- Системы селекции движущихся целей

Содержание
- 2. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Аппаратура для борьбы
- 3. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Когерентно-импульсный метод СДЦ основан на различии в характеристиках сигналов,
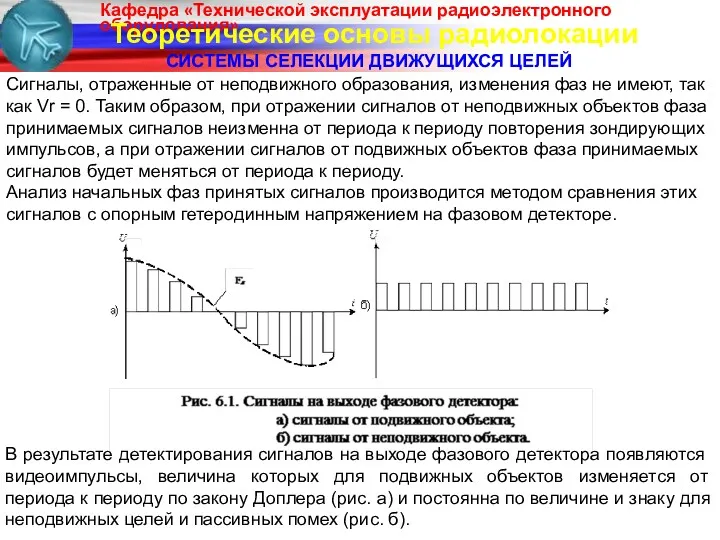
- 4. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Сигналы, отраженные от неподвижного образования, изменения фаз не имеют,
- 5. Классификация систем СДЦ В когерентно-импульсных РЛС различают несколько видов фазовой когерентности опорного и зондирующего сигналов. Истинная
- 6. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Истинно — когерентные РЛС обычно сложнее по построению, чем
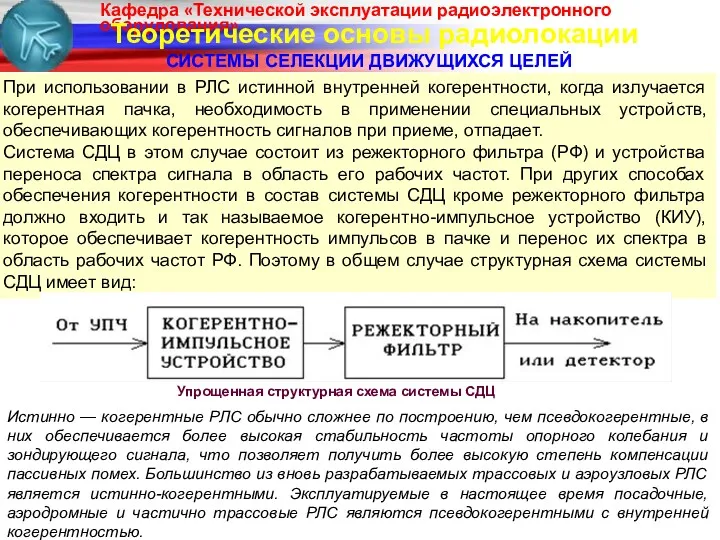
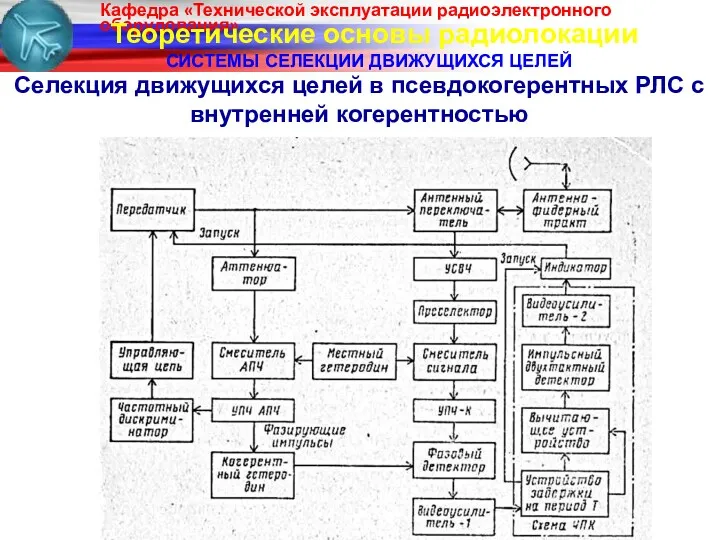
- 7. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Селекция движущихся целей в псевдокогерентных РЛС с внутренней когерентностью
- 9. Скачать презентацию
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Аппаратура
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Аппаратура
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Когерентно-импульсный метод СДЦ основан на
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Когерентно-импульсный метод СДЦ основан на
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Сигналы, отраженные от неподвижного образования,
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Сигналы, отраженные от неподвижного образования,
Классификация систем СДЦ
В когерентно-импульсных РЛС различают несколько видов фазовой когерентности опорного
Классификация систем СДЦ
В когерентно-импульсных РЛС различают несколько видов фазовой когерентности опорного
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Истинно — когерентные РЛС обычно
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Истинно — когерентные РЛС обычно
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Селекция движущихся целей в псевдокогерентных
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Селекция движущихся целей в псевдокогерентных
 Тестовая работа по химии.Тема Жиры.
Тестовая работа по химии.Тема Жиры. Применение солнечных электростанций в энергоэффективном (энергоактивном) архитектурном проектировании
Применение солнечных электростанций в энергоэффективном (энергоактивном) архитектурном проектировании Складки – собственная геометрия. Собственные геометрические параметры складок
Складки – собственная геометрия. Собственные геометрические параметры складок Автоматическое регулирование технологических процессов. Системы автоматического регулирования
Автоматическое регулирование технологических процессов. Системы автоматического регулирования Философия XIX века
Философия XIX века Педагогика профессионального образования (занятие 1)
Педагогика профессионального образования (занятие 1) Образовательное пространство в дошкольном учреждении
Образовательное пространство в дошкольном учреждении Правление Ивана IV
Правление Ивана IV Качество медицинских товаров и его свойства
Качество медицинских товаров и его свойства Профессии воды.
Профессии воды. Презентация 8 Марта
Презентация 8 Марта Лакокрасочные товары
Лакокрасочные товары PPE_ JOCAP 3
PPE_ JOCAP 3 Різноманітність комах та хребетних тварин луки
Різноманітність комах та хребетних тварин луки Культура Руси XIII-XIV веков
Культура Руси XIII-XIV веков Рыцари
Рыцари Эпоха гуннов
Эпоха гуннов Препарация зубов под Targis/Vectris
Препарация зубов под Targis/Vectris Происхождение человека
Происхождение человека Понятие и система показателей качества продукции
Понятие и система показателей качества продукции Время реакции человека
Время реакции человека Антарктида. Природа.
Антарктида. Природа. Объёмные цветы
Объёмные цветы Презентация к рассказу К. Паустовского Кот- ворюга
Презентация к рассказу К. Паустовского Кот- ворюга Основы теории государства. Конституционный строй Российской Федерации
Основы теории государства. Конституционный строй Российской Федерации Музыкально - дидактическая интерактивная игра Музыкальные инструменты
Музыкально - дидактическая интерактивная игра Музыкальные инструменты Размерный анализ. Точность технологических операций
Размерный анализ. Точность технологических операций проект игрушечный город
проект игрушечный город