО СЛАЙДА ВЫПОЛНЯЕТСЯ НАСТРОЙКА SPI В

ОСОБЫЙ СЛУЧАЙ: ВРЕМЕННАЯ ДИАГРАММА 14-РАЗРЯДНОГО АЦП AD7940 И ДРУГИХ АЦП СХОДНОЙ
ОСОБЫЙ СЛУЧАЙ: ВРЕМЕННАЯ ДИАГРАММА 14-РАЗРЯДНОГО АЦП AD7940 И ДРУГИХ АЦП СХОДНОЙ

ПОРТ SPI МОЖЕТ ОБСЛУЖИВАТЬ НЕСКОЛЬКО ВЕДОМЫХ УСТРОЙСТВ
РИСУНОК − ИЗ ОПИСАНИЯ МИКРОКОНТРОЛЛЕРА
ПОРТ SPI МОЖЕТ ОБСЛУЖИВАТЬ НЕСКОЛЬКО ВЕДОМЫХ УСТРОЙСТВ РИСУНОК − ИЗ ОПИСАНИЯ МИКРОКОНТРОЛЛЕРА

Топология “звезда”, показанная на предыдущем слайде, не является единственно возможной при
Топология “звезда”, показанная на предыдущем слайде, не является единственно возможной при

ПРИМЕР МИКРОСХЕМ АЦП,
ТРЕБУЮЩИХ ОДНОВРЕМЕННОГО
ЧТЕНИЯ И ЗАПИСИ ДАННЫХ
ПРИМЕР МИКРОСХЕМ АЦП,
ТРЕБУЮЩИХ ОДНОВРЕМЕННОГО
ЧТЕНИЯ И ЗАПИСИ ДАННЫХ

SPI ПОЗВОЛЯЕТ ОДНОВРЕМЕННО ЧИТАТЬ И ЗАПИСЫВАТЬ ДАННЫЕ, НО ПРИ 16-БИТНОМ ФОРМАТЕ
SPI ПОЗВОЛЯЕТ ОДНОВРЕМЕННО ЧИТАТЬ И ЗАПИСЫВАТЬ ДАННЫЕ, НО ПРИ 16-БИТНОМ ФОРМАТЕ
 Современная модель технологической подготовки школьников
Современная модель технологической подготовки школьников В здоровом теле здоровый дух. Соревнования
В здоровом теле здоровый дух. Соревнования Мікропроцесорна техніка
Мікропроцесорна техніка Медицинская статистика. Определение, задачи, разделы
Медицинская статистика. Определение, задачи, разделы Республика Крым
Республика Крым Блокированный дом на 2 семьи
Блокированный дом на 2 семьи Дробно рациональные уравнения
Дробно рациональные уравнения Методическая копилка
Методическая копилка Сільське господарство України. Рослинництво
Сільське господарство України. Рослинництво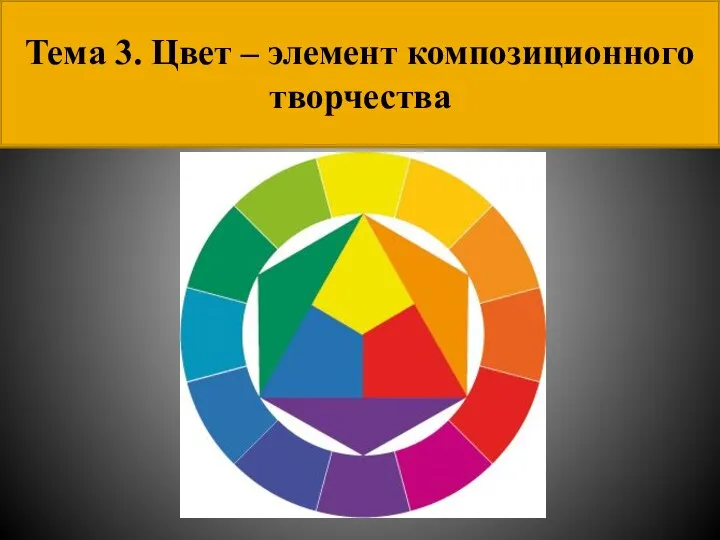 20240124_izo_7_klass._tema_4._tsvet_-_element_kompozitsionnogo_tvorchestva
20240124_izo_7_klass._tema_4._tsvet_-_element_kompozitsionnogo_tvorchestva Строительная геотехнология
Строительная геотехнология Правовые основы преподавания религий и этики в школе
Правовые основы преподавания религий и этики в школе Евангельские события Рождества Христова
Евангельские события Рождества Христова Преподобный Серафим Саровский
Преподобный Серафим Саровский Психологическое консультирование
Психологическое консультирование Афанасий Фет. Особенности лирики поэта. Философская лирика
Афанасий Фет. Особенности лирики поэта. Философская лирика Комплексная оценка состояния здоровья ребенка
Комплексная оценка состояния здоровья ребенка Оценивание личностных достижений учащихся при обучении химии в 8 классе общеобразовательной школы
Оценивание личностных достижений учащихся при обучении химии в 8 классе общеобразовательной школы Патриоты России
Патриоты России Значение дидактической игры в экологическом воспитании детей.
Значение дидактической игры в экологическом воспитании детей. Закономерности наследования признаков
Закономерности наследования признаков Технология установки дополнительного света на легковых автомобилях в соответствии с техническим регламентом таможенного союза
Технология установки дополнительного света на легковых автомобилях в соответствии с техническим регламентом таможенного союза ОТКРЫТЫЙ УРОК ПО ХИМИИ 8 КЛАСС
ОТКРЫТЫЙ УРОК ПО ХИМИИ 8 КЛАСС Самопрезентация: Применение современных методов обучения как средства повышения эффективности в изучении истории и обществознания.
Самопрезентация: Применение современных методов обучения как средства повышения эффективности в изучении истории и обществознания. Знакомство с Arduino. Lesson 1
Знакомство с Arduino. Lesson 1 Студенческие научные кружки
Студенческие научные кружки Пасха Христова
Пасха Христова Правила технической эксплуатации железных дорог Российской Федерации
Правила технической эксплуатации железных дорог Российской Федерации