- Основные законы регулирования. Автоматизированное управление ХТС. Лекция 5

Содержание
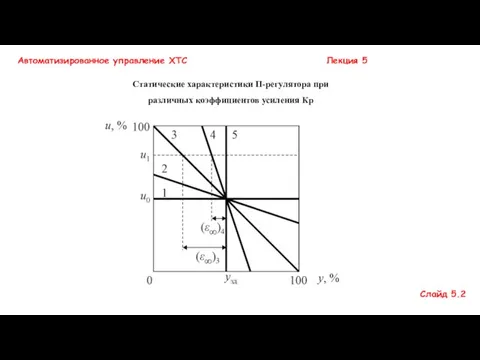
- 2. Автоматизированное управление ХТС Лекция 5 Статические характеристики П-регулятора при различных коэффициентов усиления Кр Слайд 5.2
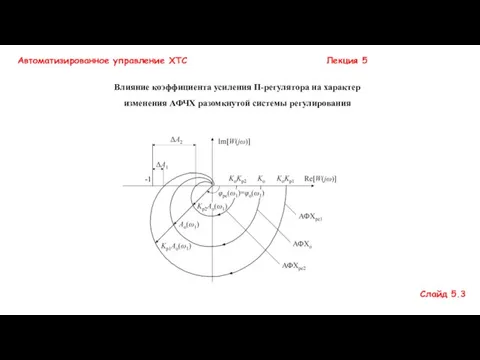
- 3. Автоматизированное управление ХТС Лекция 5 Влияние коэффициента усиления П-регулятора на характер изменения АФЧХ разомкнутой системы регулирования
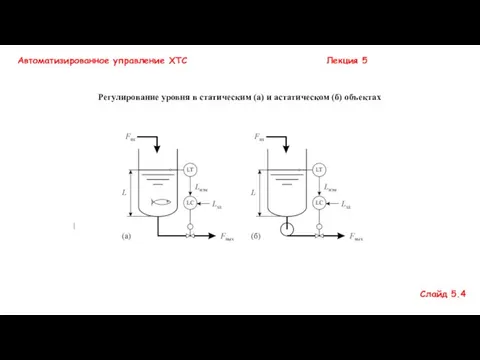
- 4. Автоматизированное управление ХТС Лекция 5 Регулирование уровня в статическим (а) и астатическом (б) объектах Слайд 5.4
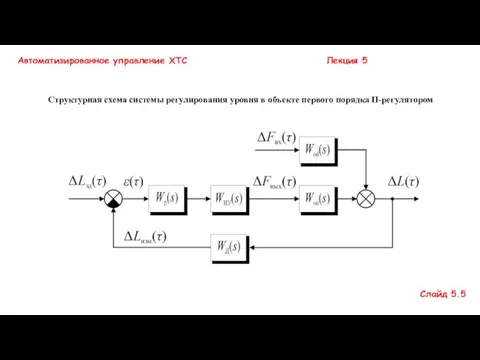
- 5. Автоматизированное управление ХТС Лекция 5 Структурная схема системы регулирования уровня в объекте первого порядка П-регулятором Слайд
- 6. Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу по времени от ошибки регулирования: Автоматизированное управление ХТС Лекция
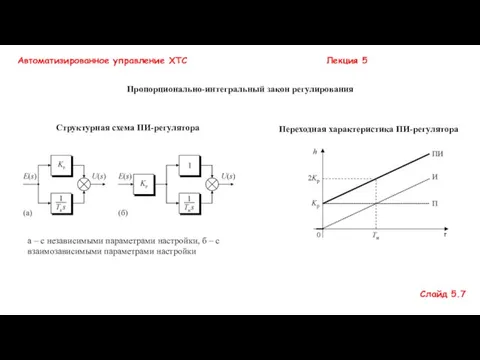
- 7. Автоматизированное управление ХТС Лекция 5 Пропорционально-интегральный закон регулирования Структурная схема ПИ-регулятора а – с независимыми параметрами
- 8. Пропорционально-дифференциальный закон регулирования Автоматизированное управление ХТС Лекция 5 Слайд 5.8 Структурная схема ПД-регулятора Переходная характеристика ПД-регулятора
- 9. Пропорционально-интегрально-дифференциальный закон регулирования Структурная схема ПИД-регулятора Переходная характеристика ПИД-регулятора Автоматизированное управление ХТС Лекция 5 Слайд 5.9
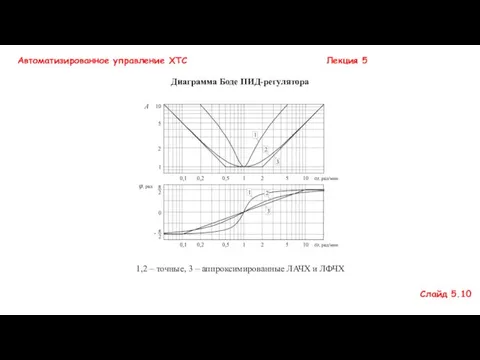
- 10. Автоматизированное управление ХТС Лекция 5 Слайд 5.10 Диаграмма Боде ПИД-регулятора 1,2 – точные, 3 – аппроксимированные
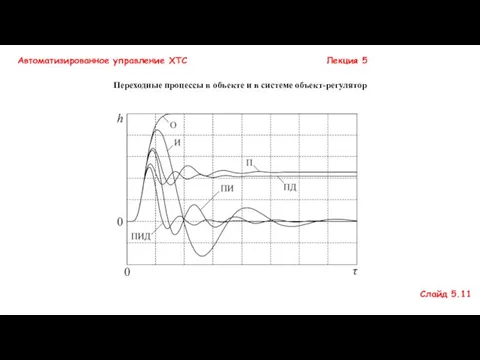
- 11. Автоматизированное управление ХТС Лекция 5 Переходные процессы в объекте и в системе объект-регулятор Слайд 5.11
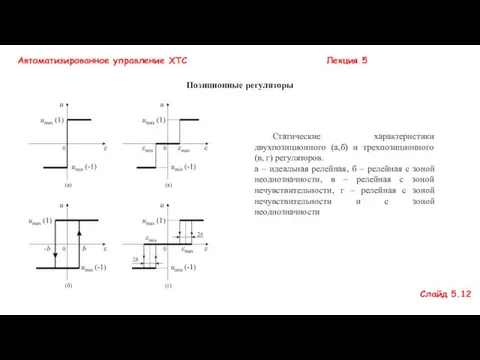
- 12. Автоматизированное управление ХТС Лекция 5 Позиционные регуляторы Статические характеристики двухпозиционного (а,б) и трехпозиционного (в, г) регуляторов.
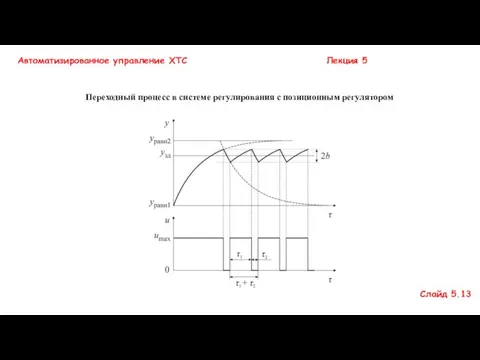
- 13. Автоматизированное управление ХТС Лекция 5 Слайд 5.13 Переходный процесс в системе регулирования с позиционным регулятором
- 14. Регуляторы с прогнозирующей моделью придают следующие свойства системам управления, включая и многосвязные: работоспособность системы управления обеспечивается
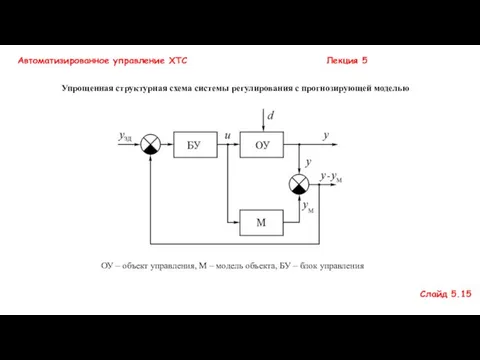
- 15. Автоматизированное управление ХТС Лекция 5 Слайд 5.15 Упрощенная структурная схема системы регулирования с прогнозирующей моделью ОУ
- 17. Скачать презентацию
Автоматизированное управление ХТС Лекция 5
Статические характеристики П-регулятора при различных коэффициентов усиления
Автоматизированное управление ХТС Лекция 5
Статические характеристики П-регулятора при различных коэффициентов усиления
Автоматизированное управление ХТС Лекция 5
Влияние коэффициента усиления П-регулятора на характер изменения
Автоматизированное управление ХТС Лекция 5
Влияние коэффициента усиления П-регулятора на характер изменения
Автоматизированное управление ХТС Лекция 5
Регулирование уровня в статическим (а) и астатическом
Автоматизированное управление ХТС Лекция 5
Регулирование уровня в статическим (а) и астатическом
Автоматизированное управление ХТС Лекция 5
Структурная схема системы регулирования уровня в объекте
Автоматизированное управление ХТС Лекция 5
Структурная схема системы регулирования уровня в объекте
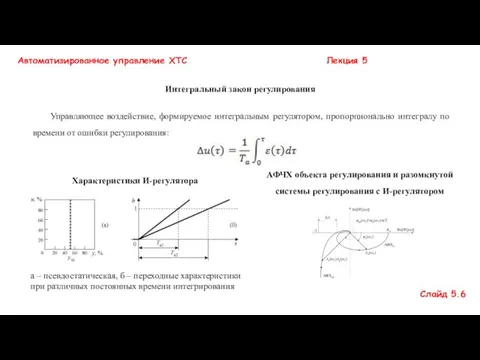
Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу по времени от ошибки
Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу по времени от ошибки
Автоматизированное управление ХТС Лекция 5
Пропорционально-интегральный закон регулирования
Структурная схема ПИ-регулятора
а – с
Автоматизированное управление ХТС Лекция 5
Пропорционально-интегральный закон регулирования
Структурная схема ПИ-регулятора
а – с
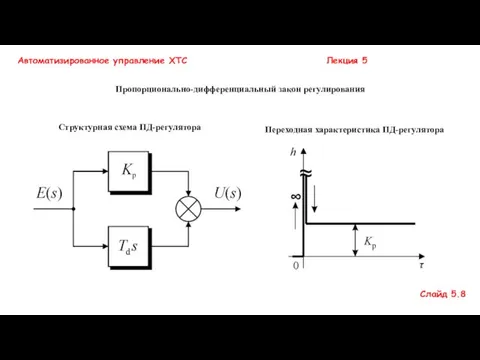
Пропорционально-дифференциальный закон регулирования
Автоматизированное управление ХТС Лекция 5
Слайд 5.8
Структурная схема ПД-регулятора
Переходная характеристика
Пропорционально-дифференциальный закон регулирования
Автоматизированное управление ХТС Лекция 5
Слайд 5.8
Структурная схема ПД-регулятора
Переходная характеристика
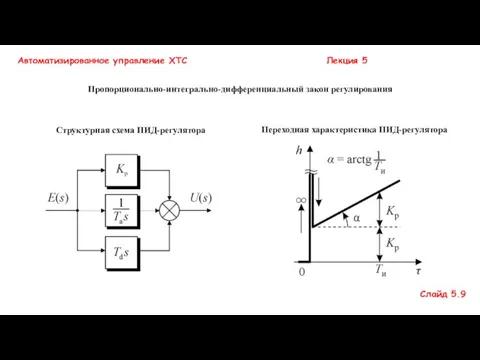
Пропорционально-интегрально-дифференциальный закон регулирования
Структурная схема ПИД-регулятора
Переходная характеристика ПИД-регулятора
Автоматизированное управление ХТС Лекция 5
Слайд
Пропорционально-интегрально-дифференциальный закон регулирования
Структурная схема ПИД-регулятора
Переходная характеристика ПИД-регулятора
Автоматизированное управление ХТС Лекция 5
Слайд
Автоматизированное управление ХТС Лекция 5
Слайд 5.10
Диаграмма Боде ПИД-регулятора
1,2 – точные, 3
Автоматизированное управление ХТС Лекция 5
Слайд 5.10
Диаграмма Боде ПИД-регулятора
1,2 – точные, 3
Автоматизированное управление ХТС Лекция 5
Переходные процессы в объекте и в системе
Автоматизированное управление ХТС Лекция 5
Переходные процессы в объекте и в системе
Автоматизированное управление ХТС Лекция 5
Позиционные регуляторы
Статические характеристики двухпозиционного (а,б) и трехпозиционного
Автоматизированное управление ХТС Лекция 5
Позиционные регуляторы
Статические характеристики двухпозиционного (а,б) и трехпозиционного
Автоматизированное управление ХТС Лекция 5
Слайд 5.13
Переходный процесс в системе регулирования с
Автоматизированное управление ХТС Лекция 5
Слайд 5.13
Переходный процесс в системе регулирования с
Регуляторы с прогнозирующей моделью придают следующие свойства системам управления, включая и
Регуляторы с прогнозирующей моделью придают следующие свойства системам управления, включая и
Автоматизированное управление ХТС Лекция 5
Слайд 5.15
Упрощенная структурная схема системы регулирования с
Автоматизированное управление ХТС Лекция 5
Слайд 5.15
Упрощенная структурная схема системы регулирования с
 Инклюзивное образование лиц с особенностями психофизического развития
Инклюзивное образование лиц с особенностями психофизического развития Культурное наследие TES III: Morrowind
Культурное наследие TES III: Morrowind kultura_20-21
kultura_20-21 Федор III Алексеевич
Федор III Алексеевич Такие разные Татьяны…
Такие разные Татьяны… Значение петровских преобразований в истории страны
Значение петровских преобразований в истории страны Разъяснительная беседа по профилактике мошенничеств на территории обслуживания Отделением МВД России по г. Муравленко
Разъяснительная беседа по профилактике мошенничеств на территории обслуживания Отделением МВД России по г. Муравленко Исследование задач интерференции скважин в условиях упругого режима
Исследование задач интерференции скважин в условиях упругого режима Подготовка к Единому государственному экзамену по русскому языку. Грамматические нормы русского языка
Подготовка к Единому государственному экзамену по русскому языку. Грамматические нормы русского языка Печатные формы высокой печати
Печатные формы высокой печати The National Trust for the Welfare of Persons with Autism, Cerebral Palsy
The National Trust for the Welfare of Persons with Autism, Cerebral Palsy Сакура. Япония
Сакура. Япония Микроконтроллерное устройство защиты электрооборудования
Микроконтроллерное устройство защиты электрооборудования Презентация проекта Я, ты, он, она, вместе - дружная семья
Презентация проекта Я, ты, он, она, вместе - дружная семья Адаптация детей к условиям ДОУ
Адаптация детей к условиям ДОУ Альонка, вітаю тебе з днем народження
Альонка, вітаю тебе з днем народження Великие географические открытия
Великие географические открытия Статистические таблицы
Статистические таблицы Проект информационно – практико - ориентированный (Средне - срочный). Я - твой друг и ты - мой друг
Проект информационно – практико - ориентированный (Средне - срочный). Я - твой друг и ты - мой друг (1)
(1) Педагогическая психология
Педагогическая психология The Lithuanian pages of the creative biography of Stanislav Monyushko
The Lithuanian pages of the creative biography of Stanislav Monyushko Социально- коммуникативное развитие
Социально- коммуникативное развитие Культурная жизнь в блокадном Ленинграде
Культурная жизнь в блокадном Ленинграде GreenWay LTD. The production base of the group of companies is located in Ukraine
GreenWay LTD. The production base of the group of companies is located in Ukraine Магнитное поле, его характеритики, виды
Магнитное поле, его характеритики, виды Шаблон для презентации Россия - Родина моя
Шаблон для презентации Россия - Родина моя Личностное развитие слабослышащих детей
Личностное развитие слабослышащих детей