- Полетный контроллер квадрокоптера

Содержание
- 2. Полетный контроллер — это мозговой центр квадрокоптера, по сути миникомпьютер. Скорее всего, новичок растеряется в обилии
- 3. Полетные контроллеры делятся на 3 группы: Гоночные полетные контроллеры Контроллеры для съемки видео и фото с
- 4. Гоночные полетные контроллеры Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не
- 5. Контроллеры для съемки видео и фото с дрона Самым популярным в этом сегменте коптеров является DJI
- 6. Контроллеры для автономных полетов 3DR Pixhawk — самый популярный контроллер для автономных полетов. На его борту
- 7. Прошивки полетного контроллера, их виды Полетные контроллеры отличаются не только по типу компонентов, из которых они
- 8. CleanFlight
- 9. Betaflight;
- 10. Raceflight
- 11. Процессор полетного контроллера От процессора будет зависеть то, насколько быстро будут обрабатываться поступающие к нему данные.
- 12. Гироскоп и акселерометр полетного контроллера Гироскоп и акселерометр — очень важные датчики, они определяют положение квадрокоптера
- 13. Порт UART в полетном контроллере Аббревиатура UART с английского расшифровывается как (Universal Asynchronous Receiver/Transmitter) — универсальный
- 14. Размеры платы полетного контроллера Монтажная схема полетного контроллера — это расстояние между отверстиями для крепления ПК
- 15. Какие есть дополнительные функции в полетном контроллере? OSD OSD — это очень важная и нужная функция.
- 16. Датчик тока (Current Sensor) На плате разводки обычно есть контакты VBAT, куда подключаются контакты полетного контроллера
- 17. Типы коннекторов На полетном контроллере есть 3 типа соединений между периферией: Пластиковые коннекторы Контактные площадки для
- 18. Регулятор напряжения (BEC) На современных ПК есть отдельные контакты для подключения источника потребления на 5V и
- 19. Светодиод состояния Удобная функция, которая отображает текущее состояние полетного контроллера. Обычно у светодиода есть 2 цвета
- 21. Скачать презентацию
Полетный контроллер — это мозговой центр квадрокоптера, по сути миникомпьютер. Скорее всего,
Полетный контроллер — это мозговой центр квадрокоптера, по сути миникомпьютер. Скорее всего,
Полетные контроллеры делятся на 3 группы:
Гоночные полетные контроллеры
Контроллеры для
Полетные контроллеры делятся на 3 группы:
Гоночные полетные контроллеры
Контроллеры для

Гоночные полетные контроллеры
Обычно имеют минимум расширенных функций, так как всякие
Гоночные полетные контроллеры
Обычно имеют минимум расширенных функций, так как всякие

Контроллеры для съемки видео и фото с дрона
Самым популярным в
Контроллеры для съемки видео и фото с дрона
Самым популярным в

Контроллеры для автономных полетов
3DR Pixhawk — самый популярный контроллер для автономных
Контроллеры для автономных полетов
3DR Pixhawk — самый популярный контроллер для автономных
Прошивки полетного контроллера, их виды
Полетные контроллеры отличаются не только по
Прошивки полетного контроллера, их виды
Полетные контроллеры отличаются не только по
CleanFlight
CleanFlight
Betaflight;
Betaflight;
Raceflight
Raceflight
Процессор полетного контроллера
От процессора будет зависеть то, насколько быстро будут обрабатываться
Процессор полетного контроллера
От процессора будет зависеть то, насколько быстро будут обрабатываться

Гироскоп и акселерометр полетного контроллера
Гироскоп и акселерометр — очень важные
Гироскоп и акселерометр полетного контроллера
Гироскоп и акселерометр — очень важные
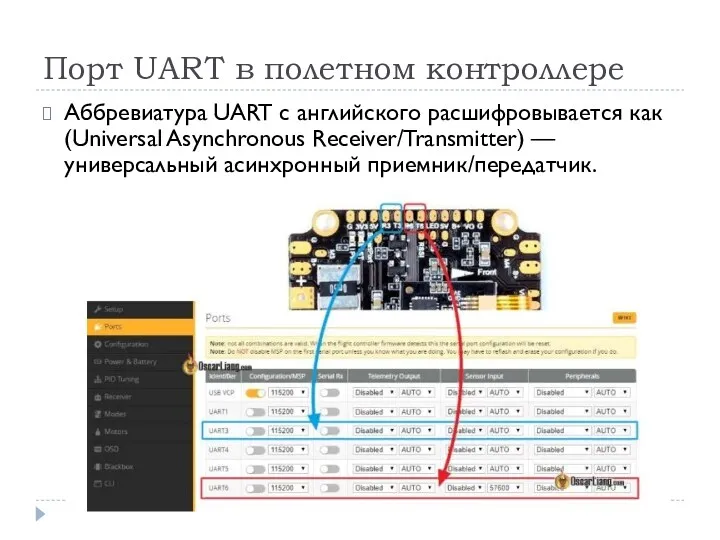
Порт UART в полетном контроллере
Аббревиатура UART с английского расшифровывается как
Порт UART в полетном контроллере
Аббревиатура UART с английского расшифровывается как

Размеры платы полетного контроллера
Монтажная схема полетного контроллера — это расстояние между
Размеры платы полетного контроллера
Монтажная схема полетного контроллера — это расстояние между
Какие есть дополнительные функции в полетном контроллере?
OSD OSD — это очень
Какие есть дополнительные функции в полетном контроллере?
OSD OSD — это очень
Датчик тока (Current Sensor) На плате разводки обычно есть контакты VBAT,
Датчик тока (Current Sensor) На плате разводки обычно есть контакты VBAT,

Типы коннекторов
На полетном контроллере есть 3 типа соединений между периферией:
Типы коннекторов
На полетном контроллере есть 3 типа соединений между периферией:
Регулятор напряжения
(BEC) На современных ПК есть отдельные контакты для подключения
Регулятор напряжения
(BEC) На современных ПК есть отдельные контакты для подключения
Светодиод состояния
Удобная функция, которая отображает текущее состояние полетного контроллера. Обычно
Светодиод состояния
Удобная функция, которая отображает текущее состояние полетного контроллера. Обычно
 С днем мамы
С днем мамы Семья пастора
Семья пастора Комплексные числа
Комплексные числа ФГОС в дошкольном образовании
ФГОС в дошкольном образовании Пластиковые окна или старые деревянные
Пластиковые окна или старые деревянные Битва под Сталинградом
Битва под Сталинградом Устный журнал Путешествие по планете Памяти
Устный журнал Путешествие по планете Памяти Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.3)
Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.3) Саванны. Субэкваториальный климатический пояс
Саванны. Субэкваториальный климатический пояс Воспитательная система класса
Воспитательная система класса Презентация Семья и школа в формировании личности ребенка
Презентация Семья и школа в формировании личности ребенка Clothes and Fashion
Clothes and Fashion Ограничение облучения от природных источников
Ограничение облучения от природных источников Презентация к викторине У сказки тихий голосок.
Презентация к викторине У сказки тихий голосок. Сюжетно-ролевая игра
Сюжетно-ролевая игра Мастер моего села
Мастер моего села Блиц-опрос Я знаю лес
Блиц-опрос Я знаю лес Концепция педагогической деятельности
Концепция педагогической деятельности System administracji publicznej w Hondurasie
System administracji publicznej w Hondurasie GP USB DownLoad Manual (English_Version)
GP USB DownLoad Manual (English_Version) Параллельность прямых в пространстве
Параллельность прямых в пространстве Хранение дел организации. (Тема 4)
Хранение дел организации. (Тема 4) Формирование комфортной городской среды
Формирование комфортной городской среды PML30_SummerPractice2022_Presentation_Pattern
PML30_SummerPractice2022_Presentation_Pattern Декоративный пейзаж
Декоративный пейзаж Пищевая сода. Необычное в обычном
Пищевая сода. Необычное в обычном Как научить своего ребёнка жить в мире людей. Уроки этики поведения для детей и родителей
Как научить своего ребёнка жить в мире людей. Уроки этики поведения для детей и родителей Выдающиеся открытия в области химии
Выдающиеся открытия в области химии