- Принципы построения спутниковых радионавигационных систем

Содержание
- 2. Пусть в точке А (см. рисунок) с известными координатами хA = {хА, уА} расположен один маяк,
- 3. Если потребитель знает значения R1, и R2, он может определить собственный координаты из решения системы уравнений
- 4. Значения R1, и R2 можно определить, например, излучая из точек А и Б радиосигналы и измеряя
- 5. В СРНС в качестве маяков выступают навигационные спутники (НС), с которых излучаются радиосигналы. Особенностью таких маяков
- 6. Положим, что потребитель измеряет все необходимые дальности в один момент времени tп , причем такие, что
- 7. В приведенных рассужде-ниях неявно полагалось, что есть абсолютное время t, которое «доступно» как потребителю, так и
- 8. Для построения СРНС необходимо: - задать систему (системы) пространственных координат; - задать системы отсчета времени; -
- 9. Наряду с перечисленными выше задачами, которые необходимо решать при построении СРНС, к ней предъявляются дополнительные требования:
- 10. Удовлетворение первого требования обеспечивается выбором параметров орбит навигационных спутников и их расположением на орбитах. Для решения
- 11. 3) излучения сигналов с НС с достаточной мощностью; 4) использования высокоточной информации о параметрах движения НС;
- 12. 1.2 Обобщенная структура спутниковой радионавигационной системы
- 13. Реализация перечисленных задач и требований возможна в сетевой структуре СРНС, включающей три основные подсистемы (см. рисунок):
- 14. Подсистема космических аппаратов Подсистема космических аппаратов СРНС состоит из определенного числа навигационных спутников (штатно 24 НС),
- 15. Подсистема контроля и управления Наземная подсистема контроля и управления выполняет следующие основные задачи: - высокоточное измерение
- 16. Процедуру определения и прогноза параметров движе-ния всех НС с помощью наземных средств и передачу этой информации
- 17. Навигационная аппаратура потребителей Навигационная аппаратура потребителей предназначена для приема и обработки радиосигналов НС с целью определения
- 19. Скачать презентацию
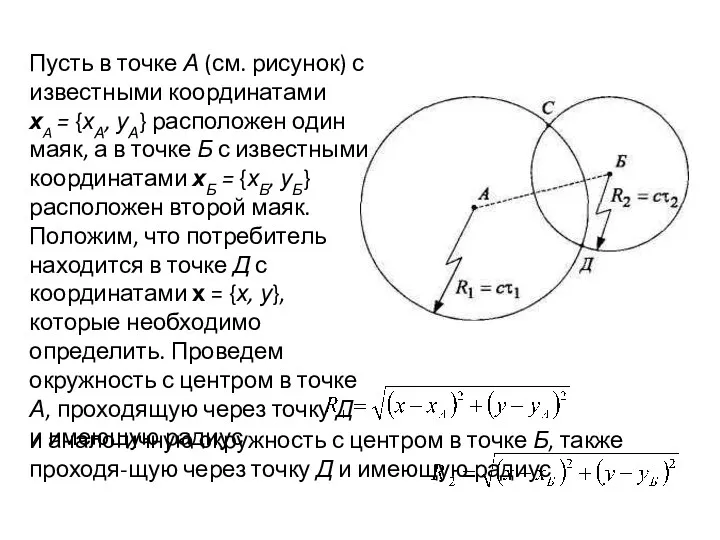
Пусть в точке А (см. рисунок) с известными координатами хA = {хА, уА} расположен
Пусть в точке А (см. рисунок) с известными координатами хA = {хА, уА} расположен

Если потребитель знает значения R1, и R2, он может определить собственный
Если потребитель знает значения R1, и R2, он может определить собственный
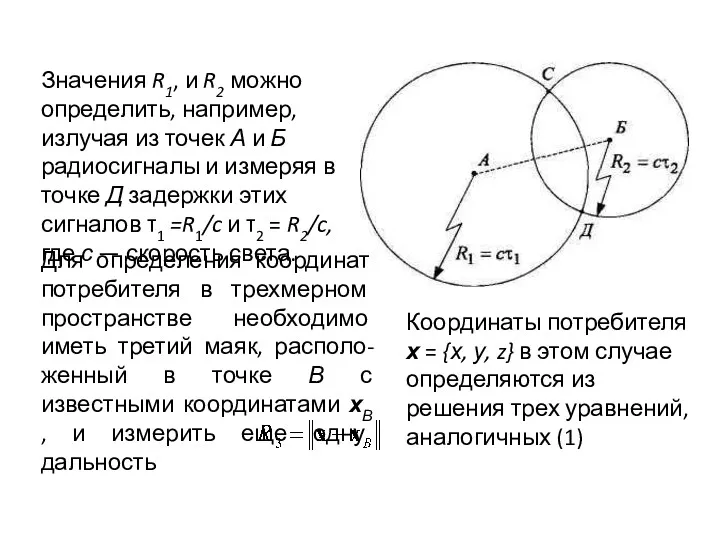
Значения R1, и R2 можно определить, например, излучая из точек А
Значения R1, и R2 можно определить, например, излучая из точек А
В СРНС в качестве маяков выступают навигационные спутники (НС), с которых
В СРНС в качестве маяков выступают навигационные спутники (НС), с которых

Положим, что потребитель измеряет все необходимые дальности в один момент времени
Положим, что потребитель измеряет все необходимые дальности в один момент времени
В приведенных рассужде-ниях неявно полагалось, что есть абсолютное время t, которое
В приведенных рассужде-ниях неявно полагалось, что есть абсолютное время t, которое
Для построения СРНС необходимо:
- задать систему (системы) пространственных координат;
- задать системы
Для построения СРНС необходимо:
- задать систему (системы) пространственных координат;
- задать системы
Наряду с перечисленными выше задачами, которые необходимо решать при построении СРНС,
Наряду с перечисленными выше задачами, которые необходимо решать при построении СРНС,
Удовлетворение первого требования обеспечивается выбором параметров орбит навигационных спутников и их
Удовлетворение первого требования обеспечивается выбором параметров орбит навигационных спутников и их
3) излучения сигналов с НС с достаточной мощностью;
4) использования высокоточной информации
3) излучения сигналов с НС с достаточной мощностью;
4) использования высокоточной информации

1.2 Обобщенная структура спутниковой радионавигационной системы
1.2 Обобщенная структура спутниковой радионавигационной системы
Реализация перечисленных задач и требований возможна в сетевой структуре СРНС, включающей
Реализация перечисленных задач и требований возможна в сетевой структуре СРНС, включающей
Подсистема космических аппаратов
Подсистема космических аппаратов СРНС состоит из определенного числа навигационных
Подсистема космических аппаратов
Подсистема космических аппаратов СРНС состоит из определенного числа навигационных
Подсистема контроля и управления
Наземная подсистема контроля и управления выполняет следующие основные
Подсистема контроля и управления
Наземная подсистема контроля и управления выполняет следующие основные
Процедуру определения и прогноза параметров движе-ния всех НС с помощью наземных
Процедуру определения и прогноза параметров движе-ния всех НС с помощью наземных
Навигационная аппаратура потребителей
Навигационная аппаратура потребителей предназначена для приема и обработки радиосигналов
Навигационная аппаратура потребителей
Навигационная аппаратура потребителей предназначена для приема и обработки радиосигналов
 Умники и умницы
Умники и умницы Факторы, влияющие на проектирование жилища
Факторы, влияющие на проектирование жилища Пайка и лужение проводов и наконечников
Пайка и лужение проводов и наконечников Курортный район СПб
Курортный район СПб Презентация познавательно - речевое развитие в первой младшей группе.
Презентация познавательно - речевое развитие в первой младшей группе. Биография Леонида Васильевича Лапцуя
Биография Леонида Васильевича Лапцуя Трудовое право
Трудовое право презентация Пластилиновая фантазия
презентация Пластилиновая фантазия Инфекционное заболевание туберкулез
Инфекционное заболевание туберкулез Возможности программного обеспечения организации коллективной деятельности в глобальных и локальных компьютерных сетях
Возможности программного обеспечения организации коллективной деятельности в глобальных и локальных компьютерных сетях Общая теория права. Понятие правоотношений
Общая теория права. Понятие правоотношений Обзор иностранных источников по темам: Внутренняя оценка качества образования, Самооценка в системе оценки качества школ
Обзор иностранных источников по темам: Внутренняя оценка качества образования, Самооценка в системе оценки качества школ Использование проектного метода в олимпийском образовании дошкольников
Использование проектного метода в олимпийском образовании дошкольников Профессиональная пригодность
Профессиональная пригодность Цементаж. Порядок цементирования хвостовика
Цементаж. Порядок цементирования хвостовика Пользовательский интерфейс
Пользовательский интерфейс Гиполипидемические (противоатеросклеротические) лекарственные средства
Гиполипидемические (противоатеросклеротические) лекарственные средства Умей говорить Нет! вредным привычкам.
Умей говорить Нет! вредным привычкам. Основы теории надежности и диагностики
Основы теории надежности и диагностики Средства измерения расхода и количества вещества
Средства измерения расхода и количества вещества Новогодняя открытка. Рисуем пошагово
Новогодняя открытка. Рисуем пошагово Методика преподавания естествознания
Методика преподавания естествознания Физиология курсына кіріспе. Жасуша, ультрақұрылымдары, қызметтері. Қызметтердің реттелуі туралы ұғым. Қозғыш тіндер
Физиология курсына кіріспе. Жасуша, ультрақұрылымдары, қызметтері. Қызметтердің реттелуі туралы ұғым. Қозғыш тіндер Моя театральная деятельность Диск
Моя театральная деятельность Диск Органы чувств. Зрительный и слуховой анализаторы. Органы вкуса, обоняния. Кожный покров
Органы чувств. Зрительный и слуховой анализаторы. Органы вкуса, обоняния. Кожный покров Русская изба. Горница
Русская изба. Горница Формула Пика
Формула Пика Внеклассное мероприятие Спорт в жизни человека
Внеклассное мероприятие Спорт в жизни человека