Организация работ по техническому обслуживанию, ремонту и испытаниям промышленных роботов презентация
- Организация работ по техническому обслуживанию, ремонту и испытаниям промышленных роботов

Содержание
- 2. Целями дисциплины «Организация работ по техническому обслуживанию, ремонту и испытаниям промышленных роботов » является приобретение студентами
- 3. Рекомендуемая литература а) основная литература Воробьев, В. А. Эксплуатация и ремонт электрооборудования и средств автоматизации :
- 4. Раздел 1. ВВЕДЕНИЕ
- 5. РОБОТОТЕХНИКА – новая и интенсивно развивающаяся научно-техническая дисциплина, изучающая теорию, расчет и конструирование роботов и их
- 6. обеспечение стабильного качества продукции, не подверженного влиянию субъективных факторов, присущих рабочему-человеку; высвобождение рабочей силы, уменьшающее и
- 7. Раздел 2. ОБЩИЕ СВЕДЕНИЯ О ПРОМЫШЛЕННЫХ РОБОТАХ
- 8. 2.1 Исторический аспект развития робототехники ПЕРВЫЙ ЭТАП В I в. н. э. Герон Александрийский и другие
- 9. 2.1 Исторический аспект развития робототехники ТРЕТИЙ ЭТАП В 1920 г. чешский писатель Карел Чапек в своей
- 10. 2.2 Основные понятия и определения РОБОТ – это автономно функционирующая универсальная автоматическая машина, предназначенная для воспроизведения
- 11. 2.2 Основные понятия и определения РАБОЧИЙ ОРГАН ПР – составная часть исполнительного устройства ПР для непосредственного
- 12. 2.3 Обобщенная структурная схема робота и функции его систем Робот, активно взаимодействующий с окружающей средой, в
- 13. 2.3 Обобщенная структурная схема робота и функции его систем УПРАВЛЯЮЩАЯ СИСТЕМА – это «мозг» робота, который
- 14. 2.3 Обобщенная структурная схема робота и функции его систем ИСПОЛНИТЕЛЬНАЯ СИСТЕМА («МОТОРИКА») робота – это устройства,
- 15. 2.4 Классификация роботов 2.4.1 По поколениям: РОБОТЫ ПЕРВОГО ПОКОЛЕНИЯ – это роботы с программным управлением (ПР
- 16. 2.4 Классификация роботов (2.4.1 По поколениям) РОБОТЫ ВТОРОГО ПОКОЛЕНИЯ – это очувствленные роботы (ОР), предназначенные для
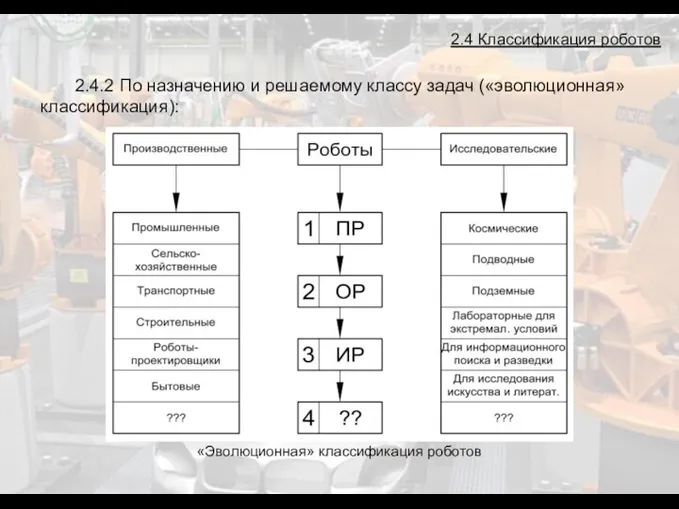
- 17. 2.4 Классификация роботов 2.4.2 По назначению и решаемому классу задач («эволюционная» классификация): «Эволюционная» классификация роботов
- 18. 2.4 Классификация роботов (2.4.2 «Эволюционная» классификация) ПРОИЗВОДСТВЕННЫЕ РОБОТЫ – это роботы, предназначенные для выполнения тяжелой, монотонной,
- 19. 2.4 Классификация роботов (2.4.2 «Эволюционная» классификация) По специализации ПР подразделяют на: Специальные, выполняющие строго определенные технологические
- 20. 2.4 Классификация роботов (2.4.2 «Эволюционная» классификация) РОБОТЫ-ПРОЕКТИРОВЩИКИ применяют для автоматизированного расчета и проектирования машин и сооружений,
- 21. 2.4 Классификация роботов 2.4.3 По методу управления: Классификация роботов по методу управления БИОТЕХНИЧЕСКИЕ РОБОТЫ функционируют только
- 22. 2.4 Классификация роботов (2.4.3 По методу управления) ЭКЗОСКЕЛЕТОНЫ – это антропоморфные конструкции, обычно «надеваемые» на тело
- 23. 2.4 Классификация роботов (2.4.3 По методу управления) ИНТЕРАКТИВНЫЕ РОБОТЫ, в отличие от биотехнических, имеют устройства памяти
- 24. 2.4 Классификация роботов 2.4.4 По принципу управления По принципу управления роботы можно разделить на виды, соответствующие
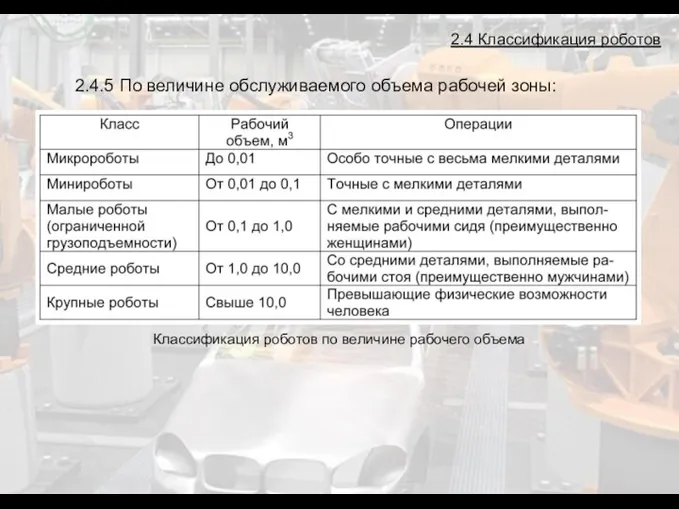
- 25. 2.4 Классификация роботов 2.4.5 По величине обслуживаемого объема рабочей зоны: Классификация роботов по величине рабочего объема
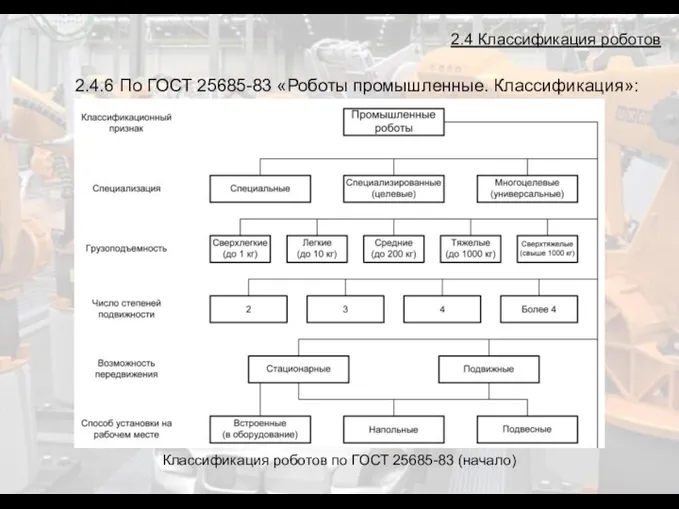
- 26. 2.4 Классификация роботов 2.4.6 По ГОСТ 25685-83 «Роботы промышленные. Классификация»: Классификация роботов по ГОСТ 25685-83 (начало)
- 27. 2.4 Классификация роботов (2.4.6 По ГОСТ 25685-83) Классификация роботов по ГОСТ 25685-83 (окончание)
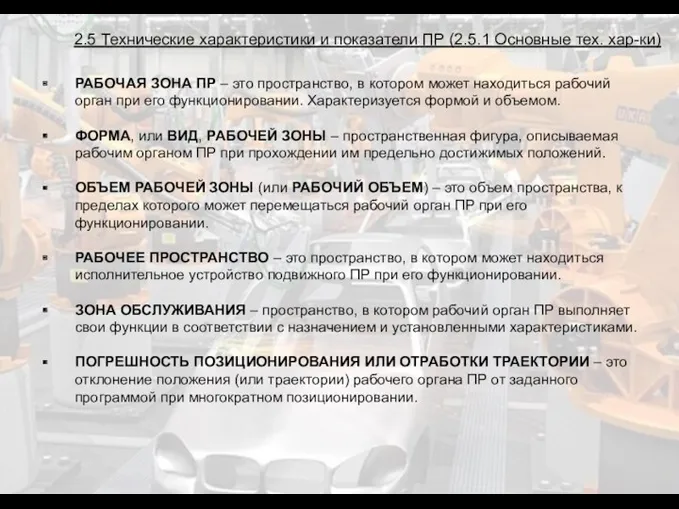
- 28. 2.5 Технические характеристики и показатели ПР 2.5.1 Основные технические характеристики: НОМИНАЛЬНАЯ ГРУЗОПОДЪЕМНОСТЬ ПР – наибольшее значение
- 29. 2.5 Технические характеристики и показатели ПР (2.5.1 Основные тех. хар-ки) РАБОЧАЯ ЗОНА ПР – это пространство,
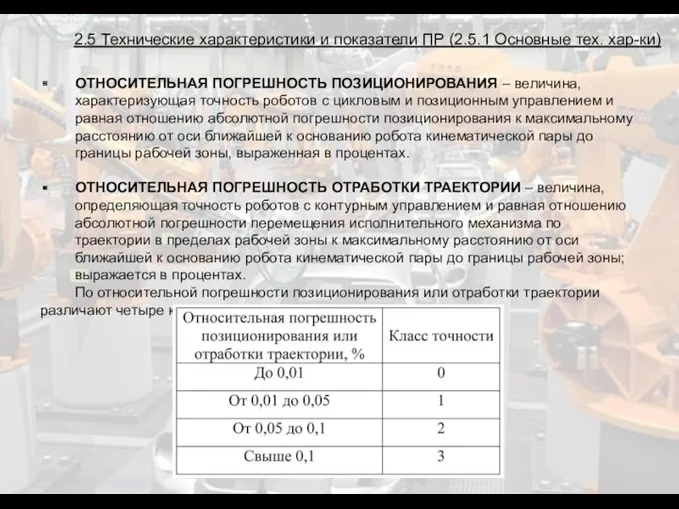
- 30. 2.5 Технические характеристики и показатели ПР (2.5.1 Основные тех. хар-ки) ОТНОСИТЕЛЬНАЯ ПОГРЕШНОСТЬ ПОЗИЦИОНИРОВАНИЯ – величина, характеризующая
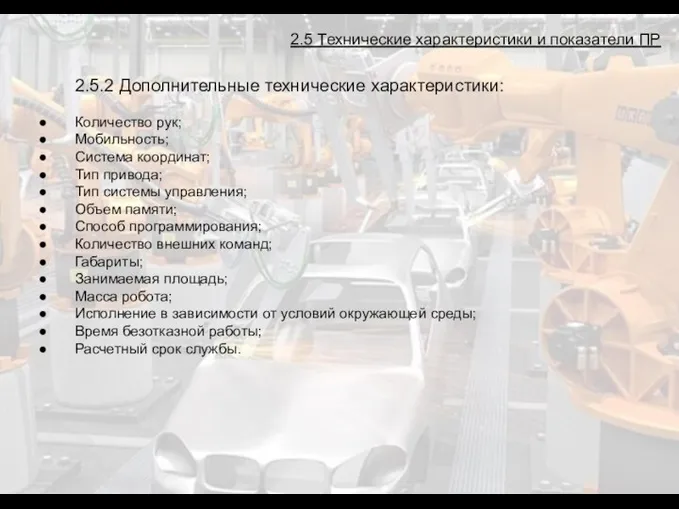
- 31. 2.5 Технические характеристики и показатели ПР 2.5.2 Дополнительные технические характеристики: Количество рук; Мобильность; Система координат; Тип
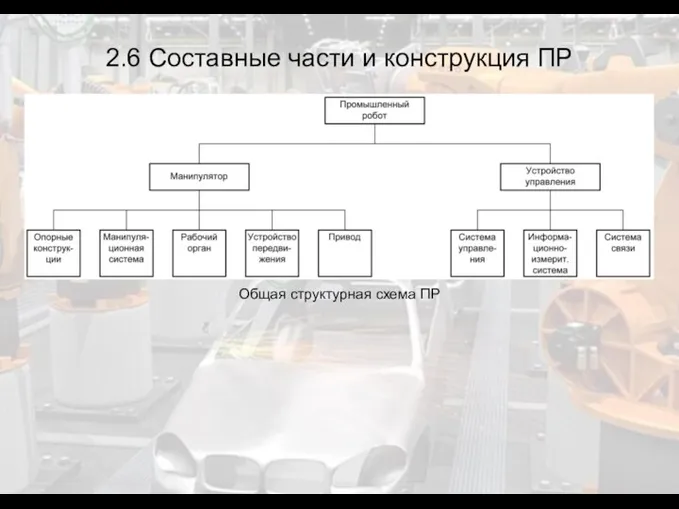
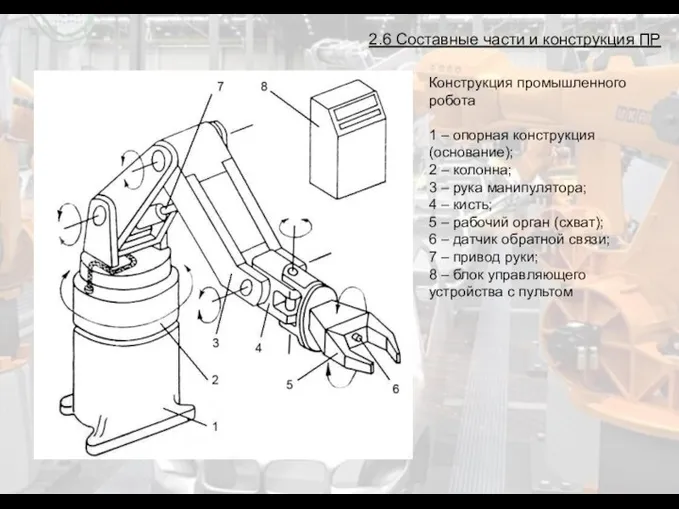
- 32. 2.6 Составные части и конструкция ПР Общая структурная схема ПР
- 33. 2.6 Составные части и конструкция ПР Конструкция промышленного робота 1 – опорная конструкция (основание); 2 –
- 34. Раздел 3. КОНСТРУКТИВНОЕ УСТРОЙСТВО И МЕХАНИКА ПРОМЫШЛЕННЫХ РОБОТОВ
- 35. 3.1 Манипуляционная система 3.1.1 Общая характеристика МАНИПУЛЯЦИОННАЯ СИСТЕМА (МС) или МАНИПУЛЯТОР ПР – это многозвенный пространственный
- 36. 3.1 Манипуляционная система (3.1.1 Общая характеристика) Условные обозначения элементов структурных и кинематических схем
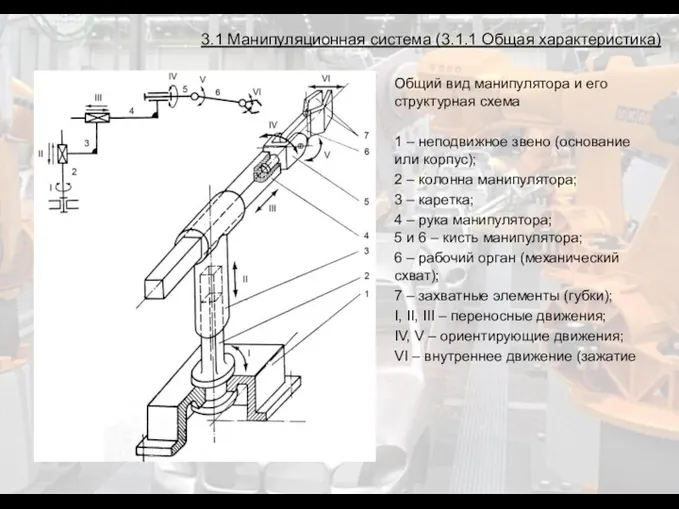
- 37. 3.1 Манипуляционная система (3.1.1 Общая характеристика) Общий вид манипулятора и его структурная схема 1 – неподвижное
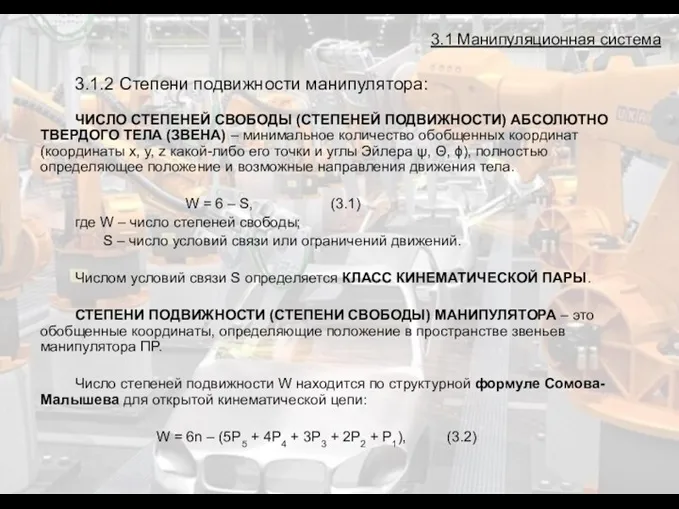
- 38. 3.1 Манипуляционная система 3.1.2 Степени подвижности манипулятора: ЧИСЛО СТЕПЕНЕЙ СВОБОДЫ (СТЕПЕНЕЙ ПОДВИЖНОСТИ) АБСОЛЮТНО ТВЕРДОГО ТЕЛА (ЗВЕНА)
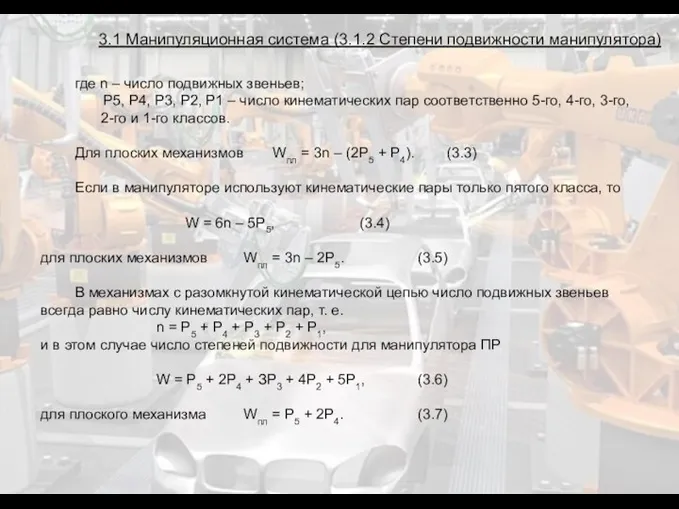
- 39. 3.1 Манипуляционная система (3.1.2 Степени подвижности манипулятора) где n – число подвижных звеньев; P5, P4, P3,
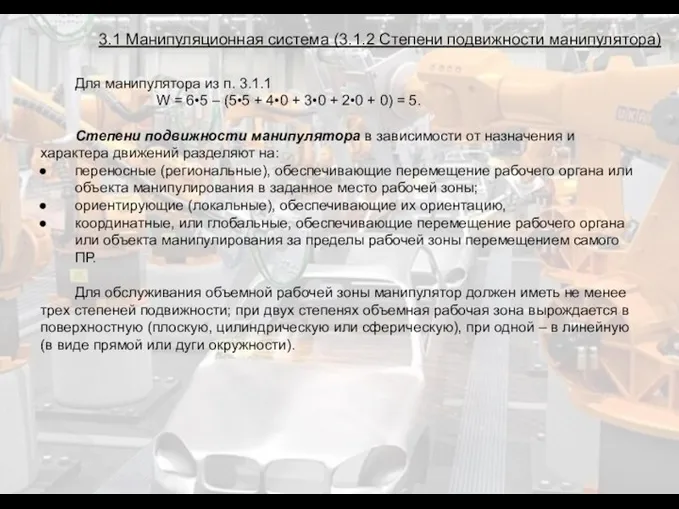
- 40. 3.1 Манипуляционная система (3.1.2 Степени подвижности манипулятора) Для манипулятора из п. 3.1.1 W = 6•5 –
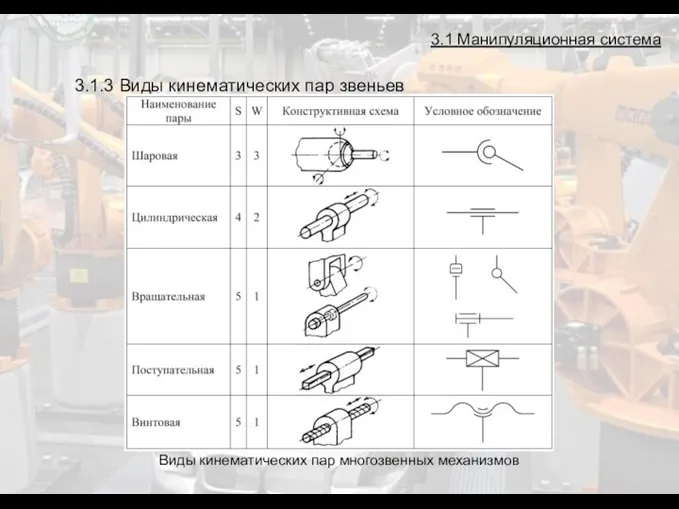
- 41. 3.1 Манипуляционная система 3.1.3 Виды кинематических пар звеньев Виды кинематических пар многозвенных механизмов
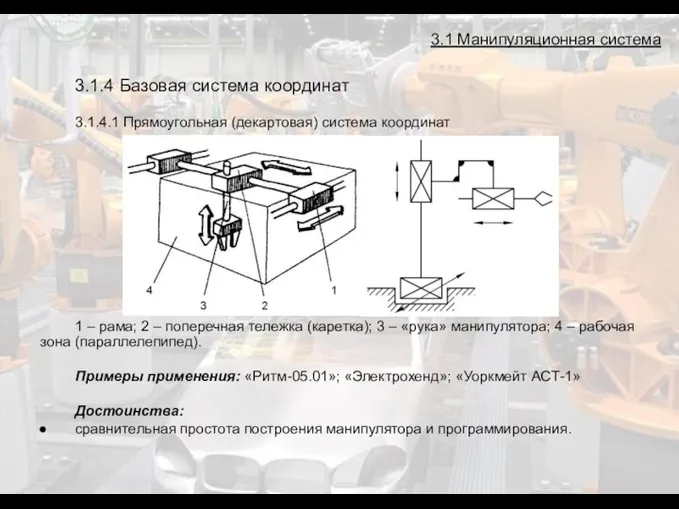
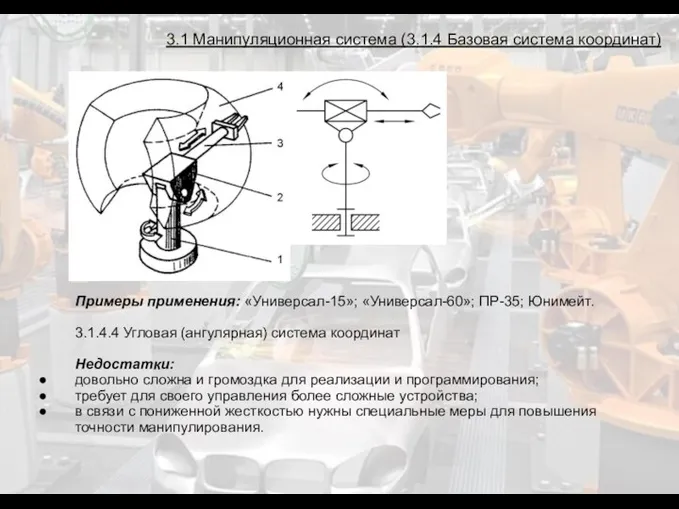
- 42. 3.1 Манипуляционная система 3.1.4 Базовая система координат 3.1.4.1 Прямоугольная (декартовая) система координат 1 – рама; 2
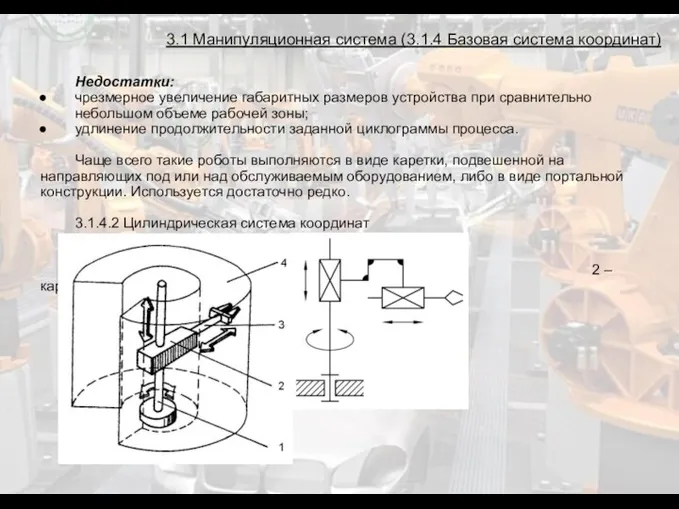
- 43. 3.1 Манипуляционная система (3.1.4 Базовая система координат) Недостатки: чрезмерное увеличение габаритных размеров устройства при сравнительно небольшом
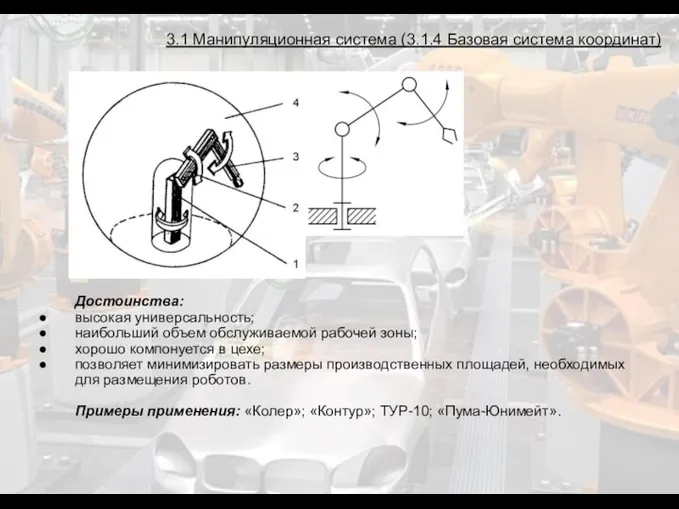
- 44. 3.1 Манипуляционная система (3.1.4 Базовая система координат) Достоинства: - обеспечение обслуживания большого объема рабочего пространства; -
- 45. 3.1 Манипуляционная система (3.1.4 Базовая система координат) 1 – вращающаяся колонна; 2 – поворотная (качающаяся) каретка;
- 46. 3.1 Манипуляционная система (3.1.4 Базовая система координат) 1 – вращающаяся колонна; 2 – «плечо»; 3 –
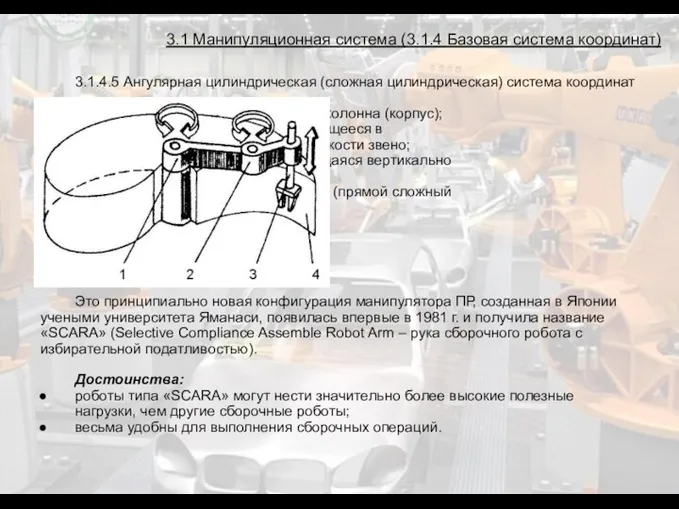
- 47. 3.1 Манипуляционная система (3.1.4 Базовая система координат) 3.1.4.5 Ангулярная цилиндрическая (сложная цилиндрическая) система координат 1 –
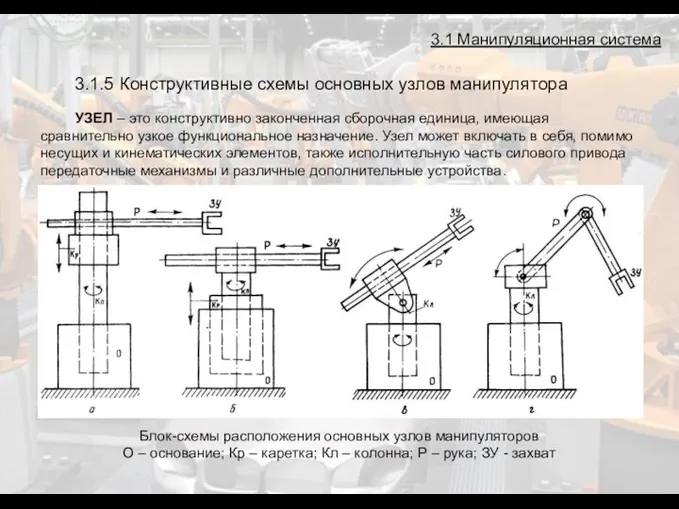
- 48. 3.1 Манипуляционная система 3.1.5 Конструктивные схемы основных узлов манипулятора УЗЕЛ – это конструктивно законченная сборочная единица,
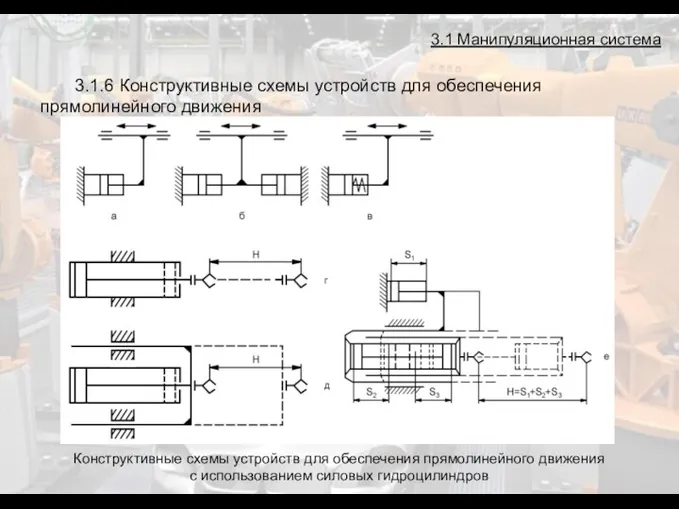
- 49. 3.1 Манипуляционная система 3.1.6 Конструктивные схемы устройств для обеспечения прямолинейного движения Конструктивные схемы устройств для обеспечения
- 50. 3.1 Манипуляционная система (3.1.6 Схемы для прямолинейного движения) Схемы устройств для создания прямолинейного движения: а -
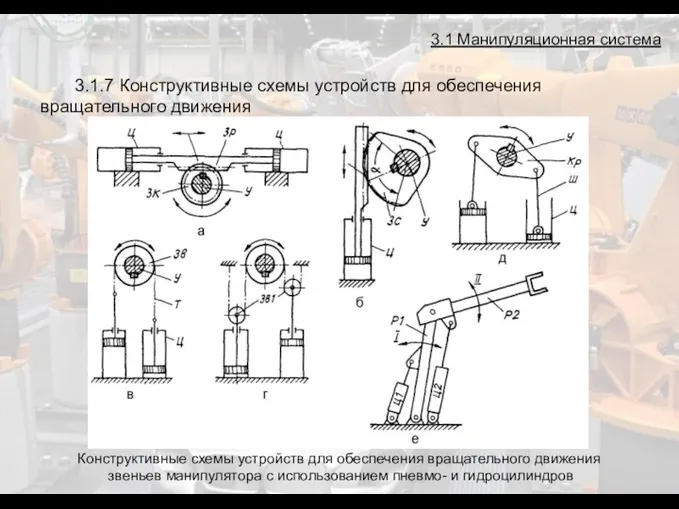
- 51. 3.1 Манипуляционная система 3.1.7 Конструктивные схемы устройств для обеспечения вращательного движения Конструктивные схемы устройств для обеспечения
- 52. 3.1 Манипуляционная система (3.1.7 Схемы для вращательного движения) Схема устройств для создания вращательного движения от мотора
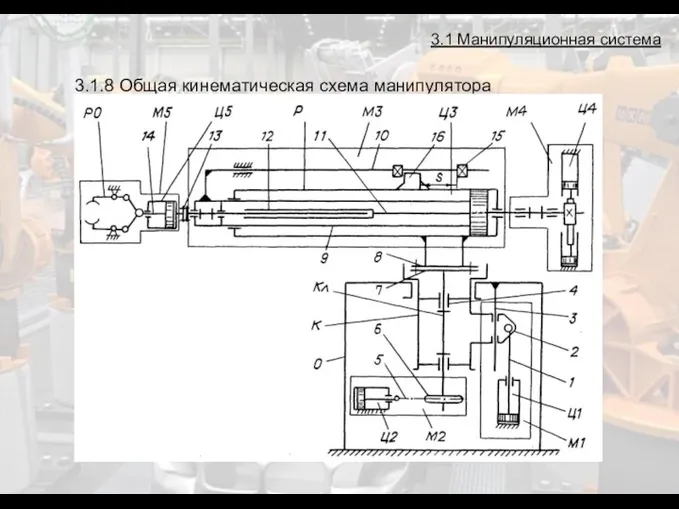
- 53. 3.1 Манипуляционная система 3.1.8 Общая кинематическая схема манипулятора
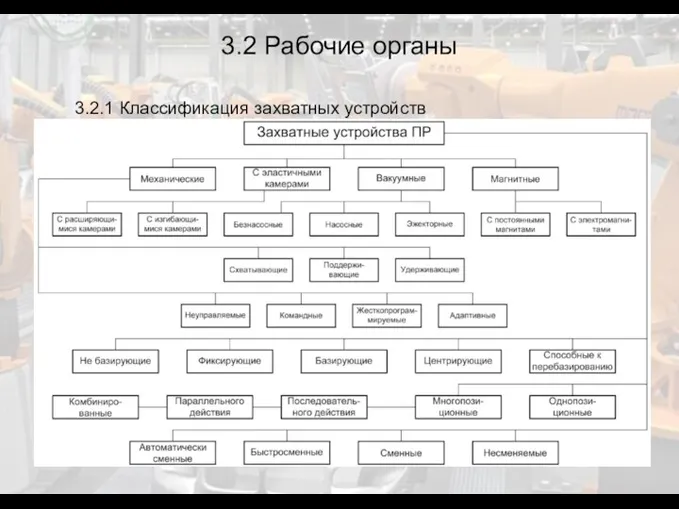
- 54. 3.2 Рабочие органы 3.2.1 Классификация захватных устройств
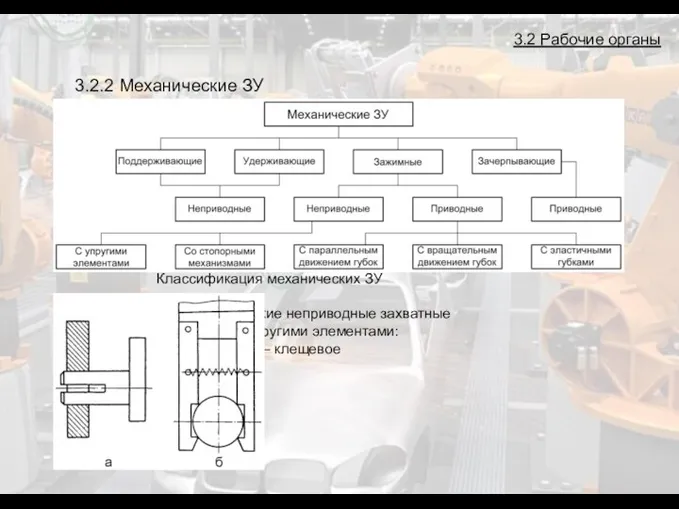
- 55. 3.2 Рабочие органы 3.2.2 Механические ЗУ Классификация механических ЗУ Механические неприводные захватные устройства с упругими элементами:
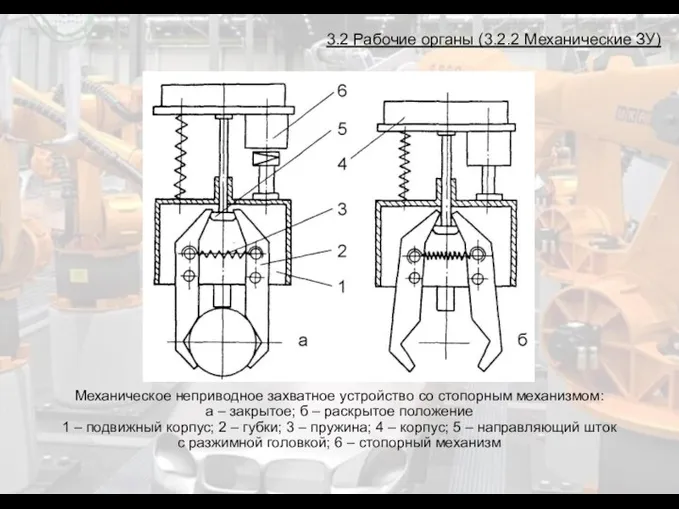
- 56. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Механическое неприводное захватное устройство со стопорным механизмом: а – закрытое;
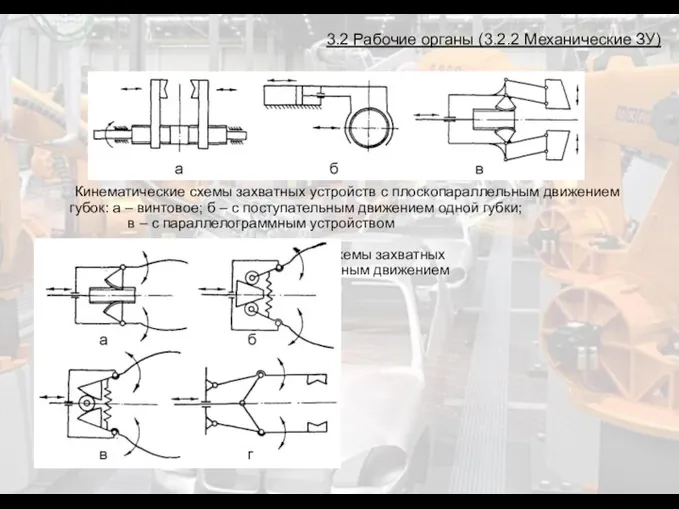
- 57. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Кинематические схемы захватных устройств с плоскопараллельным движением губок: а –
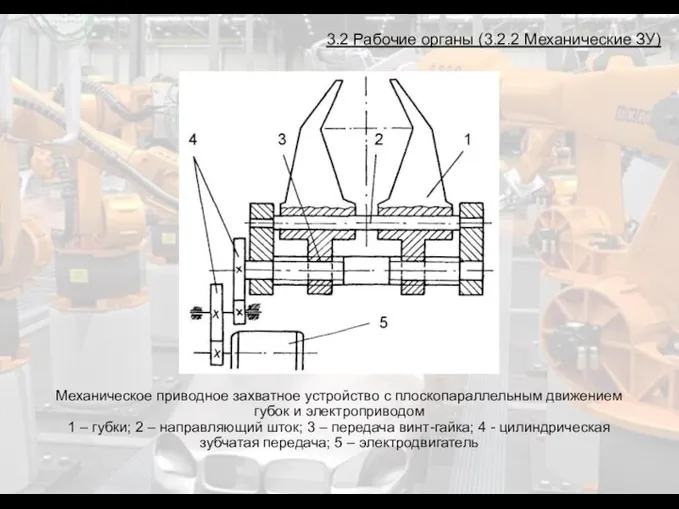
- 58. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Механическое приводное захватное устройство с плоскопараллельным движением губок и электроприводом
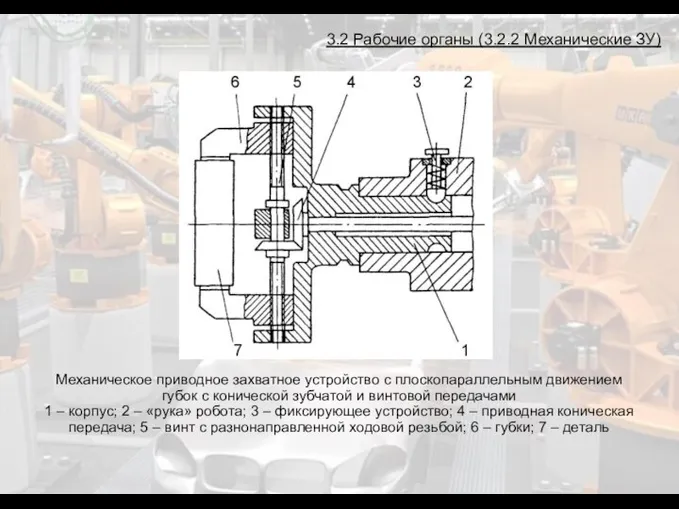
- 59. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Механическое приводное захватное устройство с плоскопараллельным движением губок с конической
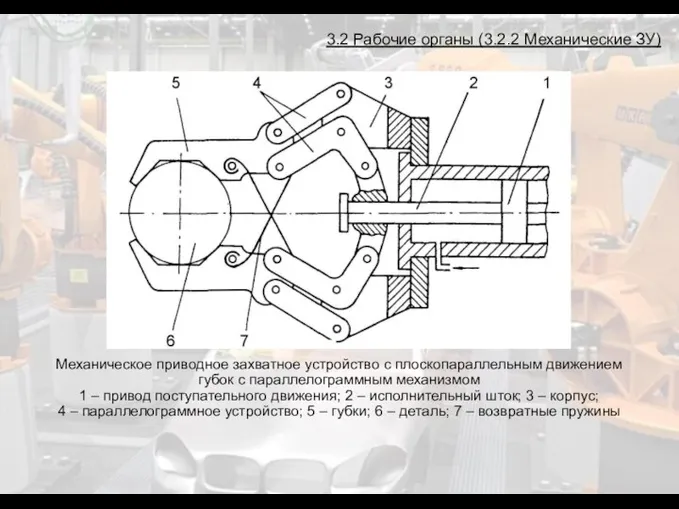
- 60. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Механическое приводное захватное устройство с плоскопараллельным движением губок с параллелограммным
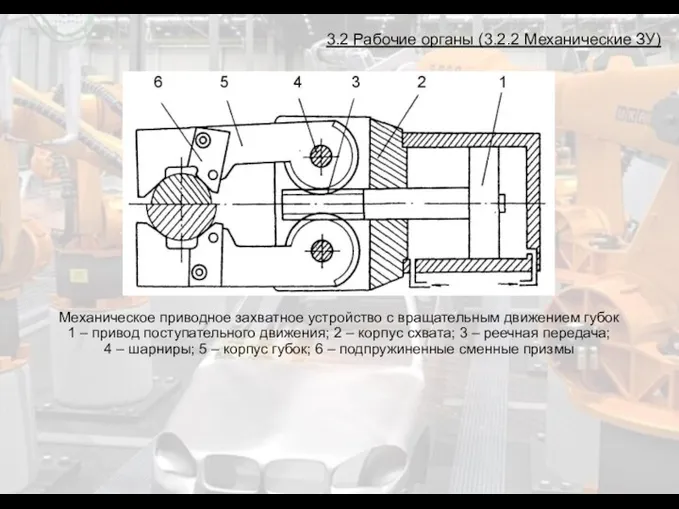
- 61. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Механическое приводное захватное устройство с вращательным движением губок 1 –
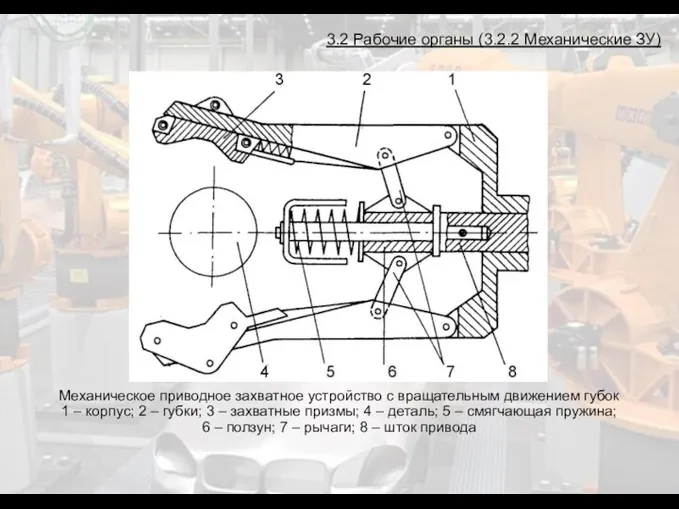
- 62. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Механическое приводное захватное устройство с вращательным движением губок 1 –
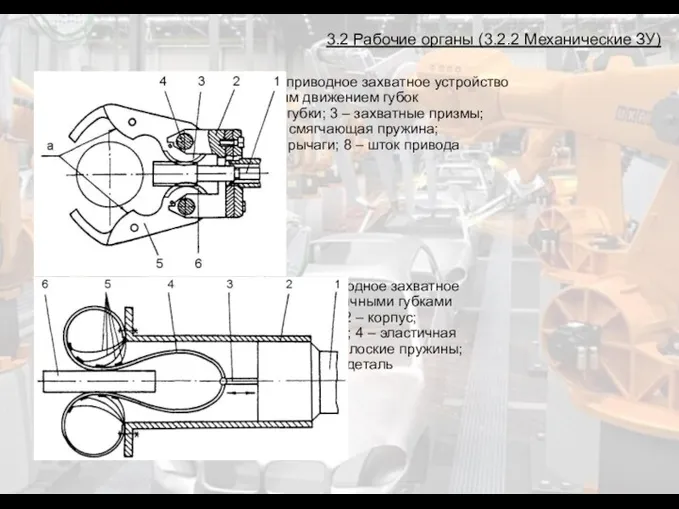
- 63. 3.2 Рабочие органы (3.2.2 Механические ЗУ) Механическое приводное захватное устройство с вращательным движением губок 1 –
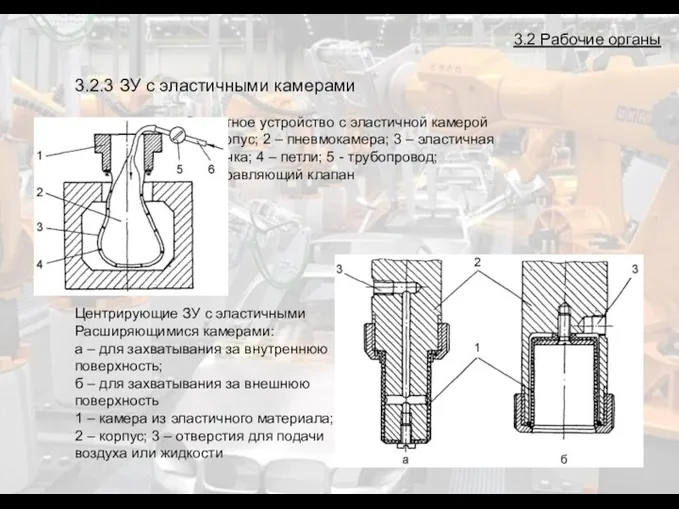
- 64. 3.2 Рабочие органы 3.2.3 ЗУ с эластичными камерами Захватное устройство с эластичной камерой 1 – корпус;
- 65. 3.2 Рабочие органы (3.2.3 ЗУ с эластичными камерами) Захватное устройство с изгибающимися эластичными камерами 1 –
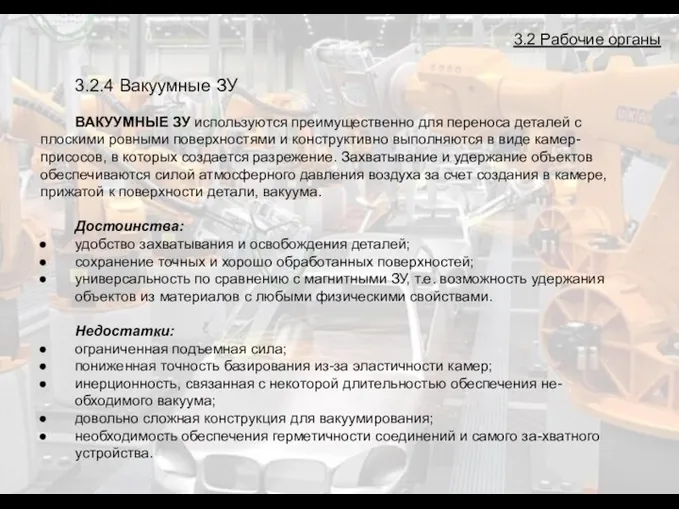
- 66. 3.2 Рабочие органы 3.2.4 Вакуумные ЗУ ВАКУУМНЫЕ ЗУ используются преимущественно для переноса деталей с плоскими ровными
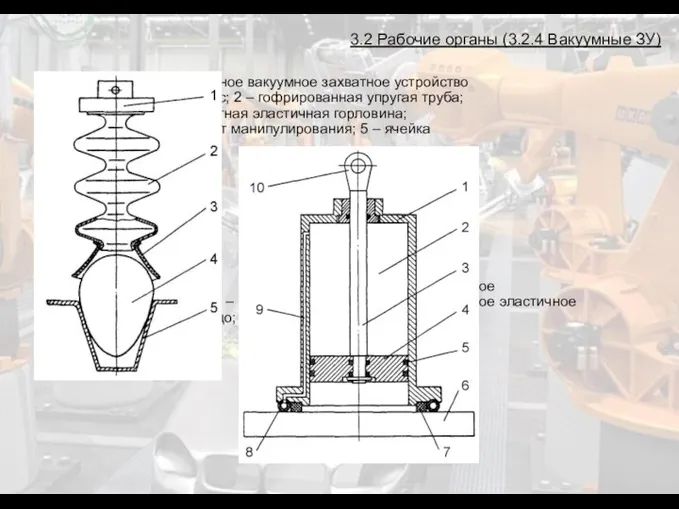
- 67. 3.2 Рабочие органы (3.2.4 Вакуумные ЗУ) Безнасосное вакуумное захватное устройство 1 – корпус; 2 – гофрированная
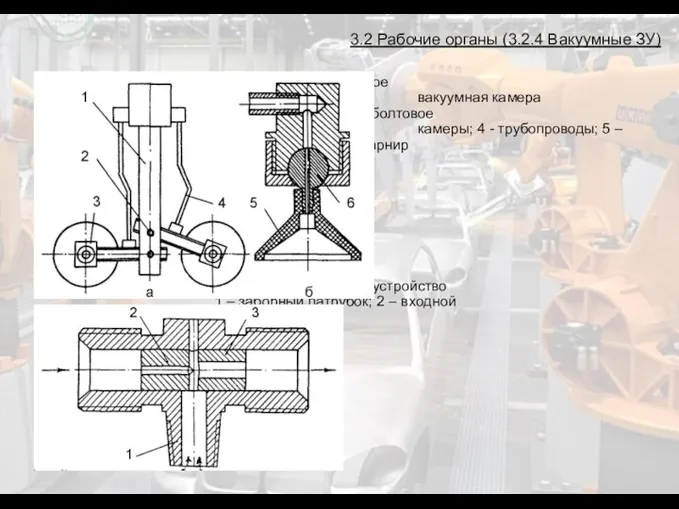
- 68. 3.2 Рабочие органы (3.2.4 Вакуумные ЗУ) Вакуумное захватное устройство: а – общий вид; б – вакуумная
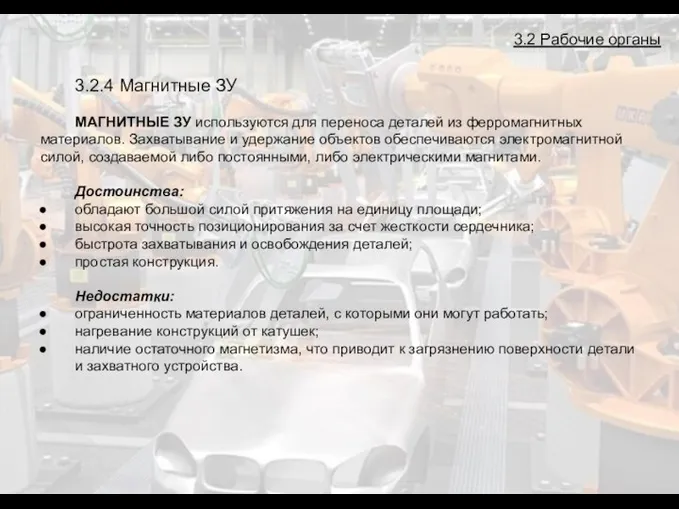
- 69. 3.2 Рабочие органы 3.2.4 Магнитные ЗУ МАГНИТНЫЕ ЗУ используются для переноса деталей из ферромагнитных материалов. Захватывание
- 71. Скачать презентацию
Целями дисциплины «Организация работ по техническому обслуживанию, ремонту и испытаниям промышленных
Целями дисциплины «Организация работ по техническому обслуживанию, ремонту и испытаниям промышленных
Рекомендуемая литература
а) основная литература
Воробьев, В. А. Эксплуатация и ремонт электрооборудования
Рекомендуемая литература
а) основная литература
Воробьев, В. А. Эксплуатация и ремонт электрооборудования

Раздел 1.
ВВЕДЕНИЕ
Раздел 1.
ВВЕДЕНИЕ
РОБОТОТЕХНИКА – новая и интенсивно развивающаяся научно-техническая дисциплина, изучающая теорию, расчет
РОБОТОТЕХНИКА – новая и интенсивно развивающаяся научно-техническая дисциплина, изучающая теорию, расчет
обеспечение стабильного качества продукции, не подверженного влиянию субъективных факторов, присущих рабочему-человеку;
высвобождение
обеспечение стабильного качества продукции, не подверженного влиянию субъективных факторов, присущих рабочему-человеку;
высвобождение
Раздел 2.
ОБЩИЕ СВЕДЕНИЯ О ПРОМЫШЛЕННЫХ РОБОТАХ
Раздел 2.
ОБЩИЕ СВЕДЕНИЯ О ПРОМЫШЛЕННЫХ РОБОТАХ
2.1 Исторический аспект развития робототехники
ПЕРВЫЙ ЭТАП
В I в. н. э. Герон
2.1 Исторический аспект развития робототехники
ПЕРВЫЙ ЭТАП
В I в. н. э. Герон
2.1 Исторический аспект развития робототехники
ТРЕТИЙ ЭТАП
В 1920 г. чешский писатель Карел
2.1 Исторический аспект развития робототехники
ТРЕТИЙ ЭТАП
В 1920 г. чешский писатель Карел
2.2 Основные понятия и определения
РОБОТ – это автономно функционирующая универсальная автоматическая
2.2 Основные понятия и определения
РОБОТ – это автономно функционирующая универсальная автоматическая
2.2 Основные понятия и определения
РАБОЧИЙ ОРГАН ПР – составная часть исполнительного
2.2 Основные понятия и определения
РАБОЧИЙ ОРГАН ПР – составная часть исполнительного

2.3 Обобщенная структурная схема робота и функции его систем
Робот, активно
2.3 Обобщенная структурная схема робота и функции его систем
Робот, активно
2.3 Обобщенная структурная схема робота и функции его систем
УПРАВЛЯЮЩАЯ СИСТЕМА –
2.3 Обобщенная структурная схема робота и функции его систем
УПРАВЛЯЮЩАЯ СИСТЕМА –
2.3 Обобщенная структурная схема робота и функции его систем
ИСПОЛНИТЕЛЬНАЯ СИСТЕМА («МОТОРИКА»)
2.3 Обобщенная структурная схема робота и функции его систем
ИСПОЛНИТЕЛЬНАЯ СИСТЕМА («МОТОРИКА»)
2.4 Классификация роботов
2.4.1 По поколениям:
РОБОТЫ ПЕРВОГО ПОКОЛЕНИЯ – это роботы с
2.4 Классификация роботов
2.4.1 По поколениям:
РОБОТЫ ПЕРВОГО ПОКОЛЕНИЯ – это роботы с
2.4 Классификация роботов (2.4.1 По поколениям)
РОБОТЫ ВТОРОГО ПОКОЛЕНИЯ – это очувствленные
2.4 Классификация роботов (2.4.1 По поколениям)
РОБОТЫ ВТОРОГО ПОКОЛЕНИЯ – это очувствленные
2.4 Классификация роботов
2.4.2 По назначению и решаемому классу задач («эволюционная» классификация):
«Эволюционная»
2.4 Классификация роботов
2.4.2 По назначению и решаемому классу задач («эволюционная» классификация):
«Эволюционная»
2.4 Классификация роботов (2.4.2 «Эволюционная» классификация)
ПРОИЗВОДСТВЕННЫЕ РОБОТЫ – это роботы, предназначенные
2.4 Классификация роботов (2.4.2 «Эволюционная» классификация)
ПРОИЗВОДСТВЕННЫЕ РОБОТЫ – это роботы, предназначенные
2.4 Классификация роботов (2.4.2 «Эволюционная» классификация)
По специализации ПР подразделяют на:
Специальные, выполняющие
2.4 Классификация роботов (2.4.2 «Эволюционная» классификация)
По специализации ПР подразделяют на:
Специальные, выполняющие
2.4 Классификация роботов (2.4.2 «Эволюционная» классификация)
РОБОТЫ-ПРОЕКТИРОВЩИКИ применяют для автоматизированного расчета и
2.4 Классификация роботов (2.4.2 «Эволюционная» классификация)
РОБОТЫ-ПРОЕКТИРОВЩИКИ применяют для автоматизированного расчета и

2.4 Классификация роботов
2.4.3 По методу управления:
Классификация роботов по методу управления
БИОТЕХНИЧЕСКИЕ РОБОТЫ
2.4 Классификация роботов
2.4.3 По методу управления:
Классификация роботов по методу управления
БИОТЕХНИЧЕСКИЕ РОБОТЫ
2.4 Классификация роботов (2.4.3 По методу управления)
ЭКЗОСКЕЛЕТОНЫ – это антропоморфные конструкции,
2.4 Классификация роботов (2.4.3 По методу управления)
ЭКЗОСКЕЛЕТОНЫ – это антропоморфные конструкции,
2.4 Классификация роботов (2.4.3 По методу управления)
ИНТЕРАКТИВНЫЕ РОБОТЫ, в отличие от
2.4 Классификация роботов (2.4.3 По методу управления)
ИНТЕРАКТИВНЫЕ РОБОТЫ, в отличие от
2.4 Классификация роботов
2.4.4 По принципу управления
По принципу управления роботы можно разделить
2.4 Классификация роботов
2.4.4 По принципу управления
По принципу управления роботы можно разделить
2.4 Классификация роботов
2.4.5 По величине обслуживаемого объема рабочей зоны:
Классификация роботов по
2.4 Классификация роботов
2.4.5 По величине обслуживаемого объема рабочей зоны:
Классификация роботов по
2.4 Классификация роботов
2.4.6 По ГОСТ 25685-83 «Роботы промышленные. Классификация»:
Классификация роботов по
2.4 Классификация роботов
2.4.6 По ГОСТ 25685-83 «Роботы промышленные. Классификация»:
Классификация роботов по
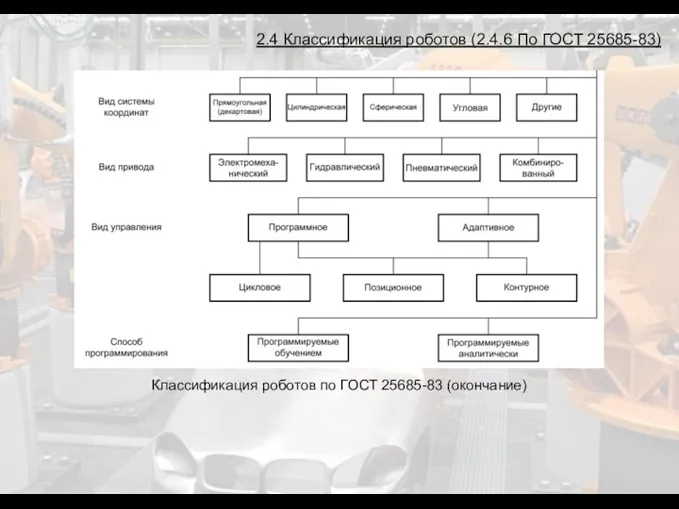
2.4 Классификация роботов (2.4.6 По ГОСТ 25685-83)
Классификация роботов по ГОСТ 25685-83
2.4 Классификация роботов (2.4.6 По ГОСТ 25685-83)
Классификация роботов по ГОСТ 25685-83
2.5 Технические характеристики и показатели ПР
2.5.1 Основные технические характеристики:
НОМИНАЛЬНАЯ ГРУЗОПОДЪЕМНОСТЬ ПР
2.5 Технические характеристики и показатели ПР
2.5.1 Основные технические характеристики:
НОМИНАЛЬНАЯ ГРУЗОПОДЪЕМНОСТЬ ПР
2.5 Технические характеристики и показатели ПР (2.5.1 Основные тех. хар-ки)
РАБОЧАЯ ЗОНА
2.5 Технические характеристики и показатели ПР (2.5.1 Основные тех. хар-ки)
РАБОЧАЯ ЗОНА
2.5 Технические характеристики и показатели ПР (2.5.1 Основные тех. хар-ки)
ОТНОСИТЕЛЬНАЯ ПОГРЕШНОСТЬ
2.5 Технические характеристики и показатели ПР (2.5.1 Основные тех. хар-ки)
ОТНОСИТЕЛЬНАЯ ПОГРЕШНОСТЬ
2.5 Технические характеристики и показатели ПР
2.5.2 Дополнительные технические характеристики:
Количество рук;
Мобильность;
Система
2.5 Технические характеристики и показатели ПР
2.5.2 Дополнительные технические характеристики:
Количество рук;
Мобильность;
Система
2.6 Составные части и конструкция ПР
Общая структурная схема ПР
2.6 Составные части и конструкция ПР
Общая структурная схема ПР
2.6 Составные части и конструкция ПР
Конструкция промышленного робота
1 – опорная конструкция
2.6 Составные части и конструкция ПР
Конструкция промышленного робота 1 – опорная конструкция
Раздел 3.
КОНСТРУКТИВНОЕ УСТРОЙСТВО И МЕХАНИКА ПРОМЫШЛЕННЫХ РОБОТОВ
Раздел 3.
КОНСТРУКТИВНОЕ УСТРОЙСТВО И МЕХАНИКА ПРОМЫШЛЕННЫХ РОБОТОВ
3.1 Манипуляционная система
3.1.1 Общая характеристика
МАНИПУЛЯЦИОННАЯ СИСТЕМА (МС) или МАНИПУЛЯТОР ПР –
3.1 Манипуляционная система
3.1.1 Общая характеристика
МАНИПУЛЯЦИОННАЯ СИСТЕМА (МС) или МАНИПУЛЯТОР ПР –
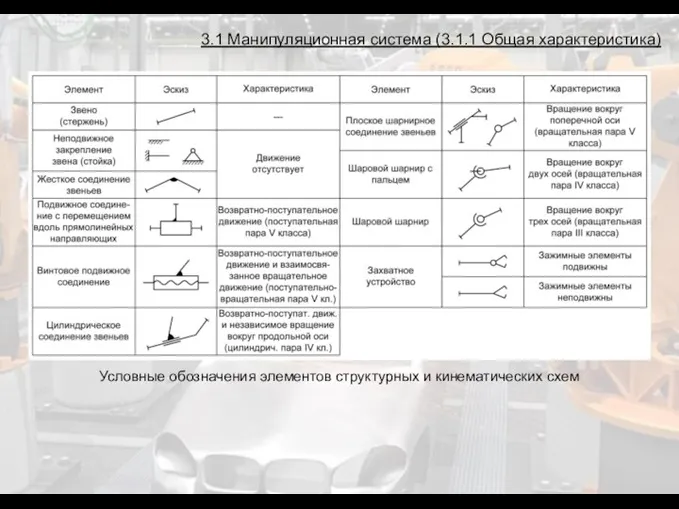
3.1 Манипуляционная система (3.1.1 Общая характеристика)
Условные обозначения элементов структурных и кинематических
3.1 Манипуляционная система (3.1.1 Общая характеристика)
Условные обозначения элементов структурных и кинематических
3.1 Манипуляционная система (3.1.1 Общая характеристика)
Общий вид манипулятора и его структурная
3.1 Манипуляционная система (3.1.1 Общая характеристика)
Общий вид манипулятора и его структурная
3.1 Манипуляционная система
3.1.2 Степени подвижности манипулятора:
ЧИСЛО СТЕПЕНЕЙ СВОБОДЫ (СТЕПЕНЕЙ ПОДВИЖНОСТИ)
3.1 Манипуляционная система
3.1.2 Степени подвижности манипулятора:
ЧИСЛО СТЕПЕНЕЙ СВОБОДЫ (СТЕПЕНЕЙ ПОДВИЖНОСТИ)
3.1 Манипуляционная система (3.1.2 Степени подвижности манипулятора)
где n – число подвижных
3.1 Манипуляционная система (3.1.2 Степени подвижности манипулятора)
где n – число подвижных
3.1 Манипуляционная система (3.1.2 Степени подвижности манипулятора)
Для манипулятора из п. 3.1.1
W
3.1 Манипуляционная система (3.1.2 Степени подвижности манипулятора)
Для манипулятора из п. 3.1.1
W
3.1 Манипуляционная система
3.1.3 Виды кинематических пар звеньев
Виды кинематических пар многозвенных механизмов
3.1 Манипуляционная система
3.1.3 Виды кинематических пар звеньев
Виды кинематических пар многозвенных механизмов
3.1 Манипуляционная система
3.1.4 Базовая система координат
3.1.4.1 Прямоугольная (декартовая) система координат
1
3.1 Манипуляционная система
3.1.4 Базовая система координат
3.1.4.1 Прямоугольная (декартовая) система координат
1
3.1 Манипуляционная система (3.1.4 Базовая система координат)
Недостатки:
чрезмерное увеличение габаритных размеров устройства
3.1 Манипуляционная система (3.1.4 Базовая система координат)
Недостатки:
чрезмерное увеличение габаритных размеров устройства
3.1 Манипуляционная система (3.1.4 Базовая система координат)
Достоинства:
- обеспечение обслуживания большого объема
3.1 Манипуляционная система (3.1.4 Базовая система координат)
Достоинства:
- обеспечение обслуживания большого объема
3.1 Манипуляционная система (3.1.4 Базовая система координат)
1 – вращающаяся
колонна;
2 – поворотная
(качающаяся)
каретка;
3
3.1 Манипуляционная система (3.1.4 Базовая система координат)
1 – вращающаяся
колонна;
2 – поворотная
(качающаяся)
каретка;
3
3.1 Манипуляционная система (3.1.4 Базовая система координат)
1 – вращающаяся
колонна;
2 – «плечо»;
3
3.1 Манипуляционная система (3.1.4 Базовая система координат)
1 – вращающаяся
колонна;
2 – «плечо»;
3
3.1 Манипуляционная система (3.1.4 Базовая система координат)
3.1.4.5 Ангулярная цилиндрическая (сложная цилиндрическая)
3.1 Манипуляционная система (3.1.4 Базовая система координат)
3.1.4.5 Ангулярная цилиндрическая (сложная цилиндрическая)
3.1 Манипуляционная система
3.1.5 Конструктивные схемы основных узлов манипулятора
УЗЕЛ – это
3.1 Манипуляционная система
3.1.5 Конструктивные схемы основных узлов манипулятора
УЗЕЛ – это
3.1 Манипуляционная система
3.1.6 Конструктивные схемы устройств для обеспечения прямолинейного движения
Конструктивные схемы
3.1 Манипуляционная система
3.1.6 Конструктивные схемы устройств для обеспечения прямолинейного движения
Конструктивные схемы
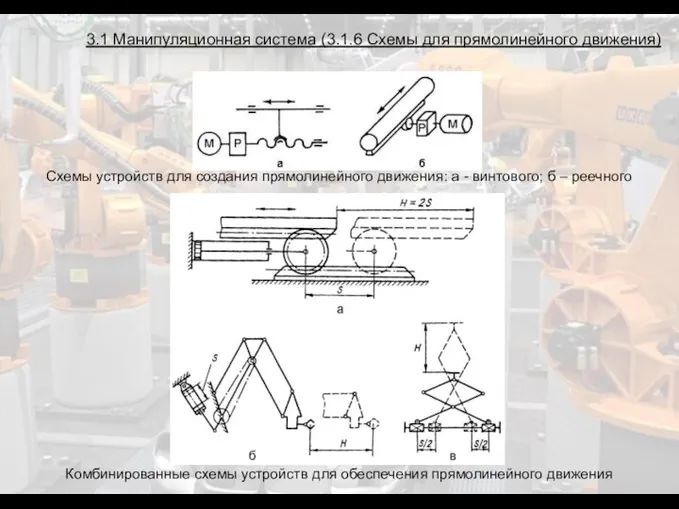
3.1 Манипуляционная система (3.1.6 Схемы для прямолинейного движения)
Схемы устройств для создания
3.1 Манипуляционная система (3.1.6 Схемы для прямолинейного движения)
Схемы устройств для создания
3.1 Манипуляционная система
3.1.7 Конструктивные схемы устройств для обеспечения вращательного движения
Конструктивные схемы
3.1 Манипуляционная система
3.1.7 Конструктивные схемы устройств для обеспечения вращательного движения
Конструктивные схемы
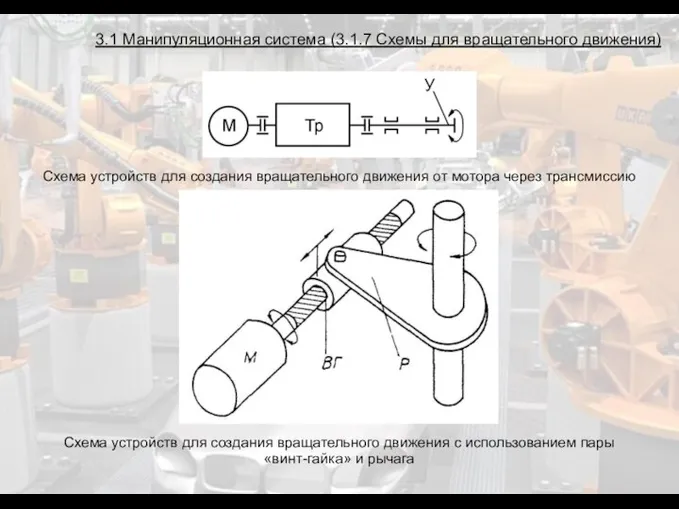
3.1 Манипуляционная система (3.1.7 Схемы для вращательного движения)
Схема устройств для создания
3.1 Манипуляционная система (3.1.7 Схемы для вращательного движения)
Схема устройств для создания
3.1 Манипуляционная система
3.1.8 Общая кинематическая схема манипулятора
3.1 Манипуляционная система
3.1.8 Общая кинематическая схема манипулятора
3.2 Рабочие органы
3.2.1 Классификация захватных устройств
3.2 Рабочие органы
3.2.1 Классификация захватных устройств
3.2 Рабочие органы
3.2.2 Механические ЗУ
Классификация механических ЗУ
Механические неприводные захватные
устройства с
3.2 Рабочие органы
3.2.2 Механические ЗУ
Классификация механических ЗУ
Механические неприводные захватные
устройства с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое неприводное захватное устройство со
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое неприводное захватное устройство со
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Кинематические схемы захватных устройств с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Кинематические схемы захватных устройств с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство с
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство
с вращательным
3.2 Рабочие органы (3.2.2 Механические ЗУ)
Механическое приводное захватное устройство
с вращательным
3.2 Рабочие органы
3.2.3 ЗУ с эластичными камерами
Захватное устройство с эластичной
3.2 Рабочие органы
3.2.3 ЗУ с эластичными камерами
Захватное устройство с эластичной
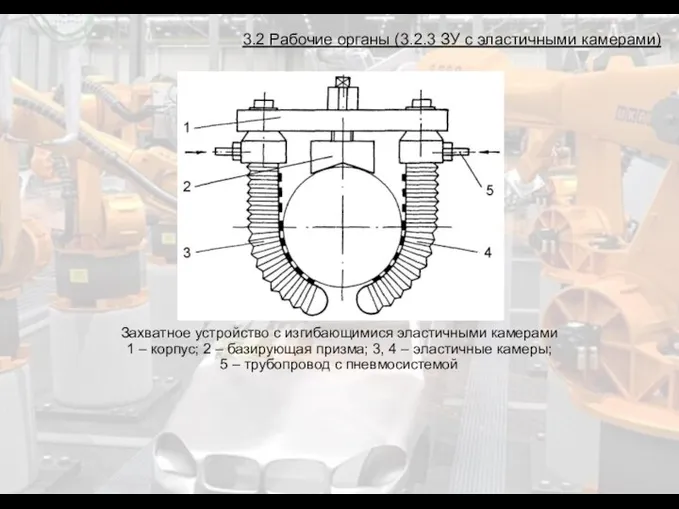
3.2 Рабочие органы (3.2.3 ЗУ с эластичными камерами)
Захватное устройство с
3.2 Рабочие органы (3.2.3 ЗУ с эластичными камерами)
Захватное устройство с
3.2 Рабочие органы
3.2.4 Вакуумные ЗУ
ВАКУУМНЫЕ ЗУ используются преимущественно для переноса
3.2 Рабочие органы
3.2.4 Вакуумные ЗУ
ВАКУУМНЫЕ ЗУ используются преимущественно для переноса
3.2 Рабочие органы (3.2.4 Вакуумные ЗУ)
Безнасосное вакуумное захватное устройство
1 –
3.2 Рабочие органы (3.2.4 Вакуумные ЗУ)
Безнасосное вакуумное захватное устройство
1 –
3.2 Рабочие органы (3.2.4 Вакуумные ЗУ)
Вакуумное захватное устройство: а –
3.2 Рабочие органы (3.2.4 Вакуумные ЗУ)
Вакуумное захватное устройство: а –
3.2 Рабочие органы
3.2.4 Магнитные ЗУ
МАГНИТНЫЕ ЗУ используются для переноса деталей
3.2 Рабочие органы
3.2.4 Магнитные ЗУ
МАГНИТНЫЕ ЗУ используются для переноса деталей
 Биполярные транзисторы
Биполярные транзисторы Групповое занятие по коррекции устной и письменной речи у младших школьников.
Групповое занятие по коррекции устной и письменной речи у младших школьников. Кем я вижу себя через 7 лет. Ващев Евгений
Кем я вижу себя через 7 лет. Ващев Евгений Презентация 11. Бытовой жанр в живописи 70-80-х годов
Презентация 11. Бытовой жанр в живописи 70-80-х годов Договорные отношения в туристической деятельности. Тема 4
Договорные отношения в туристической деятельности. Тема 4 Самоуправление- важнейший компонент воспитательной системы школы
Самоуправление- важнейший компонент воспитательной системы школы Розвиток мовлення 4 клас ІІ семестр
Розвиток мовлення 4 клас ІІ семестр Основные производственные процессы в тепловодном карповом прудовом хозяйстве
Основные производственные процессы в тепловодном карповом прудовом хозяйстве Walk, crawl, stagger
Walk, crawl, stagger Современные информационно-управляющие системы в управлении движением на железнодорожном транспорте
Современные информационно-управляющие системы в управлении движением на железнодорожном транспорте Природоведение. Урок знакомства.
Природоведение. Урок знакомства. Емдік тамақтандыру. Анемия. Қызба. Оттегі терапия
Емдік тамақтандыру. Анемия. Қызба. Оттегі терапия Специфика исследований в бизнесе и менеджменте
Специфика исследований в бизнесе и менеджменте Опухоли, опухолеподобные поражения и кисты слюнных желез. Клиника, диагностика, лечение. (Лекция 7)
Опухоли, опухолеподобные поражения и кисты слюнных желез. Клиника, диагностика, лечение. (Лекция 7) Резные кружева. Русская домовая резьба
Резные кружева. Русская домовая резьба Красный основной соус и его производные
Красный основной соус и его производные Поздравление мамам
Поздравление мамам Pour rire sans reflechir
Pour rire sans reflechir Канальное кодирование. Основы помехоустойчивого кодирования
Канальное кодирование. Основы помехоустойчивого кодирования Склейка Ландыши
Склейка Ландыши Физминутка для глаз Звездочет
Физминутка для глаз Звездочет Использование игровых методов при принятии решений в условиях риска и неопределенности понятие об игровых методах. Тема 8
Использование игровых методов при принятии решений в условиях риска и неопределенности понятие об игровых методах. Тема 8 Вопросы репродуктивного здоровья, современные методы обследования и лечения бесплодия
Вопросы репродуктивного здоровья, современные методы обследования и лечения бесплодия Универсальные семейные ценности
Универсальные семейные ценности Интерактивная игра-викторина по русским народным сказкам для детей старшего дошкольного возраста с ОИН
Интерактивная игра-викторина по русским народным сказкам для детей старшего дошкольного возраста с ОИН Оборудование и технология для гибридной лазерно-дуговой сварки сталей и алюминиевых сплавов
Оборудование и технология для гибридной лазерно-дуговой сварки сталей и алюминиевых сплавов Готовимся к ЕГЭ по биологии. Презентация – практикум по подготовке к успешному выполнению задания С5
Готовимся к ЕГЭ по биологии. Презентация – практикум по подготовке к успешному выполнению задания С5 Псков. Мастеровой. Гости праздника
Псков. Мастеровой. Гости праздника