- Основы робототехники

Содержание
- 2. 1. Основные термины и определения Робот – универсальное средство автоматизации, которое можно быстро (гибко) перепрограммировать на
- 3. Манипулятор – кинематическая цепь из “n” элементов (звеньев) шарнирно связанных между собой попарно в суставах (сочленениях)
- 4. Рабочий объем манипулятора – область пространства, в котором возможно захватывание и перемещение объектов манипулирования. Сенсорика робота
- 5. Система управления робота – это САУ, как правило иерархическая, цифровая, многомерная (по числу звеньев манипулятора n),
- 6. 2. Принципы построения манипуляционных роботов Обратимся к классификации манипуляционных роботов
- 7. Системы управления роботов отличаются: Исключительной сложностью по числу и характеру элементов (механических, электронных, биологических); Многорежимностью работы
- 8. В иерархии этой системы выделяют: Исполнительный уровень (манипулятор, электродвигатели в суставах, редукторы, датчики и т.д.) предназначен
- 9. Различают движения робота: Глобальные (внутрицеховые) для транспортировки заготовок и инструментов между РТК, автоматизированным складом и т.д.;
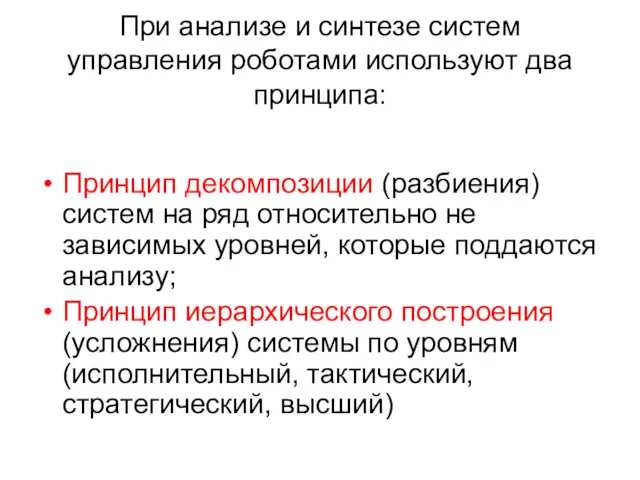
- 10. При анализе и синтезе систем управления роботами используют два принципа: Принцип декомпозиции (разбиения) систем на ряд
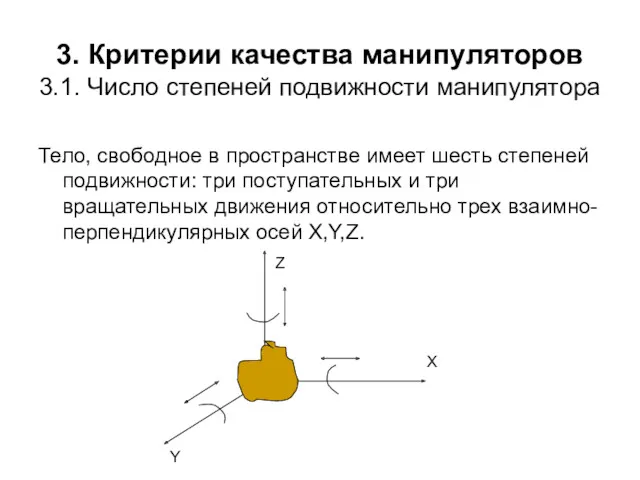
- 11. 3. Критерии качества манипуляторов 3.1. Число степеней подвижности манипулятора Тело, свободное в пространстве имеет шесть степеней
- 12. Манипулятор состоит из “n” звеньев (тел) шарнирно соединенных в цепь, так что соседние звенья образуют в
- 13. Различают кинематические пары: вращательного движения B[п] поступательного движения “П”
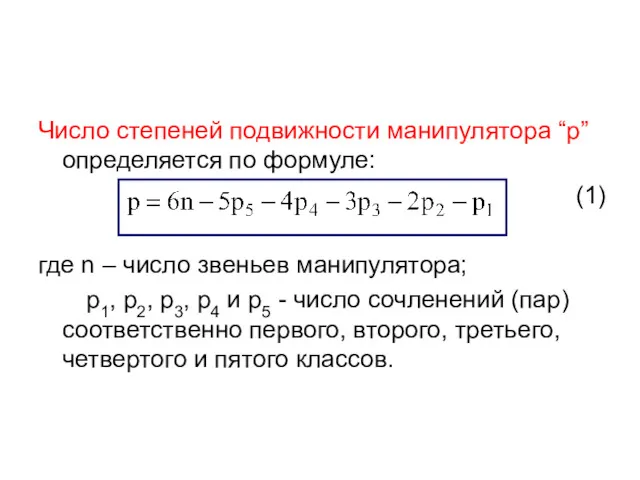
- 14. Число степеней подвижности манипулятора “p” определяется по формуле: (1) где n – число звеньев манипулятора; p1,
- 15. ПРИМЕР Пусть манипулятор имеет антропоморфную (человекоподобную) кинематику: И так, манипулятор имеет три подвижных звена: I, II
- 16. Обычно в универсальных манипуляторах р=6 и этого достаточно для произвольной ориентации несимметричных тел в рабочем объеме.
- 17. Рука человека содержит 18 подвижных звеньев, т.к. к трем звеньям обозначенным на рисунке добавляется еще 15
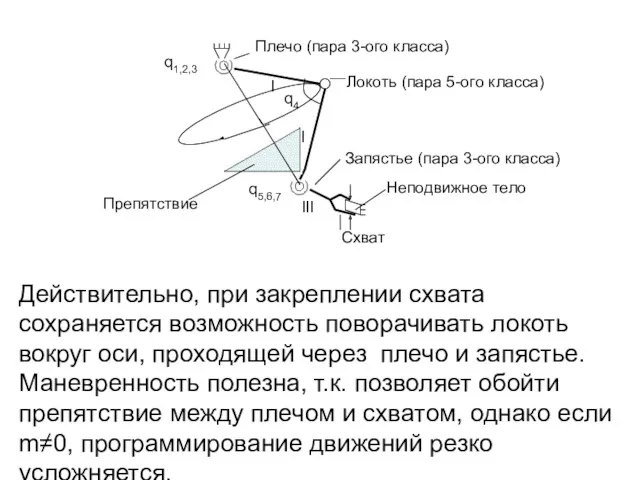
- 18. 3.2 Маневренность манипулятора Маневренностью “m” называется число степеней подвижности манипулятора при закрепленном схвате: (2) В соответствии
- 19. Действительно, при закреплении схвата сохраняется возможность поворачивать локоть вокруг оси, проходящей через плечо и запястье. Маневренность
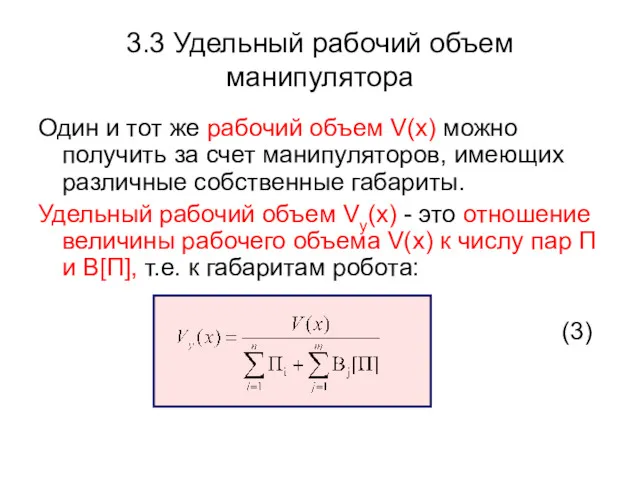
- 20. 3.3 Удельный рабочий объем манипулятора Один и тот же рабочий объем V(x) можно получить за счет
- 21. Минимальное значение Vу(х) - в роботах с прямоугольной системой координат, максимальное - со сферической системой, промежуточное
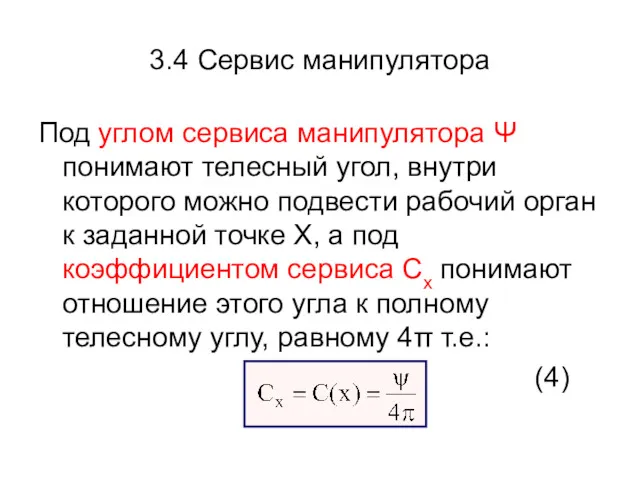
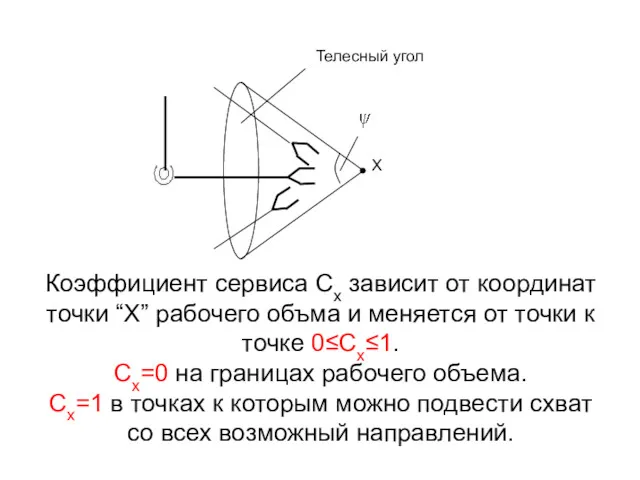
- 22. 3.4 Сервис манипулятора Под углом сервиса манипулятора Ψ понимают телесный угол, внутри которого можно подвести рабочий
- 23. Коэффициент сервиса Сх зависит от координат точки “X” рабочего объма и меняется от точки к точке
- 24. Для плоского манипулятора, звенья которого находятся в одной плоскости под сервисом понимают не телесный, а плоский
- 25. Очевидно, что та кинематическая схема качественнее, которая обеспечивает наибольший средний коэффициент сервиса КС по рабочему объему
- 26. Так, в манипуляторе с антропоморфной кинематикой оказалось, что при Кс→max, при L1=L2 и L3→0, где L1,
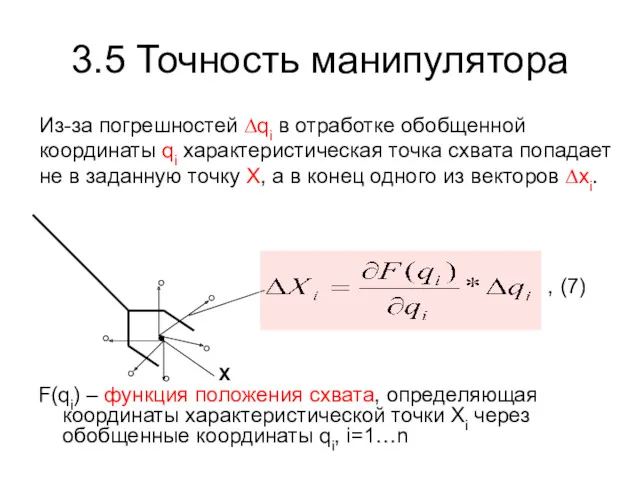
- 27. 3.5 Точность манипулятора Из-за погрешностей ∆qi в отработке обобщенной координаты qi характеристическая точка схвата попадает не
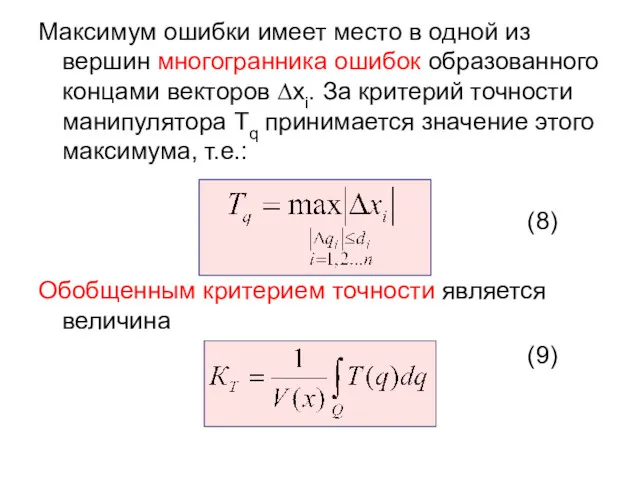
- 28. Максимум ошибки имеет место в одной из вершин многогранника ошибок образованного концами векторов ∆хi. За критерий
- 29. Максимальную точность имеют роботы с прямоугольной системой координат (сборочные роботы, роботы для огранки алмазов и т.д.).
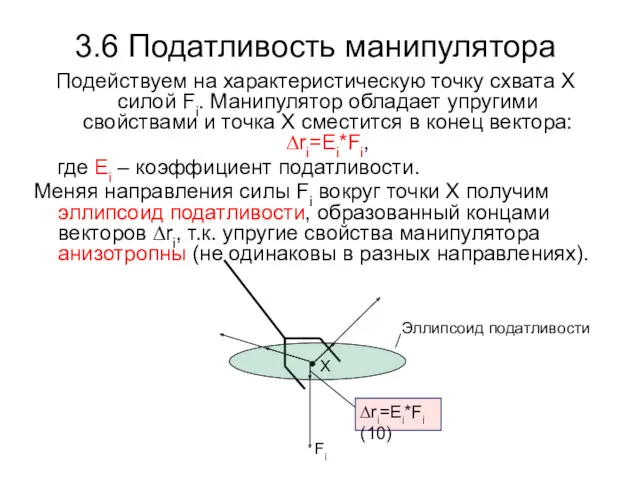
- 30. 3.6 Податливость манипулятора Подействуем на характеристическую точку схвата Х силой Fi. Манипулятор обладает упругими свойствами и
- 31. Податливость П(q) представляет собой объем эллипсоида податливости: (11) Критерий качества манипулятора по податливости Кп – это
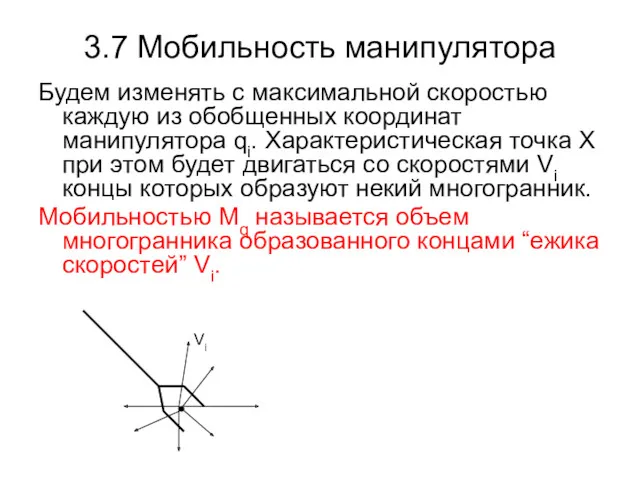
- 32. 3.7 Мобильность манипулятора Будем изменять с максимальной скоростью каждую из обобщенных координат манипулятора qi. Характеристическая точка
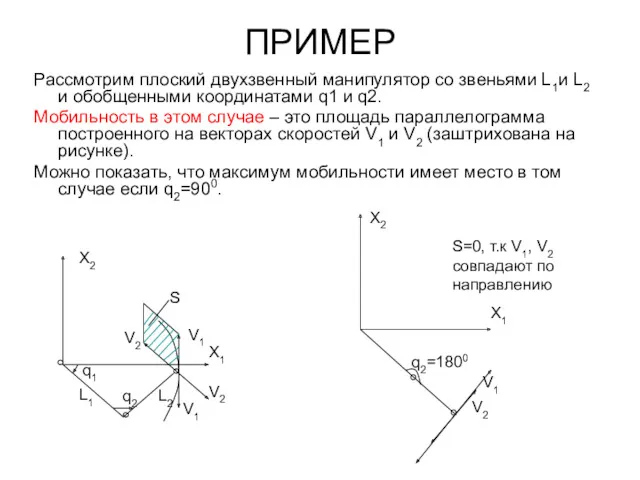
- 33. ПРИМЕР Рассмотрим плоский двухзвенный манипулятор со звеньями L1и L2 и обобщенными координатами q1 и q2. Мобильность
- 34. Мобильность манипулятора характеризует одновременно как скоростные возможности робота, так и многообразие направлений перемещения характеристической точки (поза
- 35. Усредняя мобильность по всему рабочему объему можно получить глобальную мобильность или критерий качества манипулятора по мобильности:
- 36. Понятие мобильности весьма полезно использовать при проектировании РТК (располагая манипулятор таким образом, чтобы его мобильность оказалась
- 37. 4. Критерии качества систем управления роботов Эта группа критериев характеризует качество работы системы управления робота.
- 38. 4.1 Объем движений манипулятора Предположим схват манипулятора необходимо переместить из начального положения x0=F(q0) в конечное положение
- 39. Из всех возможных траекторий движений схвата можно выбрать такую, при которой: Д1→min (15) Такая траектория очевидно
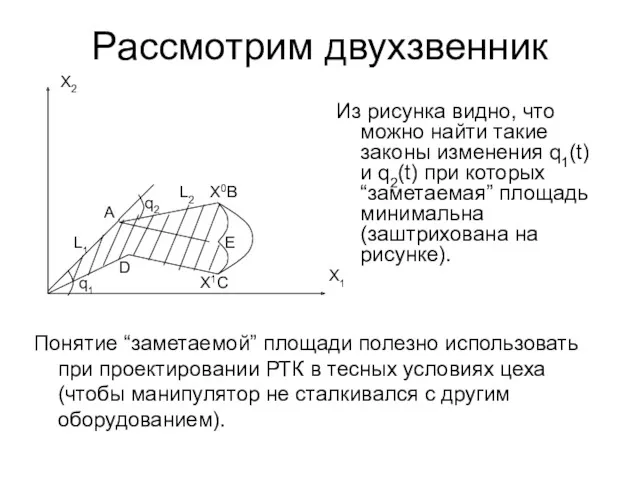
- 40. 4.2 “Заметаемая” площадь При движении манипулятора его звенья вычерчивают (заметывают) в пространстве некоторые поверхности. Можно потребовать
- 41. Рассмотрим двухзвенник Понятие “заметаемой” площади полезно использовать при проектировании РТК в тесных условиях цеха (чтобы манипулятор
- 43. Скачать презентацию
1. Основные термины и определения
Робот – универсальное средство автоматизации, которое можно
1. Основные термины и определения
Робот – универсальное средство автоматизации, которое можно
Манипулятор – кинематическая цепь из “n” элементов (звеньев) шарнирно связанных между
Манипулятор – кинематическая цепь из “n” элементов (звеньев) шарнирно связанных между
Рабочий объем манипулятора – область пространства, в котором возможно захватывание и
Рабочий объем манипулятора – область пространства, в котором возможно захватывание и
Система управления робота – это САУ, как правило иерархическая, цифровая, многомерная
Система управления робота – это САУ, как правило иерархическая, цифровая, многомерная
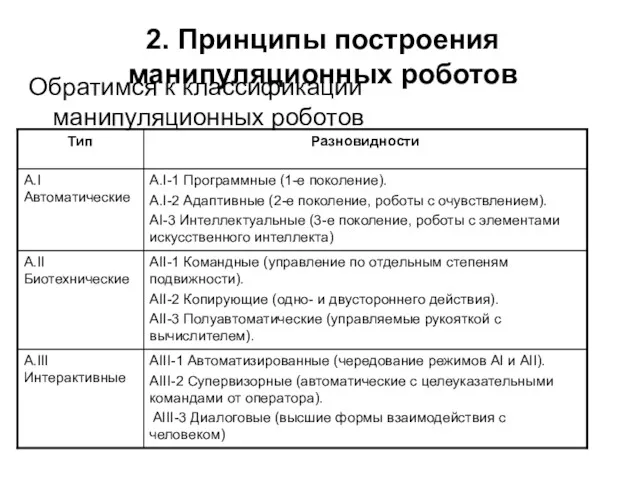
2. Принципы построения манипуляционных роботов
Обратимся к классификации манипуляционных роботов
2. Принципы построения манипуляционных роботов
Обратимся к классификации манипуляционных роботов
Системы управления роботов отличаются:
Исключительной сложностью по числу и характеру элементов (механических,
Системы управления роботов отличаются:
Исключительной сложностью по числу и характеру элементов (механических,
В иерархии этой системы выделяют:
Исполнительный уровень (манипулятор, электродвигатели в суставах, редукторы,
В иерархии этой системы выделяют:
Исполнительный уровень (манипулятор, электродвигатели в суставах, редукторы,
Различают движения робота:
Глобальные (внутрицеховые) для транспортировки заготовок и инструментов между РТК,
Различают движения робота:
Глобальные (внутрицеховые) для транспортировки заготовок и инструментов между РТК,
При анализе и синтезе систем управления роботами используют два принципа:
Принцип декомпозиции
При анализе и синтезе систем управления роботами используют два принципа:
Принцип декомпозиции
3. Критерии качества манипуляторов
3.1. Число степеней подвижности манипулятора
Тело, свободное в
3. Критерии качества манипуляторов
3.1. Число степеней подвижности манипулятора
Тело, свободное в
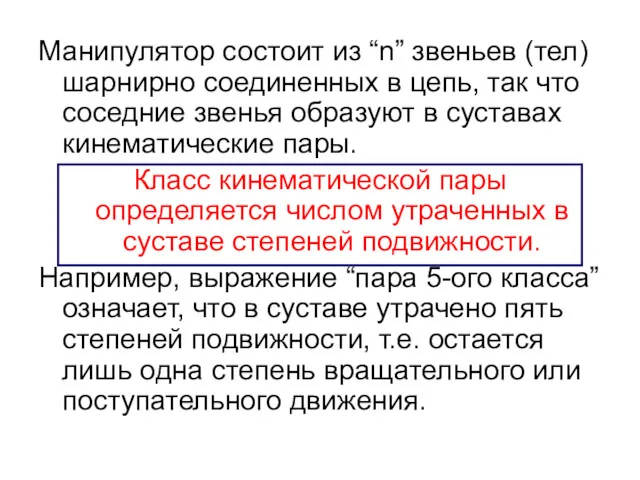
Манипулятор состоит из “n” звеньев (тел) шарнирно соединенных в цепь, так
Манипулятор состоит из “n” звеньев (тел) шарнирно соединенных в цепь, так
![Различают кинематические пары: вращательного движения B[п] поступательного движения “П”](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/120959/slide-12.jpg)
Различают кинематические пары:
вращательного движения B[п]
поступательного движения “П”
Различают кинематические пары:
вращательного движения B[п]
поступательного движения “П”
Число степеней подвижности манипулятора “p” определяется по формуле:
(1)
где n –
Число степеней подвижности манипулятора “p” определяется по формуле:
(1)
где n –
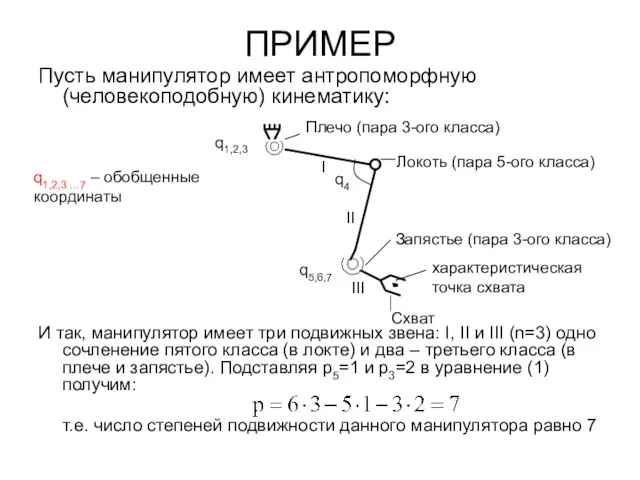
ПРИМЕР
Пусть манипулятор имеет антропоморфную (человекоподобную) кинематику:
И так, манипулятор имеет три
ПРИМЕР
Пусть манипулятор имеет антропоморфную (человекоподобную) кинематику:
И так, манипулятор имеет три
Обычно в универсальных манипуляторах р=6 и этого достаточно для произвольной ориентации
Обычно в универсальных манипуляторах р=6 и этого достаточно для произвольной ориентации
Рука человека содержит 18 подвижных звеньев, т.к. к трем звеньям обозначенным
Рука человека содержит 18 подвижных звеньев, т.к. к трем звеньям обозначенным
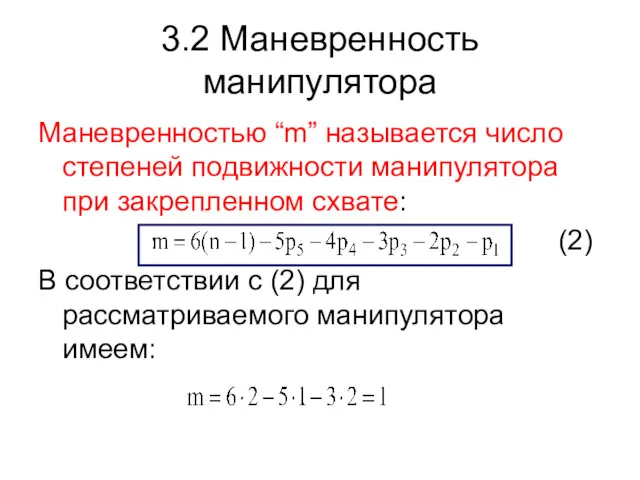
3.2 Маневренность манипулятора
Маневренностью “m” называется число степеней подвижности манипулятора при закрепленном
3.2 Маневренность манипулятора
Маневренностью “m” называется число степеней подвижности манипулятора при закрепленном
Действительно, при закреплении схвата сохраняется возможность поворачивать локоть вокруг оси, проходящей
Действительно, при закреплении схвата сохраняется возможность поворачивать локоть вокруг оси, проходящей
3.3 Удельный рабочий объем манипулятора
Один и тот же рабочий объем V(x)
3.3 Удельный рабочий объем манипулятора
Один и тот же рабочий объем V(x)
Минимальное значение Vу(х) - в роботах с прямоугольной системой координат,
Минимальное значение Vу(х) - в роботах с прямоугольной системой координат,
3.4 Сервис манипулятора
Под углом сервиса манипулятора Ψ понимают телесный угол, внутри
3.4 Сервис манипулятора
Под углом сервиса манипулятора Ψ понимают телесный угол, внутри
Коэффициент сервиса Сх зависит от координат точки “X” рабочего объма и
Коэффициент сервиса Сх зависит от координат точки “X” рабочего объма и
Для плоского манипулятора, звенья которого находятся в одной плоскости под сервисом
Для плоского манипулятора, звенья которого находятся в одной плоскости под сервисом
Очевидно, что та кинематическая схема качественнее, которая обеспечивает наибольший средний коэффициент
Очевидно, что та кинематическая схема качественнее, которая обеспечивает наибольший средний коэффициент
Так, в манипуляторе с антропоморфной кинематикой оказалось, что при Кс→max, при
Так, в манипуляторе с антропоморфной кинематикой оказалось, что при Кс→max, при
3.5 Точность манипулятора
Из-за погрешностей ∆qi в отработке обобщенной
координаты qi характеристическая
3.5 Точность манипулятора
Из-за погрешностей ∆qi в отработке обобщенной
координаты qi характеристическая
Максимум ошибки имеет место в одной из вершин многогранника ошибок образованного
Максимум ошибки имеет место в одной из вершин многогранника ошибок образованного
Максимальную точность имеют роботы с прямоугольной системой координат (сборочные роботы, роботы
Максимальную точность имеют роботы с прямоугольной системой координат (сборочные роботы, роботы
3.6 Податливость манипулятора
Подействуем на характеристическую точку схвата Х силой Fi. Манипулятор
3.6 Податливость манипулятора
Подействуем на характеристическую точку схвата Х силой Fi. Манипулятор
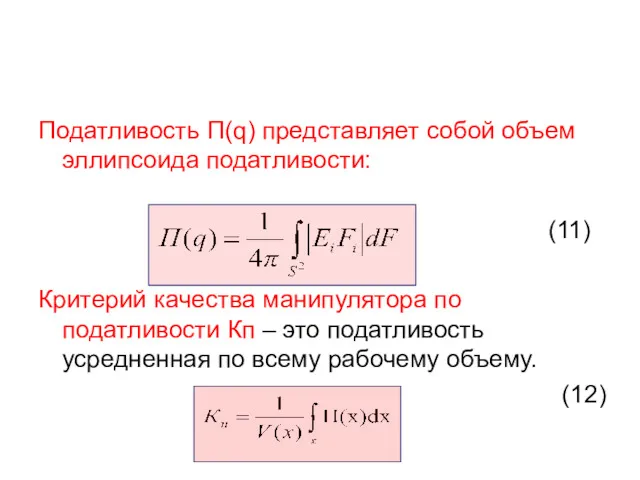
Податливость П(q) представляет собой объем эллипсоида податливости:
(11)
Критерий качества манипулятора по
Податливость П(q) представляет собой объем эллипсоида податливости:
(11)
Критерий качества манипулятора по
3.7 Мобильность манипулятора
Будем изменять с максимальной скоростью каждую из обобщенных координат
3.7 Мобильность манипулятора
Будем изменять с максимальной скоростью каждую из обобщенных координат
ПРИМЕР
Рассмотрим плоский двухзвенный манипулятор со звеньями L1и L2 и обобщенными координатами
ПРИМЕР
Рассмотрим плоский двухзвенный манипулятор со звеньями L1и L2 и обобщенными координатами
Мобильность манипулятора характеризует одновременно как скоростные возможности робота, так и многообразие
Мобильность манипулятора характеризует одновременно как скоростные возможности робота, так и многообразие
Усредняя мобильность по всему рабочему объему можно получить глобальную мобильность или
Усредняя мобильность по всему рабочему объему можно получить глобальную мобильность или
Понятие мобильности весьма полезно использовать при проектировании РТК (располагая манипулятор таким
Понятие мобильности весьма полезно использовать при проектировании РТК (располагая манипулятор таким
4. Критерии качества систем управления роботов
Эта группа критериев характеризует качество работы
4. Критерии качества систем управления роботов
Эта группа критериев характеризует качество работы
4.1 Объем движений манипулятора
Предположим схват манипулятора необходимо переместить из начального положения
4.1 Объем движений манипулятора
Предположим схват манипулятора необходимо переместить из начального положения
Из всех возможных траекторий движений схвата можно выбрать такую, при которой:
Из всех возможных траекторий движений схвата можно выбрать такую, при которой:
4.2 “Заметаемая” площадь
При движении манипулятора его звенья вычерчивают (заметывают) в пространстве
4.2 “Заметаемая” площадь
При движении манипулятора его звенья вычерчивают (заметывают) в пространстве
Рассмотрим двухзвенник
Понятие “заметаемой” площади полезно использовать при проектировании РТК в тесных
Рассмотрим двухзвенник
Понятие “заметаемой” площади полезно использовать при проектировании РТК в тесных
 Старинные и современные автомобили
Старинные и современные автомобили Времена глагола
Времена глагола Юридическая ответственность за экологические правонарушения
Юридическая ответственность за экологические правонарушения Турнир знатоков для 8 – 9 классов
Турнир знатоков для 8 – 9 классов Курорт на черном море город Анапа
Курорт на черном море город Анапа Общественное движение при Александре I
Общественное движение при Александре I Презентация опыта сотрудничества музыкального руководителя с социальными партнёрами
Презентация опыта сотрудничества музыкального руководителя с социальными партнёрами Презентация к уроку ОРКСЭ модуль Основы исламской культуры 4 класс
Презентация к уроку ОРКСЭ модуль Основы исламской культуры 4 класс Физминутки
Физминутки Государство и право Франции в период Нового времени
Государство и право Франции в период Нового времени Презентация по географииПриродные зоны мира.
Презентация по географииПриродные зоны мира. Организация и методы проведения занятий в подразделении по технической подготовке
Организация и методы проведения занятий в подразделении по технической подготовке Маркетинговое исследование лекарственных средств синтетического и растительного происхождения, обладающих ветрогонным действием
Маркетинговое исследование лекарственных средств синтетического и растительного происхождения, обладающих ветрогонным действием Презентация проекта на тему Жевательная резинка- друг или враг нашему здоровью
Презентация проекта на тему Жевательная резинка- друг или враг нашему здоровью Зарядка для глаз
Зарядка для глаз презентация
презентация Традиционные и инновационные формы массовой работы в школьной библиотеке
Традиционные и инновационные формы массовой работы в школьной библиотеке План написания исследовательских работ
План написания исследовательских работ Индустрия размещения
Индустрия размещения Технико-экономическая эффективность автоматизации технологических процессов
Технико-экономическая эффективность автоматизации технологических процессов НЕОТЛОЖНЫЕ СОСТОЯНИЯ В ПСИХИАТРИИ И НАРКОЛОГИИ И ОСОБЕННОСТИ ОКАЗАНИЯ НЕОТЛОЖНОЙ ПОМОЩИ БОЛЬНЫМ С ПСИХИЧЕСКИМИ И НАРКОТИЧЕСКИМИ РАССТРОЙСТВАМИ
НЕОТЛОЖНЫЕ СОСТОЯНИЯ В ПСИХИАТРИИ И НАРКОЛОГИИ И ОСОБЕННОСТИ ОКАЗАНИЯ НЕОТЛОЖНОЙ ПОМОЩИ БОЛЬНЫМ С ПСИХИЧЕСКИМИ И НАРКОТИЧЕСКИМИ РАССТРОЙСТВАМИ Презентация Организация предметно-развивающей среды в ДОУ
Презентация Организация предметно-развивающей среды в ДОУ конспект занятия Определение азимута
конспект занятия Определение азимута Презентация Путешествие по родному краю
Презентация Путешествие по родному краю Нарезание резьбы
Нарезание резьбы Тип Кишечнополостные
Тип Кишечнополостные Исполнение цифровых защит. Помехозащищенность каналов передачи информации
Исполнение цифровых защит. Помехозащищенность каналов передачи информации Нашествие с Востока
Нашествие с Востока