- Основы спутниковой навигации

Содержание
- 2. Лекция №1 Основы спутниковой навигации Изучаемые вопросы: 1. Введение в дисциплину. 2. Краткая история становления и
- 3. Рекомендуемая литература: 1. Малышев В.В., Куршин В.В., Ревнивых С. Г. Введение в спутниковую навигацию. – Изд.
- 4. В рамках дисциплины «Программная инженерия» по согласованию руководителей вашего университета и «Российской корпорации ракетно-космического приборостроения и
- 5. Основными направлениями деятельности корпорации «Российские космические системы» являются создание, развитие и целевое использование: 1. Глобальной навигационной
- 6. Главной целью изучения курса «Основы спутниковой навигации и ее практического применения» является формирование у обучающихся комплексного
- 7. Навигация (лат. navigatio, от navigo – плыву на судне), как трактуется в учебниках по штурманскому делу,
- 8. Примерно до середины XX в. местоположение судна (географические широта и долгота) в открытом море определялось, в
- 9. В связи с упомянутыми недостатками астрономического способа определения местоположения судна примерно с 1940–х гг. стала широко
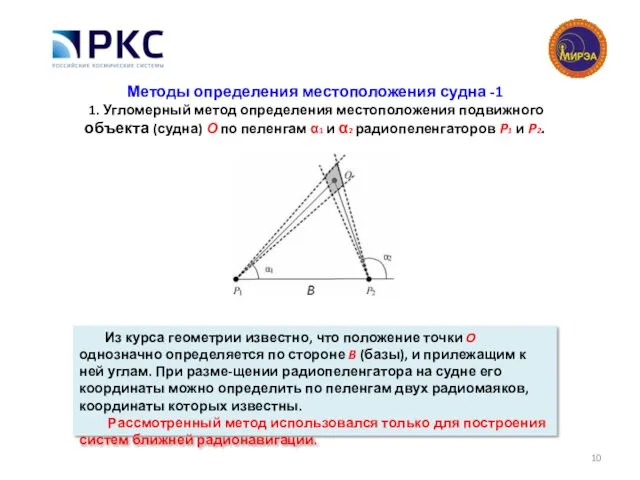
- 10. Методы определения местоположения судна -1 1. Угломерный метод определения местоположения подвижного объекта (судна) О по пеленгам
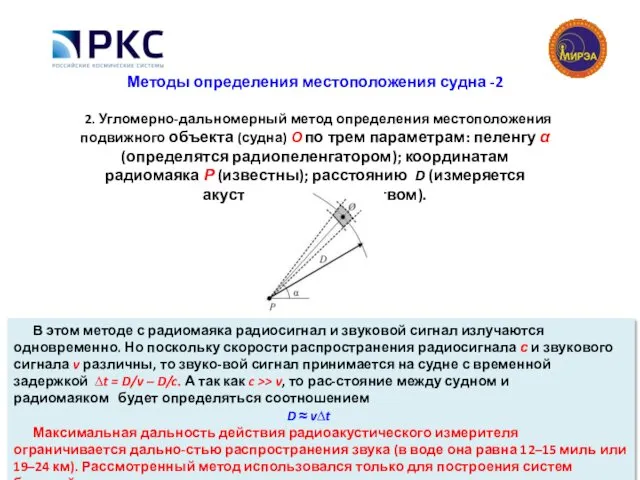
- 11. Методы определения местоположения судна -2 2. Угломерно-дальномерный метод определения местоположения подвижного объекта (судна) О по трем
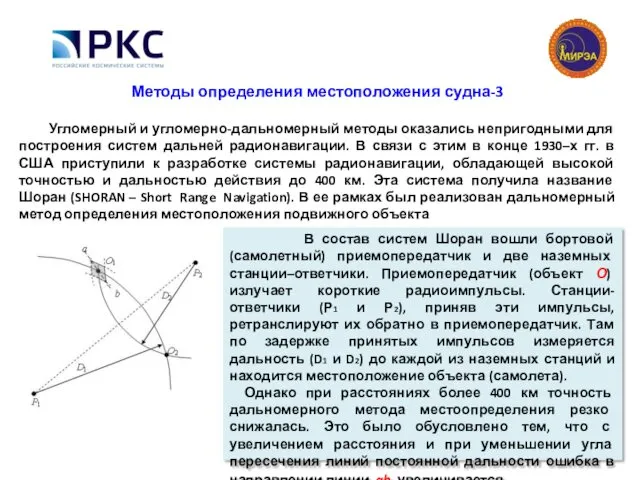
- 12. Методы определения местоположения судна-3 Угломерный и угломерно-дальномерный методы оказались непригодными для построения систем дальней радионавигации. В
- 13. Методы определения местоположения судна-4 Положительное решение было найдено с разработкой разностно-дальномерного (гиперболического) метода определения положения подвижного
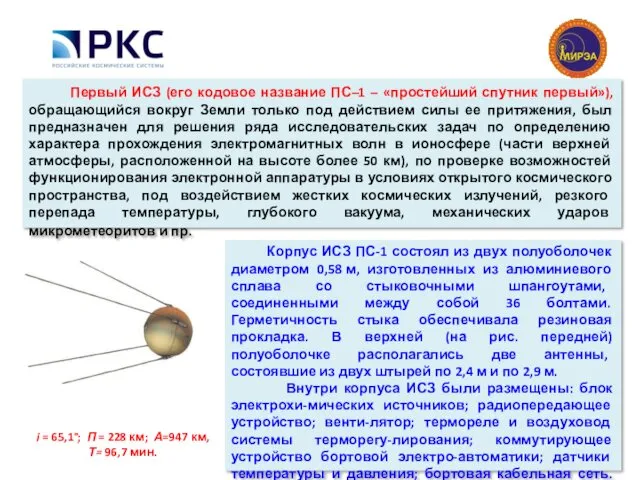
- 14. Первый ИСЗ (его кодовое название ПС–1 – «простейший спутник первый»), обращающийся вокруг Земли только под действием
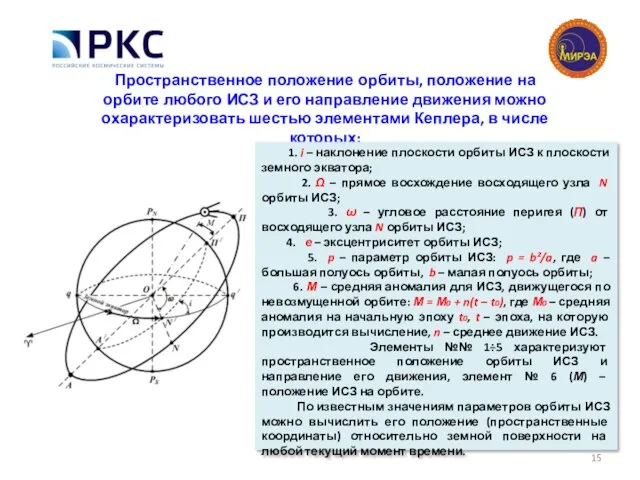
- 15. Пространственное положение орбиты, положение на орбите любого ИСЗ и его направление движения можно охарактеризовать шестью элементами
- 16. Принимая и анализируя радиосигнал, исходящий от ИСЗ ПС-1 (последний излучал радиоволны на двух частотах 20,005 и
- 17. Первый отечественный навигационный космический аппарат (НКА) Первый отечественный НКА «Залив» («Космос-192) СНС первого поколения «Циклон» был
- 18. Более совершенный отечественный НКА «Парус» В 1974 г. был запущен первый более совершенный НКА «Парус» («Космос–700»),
- 19. СНС «Цикада» В 1976 г. была разработана СНС «Цикада», предназначенная для удовлетворения потребностей не только ВМФ,
- 20. Проект КОСПАС–САРСАТ В начале 1980-х гг. НКА «Цикада» были дооборудованы аппаратурой обнаружения терпящих бедствие объектов, оснащенных
- 21. Уже за начальный период эксплуатации СНС первого поколения выяснилось, что ей присущ ряд недостатков, среди которых
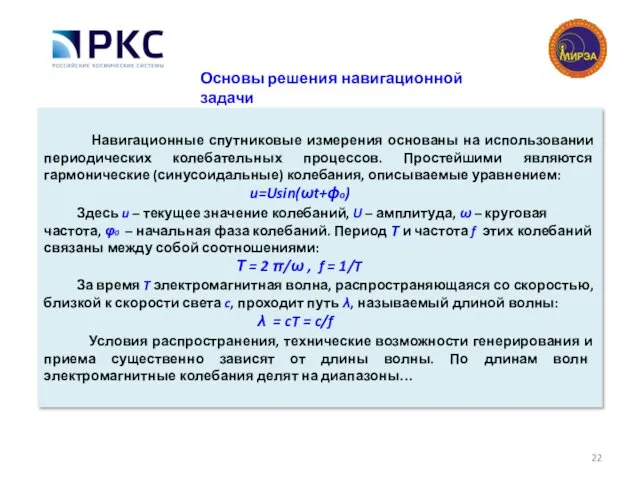
- 22. Основы решения навигационной задачи Навигационные спутниковые измерения основаны на использовании периодических колебательных процессов. Простейшими являются гармонические
- 23. Определение навигационного параметра (геометрическая дальность D от потребителя до НКА) осуществляется по известному значению скорости распространения
- 24. На практике задача точного определения параметра τ решается за счет генерации и передачи с НКА модулированного
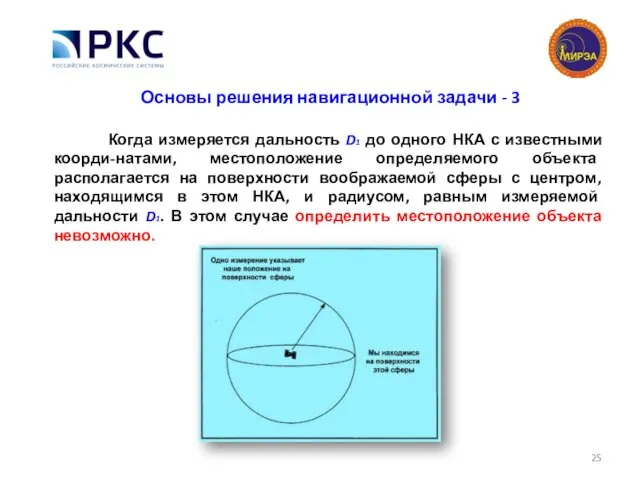
- 25. Основы решения навигационной задачи - 3 Когда измеряется дальность D1 до одного НКА с известными коорди-натами,
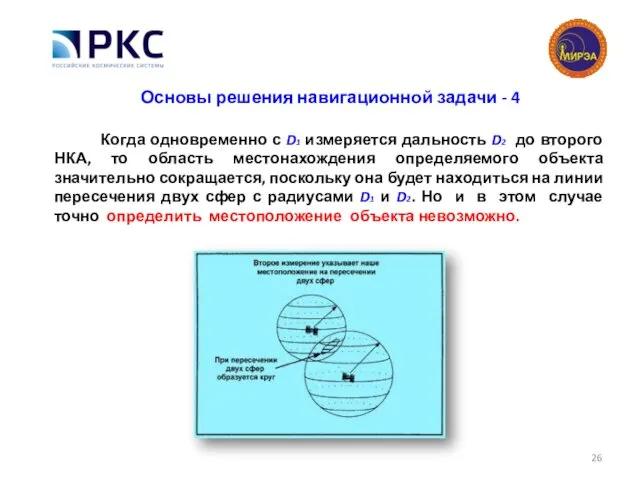
- 26. Основы решения навигационной задачи - 4 Когда одновременно с D1 измеряется дальность D2 до второго НКА,
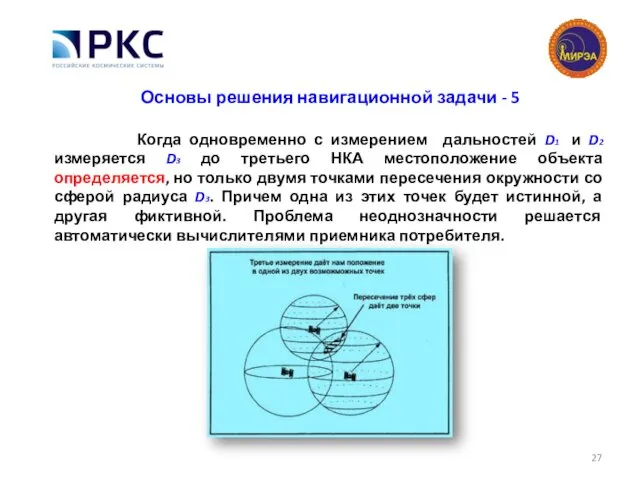
- 27. Основы решения навигационной задачи - 5 Когда одновременно с измерением дальностей D1 и D2 измеряется D3
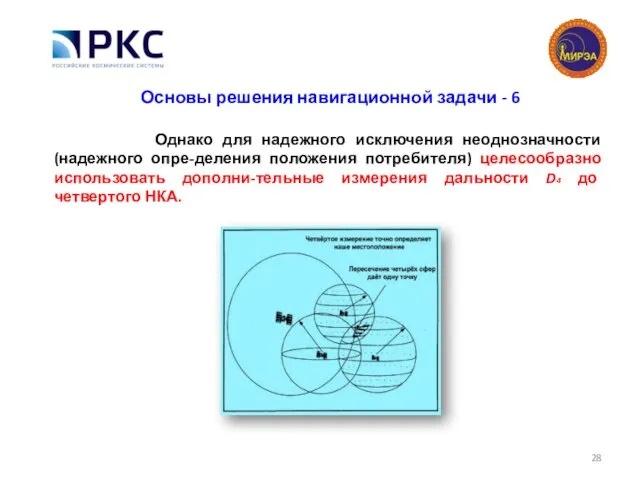
- 28. Основы решения навигационной задачи - 6 Однако для надежного исключения неоднозначности (надежного опре-деления положения потребителя) целесообразно
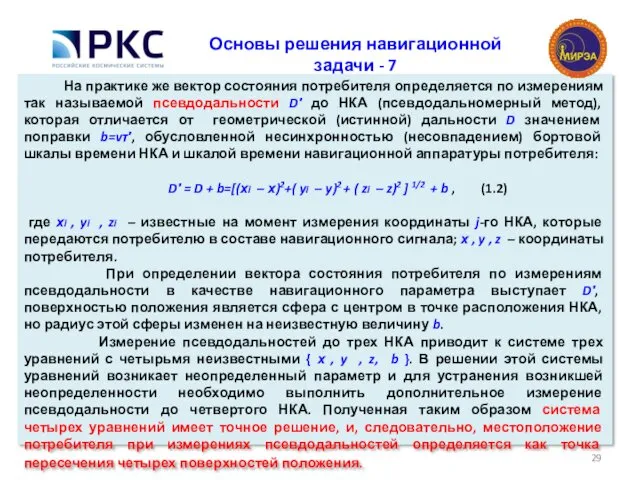
- 29. На практике же вектор состояния потребителя определяется по измерениям так называемой псевдодальности D′ до НКА (псевдодальномерный
- 30. Основы решения навигационной задачи - 8 Схема определения местоположения потребителя на основе измерений дальностей (псевдодальностей) до
- 31. В основу спутниковой навигации положено как минимум четыре идеи: Определение вектора состояния потребителя по измеренным расстояниям
- 32. Важнейшей компонентой векторов состояния НКА и потребителя являются координаты, при помощи которых определяется их положение. Координаты
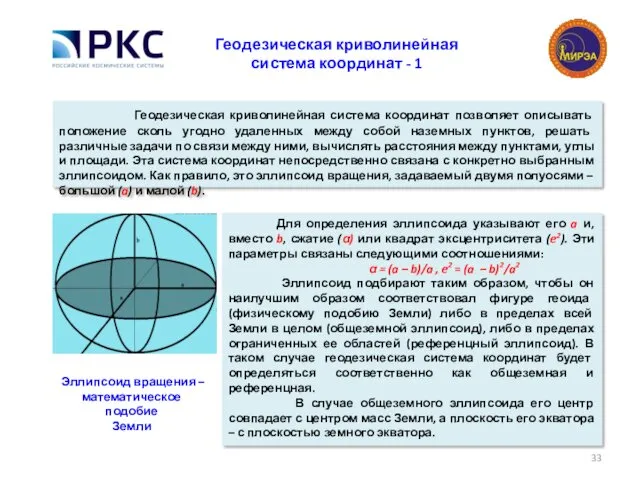
- 33. Геодезическая криволинейная система координат позволяет описывать положение сколь угодно удаленных между собой наземных пунктов, решать различные
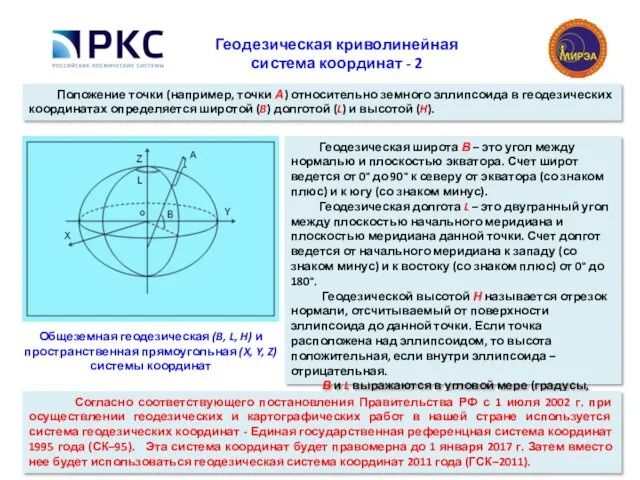
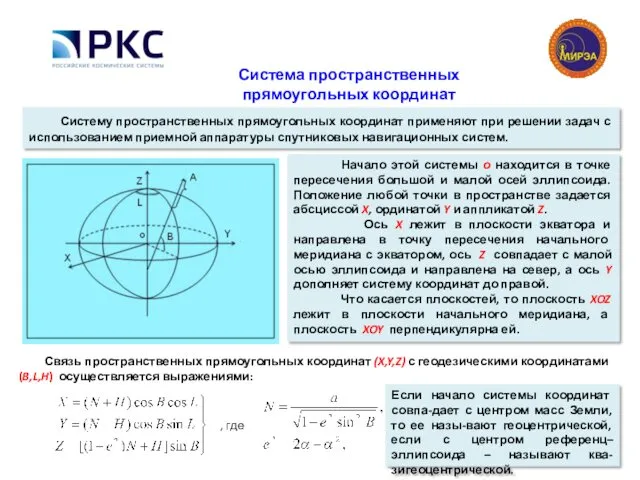
- 34. Геодезическая криволинейная система координат - 2 Положение точки (например, точки А) относительно земного эллипсоида в геодезических
- 35. Система пространственных прямоугольных координат Систему пространственных прямоугольных координат применяют при решении задач с использованием приемной аппаратуры
- 36. Основные геоцентрические прямоугольные системы координат В настоящее время для геодезического обеспечения орбитальных полетов НКА ГНСС ГЛОНАСС
- 38. Скачать презентацию
Лекция №1
Основы спутниковой навигации Изучаемые вопросы:
1. Введение в дисциплину.
2.
Лекция №1 Основы спутниковой навигации Изучаемые вопросы: 1. Введение в дисциплину. 2.
Рекомендуемая литература:
1. Малышев В.В., Куршин В.В., Ревнивых С. Г.
1. Малышев В.В., Куршин В.В., Ревнивых С. Г.
В рамках дисциплины «Программная инженерия» по согласованию руководителей
В рамках дисциплины «Программная инженерия» по согласованию руководителей
Основными направлениями деятельности корпорации «Российские космические системы» являются
Основными направлениями деятельности корпорации «Российские космические системы» являются
Главной целью изучения курса «Основы спутниковой навигации и
Главной целью изучения курса «Основы спутниковой навигации и
Навигация (лат. navigatio, от navigo – плыву на
Навигация (лат. navigatio, от navigo – плыву на

Примерно до середины XX в. местоположение судна (географические
Примерно до середины XX в. местоположение судна (географические
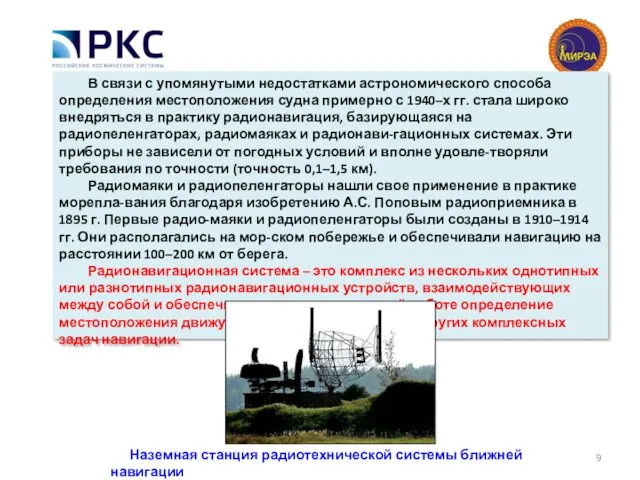
В связи с упомянутыми недостатками астрономического способа определения
В связи с упомянутыми недостатками астрономического способа определения
Методы определения местоположения судна -1
1. Угломерный метод определения
Методы определения местоположения судна -1
1. Угломерный метод определения
Методы определения местоположения судна -2
2. Угломерно-дальномерный метод определения
Методы определения местоположения судна -2
2. Угломерно-дальномерный метод определения
Методы определения местоположения судна-3
Угломерный и угломерно-дальномерный методы оказались
Методы определения местоположения судна-3
Угломерный и угломерно-дальномерный методы оказались

Методы определения местоположения судна-4
Положительное решение было найдено с
Методы определения местоположения судна-4
Положительное решение было найдено с
Первый ИСЗ (его кодовое название ПС–1 – «простейший
Первый ИСЗ (его кодовое название ПС–1 – «простейший
Пространственное положение орбиты, положение на орбите любого ИСЗ и
Пространственное положение орбиты, положение на орбите любого ИСЗ и
Принимая и анализируя радиосигнал, исходящий от ИСЗ ПС-1
Принимая и анализируя радиосигнал, исходящий от ИСЗ ПС-1
Первый отечественный навигационный космический аппарат (НКА)
Первый отечественный
Первый отечественный навигационный космический аппарат (НКА)
Первый отечественный

Более совершенный отечественный НКА «Парус»
В 1974 г.
Более совершенный отечественный НКА «Парус»
В 1974 г.
СНС «Цикада»
В 1976 г. была разработана СНС
СНС «Цикада»
В 1976 г. была разработана СНС
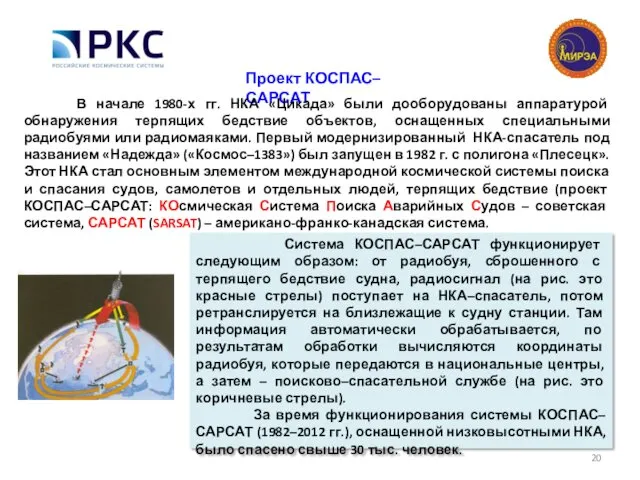
Проект КОСПАС–САРСАТ
В начале 1980-х гг. НКА «Цикада» были дооборудованы
Проект КОСПАС–САРСАТ
В начале 1980-х гг. НКА «Цикада» были дооборудованы
Уже за начальный период эксплуатации СНС первого поколения
Уже за начальный период эксплуатации СНС первого поколения
Основы решения навигационной задачи
Навигационные спутниковые измерения основаны
Основы решения навигационной задачи
Навигационные спутниковые измерения основаны
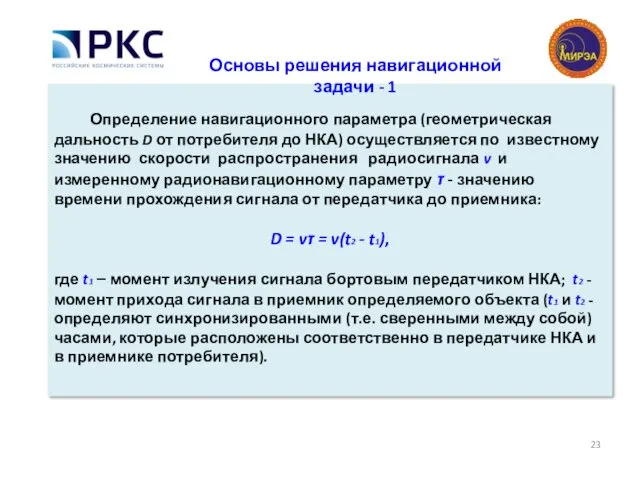
Определение навигационного параметра (геометрическая дальность D от потребителя до НКА) осуществляется
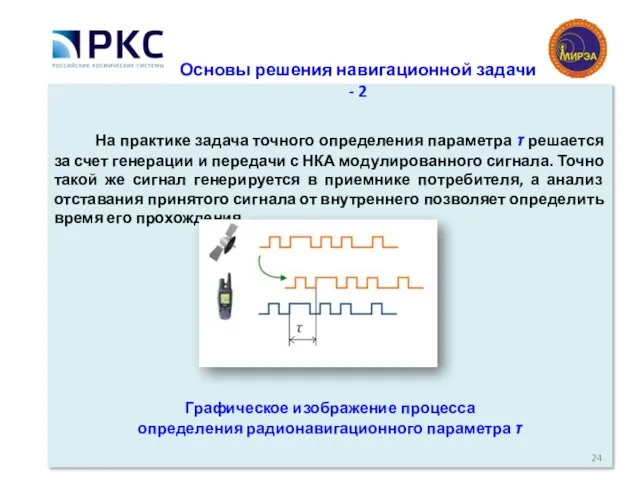
На практике задача точного определения параметра τ решается за счет генерации
Основы решения навигационной задачи - 3
Когда измеряется дальность D1 до
Основы решения навигационной задачи - 3
Когда измеряется дальность D1 до
Основы решения навигационной задачи - 4
Когда одновременно с D1 измеряется
Основы решения навигационной задачи - 4
Когда одновременно с D1 измеряется
Основы решения навигационной задачи - 5
Когда одновременно с измерением дальностей
Основы решения навигационной задачи - 5
Когда одновременно с измерением дальностей
Основы решения навигационной задачи - 6
Однако для надежного исключения неоднозначности
Основы решения навигационной задачи - 6
Однако для надежного исключения неоднозначности
На практике же вектор состояния потребителя определяется по измерениям так
На практике же вектор состояния потребителя определяется по измерениям так

Основы решения навигационной задачи - 8
Схема определения местоположения потребителя на основе
Основы решения навигационной задачи - 8
Схема определения местоположения потребителя на основе

В основу спутниковой навигации положено как минимум четыре идеи:
Определение вектора состояния
В основу спутниковой навигации положено как минимум четыре идеи:
Определение вектора состояния
Важнейшей компонентой векторов состояния НКА и потребителя являются координаты, при
Важнейшей компонентой векторов состояния НКА и потребителя являются координаты, при
Геодезическая криволинейная система координат позволяет описывать положение сколь угодно удаленных
Геодезическая криволинейная система координат позволяет описывать положение сколь угодно удаленных
Геодезическая криволинейная система координат - 2
Положение точки (например, точки А)
Геодезическая криволинейная система координат - 2
Положение точки (например, точки А)
Система пространственных прямоугольных координат
Систему пространственных прямоугольных координат применяют при решении
Система пространственных прямоугольных координат
Систему пространственных прямоугольных координат применяют при решении
Основные геоцентрические прямоугольные системы координат
В настоящее время для геодезического обеспечения
Основные геоцентрические прямоугольные системы координат
В настоящее время для геодезического обеспечения
 Экстраординарные сделки юридических лиц
Экстраординарные сделки юридических лиц Презентация.ИЗУЧАЕМ ПРАВИЛА ДОРОЖНОГО ДВИЖЕНИЯ Пешеходный переход
Презентация.ИЗУЧАЕМ ПРАВИЛА ДОРОЖНОГО ДВИЖЕНИЯ Пешеходный переход Психологический центр Атлас Таланта. Отчёт о прохождении ознакомительной практики
Психологический центр Атлас Таланта. Отчёт о прохождении ознакомительной практики Святая блаженная Матрона Московская
Святая блаженная Матрона Московская О святых людях. Лики святых.
О святых людях. Лики святых. Климат и человек (презентация 8 класс)
Климат и человек (презентация 8 класс) Наибольший общий делитель. 5 класс
Наибольший общий делитель. 5 класс Softline. Двадцать лет успеха в IT
Softline. Двадцать лет успеха в IT Педагогика в системе наук о человеке. (Тема 1)
Педагогика в системе наук о человеке. (Тема 1) Написание научной статьи
Написание научной статьи Строение периодической системы
Строение периодической системы Основные физические и химические величины
Основные физические и химические величины Архитектура современных компьютеров
Архитектура современных компьютеров Современные условия деятельности строительных организаций
Современные условия деятельности строительных организаций Информационная технология. Системная инженерия. Процессы жизненного цикла систем. ГОСТ Р ИСО/МЭК 15288-2005
Информационная технология. Системная инженерия. Процессы жизненного цикла систем. ГОСТ Р ИСО/МЭК 15288-2005 Неонкологические заболевания пищевода
Неонкологические заболевания пищевода Проверка ширины зева
Проверка ширины зева Системы виртуальной реальности. (Лекция 8)
Системы виртуальной реальности. (Лекция 8) Игорь Иванович Акимушкин (1929-1993)
Игорь Иванович Акимушкин (1929-1993) Основы геммологии
Основы геммологии Карбоновый пилинг
Карбоновый пилинг Кардиогендік шок
Кардиогендік шок Презентация Александр Алексеевич Головачев - дважды герой Советского Союза
Презентация Александр Алексеевич Головачев - дважды герой Советского Союза Темп в музыке и хореографии
Темп в музыке и хореографии Наша Родина - Россия. Символы России
Наша Родина - Россия. Символы России Презентация кружка В гостях у книжки
Презентация кружка В гостях у книжки Деловая игра Государство и право
Деловая игра Государство и право Технологии компьютерного моделирования
Технологии компьютерного моделирования