- Радионавигационные системы

Содержание
- 2. Бортовые радионавигационные системы: - радиотехнические системы ближней навигации (РСБН); - комплексная радионавигационная система, включающая в себя
- 3. Радиосистемы ближней навигации
- 4. Назначение радиосистем ближней навигации – определение местоположения самолета на расстояниях до 400 километров от радионавигационных точек.
- 5. Назначение радиосистем ближней навигации Определение азимута ЛА относительно радиомаяка. Определение наклонной дальности от ЛА до радиомаяка.
- 6. Радиосистемы ближней навигации Отечественная система РСБН – определение местоположения самолета, привод самолета в заданную точку в
- 7. Радиосистема РСБН
- 8. Радиосистема VOR/DME
- 9. Принцип действия дальномерного канала РСБН 1 – запрос дальности, 2 – прием запроса дальности, 3 –
- 10. Принцип действия азимутального канала РСБН Диаграмма направленности азимутальной антенны в горизонтальной плоскости
- 11. Определение координат по нескольким дальностям DME Определение местоположения по двум дальностям
- 12. Основные причины погрешностей радиосистем ближней навигации 1. Помехи, поступающие на вход бортового приемника Случайные погрешности, вызванные
- 13. Оценивание РСБН в летных испытаниях Пример оценивания погрешности ΔА азимута РСБН
- 14. Пример оценивания погрешности ΔD дальности РСБН
- 15. Пример оценивания погрешности ΔА азимута VOR
- 16. Пример оценивания погрешности ΔD дальности DME
- 17. Радиотехнические системы посадки
- 18. Назначение радиосистемы посадки – определение отклонений от заданной траектории посадки. Угломерные каналы системы основаны на амплитудных
- 19. Типы радиомаячных систем посадки Метрового диапазона ILS (Instrument Landing System), Метрового диапазона СП-50 Дециметрового диапазона ПРМГ
- 20. Курсовой радиомаяк ILS
- 21. Глиссадный радиомаяк ILS
- 22. Схема функционирования курсового и глиссадного радиомаяков ILS
- 23. Категории систем посадки
- 25. Размещение радиомаяков посадочных систем
- 26. Проекция на плоскость земли Проекция на плоскость курса
- 27. РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ ПОСАДКИ В комплекс ПНК могут входить приемники систем ILS/СП-50 и РСБН, работающие в режиме
- 28. Пример оценивания погрешности по курсу радиотехнической системы посадки
- 29. Автоматический радиокомпас (АРК) Кабина Як-18т. АРК предназначен для навигации летательных аппаратов по сигналам наземных радиостанций путём
- 30. Автоматический радиокомпас
- 31. Пример оценивания параметра КУР при пролете над радиостанцией
- 32. Доплеровский измеритель скорости самолета (ДИСС)
- 33. Определение угла сноса
- 34. Погрешности параметров ДИСС на участке полета
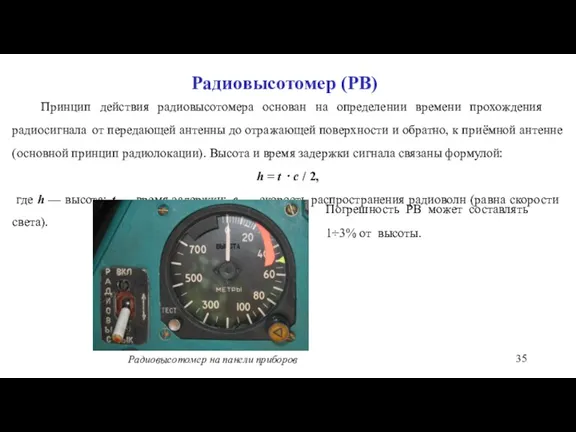
- 35. Радиовысотомер (РВ) Принцип действия радиовысотомера основан на определении времени прохождения радиосигнала от передающей антенны до отражающей
- 36. Погрешности высоты радиовысотомера
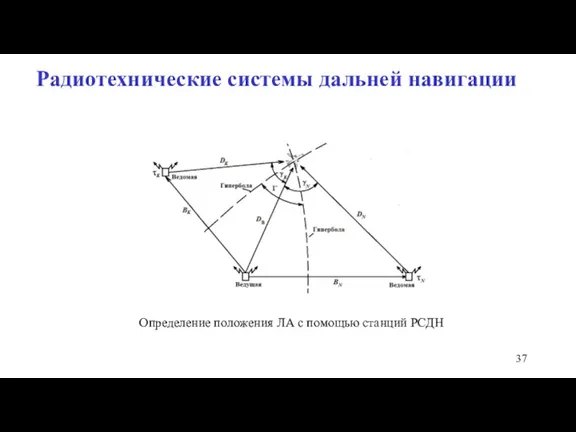
- 37. Радиотехнические системы дальней навигации Определение положения ЛА с помощью станций РСДН
- 38. Примеры радиотехнических систем дальней навигации OMEGA – фазовая радионавигационная система (США). АЛЬФА (Маршрут) – фазовая радионавигационная
- 39. Фазовая радионавигационная система АЛЬФА (Маршрут) Состоит из 4 станций: Комсомольск-на-Амуре, Новосибирск, Краснодар, пос. Ревда (Мурманская область)
- 40. Расположение наземных станций и зона покрытия системы АЛЬФА
- 41. Расположение наземных станций и зона покрытия системы OMEGA
- 42. Импульсно-фазовые радионавигационные системы Станции работают группами, каждая из групп образует цепь станций. Цепь включает в себя
- 43. Устранение фазовой неоднозначности в системах LORAN-C и «Чайка» Измерения производится импульсно-фазовым методом: грубое измерение разности дальностей
- 44. Зона покрытия систем LORAN-С и «Чайка»
- 45. Основные характеристики радиосистем дальней навигации
- 46. Основные причины погрешностей радиосистем дальней навигации 1. Помехи, поступающие на вход бортового приемника. Наибольшая погрешность связана
- 47. Оценка сигналов отклонений от глиссады ILS в летных испытаниях
- 48. Оценка азимута VIM в летных испытаниях
- 49. Оценка измерений высоты РВ в летных испытаниях
- 51. Скачать презентацию
Бортовые радионавигационные системы:
- радиотехнические системы ближней навигации (РСБН);
- комплексная радионавигационная система,
Бортовые радионавигационные системы:
- радиотехнические системы ближней навигации (РСБН);
- комплексная радионавигационная система,

Радиосистемы ближней навигации
Радиосистемы ближней навигации
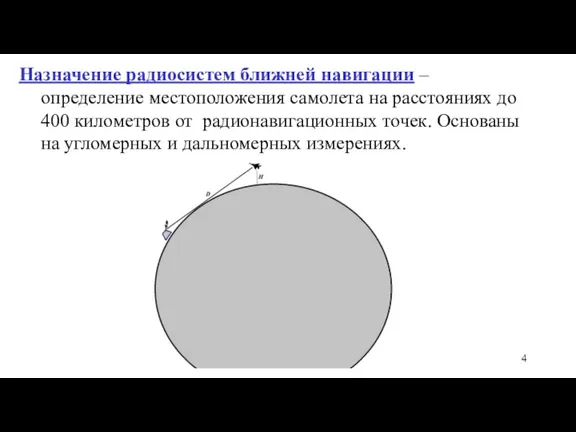
Назначение радиосистем ближней навигации – определение местоположения самолета на расстояниях до
Назначение радиосистем ближней навигации – определение местоположения самолета на расстояниях до
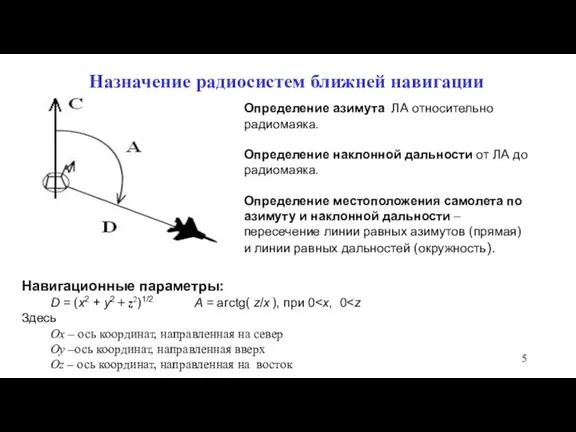
Назначение радиосистем ближней навигации
Определение азимута ЛА относительно радиомаяка.
Определение наклонной дальности от
Назначение радиосистем ближней навигации
Определение азимута ЛА относительно радиомаяка.
Определение наклонной дальности от
Радиосистемы ближней навигации
Отечественная система РСБН – определение местоположения самолета, привод самолета
Радиосистемы ближней навигации
Отечественная система РСБН – определение местоположения самолета, привод самолета

Радиосистема РСБН
Радиосистема РСБН
Радиосистема VOR/DME
Радиосистема VOR/DME
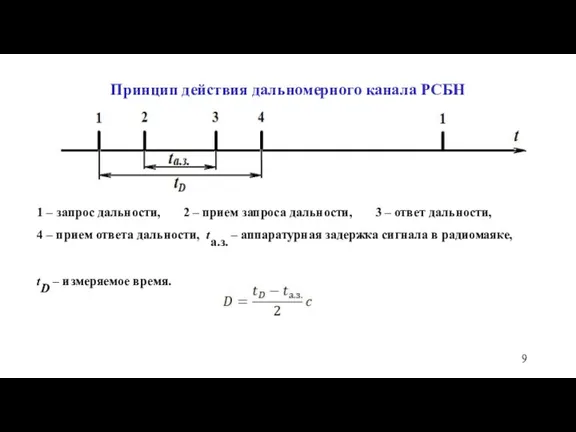
Принцип действия дальномерного канала РСБН
1 – запрос дальности, 2 – прием
Принцип действия дальномерного канала РСБН
1 – запрос дальности, 2 – прием

Принцип действия азимутального канала РСБН
Диаграмма направленности азимутальной антенны в горизонтальной плоскости
Принцип действия азимутального канала РСБН
Диаграмма направленности азимутальной антенны в горизонтальной плоскости

Определение координат по нескольким дальностям DME
Определение местоположения по двум дальностям
Определение координат по нескольким дальностям DME
Определение местоположения по двум дальностям
Основные причины погрешностей радиосистем ближней навигации
1. Помехи, поступающие на вход бортового
Основные причины погрешностей радиосистем ближней навигации
1. Помехи, поступающие на вход бортового
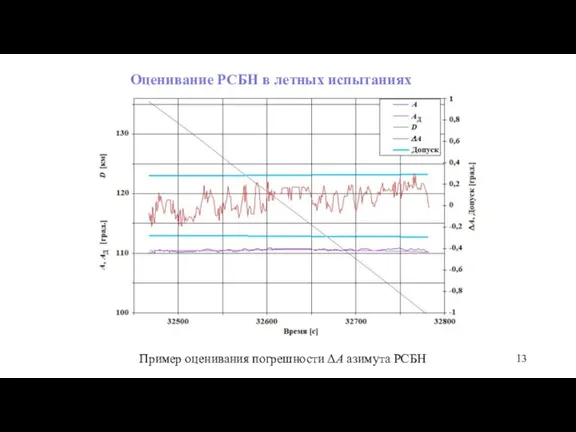
Оценивание РСБН в летных испытаниях
Пример оценивания погрешности ΔА азимута РСБН
Оценивание РСБН в летных испытаниях
Пример оценивания погрешности ΔА азимута РСБН
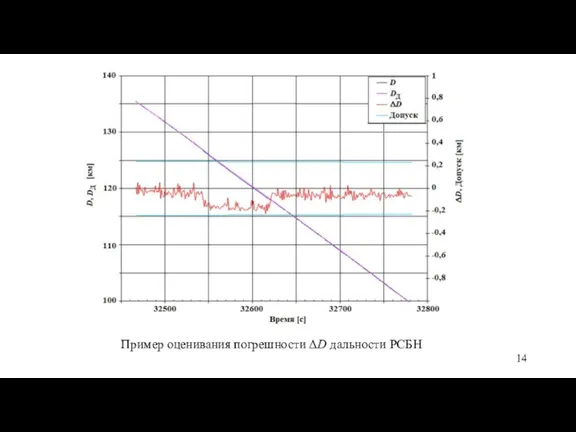
Пример оценивания погрешности ΔD дальности РСБН
Пример оценивания погрешности ΔD дальности РСБН
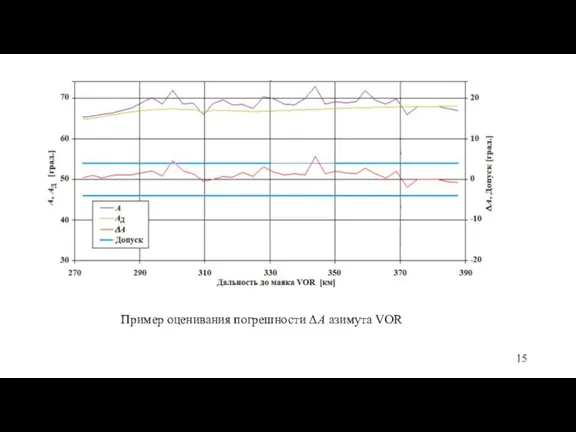
Пример оценивания погрешности ΔА азимута VOR
Пример оценивания погрешности ΔА азимута VOR
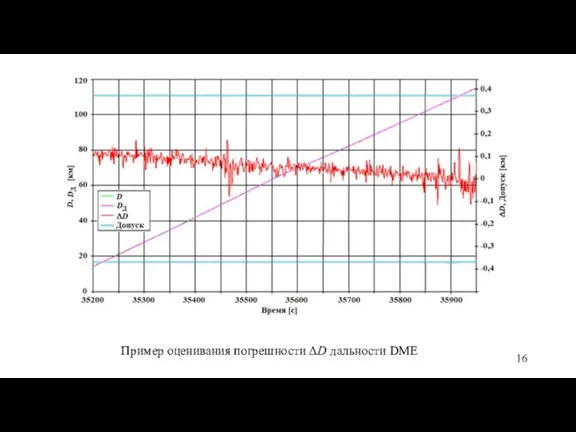
Пример оценивания погрешности ΔD дальности DME
Пример оценивания погрешности ΔD дальности DME
Радиотехнические системы посадки
Радиотехнические системы посадки
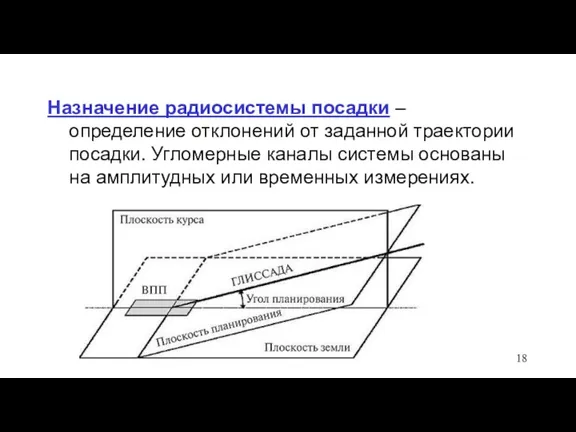
Назначение радиосистемы посадки – определение отклонений от заданной траектории посадки. Угломерные
Назначение радиосистемы посадки – определение отклонений от заданной траектории посадки. Угломерные
Типы радиомаячных систем посадки
Метрового диапазона ILS (Instrument Landing System),
Метрового диапазона
Типы радиомаячных систем посадки
Метрового диапазона ILS (Instrument Landing System),
Метрового диапазона

Курсовой радиомаяк ILS
Курсовой радиомаяк ILS
Глиссадный радиомаяк ILS
Глиссадный радиомаяк ILS

Схема функционирования курсового и глиссадного радиомаяков ILS
Схема функционирования курсового и глиссадного радиомаяков ILS
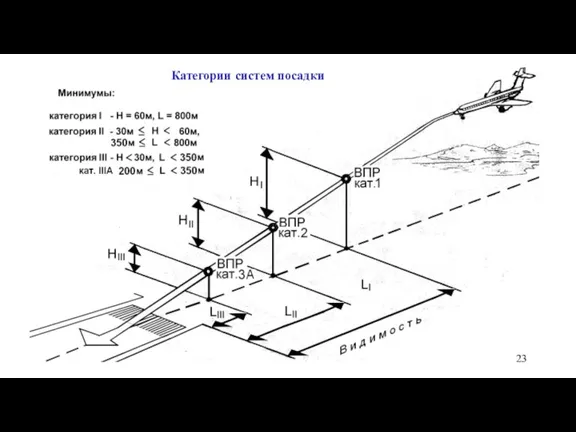
Категории систем посадки
Категории систем посадки

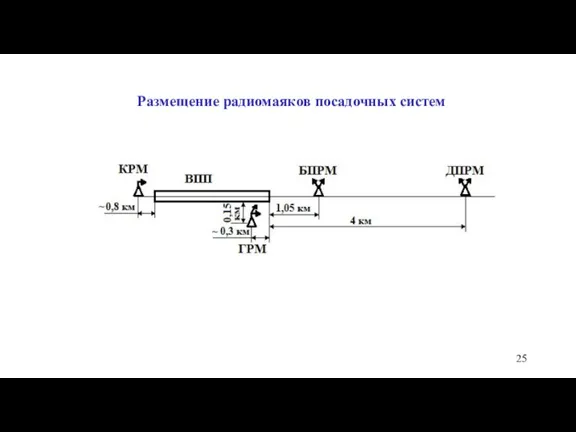
Размещение радиомаяков посадочных систем
Размещение радиомаяков посадочных систем
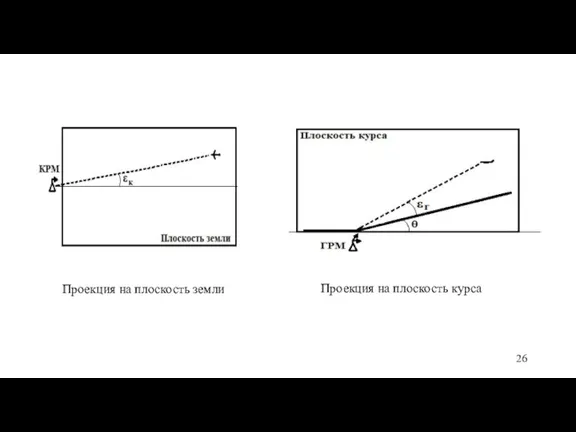
Проекция на плоскость земли
Проекция на плоскость курса
Проекция на плоскость земли
Проекция на плоскость курса
РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ ПОСАДКИ
В комплекс ПНК могут входить приемники систем
РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ ПОСАДКИ
В комплекс ПНК могут входить приемники систем
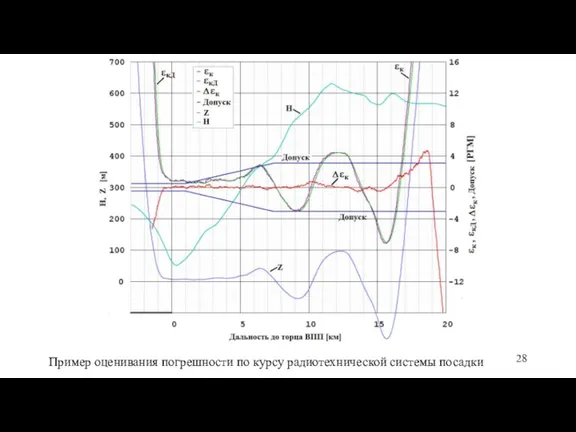
Пример оценивания погрешности по курсу радиотехнической системы посадки
Пример оценивания погрешности по курсу радиотехнической системы посадки
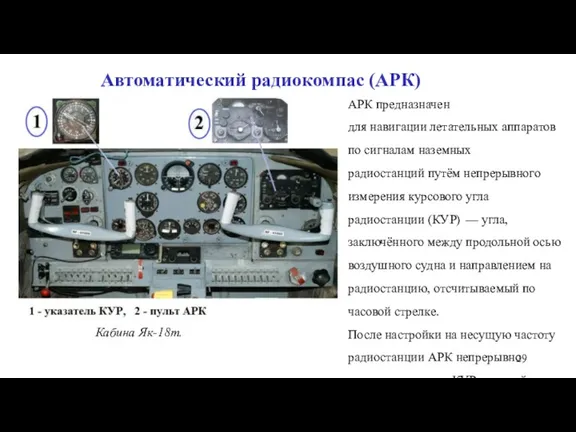
Автоматический радиокомпас (АРК)
Кабина Як-18т.
АРК предназначен для навигации летательных аппаратов по сигналам наземных радиостанций путём
Автоматический радиокомпас (АРК)
Кабина Як-18т.
АРК предназначен для навигации летательных аппаратов по сигналам наземных радиостанций путём

Автоматический радиокомпас
Автоматический радиокомпас
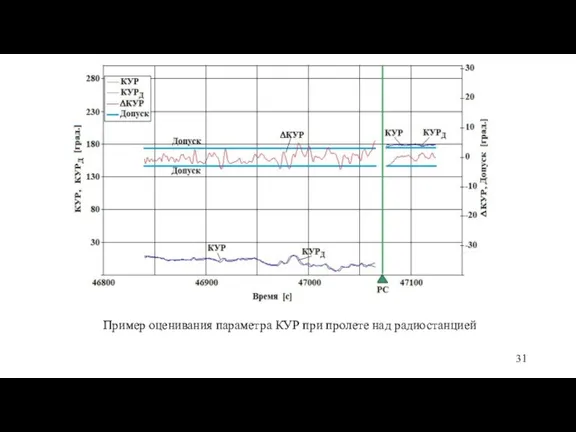
Пример оценивания параметра КУР при пролете над радиостанцией
Пример оценивания параметра КУР при пролете над радиостанцией
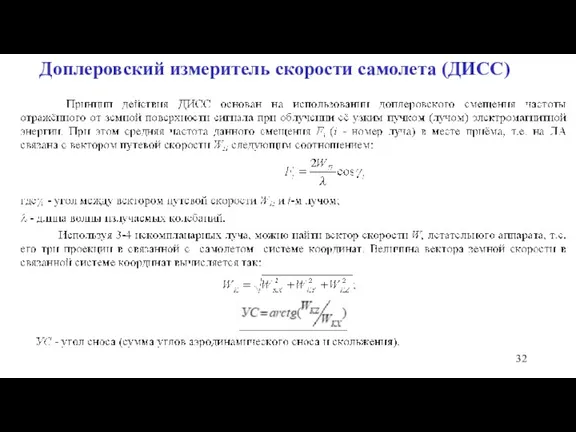
Доплеровский измеритель скорости самолета (ДИСС)
Доплеровский измеритель скорости самолета (ДИСС)
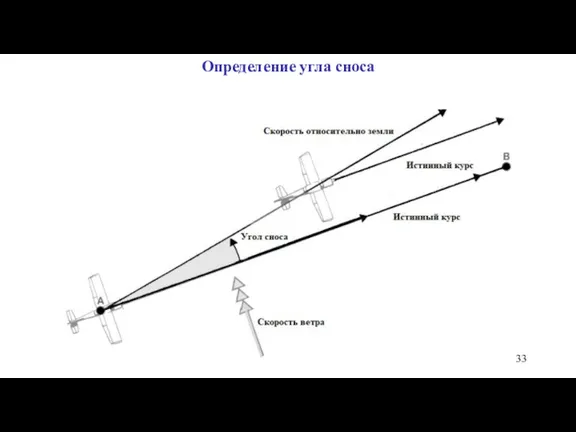
Определение угла сноса
Определение угла сноса
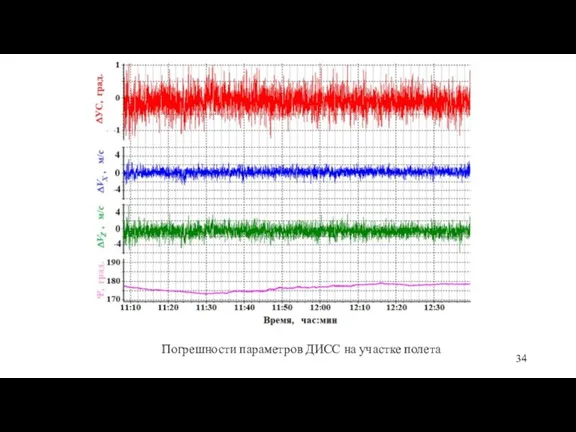
Погрешности параметров ДИСС на участке полета
Погрешности параметров ДИСС на участке полета
Радиовысотомер (РВ)
Принцип действия радиовысотомера основан на определении времени прохождения радиосигнала от
Радиовысотомер (РВ)
Принцип действия радиовысотомера основан на определении времени прохождения радиосигнала от
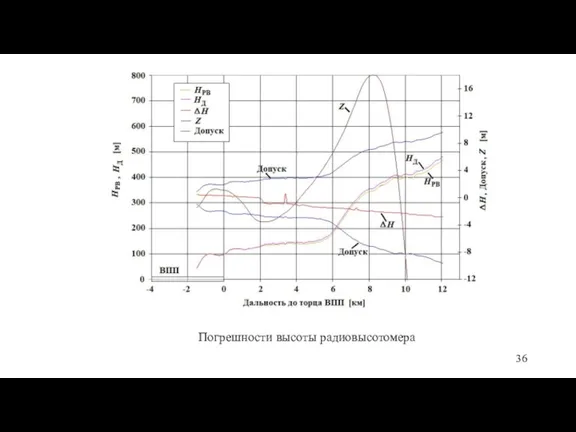
Погрешности высоты радиовысотомера
Погрешности высоты радиовысотомера
Радиотехнические системы дальней навигации
Определение положения ЛА с помощью станций РСДН
Радиотехнические системы дальней навигации
Определение положения ЛА с помощью станций РСДН
Примеры радиотехнических систем дальней навигации
OMEGA – фазовая радионавигационная система (США).
АЛЬФА
Примеры радиотехнических систем дальней навигации
OMEGA – фазовая радионавигационная система (США).
АЛЬФА
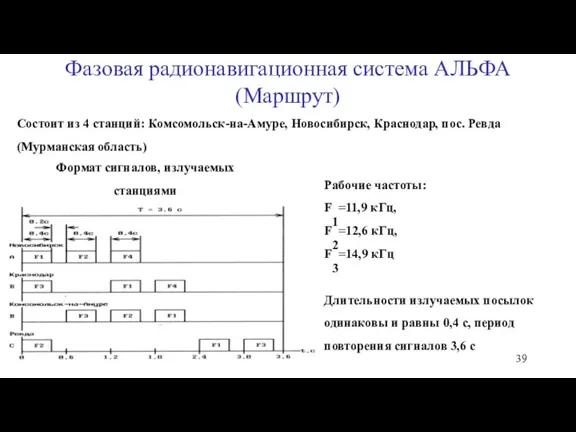
Фазовая радионавигационная система АЛЬФА (Маршрут)
Состоит из 4 станций: Комсомольск-на-Амуре,
Фазовая радионавигационная система АЛЬФА (Маршрут)
Состоит из 4 станций: Комсомольск-на-Амуре,

Расположение наземных станций и зона покрытия системы АЛЬФА
Расположение наземных станций и зона покрытия системы АЛЬФА

Расположение наземных станций и зона покрытия системы OMEGA
Расположение наземных станций и зона покрытия системы OMEGA
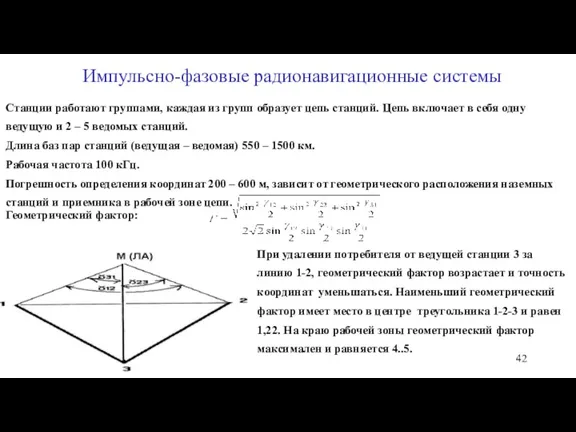
Импульсно-фазовые радионавигационные системы
Станции работают группами, каждая из групп образует цепь
Импульсно-фазовые радионавигационные системы
Станции работают группами, каждая из групп образует цепь
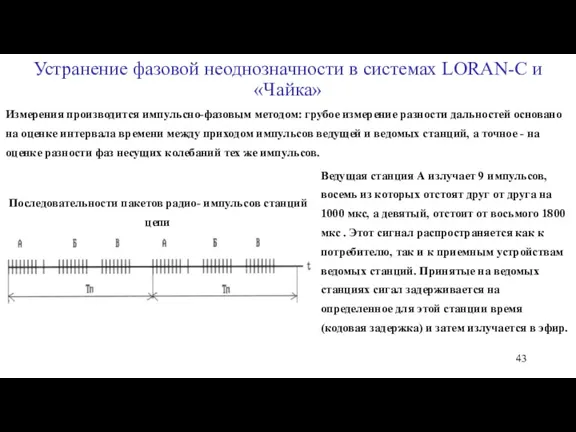
Устранение фазовой неоднозначности в системах LORAN-C и «Чайка»
Измерения производится импульсно-фазовым методом:
Устранение фазовой неоднозначности в системах LORAN-C и «Чайка»
Измерения производится импульсно-фазовым методом:

Зона покрытия систем LORAN-С и «Чайка»
Зона покрытия систем LORAN-С и «Чайка»
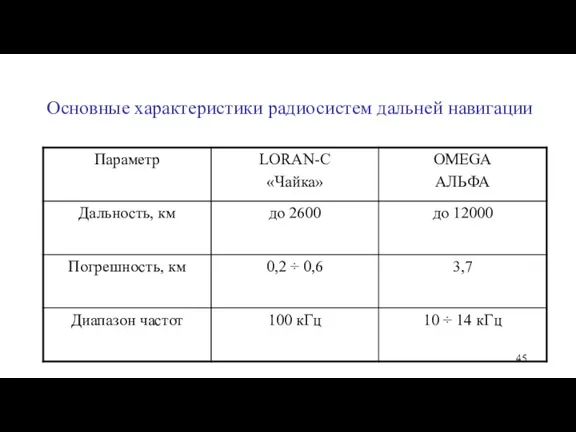
Основные характеристики радиосистем дальней навигации
Основные характеристики радиосистем дальней навигации
Основные причины погрешностей радиосистем дальней навигации
1. Помехи, поступающие на вход бортового
Основные причины погрешностей радиосистем дальней навигации
1. Помехи, поступающие на вход бортового
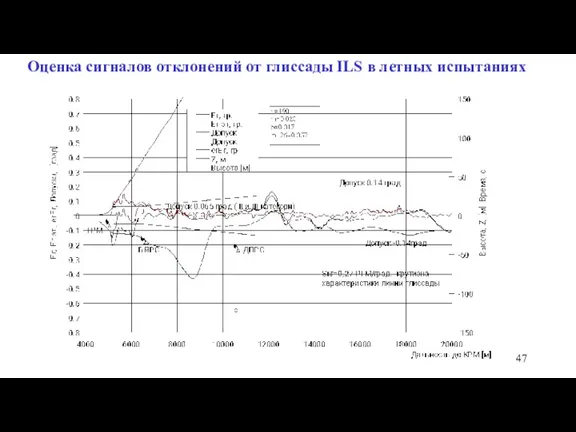
Оценка сигналов отклонений от глиссады ILS в летных испытаниях
Оценка сигналов отклонений от глиссады ILS в летных испытаниях
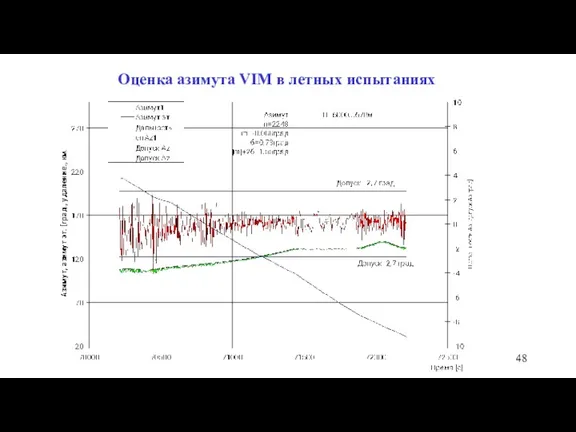
Оценка азимута VIM в летных испытаниях
Оценка азимута VIM в летных испытаниях
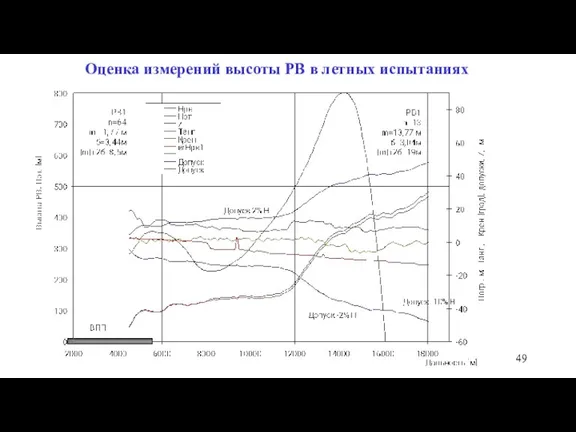
Оценка измерений высоты РВ в летных испытаниях
Оценка измерений высоты РВ в летных испытаниях
 Технологии беспроводной связи
Технологии беспроводной связи Слово. Повторение (2 класс)
Слово. Повторение (2 класс) Правила дорожного движения
Правила дорожного движения Энергетическая компания ПАО Газпром
Энергетическая компания ПАО Газпром Австралия. 11 класс
Австралия. 11 класс Роль информационных технологий в таможенном деле
Роль информационных технологий в таможенном деле Трансформаторы
Трансформаторы Скульптура – як вид мистецтва
Скульптура – як вид мистецтва Музыка утра
Музыка утра Геометрия в архитектуре
Геометрия в архитектуре Архитектура России конца ХІХ - начала ХХ века
Архитектура России конца ХІХ - начала ХХ века презентация к статье по исследовательской работе
презентация к статье по исследовательской работе Автоматизация звука /л/
Автоматизация звука /л/ Зародження обліку в період княжої і литовсько-польської доби
Зародження обліку в період княжої і литовсько-польської доби Памятка контроля по выполнению домашних заданий.
Памятка контроля по выполнению домашних заданий. Тип Членистоногие
Тип Членистоногие Методическая разработка к занятию- презентация Перелетные птицы
Методическая разработка к занятию- презентация Перелетные птицы Антарктида. Тест.
Антарктида. Тест. 20231021_prezentatsiya_microsoft_office_powerpoint_2
20231021_prezentatsiya_microsoft_office_powerpoint_2 Коммутационное оборудование
Коммутационное оборудование Термодинамические распределения
Термодинамические распределения Работа с графическим интерфейсом. Лекция №13
Работа с графическим интерфейсом. Лекция №13 Портфоліо Майстра виробничого навчання
Портфоліо Майстра виробничого навчання Конструктивные особенности конвейеров
Конструктивные особенности конвейеров Crude oil
Crude oil Советы себе 20-летнему
Советы себе 20-летнему Эдвард Григ, сюита Пер Гюнт
Эдвард Григ, сюита Пер Гюнт Социальные нормы и отклоняющееся поведение
Социальные нормы и отклоняющееся поведение