- Оптимальный прием сигналов без памяти (лекция 3)

Содержание
- 2. При модуляции без памяти каждому информационному символу m ставится в соответствие сигнал конечной длительности sm(t). s0(t)
- 3. Манипулированный сигнал s(t) можно рассматривать как совокупность сигналов конечной длины sm(t), которые передают один информационный символ.
- 4. Манипулированный сигнал s(t) можно рассматривать как совокупность сигналов конечной длины sm(t), которые передают один информационный символ.
- 5. Прием манипулированного сигнала без памяти s(t) сводится к приему сигналов sm(t) по отдельности и их различии
- 6. Наиболее эффективный фильтр можно реализовать в том случае, когда известна форма передаваемого сигнала. А манипулированный сигнал
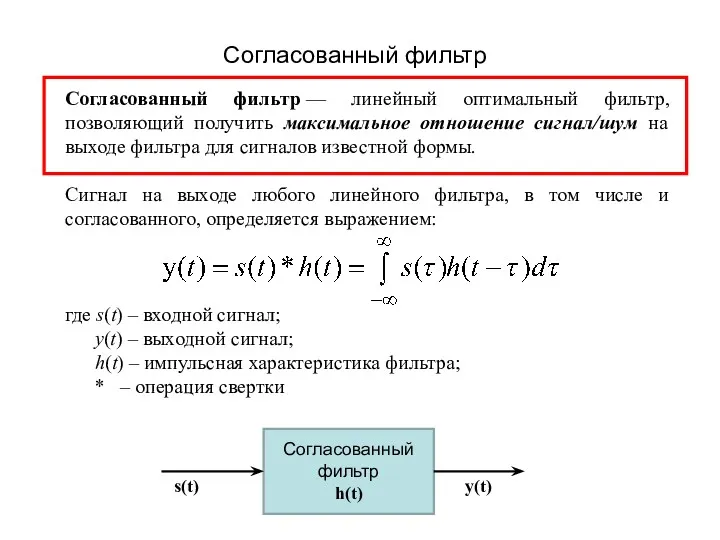
- 7. Согласованный фильтр Согласованный фильтр — линейный оптимальный фильтр, позволяющий получить максимальное отношение сигнал/шум на выходе фильтра
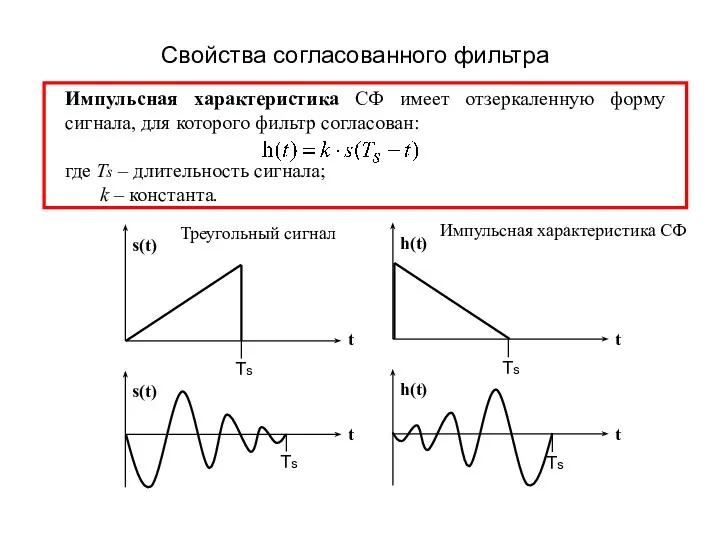
- 8. Свойства согласованного фильтра Импульсная характеристика СФ имеет отзеркаленную форму сигнала, для которого фильтр согласован: где Ts
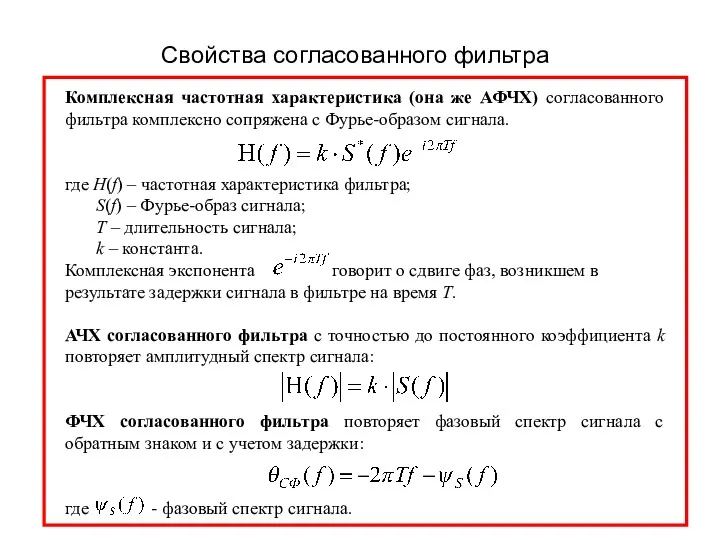
- 9. Свойства согласованного фильтра Комплексная частотная характеристика (она же АФЧХ) согласованного фильтра комплексно сопряжена с Фурье-образом сигнала.
- 10. Свойства согласованного фильтра
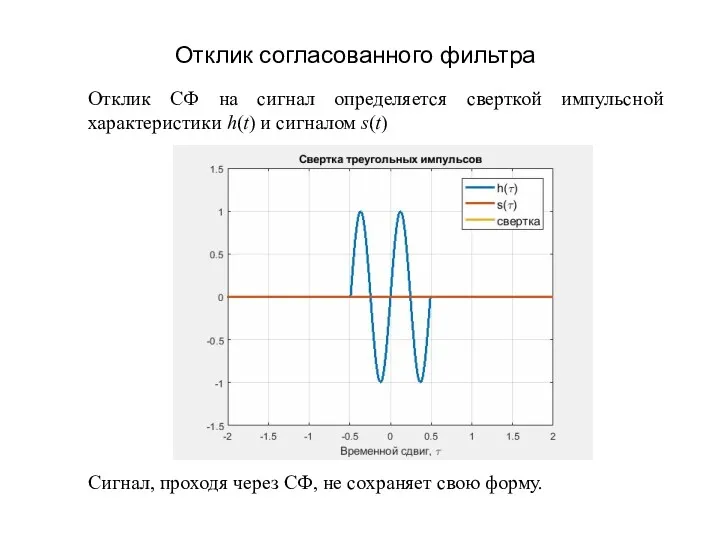
- 11. Отклик согласованного фильтра Отклик СФ на сигнал определяется сверткой импульсной характеристики h(t) и сигналом s(t) Сигнал,
- 12. Отклик согласованного фильтра Отклик СФ на сигнал определяется сверткой импульсной характеристики h(t) и сигналом s(t) Сигнал,
- 13. Оптимальный приемник r(t) =sm(t)+n(t) y(t) Устройство выборки __/ __ t=kTs y(kTs) Устройство принятия решения d(kTs) k=0,
- 14. Коррелятором называется устройство, выполняющее операцию корреляции: Коррелятор как и согласованный фильтр обеспечивает максимум отношения сигнал/шум для
- 15. Связь согласованного фильтра и коррелятора Сигнал на выходе СФ выражается как: А в моменты времени t
- 16. Оптимальный приемник на корреляторе r(t) =s(t)+n(t) g(t) Коррелятор Устройство выборки __/ __ sin(ωt) g(kT) Устройство принятия
- 17. Когерентный и некогерентный прием Когерентным приемом называется прием, при котором начальная фаза φо принимаемого сигнала известна.
- 18. Оптимальный когерентный приемник АМн сигналов Оптимальный приемник сигналов для случая, когда: s1(t) = ks2(t) На согласованном
- 19. Оптимальный когерентный приемник АМн сигналов Оптимальный приемник сигналов для случая, когда: s1(t) = ks2(t) На корреляторе
- 20. Оптимальный когерентный приемник 2-ФМн сигналов Оптимальный приемник сигналов для случая, когда: s1(t) = -s2(t) На согласованном
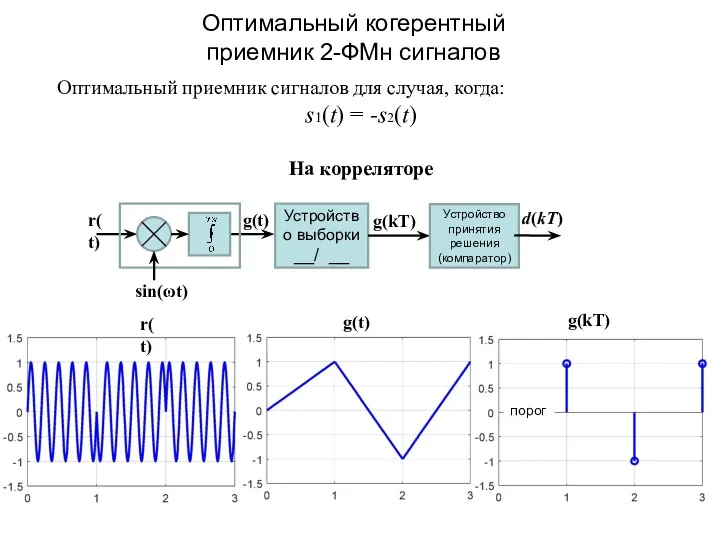
- 21. Оптимальный когерентный приемник 2-ФМн сигналов Оптимальный приемник сигналов для случая, когда: s1(t) = -s2(t) На корреляторе
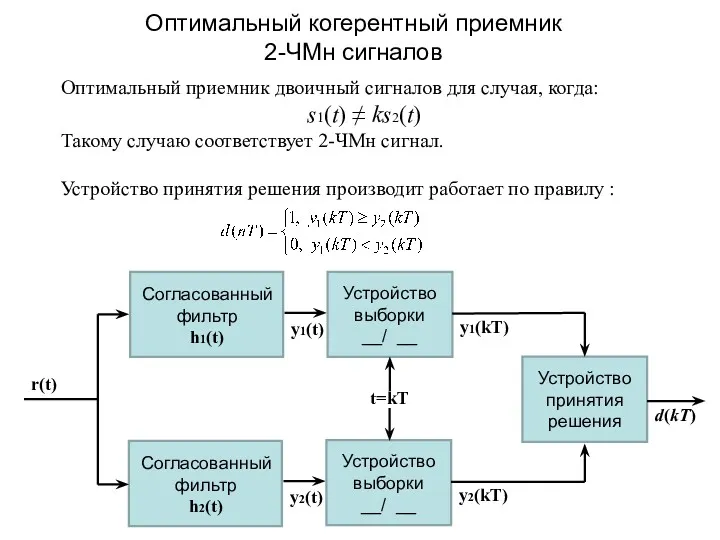
- 22. Оптимальный когерентный приемник 2-ЧМн сигналов r(t) y1(t) Устройство выборки __/ __ t=kT y1(kT) Устройство принятия решения
- 23. Оптимальный когерентный приемник 2-ЧМн r(t) g1(t) Устройство выборки __/ __ t=kT g1(kT) Устройство принятия решения d(kT)
- 24. Оптимальный приемник 4-ФМн r(t) y1(t) Устройство выборки __/ __ t=nT y1(nT) Устройство принятия решения d(nT) y2(t)
- 25. Оптимальный приемник М-ФМн и КАМ сигналов на корреляторах r(t) g1(t) Устройство выборки __/ __ t=kT g1(kT)
- 26. Евклидово расстояние определяется через выражение: em – евклидово расстояние до m-го символа dm; dI,m и dQ,m
- 27. Когерентный и некогерентный прием Что будет если начальная фаза φо будет не такая, какую мы ожидаем?
- 28. Ортогональность сигналов Сигналы s1(t) и s2(t) длительностью Тs называются ортогональными, если их коэффициент корреляции равен нулю:
- 29. Оптимальный некогерентный приемник АМн сигналов Оптимальный приемник двоичный сигналов для случая, когда: s1(t) = ks2(t) На
- 30. Некогерентный приемник 2-ЧМн g1(t) Устройство выборки __/ __ g1(kT) Устройство принятия решения d(kT) g2(t) g2(kT) sin(ω1t)
- 31. Вероятность ошибки двоичных равновероятных сигналов определяется выражением: где Rb – нормированный коэффициент взаимной корреляции: Eb –
- 32. Для биполярного антиподного сигнала, для которого выполняется условие s1(t)=-s2(t) коэффициент взаимной корреляции Rb=-1, следовательно вероятность ошибки
- 33. Коэффициент взаимной корреляции для 2-ЧМн при когерентном приеме Встает вопрос, какая минимальная разность частот обеспечит нулевой
- 34. Вероятность ошибки Rb=0 Rb=-1
- 36. Скачать презентацию
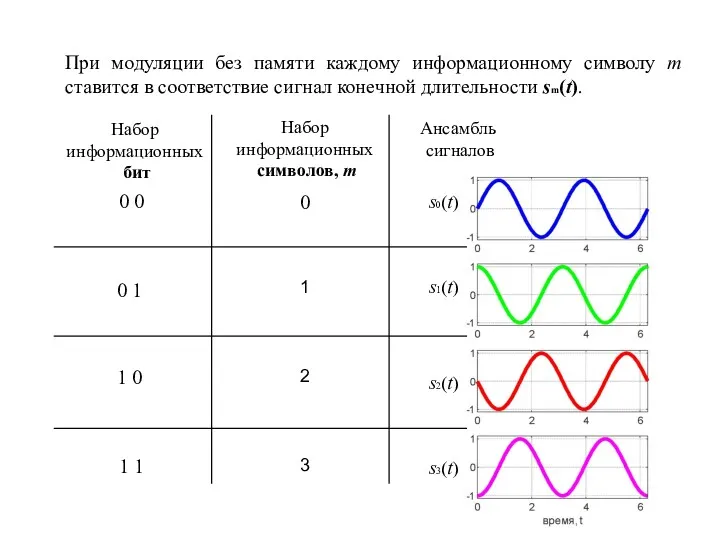
При модуляции без памяти каждому информационному символу m ставится в соответствие
При модуляции без памяти каждому информационному символу m ставится в соответствие
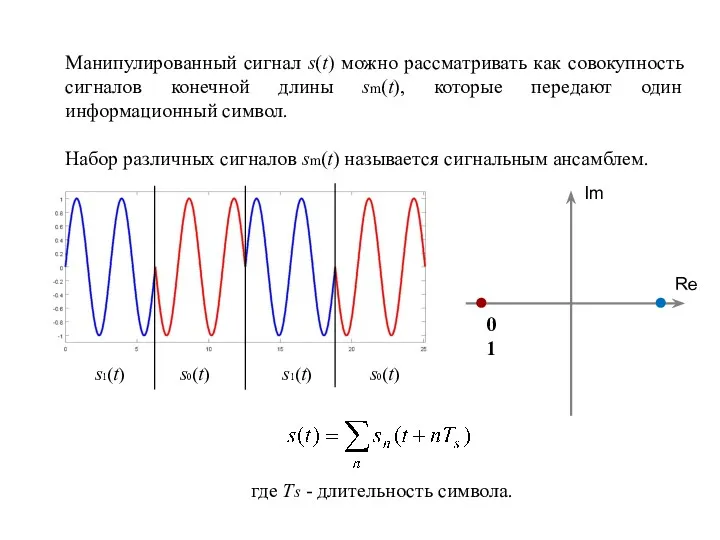
Манипулированный сигнал s(t) можно рассматривать как совокупность сигналов конечной длины sm(t),
Манипулированный сигнал s(t) можно рассматривать как совокупность сигналов конечной длины sm(t),
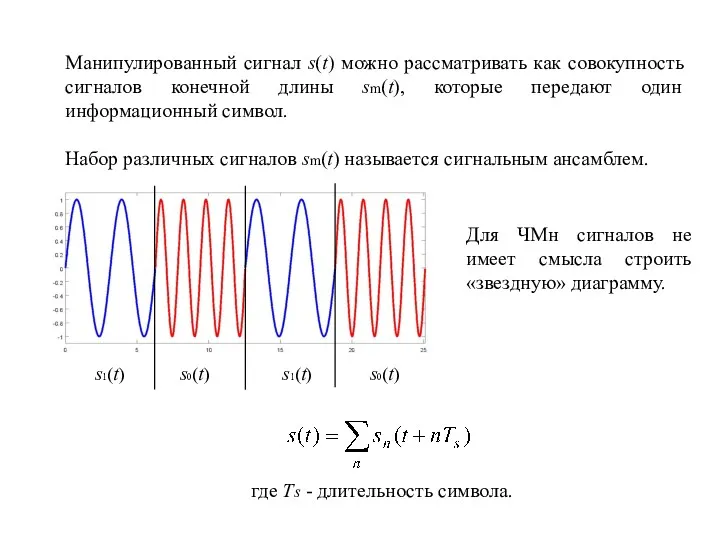
Манипулированный сигнал s(t) можно рассматривать как совокупность сигналов конечной длины sm(t),
Манипулированный сигнал s(t) можно рассматривать как совокупность сигналов конечной длины sm(t),
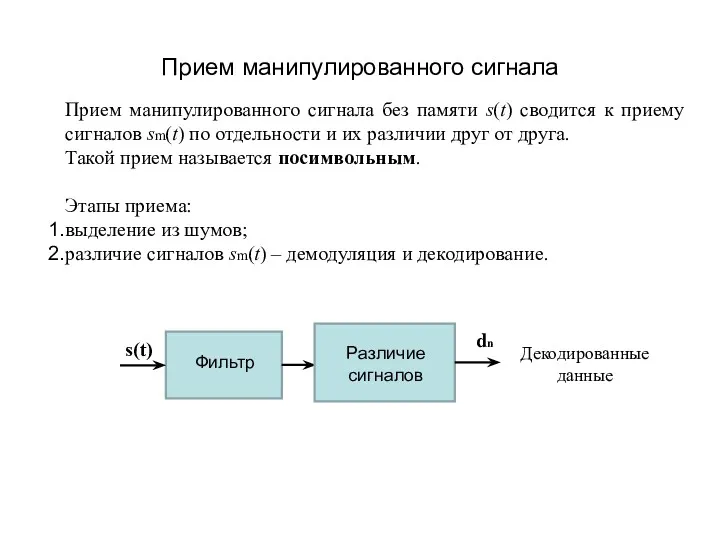
Прием манипулированного сигнала без памяти s(t) сводится к приему сигналов sm(t)
Прием манипулированного сигнала без памяти s(t) сводится к приему сигналов sm(t)
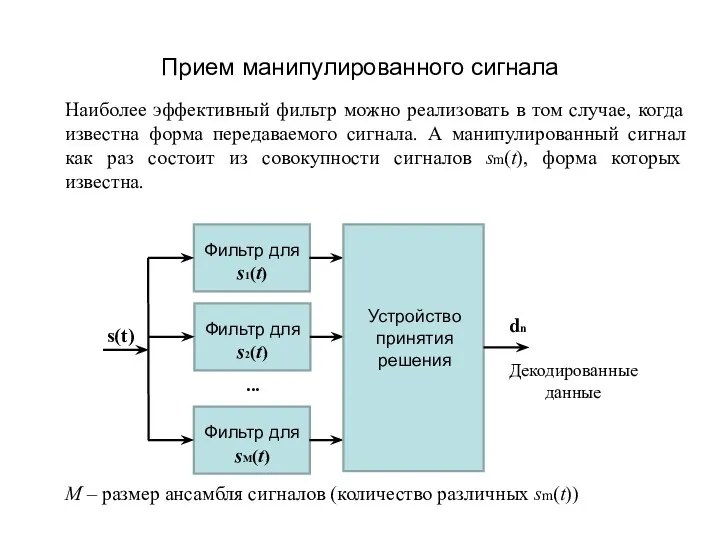
Наиболее эффективный фильтр можно реализовать в том случае, когда известна форма
Наиболее эффективный фильтр можно реализовать в том случае, когда известна форма
Согласованный фильтр
Согласованный фильтр — линейный оптимальный фильтр, позволяющий получить максимальное отношение сигнал/шум
Согласованный фильтр
Согласованный фильтр — линейный оптимальный фильтр, позволяющий получить максимальное отношение сигнал/шум
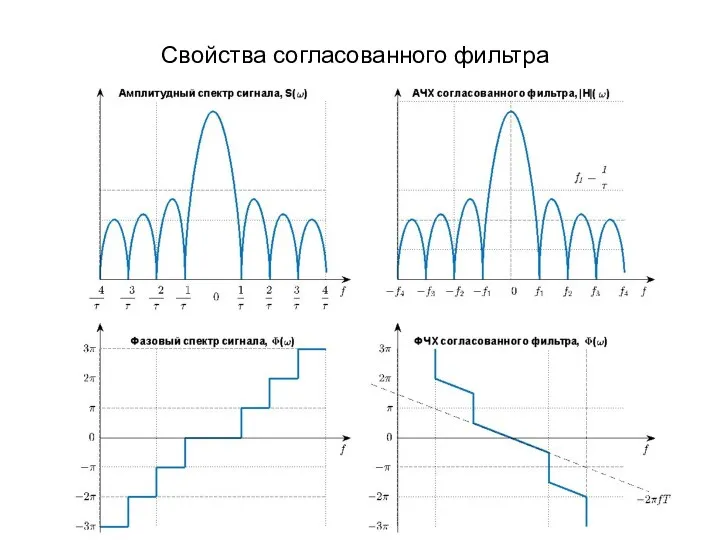
Свойства согласованного фильтра
Импульсная характеристика СФ имеет отзеркаленную форму сигнала, для которого
Свойства согласованного фильтра
Импульсная характеристика СФ имеет отзеркаленную форму сигнала, для которого
Свойства согласованного фильтра
Комплексная частотная характеристика (она же АФЧХ) согласованного фильтра комплексно
Свойства согласованного фильтра
Комплексная частотная характеристика (она же АФЧХ) согласованного фильтра комплексно
Свойства согласованного фильтра
Свойства согласованного фильтра
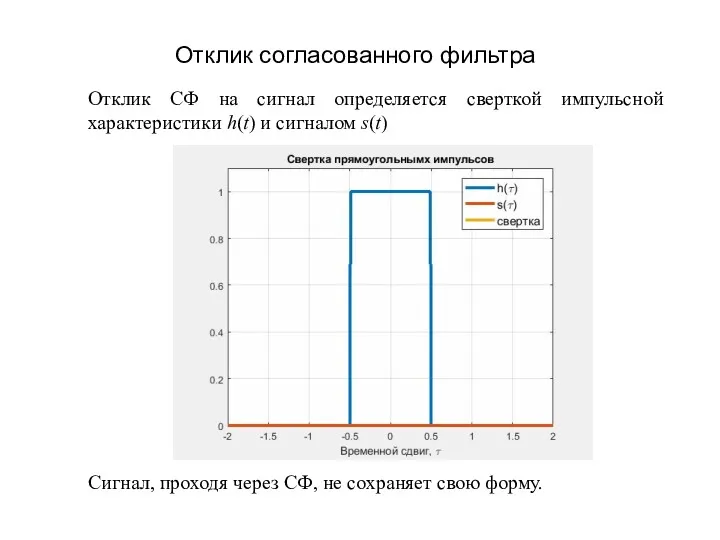
Отклик согласованного фильтра
Отклик СФ на сигнал определяется сверткой импульсной характеристики h(t)
Отклик согласованного фильтра
Отклик СФ на сигнал определяется сверткой импульсной характеристики h(t)
Отклик согласованного фильтра
Отклик СФ на сигнал определяется сверткой импульсной характеристики h(t)
Отклик согласованного фильтра
Отклик СФ на сигнал определяется сверткой импульсной характеристики h(t)
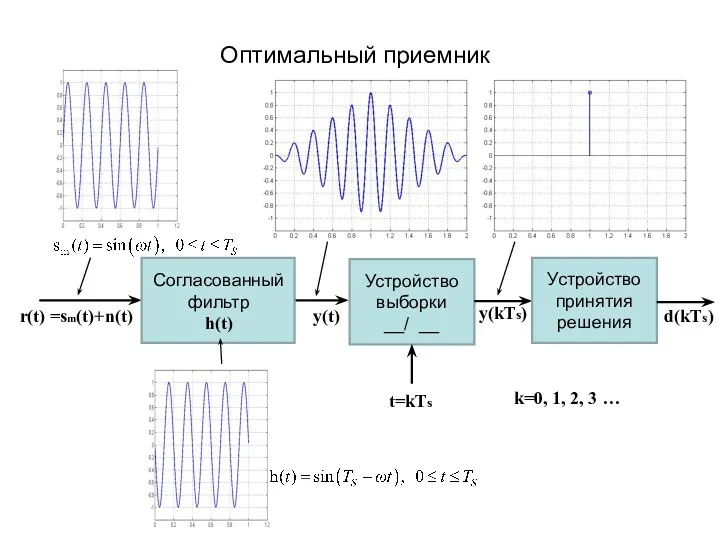
Оптимальный приемник
r(t) =sm(t)+n(t)
y(t)
Устройство выборки
__/ __
t=kTs
y(kTs)
Устройство принятия решения
d(kTs)
k=0, 1, 2, 3 …
Оптимальный приемник
r(t) =sm(t)+n(t)
y(t)
Устройство выборки
__/ __
t=kTs
y(kTs)
Устройство принятия решения
d(kTs)
k=0, 1, 2, 3 …
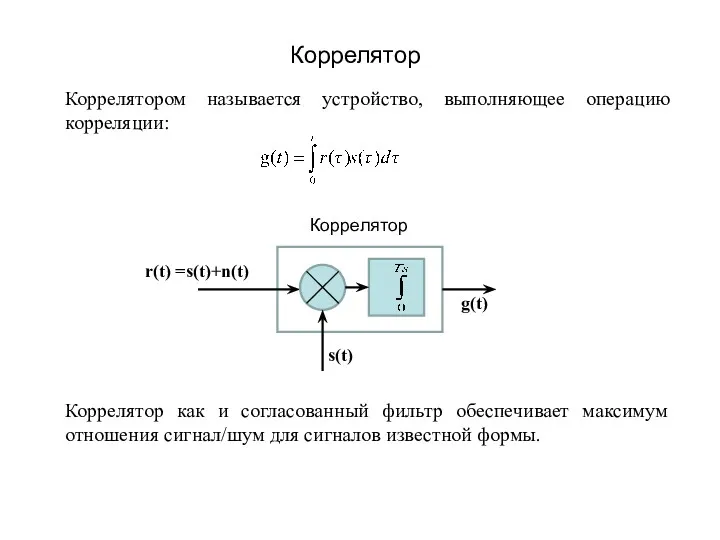
Коррелятором называется устройство, выполняющее операцию корреляции:
Коррелятор как и согласованный фильтр обеспечивает
Коррелятором называется устройство, выполняющее операцию корреляции:
Коррелятор как и согласованный фильтр обеспечивает
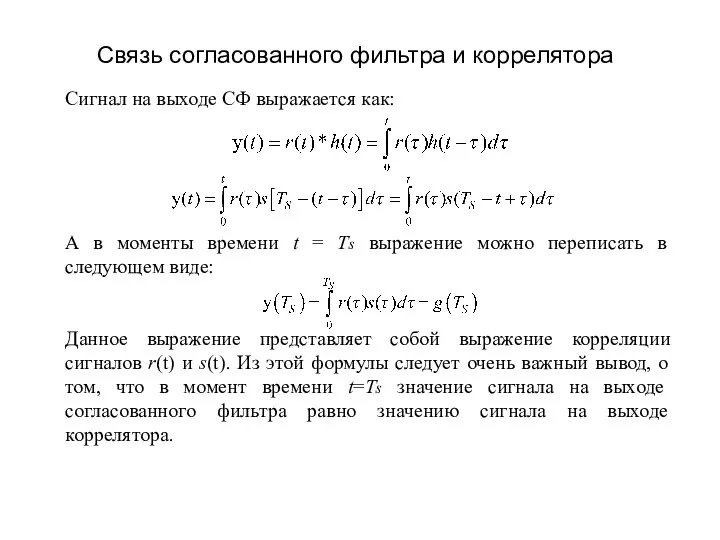
Связь согласованного фильтра и коррелятора
Сигнал на выходе СФ выражается как:
А в
Связь согласованного фильтра и коррелятора
Сигнал на выходе СФ выражается как:
А в
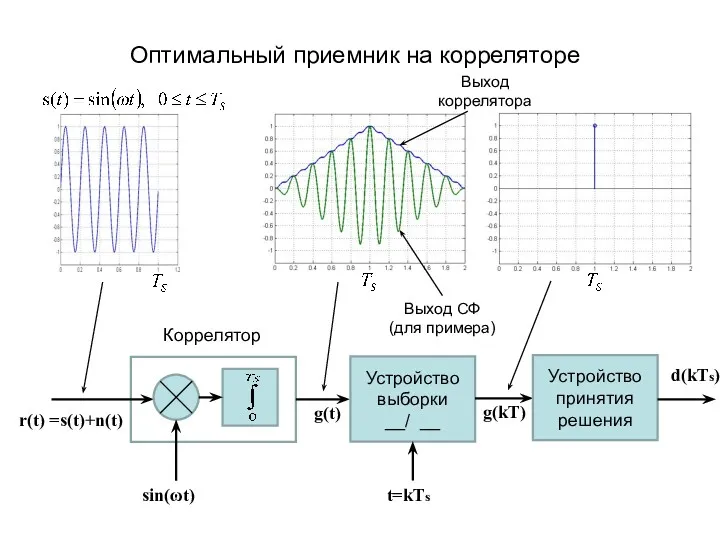
Оптимальный приемник на корреляторе
r(t) =s(t)+n(t)
g(t)
Коррелятор
Устройство выборки
__/ __
sin(ωt)
g(kT)
Устройство принятия решения
Выход
коррелятора
Выход
Оптимальный приемник на корреляторе
r(t) =s(t)+n(t)
g(t)
Коррелятор
Устройство выборки
__/ __
sin(ωt)
g(kT)
Устройство принятия решения
Выход
коррелятора
Выход
Когерентный и некогерентный прием
Когерентным приемом называется прием, при котором начальная фаза
Когерентный и некогерентный прием
Когерентным приемом называется прием, при котором начальная фаза
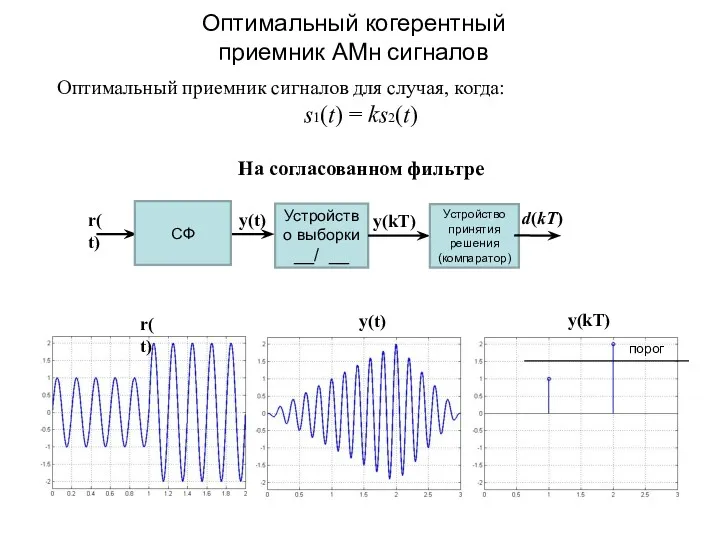
Оптимальный когерентный
приемник АМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
Оптимальный когерентный
приемник АМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
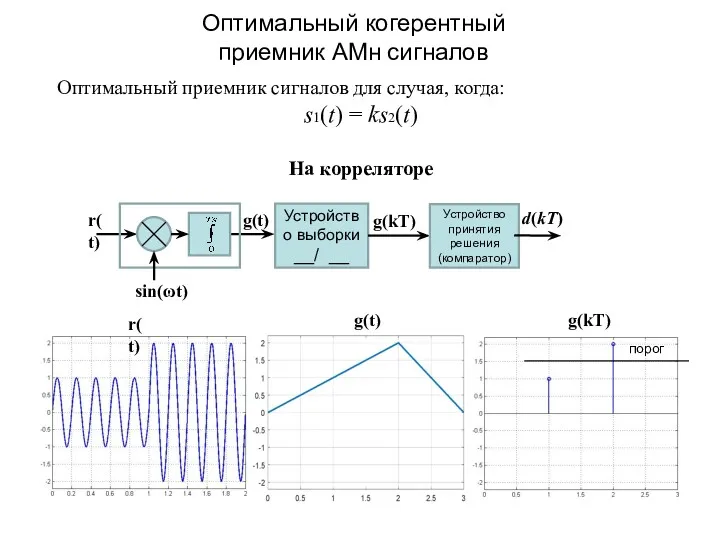
Оптимальный когерентный
приемник АМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
Оптимальный когерентный
приемник АМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
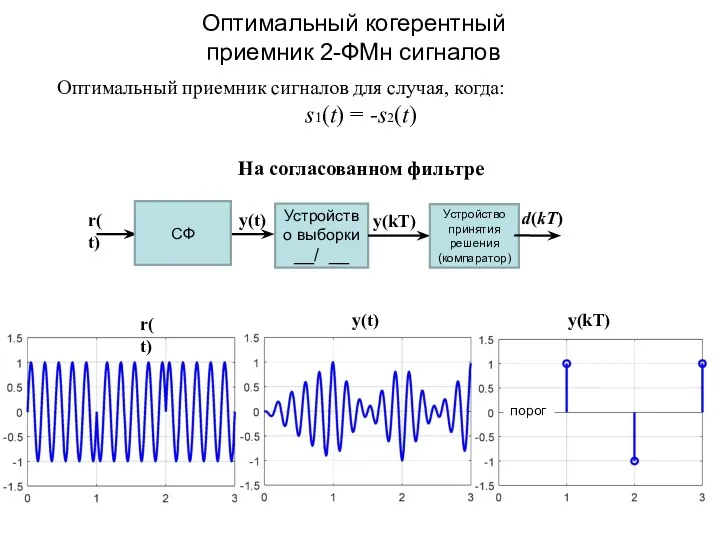
Оптимальный когерентный
приемник 2-ФМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
Оптимальный когерентный
приемник 2-ФМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
Оптимальный когерентный
приемник 2-ФМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
Оптимальный когерентный
приемник 2-ФМн сигналов
Оптимальный приемник сигналов для случая, когда:
s1(t) =
Оптимальный когерентный приемник
2-ЧМн сигналов
r(t)
y1(t)
Устройство выборки
__/ __
t=kT
y1(kT)
Устройство принятия решения
d(kT)
y2(t)
Устройство выборки
__/ __
y2(kT)
Оптимальный приемник
Оптимальный когерентный приемник
2-ЧМн сигналов
r(t)
y1(t)
Устройство выборки
__/ __
t=kT
y1(kT)
Устройство принятия решения
d(kT)
y2(t)
Устройство выборки
__/ __
y2(kT)
Оптимальный приемник
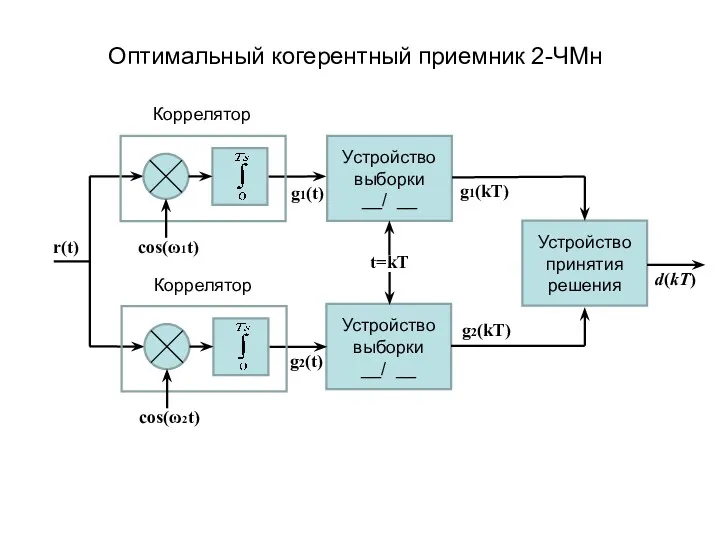
Оптимальный когерентный приемник 2-ЧМн
r(t)
g1(t)
Устройство выборки
__/ __
t=kT
g1(kT)
Устройство принятия решения
d(kT)
g2(t)
Устройство выборки
__/ __
g2(kT)
Коррелятор
cos(ω1t)
Коррелятор
cos(ω2t)
Оптимальный когерентный приемник 2-ЧМн
r(t)
g1(t)
Устройство выборки
__/ __
t=kT
g1(kT)
Устройство принятия решения
d(kT)
g2(t)
Устройство выборки
__/ __
g2(kT)
Коррелятор
cos(ω1t)
Коррелятор
cos(ω2t)
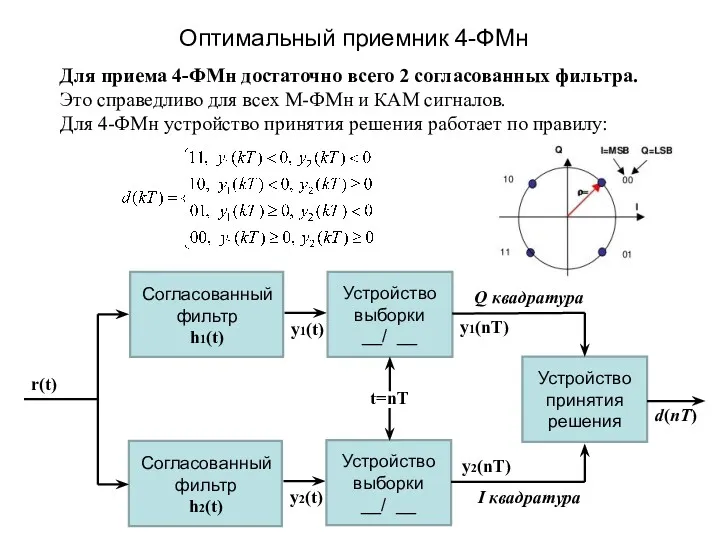
Оптимальный приемник 4-ФМн
r(t)
y1(t)
Устройство выборки
__/ __
t=nT
y1(nT)
Устройство принятия решения
d(nT)
y2(t)
Устройство выборки
__/ __
y2(nT)
Для приема 4-ФМн
Оптимальный приемник 4-ФМн
r(t)
y1(t)
Устройство выборки
__/ __
t=nT
y1(nT)
Устройство принятия решения
d(nT)
y2(t)
Устройство выборки
__/ __
y2(nT)
Для приема 4-ФМн
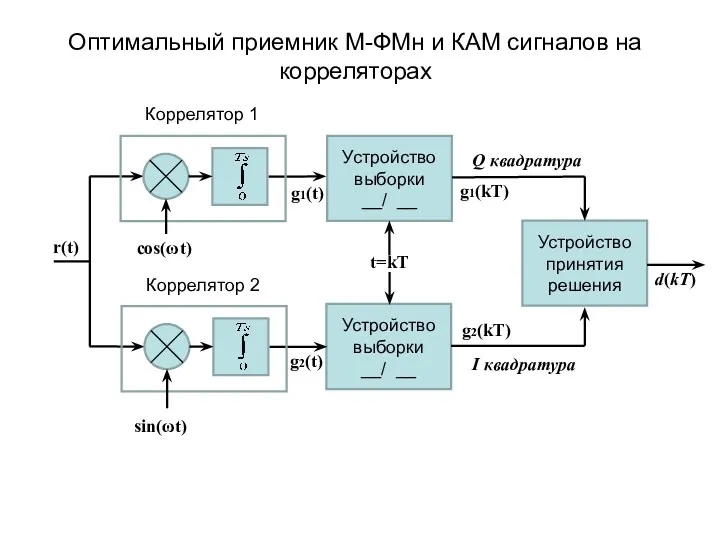
Оптимальный приемник М-ФМн и КАМ сигналов на корреляторах
r(t)
g1(t)
Устройство выборки
__/ __
t=kT
g1(kT)
Устройство принятия
Оптимальный приемник М-ФМн и КАМ сигналов на корреляторах
r(t)
g1(t)
Устройство выборки
__/ __
t=kT
g1(kT)
Устройство принятия
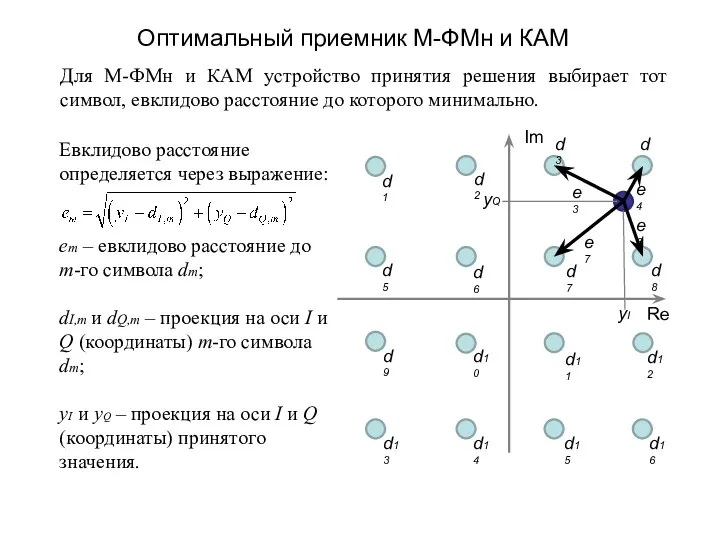
Евклидово расстояние определяется через выражение:
em – евклидово расстояние до m-го символа
Евклидово расстояние определяется через выражение:
em – евклидово расстояние до m-го символа
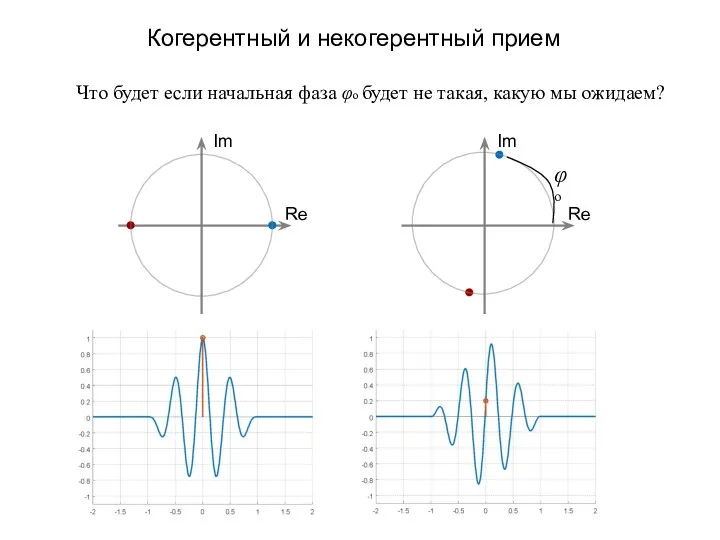
Когерентный и некогерентный прием
Что будет если начальная фаза φо будет не
Когерентный и некогерентный прием
Что будет если начальная фаза φо будет не
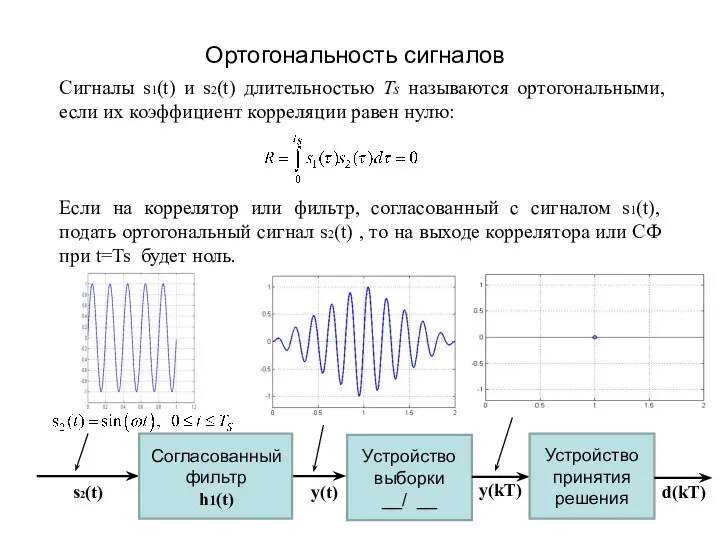
Ортогональность сигналов
Сигналы s1(t) и s2(t) длительностью Тs называются ортогональными, если
Ортогональность сигналов
Сигналы s1(t) и s2(t) длительностью Тs называются ортогональными, если
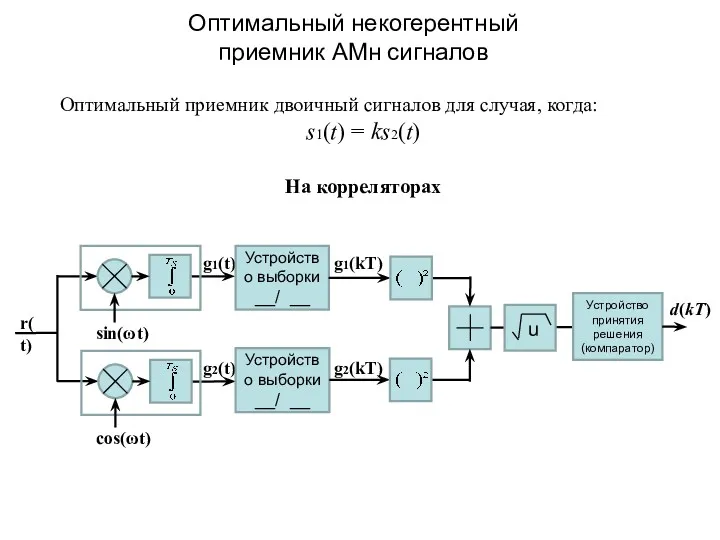
Оптимальный некогерентный
приемник АМн сигналов
Оптимальный приемник двоичный сигналов для случая, когда:
s1(t)
Оптимальный некогерентный
приемник АМн сигналов
Оптимальный приемник двоичный сигналов для случая, когда:
s1(t)
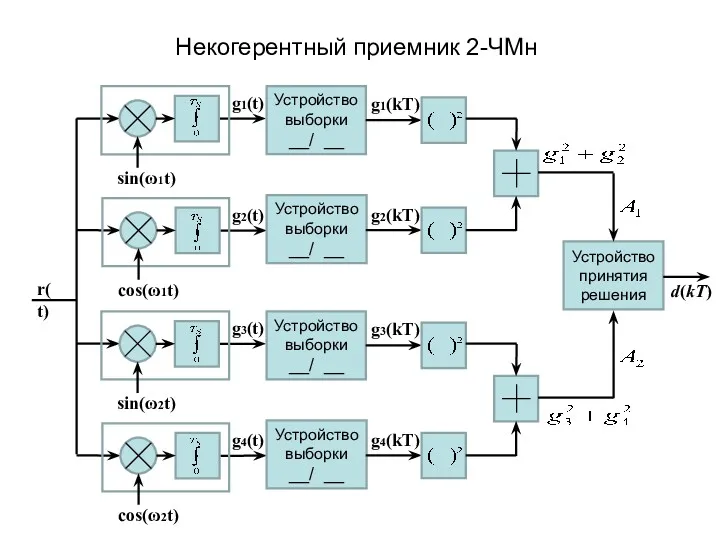
Некогерентный приемник 2-ЧМн
g1(t)
Устройство выборки
__/ __
g1(kT)
Устройство принятия решения
d(kT)
g2(t)
g2(kT)
sin(ω1t)
cos(ω1t)
Устройство выборки
__/ __
r(t)
g3(t)
Устройство выборки
__/ __
g3(kT)
g4(t)
g4(kT)
sin(ω2t)
cos(ω2t)
Устройство
Некогерентный приемник 2-ЧМн
g1(t)
Устройство выборки
__/ __
g1(kT)
Устройство принятия решения
d(kT)
g2(t)
g2(kT)
sin(ω1t)
cos(ω1t)
Устройство выборки
__/ __
r(t)
g3(t)
Устройство выборки
__/ __
g3(kT)
g4(t)
g4(kT)
sin(ω2t)
cos(ω2t)
Устройство
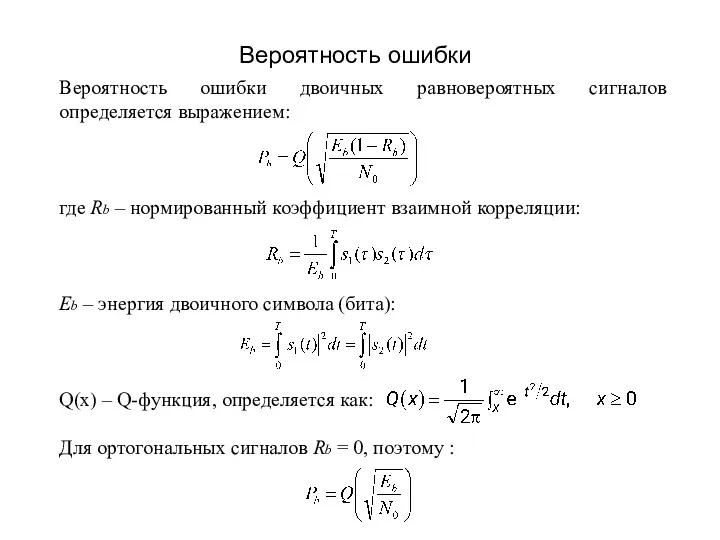
Вероятность ошибки двоичных равновероятных сигналов определяется выражением:
где Rb – нормированный коэффициент
Вероятность ошибки двоичных равновероятных сигналов определяется выражением:
где Rb – нормированный коэффициент
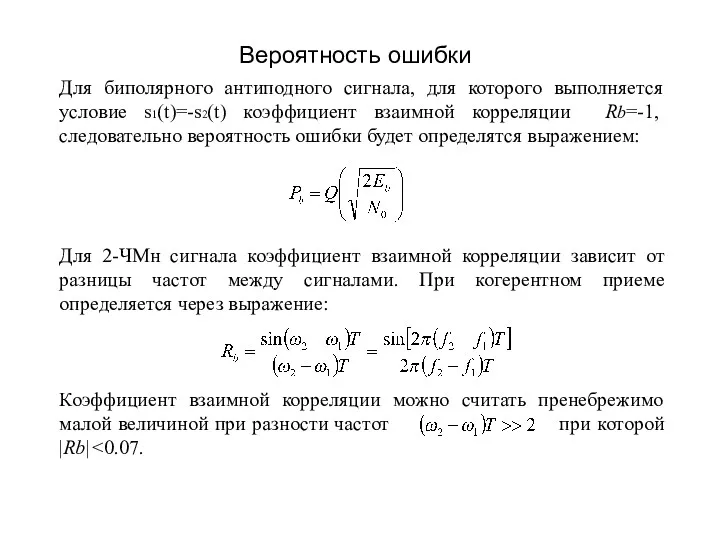
Для биполярного антиподного сигнала, для которого выполняется условие s1(t)=-s2(t) коэффициент взаимной
Для биполярного антиподного сигнала, для которого выполняется условие s1(t)=-s2(t) коэффициент взаимной
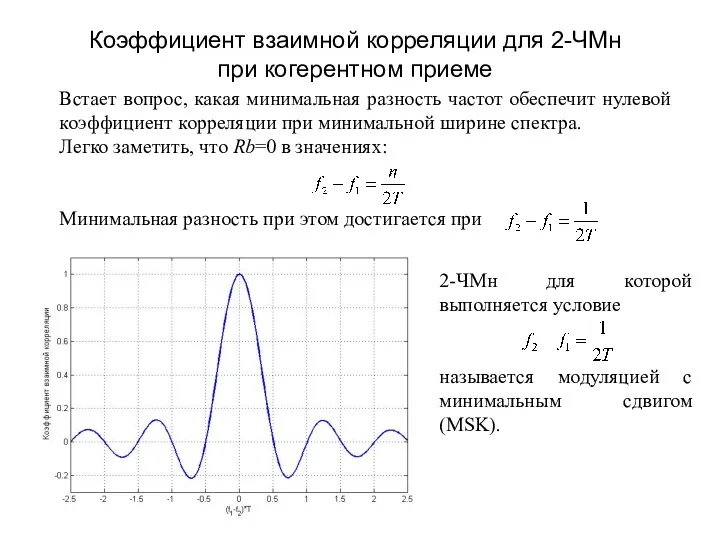
Коэффициент взаимной корреляции для 2-ЧМн
при когерентном приеме
Встает вопрос, какая минимальная
Коэффициент взаимной корреляции для 2-ЧМн
при когерентном приеме
Встает вопрос, какая минимальная
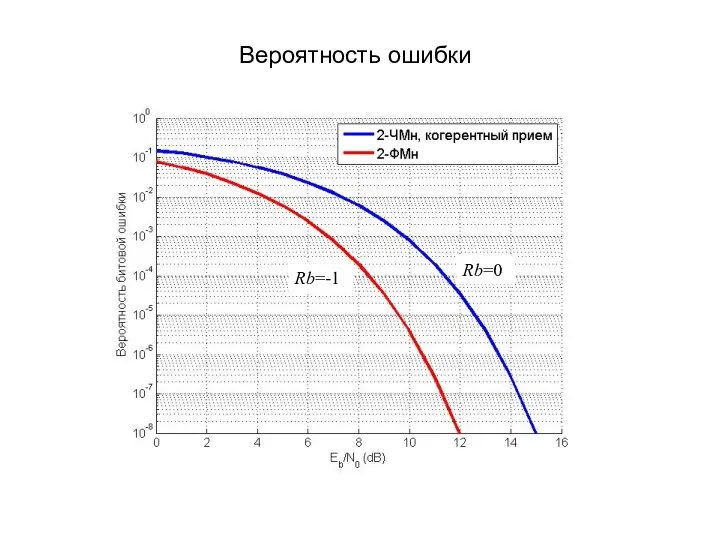
Вероятность ошибки
Rb=0
Rb=-1
Вероятность ошибки
Rb=0
Rb=-1
 Поздравляю с Новым годом
Поздравляю с Новым годом Архитектура Саратова
Архитектура Саратова Поле, його властивості
Поле, його властивості Здоровый образ жизни, мы против расизма
Здоровый образ жизни, мы против расизма Мембранные липиды: строение и функции
Мембранные липиды: строение и функции Биологические особенности и технология выращивания огурца в открытом грунте
Биологические особенности и технология выращивания огурца в открытом грунте Презентация к уроку
Презентация к уроку Приёмники оптического излучения
Приёмники оптического излучения Презентация к уроку Поэты Ставрополья о родном крае и о природе родного края
Презентация к уроку Поэты Ставрополья о родном крае и о природе родного края Презентация С.Т.Аксаков - певец родной природы
Презентация С.Т.Аксаков - певец родной природы Ответственность в хозяйственном праве
Ответственность в хозяйственном праве Классный час Моя малая Родина
Классный час Моя малая Родина Радуга творчества
Радуга творчества Погода и климат
Погода и климат Деталь беттерін металдармен қорытпалармен жабу
Деталь беттерін металдармен қорытпалармен жабу Анализ портфеля акций
Анализ портфеля акций Духовно-нравственное воспитание учащихся
Духовно-нравственное воспитание учащихся Основные элементы базовой нотации языка UML
Основные элементы базовой нотации языка UML Церковь Одигитрии Смоленской (XVII в) - символ Вязьмы
Церковь Одигитрии Смоленской (XVII в) - символ Вязьмы Благоустройство территории района Богородское города Москвы в 2020 г
Благоустройство территории района Богородское города Москвы в 2020 г Наряд для семейного обеда (урок технологии в 6 классе)
Наряд для семейного обеда (урок технологии в 6 классе) Санитарное просвещение и гигиеническое воспитание населения
Санитарное просвещение и гигиеническое воспитание населения Презентация Заповеди Блаженствпо предмету ОПК
Презентация Заповеди Блаженствпо предмету ОПК Воронецкая (2)
Воронецкая (2) Помощь подростку в выборе профессии
Помощь подростку в выборе профессии ПРЕЗЕНТАЦИЯ о животных
ПРЕЗЕНТАЦИЯ о животных Всероссийский образовательный командный турнир Знайки (2-4 классы)
Всероссийский образовательный командный турнир Знайки (2-4 классы) Промывочные агрегаты
Промывочные агрегаты