- Радионавигация

Содержание
- 2. Первые приборы для навигации: Компас - для определения направления на север; Астролябия и секстант - для
- 3. Радиопеленгация Передача сигналов точного времени Радиокомпас Радиомаяк Радиовысотомер Первые применения радио для навигации:
- 4. РАДИОНАВИГАЦИЯ - определение местоположения объекта (морских и воздушных судов, наземного транспорта и др.) с помощью радиотехнических
- 5. 1. Дальномерный метод: а) путем измерения времени задержки переизлученного ответа на посылаемый запрос; недостаток - мощные
- 6. 3. Угломерный метод путем определения направлений на разные опорные точки. Для радионавигации применяют также методы радиолокации
- 7. Радионавигационное оборудование аэропортов
- 8. Всенаправленный дальномерный радиомаяк принимает сигналы, излучаемые передатчиками самолетов и передает ответные сигналы, по времени задержки которых
- 12. Приводной радиомаяк (ПРМ) содержит два всенаправленных источника колебаний, промодулированных однобуквенным позывным азбуки Морзе. Несущая частота, выбирается
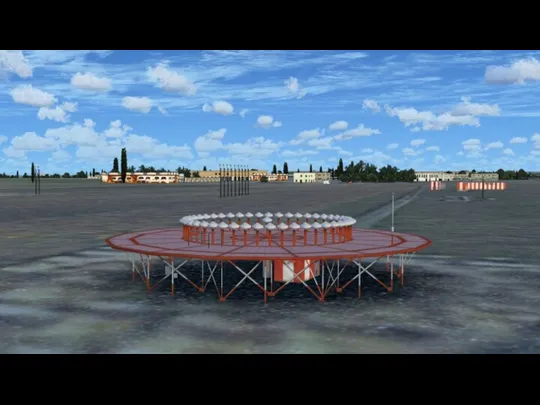
- 13. Приводной радиомаяк
- 14. Антенна приводного радиомаяка
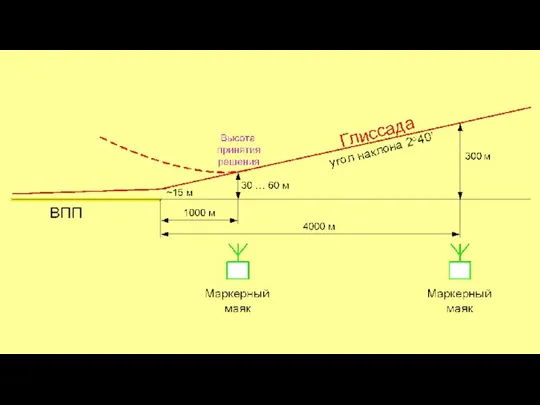
- 15. Радиомаяки системы инструментального захода на посадку
- 18. Курсовой радиомаяк (КРМ) формирует излучение вдоль осевой линии взлетно-посадочной полосы (ВПП) на одной из 40 частот
- 19. Курсовой радиомаяк
- 22. Глиссадный радиомаяк (ГРМ) формирует излучение на частоте 329 … 335 МГц, позволяющее бортовому навигационному оборудованию самолета
- 23. Глиссадные радиомаяки
- 24. Глиссадный радиомаяк в международном аэропорту Ганновер - Лангенхаген
- 25. Индикация сигналов глиссадного радиомаяка
- 26. Маркерные радиомаяки формируют излучение на частоте 75 МГц, узкая диаграмма направленности ориентирована вертикально. При прохождении самолета
- 27. Индикация сигналов маркерных радиомаяков
- 28. Допплеровский измеритель путевой скорости и угла сноса
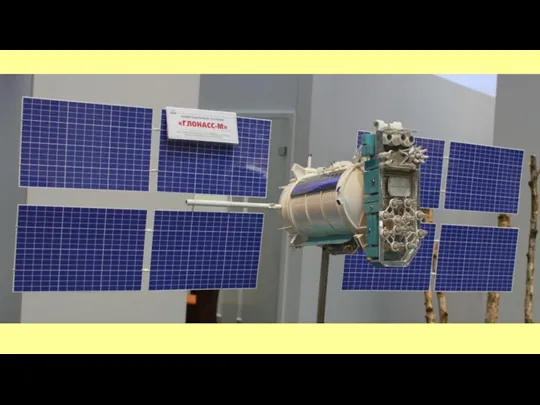
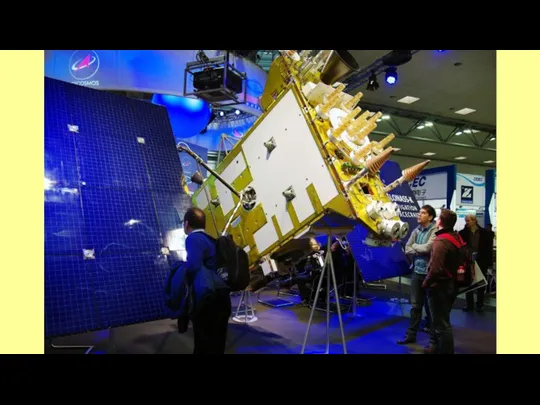
- 29. Глобальная навигационная спутниковая система (ГЛОНАСС) Начало проекта -1993 г. 24 спутника в трёх орбитальных плоскостях с
- 32. Спиральные антенны круговой поляризации
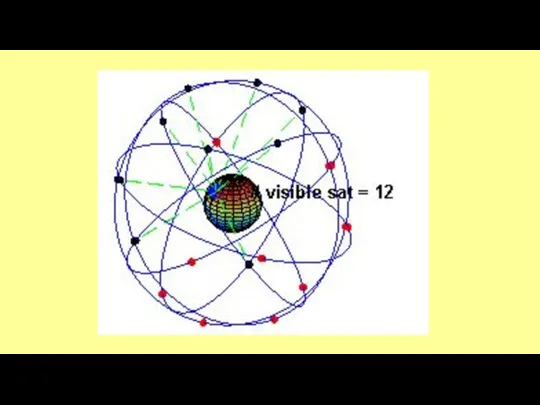
- 35. Система глобального позиционирования GPS Global Positioning System 24 спутника в четырёх орбитальных плоскостях с наклоном 55°
- 39. Скачать презентацию
Первые приборы для навигации:
Компас - для определения направления на
Первые приборы для навигации:
Компас - для определения направления на
Радиопеленгация
Передача сигналов точного времени
Радиокомпас
Радиомаяк
Радиовысотомер
Первые
Радиопеленгация
Передача сигналов точного времени
Радиокомпас
Радиомаяк
Радиовысотомер
Первые

РАДИОНАВИГАЦИЯ - определение местоположения объекта (морских и воздушных судов, наземного транспорта
РАДИОНАВИГАЦИЯ - определение местоположения объекта (морских и воздушных судов, наземного транспорта
1. Дальномерный метод:
а) путем измерения времени задержки переизлученного ответа на
1. Дальномерный метод:
а) путем измерения времени задержки переизлученного ответа на
3. Угломерный метод путем определения направлений на разные опорные точки.
Для радионавигации
3. Угломерный метод путем определения направлений на разные опорные точки.
Для радионавигации
Радионавигационное оборудование аэропортов
Радионавигационное оборудование аэропортов
Всенаправленный дальномерный радиомаяк принимает сигналы, излучаемые передатчиками самолетов и передает ответные
Всенаправленный дальномерный радиомаяк принимает сигналы, излучаемые передатчиками самолетов и передает ответные


Приводной радиомаяк (ПРМ) содержит два всенаправленных источника колебаний, промодулированных однобуквенным позывным
Приводной радиомаяк (ПРМ) содержит два всенаправленных источника колебаний, промодулированных однобуквенным позывным

Приводной радиомаяк
Приводной радиомаяк
Антенна приводного радиомаяка
Антенна приводного радиомаяка
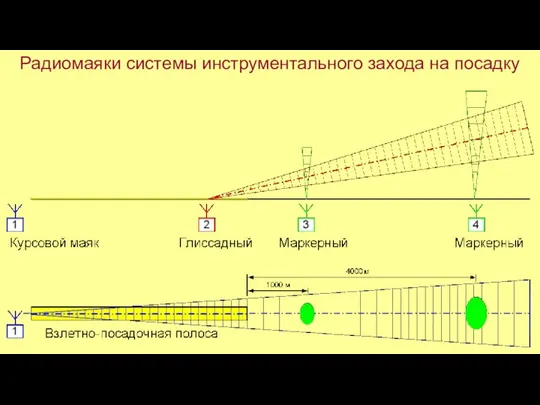
Радиомаяки системы инструментального захода на посадку
Радиомаяки системы инструментального захода на посадку
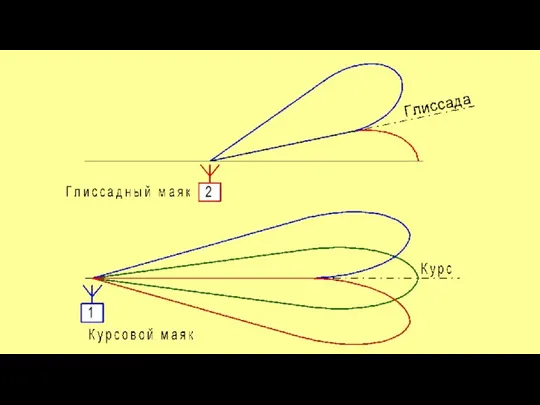

Курсовой радиомаяк (КРМ) формирует излучение вдоль осевой линии взлетно-посадочной полосы (ВПП)
Курсовой радиомаяк (КРМ) формирует излучение вдоль осевой линии взлетно-посадочной полосы (ВПП)

Курсовой радиомаяк
Курсовой радиомаяк


Глиссадный радиомаяк (ГРМ) формирует излучение на частоте 329 … 335 МГц,
Глиссадный радиомаяк (ГРМ) формирует излучение на частоте 329 … 335 МГц,

Глиссадные радиомаяки
Глиссадные радиомаяки
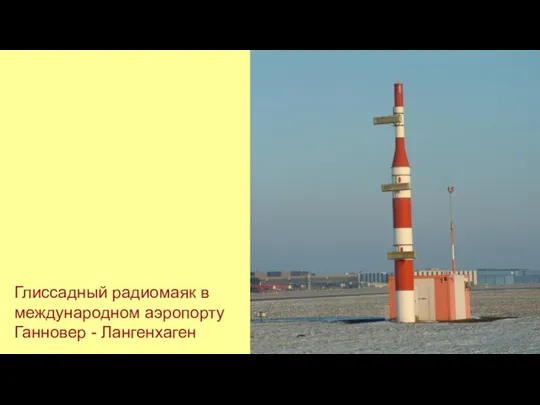
Глиссадный радиомаяк в международном аэропорту Ганновер - Лангенхаген
Глиссадный радиомаяк в международном аэропорту Ганновер - Лангенхаген
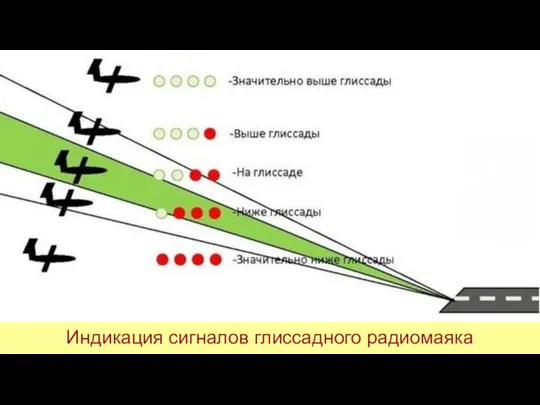
Индикация сигналов глиссадного радиомаяка
Индикация сигналов глиссадного радиомаяка

Маркерные радиомаяки формируют излучение на частоте 75 МГц, узкая диаграмма направленности
Маркерные радиомаяки формируют излучение на частоте 75 МГц, узкая диаграмма направленности

Индикация сигналов маркерных радиомаяков
Индикация сигналов маркерных радиомаяков

Допплеровский измеритель путевой скорости и угла сноса
Допплеровский измеритель путевой скорости и угла сноса
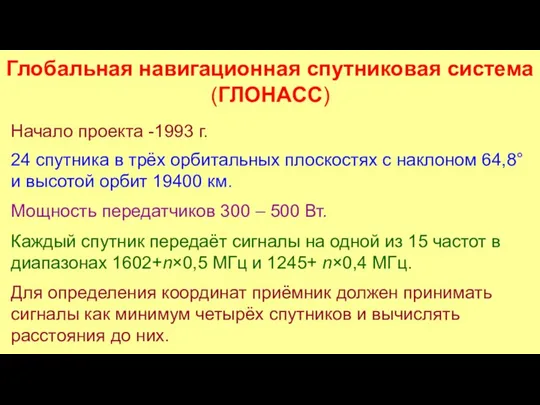
Глобальная навигационная спутниковая система (ГЛОНАСС)
Начало проекта -1993 г.
24 спутника в
Глобальная навигационная спутниковая система (ГЛОНАСС)
Начало проекта -1993 г.
24 спутника в
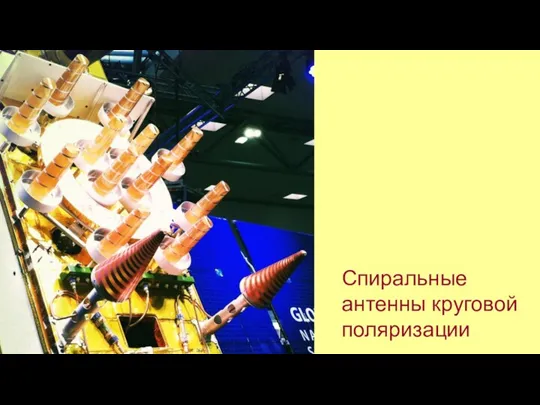
Спиральные антенны круговой поляризации
Спиральные антенны круговой поляризации


Система глобального позиционирования GPS Global Positioning System
24 спутника в четырёх
Система глобального позиционирования GPS Global Positioning System
24 спутника в четырёх

 Сильвестр Ольшевский, архиепископ Омский
Сильвестр Ольшевский, архиепископ Омский Урок технологии. Прихватка
Урок технологии. Прихватка Структура рекламного текста
Структура рекламного текста Жизнь на материке Африка.
Жизнь на материке Африка. 26 апреля – День ликвидаторов Чернобыльской Аварии
26 апреля – День ликвидаторов Чернобыльской Аварии Биохимические сдвиги в организме при мышечной работе
Биохимические сдвиги в организме при мышечной работе Социальная защита и социальное обеспечение
Социальная защита и социальное обеспечение Бином Ньютона
Бином Ньютона Реконструкция ПС 110 кВ №156 с увеличением трансформаторной мощности ПАО Ленэнерго
Реконструкция ПС 110 кВ №156 с увеличением трансформаторной мощности ПАО Ленэнерго Презентация к занятию по риторике № 11 Средства выразительности устной речи (повторение и обобщение) (2 класс)
Презентация к занятию по риторике № 11 Средства выразительности устной речи (повторение и обобщение) (2 класс) живые клетки. методы их изучения
живые клетки. методы их изучения Архитектура Казани
Архитектура Казани Колорит и тип фигуры
Колорит и тип фигуры Prezentatsia
Prezentatsia Государственный Эрмитаж
Государственный Эрмитаж Картотетка физкультминуток для дошкольников
Картотетка физкультминуток для дошкольников Senstone's overview
Senstone's overview Проектная деятельность в старшей группе ДОУ на тему Весёлый огород на подоконнике
Проектная деятельность в старшей группе ДОУ на тему Весёлый огород на подоконнике Спорт в вузах России
Спорт в вузах России Презентация урока-мастерской Железо 9 класс
Презентация урока-мастерской Железо 9 класс Групповой творческий краткосрочный проект: Зимнее окно
Групповой творческий краткосрочный проект: Зимнее окно Земля и ее внутреннее строение.
Земля и ее внутреннее строение. немного обо мне
немного обо мне Презентация к классному часу по теме Что такое толерантность?
Презентация к классному часу по теме Что такое толерантность? презентация мини -музей песка
презентация мини -музей песка Информационные технологии на транспорте
Информационные технологии на транспорте Электронные физминутки для глаз
Электронные физминутки для глаз Детский сад моей мечты
Детский сад моей мечты