- Предложение по организации системы безопасности охраняемых объектов

Содержание
- 2. Предложение по организации системы безопасности охраняемых объектов. 1. Структура системы безопасности охраняемых объектов (СБОО) (рис. 1)
- 3. 2.2. Аппаратно-программный комплекс обработки данных и связи (АПКОДС). АПКОДС должен обеспечивать решение следующих задач: • Управление
- 4. 2.5. Гидроакустические системы мониторинга подводной обстановки (рис. 4). Основные задачи ГСМПО: • мониторинг подводной обстановки; •
- 5. 2.8. Надводные носители. Основная задача надводных носителей: • мониторинг надводной обстановки в прибрежной зоне; • высадка
- 6. Рис. 1 Структурная схема системы безопасности охраняемых объектов
- 7. Рис. 2 Радиолокационная станция с АФАР. Краткие технические характеристики Диапазон волн - X Зона наблюдения: по
- 8. Краткие технические характеристики Максимальная скорость разворота оси визирования – 60 угл.град/с. Точность наведения и стабилизации оси
- 9. Рис. 4 Гидроакустические системы мониторинга подводной обстановки. Гидроакустические системы обеспечивают: 1. Автоматизированное обнаружение подводных (малоразмерных) целей,
- 10. Рис. 5 Автосопровождение самолета ОЭС узкое поле зрения, черно-белая телевизионная камера.
- 11. Рис. 6 Автосопровождение самолета ОЭС широкое поле зрения, цветная телевизионная камера.
- 12. Рис. 7 Автосопровождение самолета ОЭС сверхузкое поле зрения, черно-белая телевизионная камера.
- 13. Рис. 8 Автосопровождение самолета ОЭС, тепловизионая камера.
- 14. Рис. 9 Беспилотный вертолет большой грузоподъемности.
- 15. Рис. 10. Малогабаритный беспилотный квадрокоптер с ОЭС.
- 16. Рис. 11. Быстроходный катер с дистанционно управляемым боевым модулем
- 17. Рис. 12 Боевой дистанционно-управляемый модуль.
- 18. Рис. 13 Безэкипажный катер.
- 20. Скачать презентацию
Предложение по организации системы безопасности охраняемых объектов.
1. Структура системы безопасности охраняемых
Предложение по организации системы безопасности охраняемых объектов.
1. Структура системы безопасности охраняемых
2.2. Аппаратно-программный комплекс обработки данных и связи (АПКОДС). АПКОДС должен
2.2. Аппаратно-программный комплекс обработки данных и связи (АПКОДС). АПКОДС должен
2.5. Гидроакустические системы мониторинга подводной обстановки (рис. 4).
Основные задачи
2.5. Гидроакустические системы мониторинга подводной обстановки (рис. 4).
Основные задачи
2.8. Надводные носители.
Основная задача надводных носителей:
• мониторинг надводной обстановки в прибрежной
2.8. Надводные носители.
Основная задача надводных носителей:
• мониторинг надводной обстановки в прибрежной

Рис. 1 Структурная схема системы безопасности охраняемых объектов
Рис. 1 Структурная схема системы безопасности охраняемых объектов
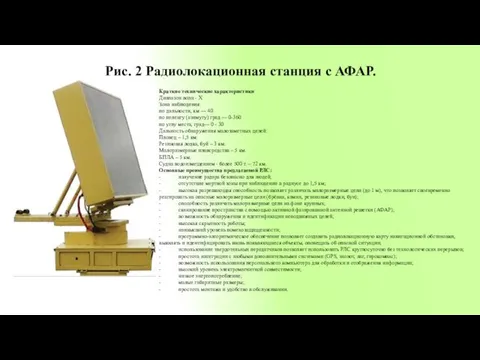
Рис. 2 Радиолокационная станция с АФАР.
Краткие технические характеристики
Диапазон волн - X
Зона
Рис. 2 Радиолокационная станция с АФАР.
Краткие технические характеристики
Диапазон волн - X
Зона

Краткие технические характеристики
Максимальная скорость разворота оси визирования – 60 угл.град/с.
Точность наведения
Краткие технические характеристики
Максимальная скорость разворота оси визирования – 60 угл.град/с.
Точность наведения
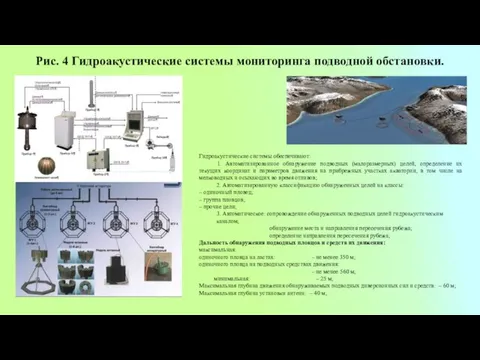
Рис. 4 Гидроакустические системы мониторинга подводной обстановки.
Гидроакустические системы обеспечивают:
1. Автоматизированное обнаружение
Рис. 4 Гидроакустические системы мониторинга подводной обстановки.
Гидроакустические системы обеспечивают:
1. Автоматизированное обнаружение
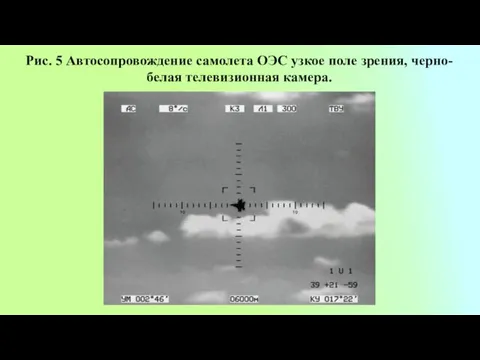
Рис. 5 Автосопровождение самолета ОЭС узкое поле зрения, черно-белая телевизионная камера.
Рис. 5 Автосопровождение самолета ОЭС узкое поле зрения, черно-белая телевизионная камера.
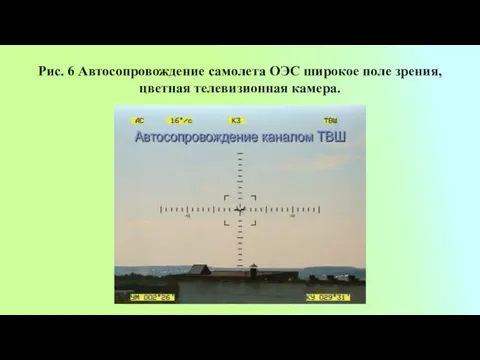
Рис. 6 Автосопровождение самолета ОЭС широкое поле зрения, цветная телевизионная камера.
Рис. 6 Автосопровождение самолета ОЭС широкое поле зрения, цветная телевизионная камера.
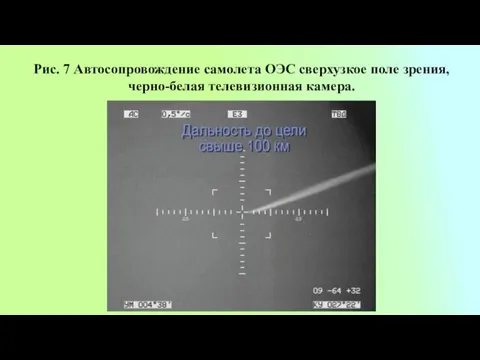
Рис. 7 Автосопровождение самолета ОЭС сверхузкое поле зрения, черно-белая телевизионная камера.
Рис. 7 Автосопровождение самолета ОЭС сверхузкое поле зрения, черно-белая телевизионная камера.
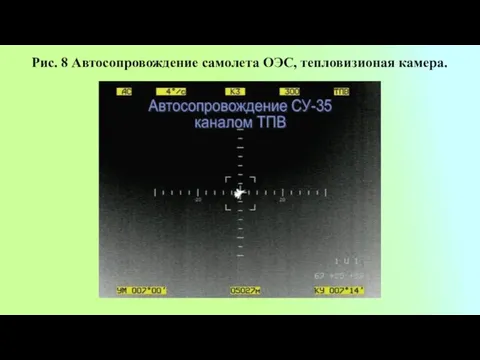
Рис. 8 Автосопровождение самолета ОЭС, тепловизионая камера.
Рис. 8 Автосопровождение самолета ОЭС, тепловизионая камера.

Рис. 9 Беспилотный вертолет большой грузоподъемности.
Рис. 9 Беспилотный вертолет большой грузоподъемности.

Рис. 10. Малогабаритный беспилотный квадрокоптер с ОЭС.
Рис. 10. Малогабаритный беспилотный квадрокоптер с ОЭС.
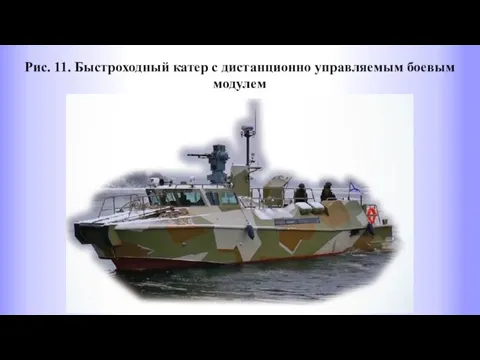
Рис. 11. Быстроходный катер с дистанционно управляемым боевым модулем
Рис. 11. Быстроходный катер с дистанционно управляемым боевым модулем

Рис. 12 Боевой дистанционно-управляемый модуль.
Рис. 12 Боевой дистанционно-управляемый модуль.
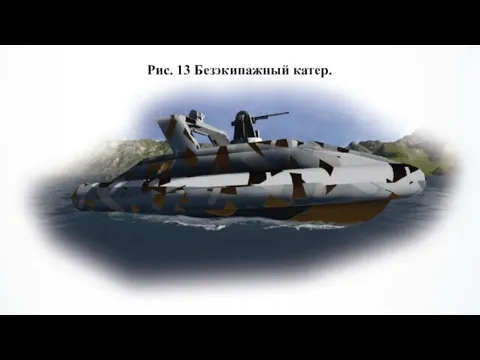
Рис. 13 Безэкипажный катер.
Рис. 13 Безэкипажный катер.
 Финансовое планирование
Финансовое планирование Интерактивная экскурсия Пирамиды Гизы (Египетские пирамиды)
Интерактивная экскурсия Пирамиды Гизы (Египетские пирамиды) Взаимодействие семьи и школы (презентация)
Взаимодействие семьи и школы (презентация)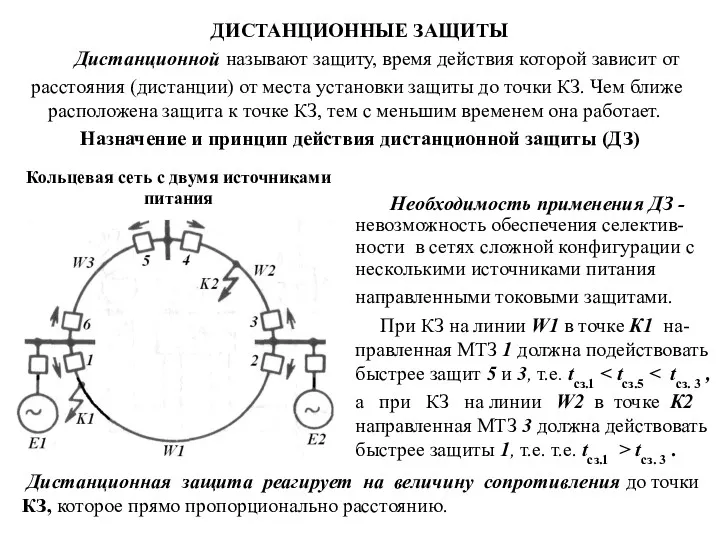 Дистанционные защиты
Дистанционные защиты Послание к Ефесянам
Послание к Ефесянам Презентация. Организация ситуации успеха в учебно - воспитательном процессе.
Презентация. Организация ситуации успеха в учебно - воспитательном процессе.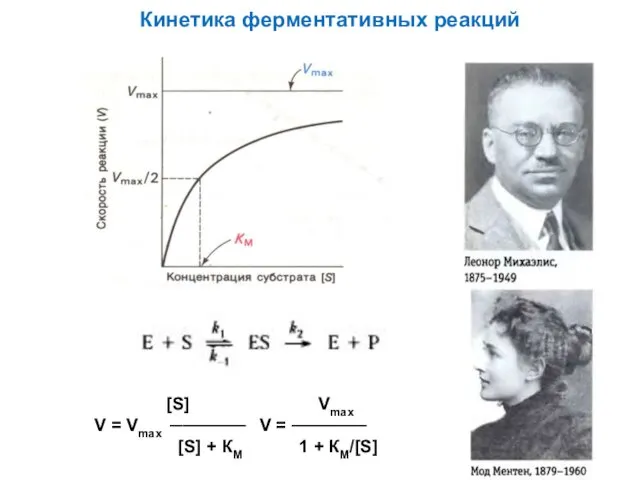 Кинетика ферментативных реакций
Кинетика ферментативных реакций Моделирование фотоэлектрических характеристик твердотельных фотоприемников
Моделирование фотоэлектрических характеристик твердотельных фотоприемников Николай Рубцов
Николай Рубцов Neural Networks
Neural Networks Новая линейка дебетовых карт для зарплатных клиентов
Новая линейка дебетовых карт для зарплатных клиентов Онкология. Отличия доброкачественных опухолей от злокачественных
Онкология. Отличия доброкачественных опухолей от злокачественных 20230329_dlya_izucheniya_v_penii_1
20230329_dlya_izucheniya_v_penii_1 Внеклассное мероприятие Звёздный час
Внеклассное мероприятие Звёздный час Көру мүшелерінің құрылысы. Көрудің маңызы. Көру қызметінің бұзылуы. Көру гигиенасы
Көру мүшелерінің құрылысы. Көрудің маңызы. Көру қызметінің бұзылуы. Көру гигиенасы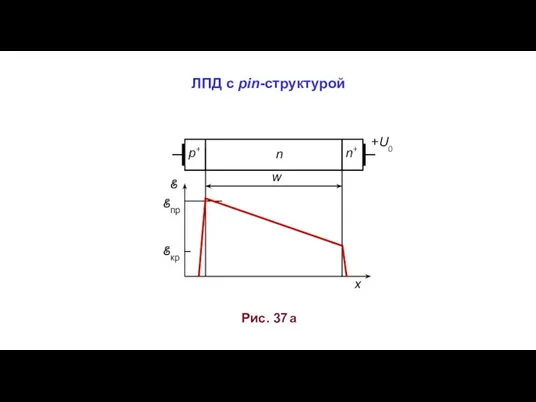 ЛПД с pin-структурой
ЛПД с pin-структурой Obuchenie_KTs_i_TsI
Obuchenie_KTs_i_TsI Строение и классификация плодов
Строение и классификация плодов Александрийский маяк
Александрийский маяк Составляющие и функции операционной системы Linux
Составляющие и функции операционной системы Linux Сако-скифская цивилизация
Сако-скифская цивилизация Конспект урока по технологии 2 класс Я- парикмахер
Конспект урока по технологии 2 класс Я- парикмахер Государственный строй стран мира
Государственный строй стран мира Презентация Детство, опаленное войной
Презентация Детство, опаленное войной Классификация сталей. Термическая обработка сталей
Классификация сталей. Термическая обработка сталей Адаптируем технологии сами.
Адаптируем технологии сами. Физические свойства нефти и газа
Физические свойства нефти и газа Основные свойства кристаллов
Основные свойства кристаллов