- Презентация Microsoft PowerPoint (1)

Содержание
- 2. Актуальність та мета бакалаврської роботи СЛАЙД 2 Розвиток сучасної робототехніки починає стрімко охоплюють принципово нові прикладні
- 3. 1. Аналіз принципів побудування інтелектуальних систем управління мобільними комплексами; 2. Дослідження алгоритму управління роботом із застосуванням
- 4. Призначення та сфера застосування інтелектуальних мобільних робототехнічних комплексів Рис.1.Прикладизастосування інтелектуальних роботів СЛАЙД 4 Передбачається, що ІМР
- 5. Огляд засобів та методів відчуття роботів СЛАЙД 5 Рис.2. Елементи відчуття ІМР: а) Мобільний робот із
- 6. Структура та особливості побудови інтелектуальних систем управління СЛАЙД 6 Рис.4 - Загальна структурна схема інтелектуальної системи
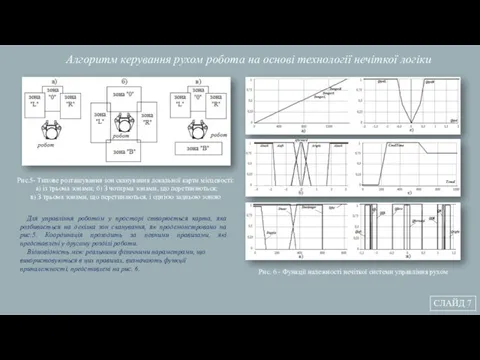
- 7. СЛАЙД 7 Алгоритм керування рухом робота на основі технології нечіткої логіки Рис. 6 - Функції належності
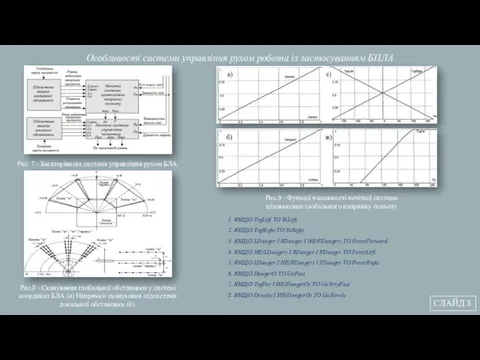
- 8. СЛАЙД 8 Особливості системи управління рухом робота із застосуванням БПЛА Рис. 7 - Багаторівнева система управління
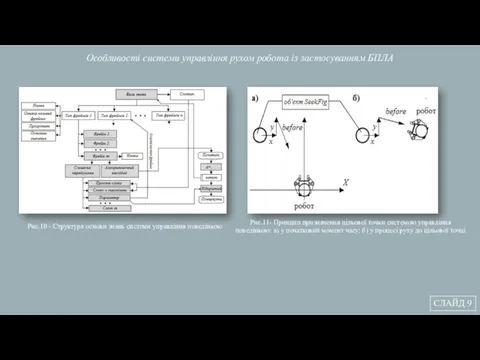
- 9. СЛАЙД 9 Рис.10 - Структура основи знань системи управління поведінкою Особливості системи управління рухом робота із
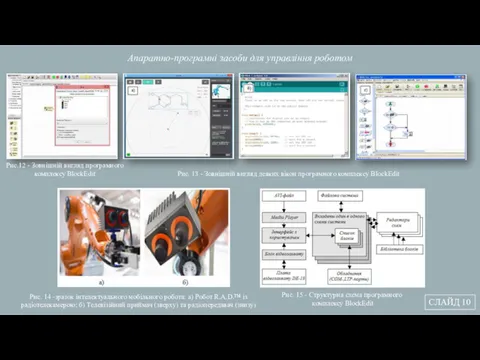
- 10. СЛАЙД 10 Апаратно-програмні засоби для управління роботом Рис. 15 - Структурна схема програмного комплексу BlockEdit Рис.12
- 11. СЛАЙД 11 Висновки 1. Проведено комплексний аналіз призначення та областей застосування, особливостей конструктивної реалізації, апаратного та
- 13. Скачать презентацию
Актуальність та мета бакалаврської роботи
СЛАЙД 2
Розвиток сучасної робототехніки починає стрімко охоплюють
Актуальність та мета бакалаврської роботи
СЛАЙД 2
Розвиток сучасної робототехніки починає стрімко охоплюють
1. Аналіз принципів побудування інтелектуальних систем управління мобільними комплексами;
2. Дослідження алгоритму
1. Аналіз принципів побудування інтелектуальних систем управління мобільними комплексами;
2. Дослідження алгоритму

Призначення та сфера застосування інтелектуальних мобільних робототехнічних комплексів
Рис.1.Прикладизастосування інтелектуальних роботів
СЛАЙД 4
Передбачається,
Призначення та сфера застосування інтелектуальних мобільних робототехнічних комплексів
Рис.1.Прикладизастосування інтелектуальних роботів
СЛАЙД 4
Передбачається,
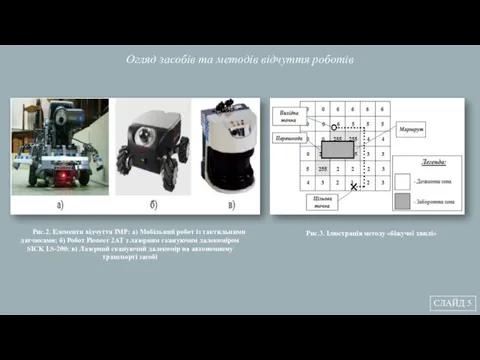
Огляд засобів та методів відчуття роботів
СЛАЙД 5
Рис.2. Елементи відчуття ІМР: а)
Огляд засобів та методів відчуття роботів
СЛАЙД 5
Рис.2. Елементи відчуття ІМР: а)
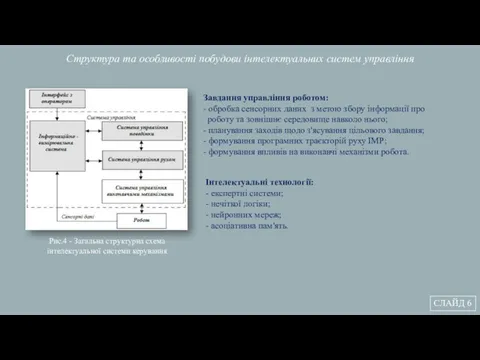
Структура та особливості побудови інтелектуальних систем управління
СЛАЙД 6
Рис.4 - Загальна
Структура та особливості побудови інтелектуальних систем управління
СЛАЙД 6
Рис.4 - Загальна
СЛАЙД 7
Алгоритм керування рухом робота на основі технології нечіткої логіки
Рис.
СЛАЙД 7
Алгоритм керування рухом робота на основі технології нечіткої логіки
Рис.
СЛАЙД 8
Особливості системи управління рухом робота із застосуванням БПЛА
Рис. 7 -
СЛАЙД 8
Особливості системи управління рухом робота із застосуванням БПЛА
Рис. 7 -
СЛАЙД 9
Рис.10 - Структура основи знань системи управління поведінкою
Особливості системи управління
СЛАЙД 9
Рис.10 - Структура основи знань системи управління поведінкою
Особливості системи управління
СЛАЙД 10
Апаратно-програмні засоби для управління роботом
Рис. 15 - Структурна схема програмного
СЛАЙД 10
Апаратно-програмні засоби для управління роботом
Рис. 15 - Структурна схема програмного
СЛАЙД 11
Висновки
1. Проведено комплексний аналіз призначення та областей застосування, особливостей конструктивної
СЛАЙД 11
Висновки
1. Проведено комплексний аналіз призначення та областей застосування, особливостей конструктивної
 Агропромышленный комплекс. Лёгкая и пищевая промышленность
Агропромышленный комплекс. Лёгкая и пищевая промышленность Проект по рассказу Л. Андреева Кусака
Проект по рассказу Л. Андреева Кусака Затухающие колебания
Затухающие колебания Звукоизоляционные материалы
Звукоизоляционные материалы Лето -лучший период для творчества
Лето -лучший период для творчества Анализ эпизода. Герои романа Л. Н. Толстого Война и мир на войне 1805 года. Шенграбенское сражение
Анализ эпизода. Герои романа Л. Н. Толстого Война и мир на войне 1805 года. Шенграбенское сражение Структура земляного баласта на насыпи или выемках железной дороги
Структура земляного баласта на насыпи или выемках железной дороги Технология. Мыловарение
Технология. Мыловарение Системы селекции движущихся целей
Системы селекции движущихся целей Роль религии в жизни общества
Роль религии в жизни общества Reported speech
Reported speech Этиология, патогенез, диагностика и клиническая картина сахарного диабета
Этиология, патогенез, диагностика и клиническая картина сахарного диабета Рост населения земли
Рост населения земли Классный час. Права и обязанности подростка. Уголовная ответственность несовершеннолетних
Классный час. Права и обязанности подростка. Уголовная ответственность несовершеннолетних Разрезание и складывание плоских фигур. Занятие 2
Разрезание и складывание плоских фигур. Занятие 2 Скорые фильтры. Потери напора при промывке фильтра
Скорые фильтры. Потери напора при промывке фильтра Устройство Компьютера. Современный компьютер
Устройство Компьютера. Современный компьютер Презентация проекта Чистюлька
Презентация проекта Чистюлька Углеродистые и легированные стали
Углеродистые и легированные стали ZINE
ZINE Право и его роль в жизни общества и государства
Право и его роль в жизни общества и государства Осевая симметрия
Осевая симметрия день здоровья Широкая масленица
день здоровья Широкая масленица Влияние мультфильмов на развитие ребенка дошкольного возраста
Влияние мультфильмов на развитие ребенка дошкольного возраста Георгий Валентинович Плеханов
Георгий Валентинович Плеханов Вешняки. Восточный административный округ города Москвы
Вешняки. Восточный административный округ города Москвы Өй эшләрен тикшерү. “Бөтен тигезләмәләрне график юл белән чишү
Өй эшләрен тикшерү. “Бөтен тигезләмәләрне график юл белән чишү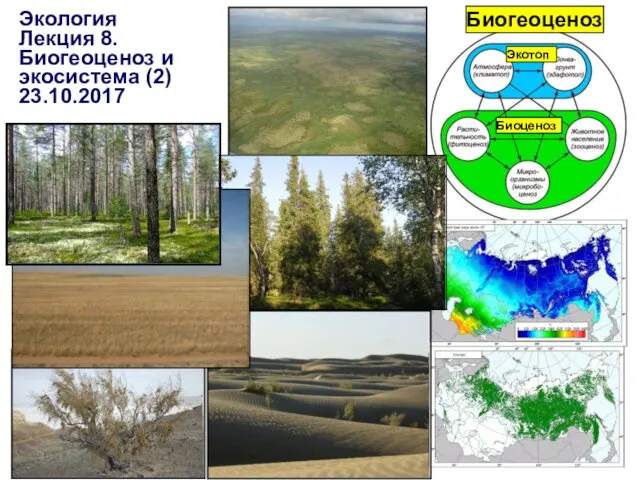 Биогеоценоз и экосистема (2)
Биогеоценоз и экосистема (2)