- Радиотехнические системы

Содержание
- 2. РЛС И ИХ КЛАССИФИКАЦИЯ Локация (location происходит от латинского locatio - размещение) — определение размещения, местоположения
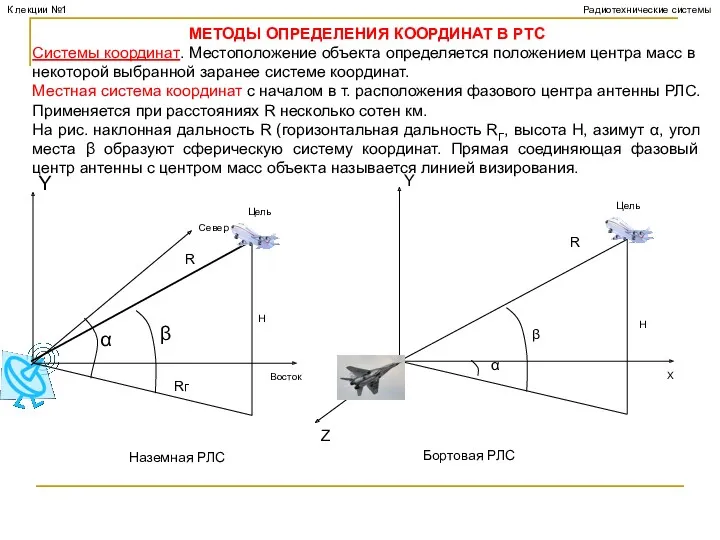
- 3. Радиотехнические системы К лекции №1 МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ В РТС Системы координат. Местоположение объекта определяется положением
- 4. Систе́ма координа́т — комплекс определений, реализующий метод координат, то есть способ определять положение и перемещение точки
- 5. Сферическая система координат Сферическими координатами объекта наблюдения (объект находится в точке М) являются: R – радиус-вектор
- 6. РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ Они решают часть задачи местоопределения объектов, т.е. определяют наклонную дальность. Вводятся условия
- 7. Функциональная схема импульсного измерителя дальности
- 10. - длительность зондирующего импульса, - период повторения зондирующих импульсов, - скважность последовательности зондирующих импульсов.
- 11. Достоинства импульсных дальномеров: 1. возможность построения РЛС с использованием одной антенны; 2. простота отсчета дальности; 3.
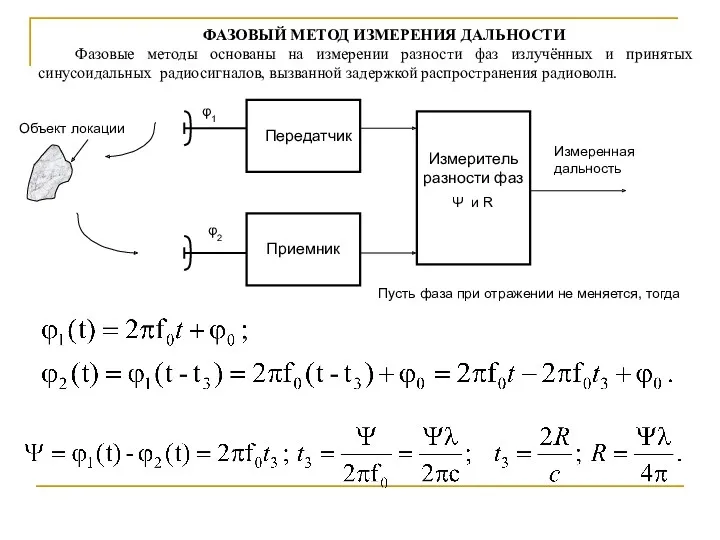
- 12. ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ Фазовые методы основаны на измерении разности фаз излучённых и принятых синусоидальных радиосигналов,
- 13. Достоинство фазового метода состоит в простоте структуры измерительного устройства (но при двух антеннах). Недостатки фазового метода:
- 14. ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ Основан на измерении разности частот излучённых и принятых частотно-модулированных радиосигналов, вызванной задержкой
- 15. fб(t) Функции изменения частоты излучаемого и принимаемого сигналов и разностной частоты от времени. Изображены не сигналы,
- 17. Мгновенное значение частоты биений непостоянно, т.к. период модуляции Т
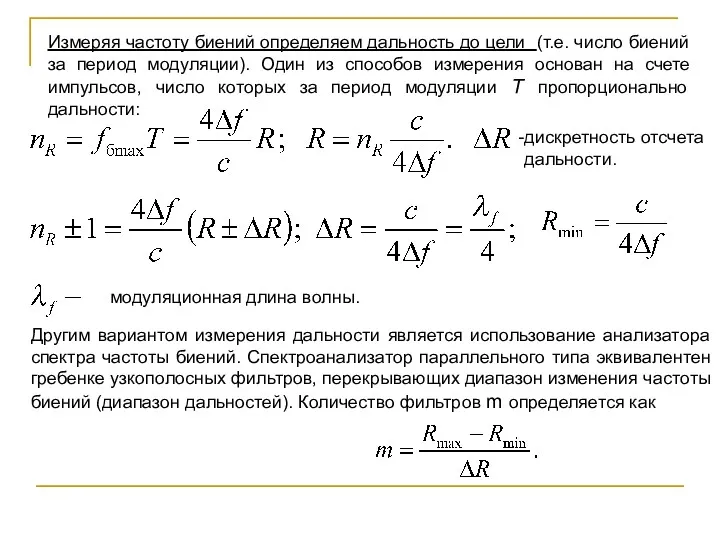
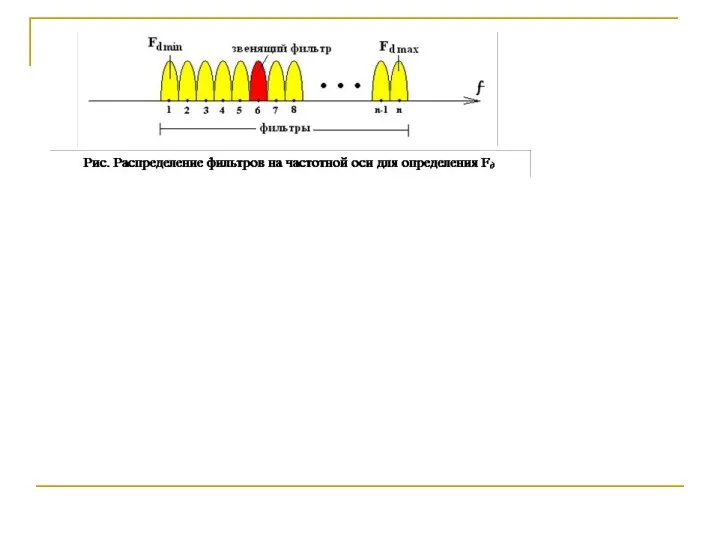
- 18. Измеряя частоту биений определяем дальность до цели (т.е. число биений за период модуляции). Один из способов
- 20. Спектр частоты биений дискретный и по этой причине и отсчеты частоты носят дискретный характер. Частотный метод
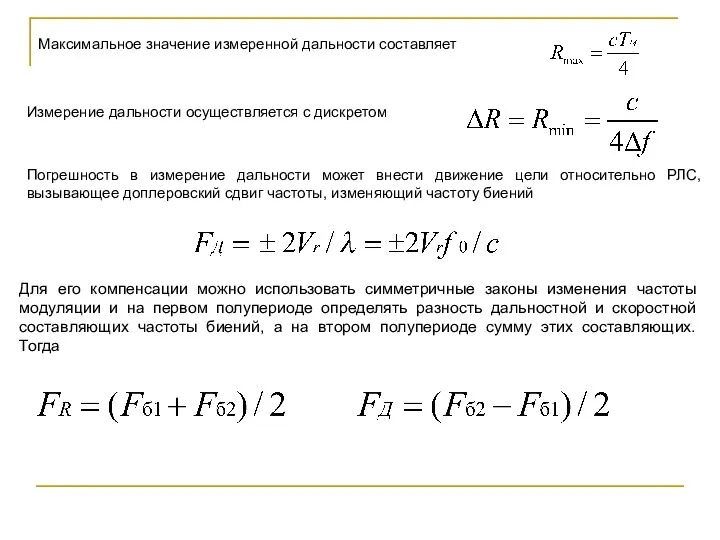
- 21. Максимальное значение измеренной дальности составляет Измерение дальности осуществляется с дискретом Погрешность в измерение дальности может внести
- 22. СОВМЕСТНОЕ ИЗМЕРЕНИЕ ДАЛЬНОСТИ И СКОРОСТИ ОБЪЕКТОВ ЧАСТОТНЫМ МЕТОДОМ Из формулы можно определить скорость цели При или
- 23. Как правило обеспечивают тогда или Первое условие обеспечивает измерение дальности, второе - скорости
- 24. Методы измерения угловых координат Пеленгация (peling-угол) - определение направления на объект (определение угловых координат), отсчитываемое от
- 25. Амплитудные методы используют направленные свойства антенн Применяются методы: максимума; минимума; сравнения; равносигнальный. При пеленгации по методу
- 28. Амплитуда сигналов при сканировании зависит от углового положения антенны по отношению к цели. При вращении антенны
- 29. Пеленгация с использованием оценки производной огибающей пачки отраженных импульсов Момент совпадения максимума пачки отраженных импульсов с
- 30. Схема пеленгатора по методу максимума с использованием производной огибающей пачки
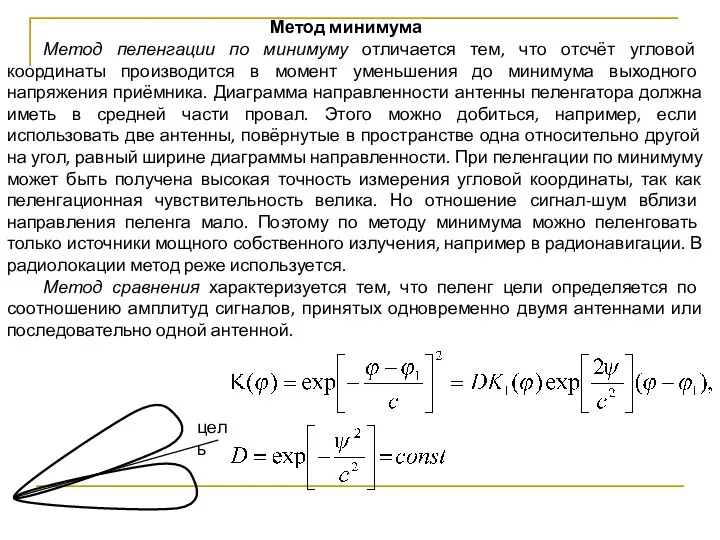
- 31. цель Метод минимума Метод пеленгации по минимуму отличается тем, что отсчёт угловой координаты производится в момент
- 32. Вариантом метода сравнения является равносигнальный метод пеленгации. Он также основан на сравнении амплитуд сигналов, принимаемых двумя
- 33. Ошибка (СКО) определения фазы где ζ – разность фаз Фазовый метод Фазовые методы основаны на измерении
- 34. Многоканальные РП. Суммарно-разностный алгоритм радиопеленгации В качестве суммарно-разностного устройства используется волноводно-кольцевой мост. Сигнал разностного канала определяет
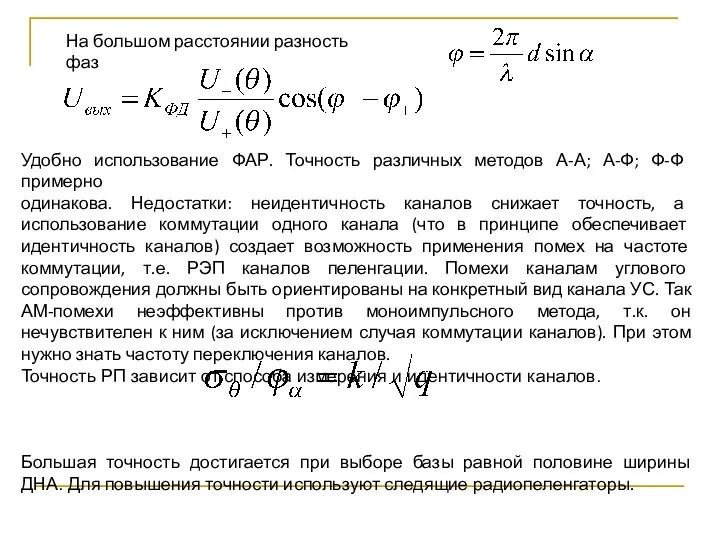
- 35. На большом расстоянии разность фаз Удобно использование ФАР. Точность различных методов А-А; А-Ф; Ф-Ф примерно одинакова.
- 36. УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ Дальность действия РЛС в свободном пространстве Дальностью действия радиолокационной станции называется наибольшее
- 37. На входе приемника активной РЛС пороговая мощность сигнала при обнаружении: >qckp, Sa =S2 – активная площадь
- 39. Скачать презентацию
РЛС И ИХ КЛАССИФИКАЦИЯ
Локация (location происходит от латинского locatio - размещение)
РЛС И ИХ КЛАССИФИКАЦИЯ
Локация (location происходит от латинского locatio - размещение)
Радиотехнические системы
К лекции №1
МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ В РТС
Системы координат. Местоположение объекта
Радиотехнические системы
К лекции №1
МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ В РТС
Системы координат. Местоположение объекта
Систе́ма координа́т — комплекс определений, реализующий метод координат, то есть способ
Систе́ма координа́т — комплекс определений, реализующий метод координат, то есть способ
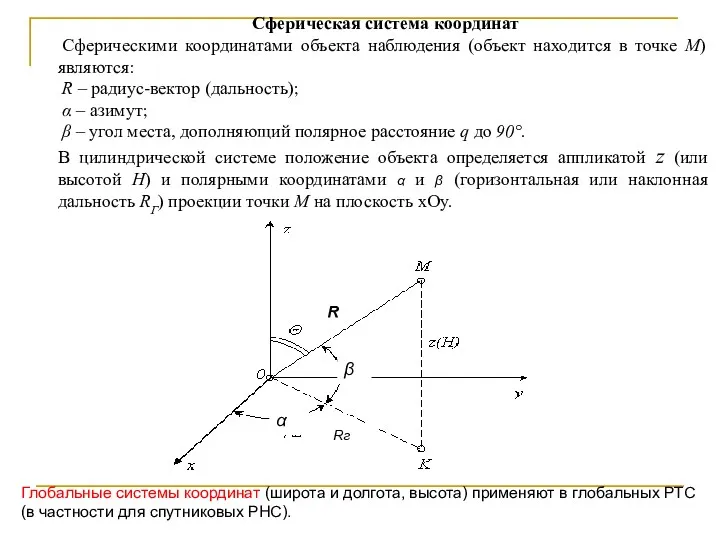
Сферическая система координат
Сферическими координатами объекта наблюдения (объект находится в точке М)
Сферическая система координат
Сферическими координатами объекта наблюдения (объект находится в точке М)
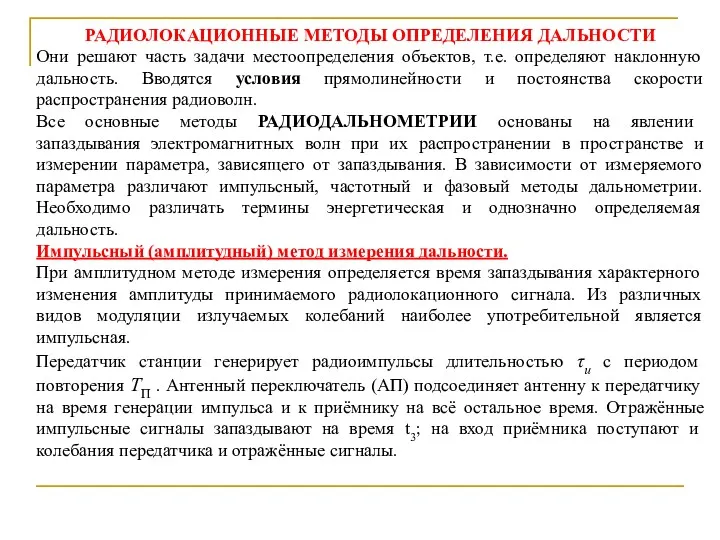
РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
Они решают часть задачи местоопределения объектов, т.е. определяют
РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
Они решают часть задачи местоопределения объектов, т.е. определяют
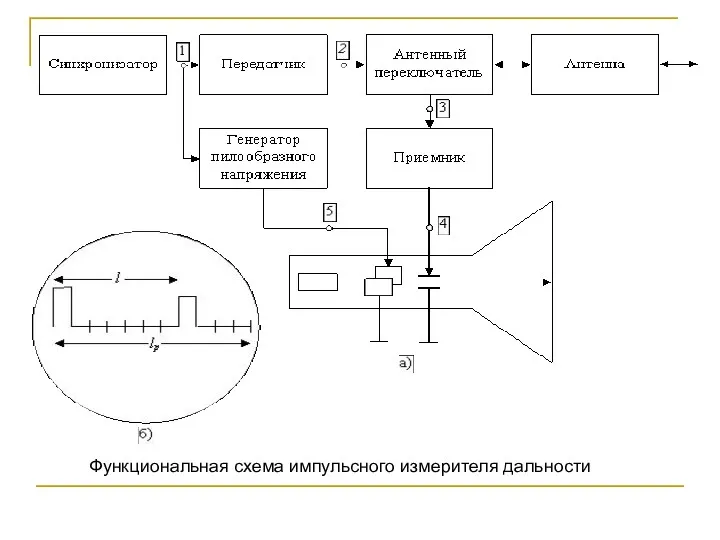
Функциональная схема импульсного измерителя дальности
Функциональная схема импульсного измерителя дальности
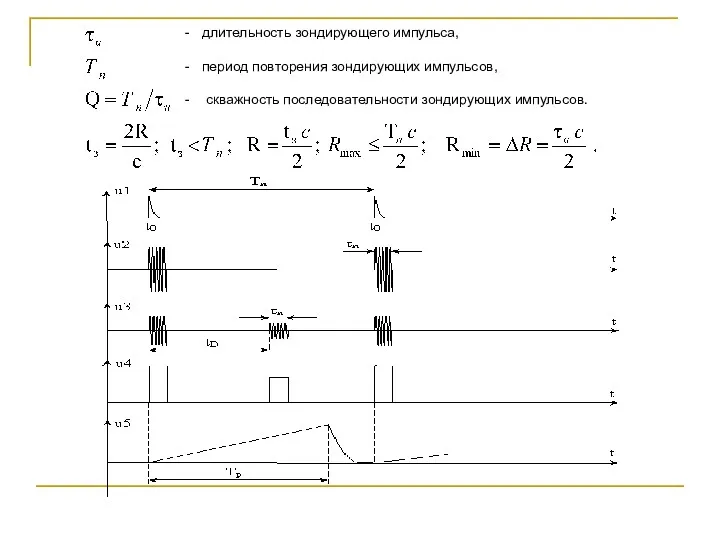
- длительность зондирующего импульса,
- период повторения зондирующих импульсов,
- скважность последовательности зондирующих
- длительность зондирующего импульса,
- период повторения зондирующих импульсов,
- скважность последовательности зондирующих
Достоинства импульсных дальномеров:
1. возможность построения РЛС с использованием одной антенны;
2. простота отсчета
Достоинства импульсных дальномеров:
1. возможность построения РЛС с использованием одной антенны;
2. простота отсчета
ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Фазовые методы основаны на измерении разности фаз излучённых и
ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Фазовые методы основаны на измерении разности фаз излучённых и
Достоинство фазового метода состоит в простоте структуры измерительного устройства (но при
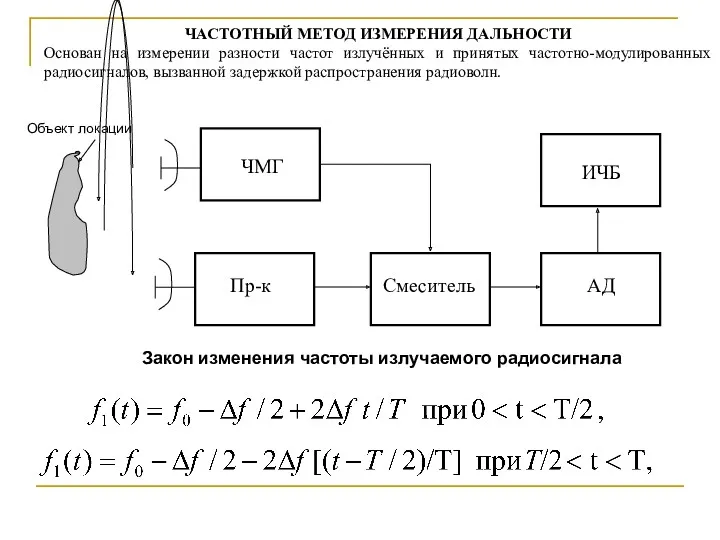
ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Основан на измерении разности частот излучённых и принятых
ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Основан на измерении разности частот излучённых и принятых
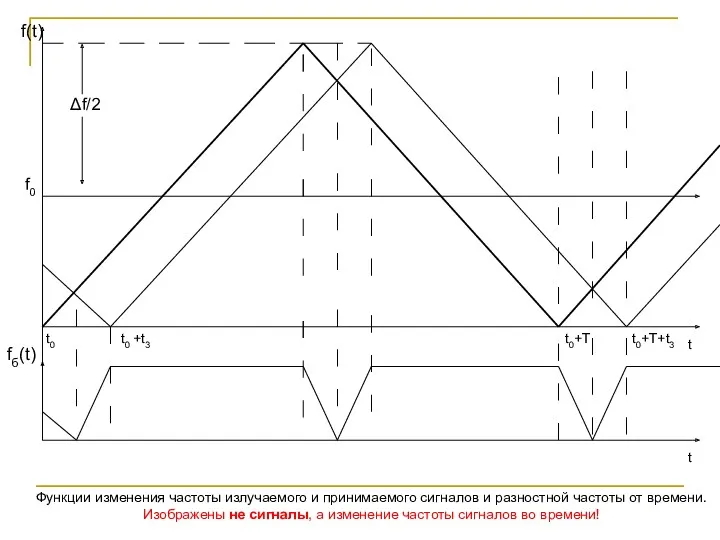
fб(t)
Функции изменения частоты излучаемого и принимаемого сигналов и разностной частоты от
fб(t)
Функции изменения частоты излучаемого и принимаемого сигналов и разностной частоты от
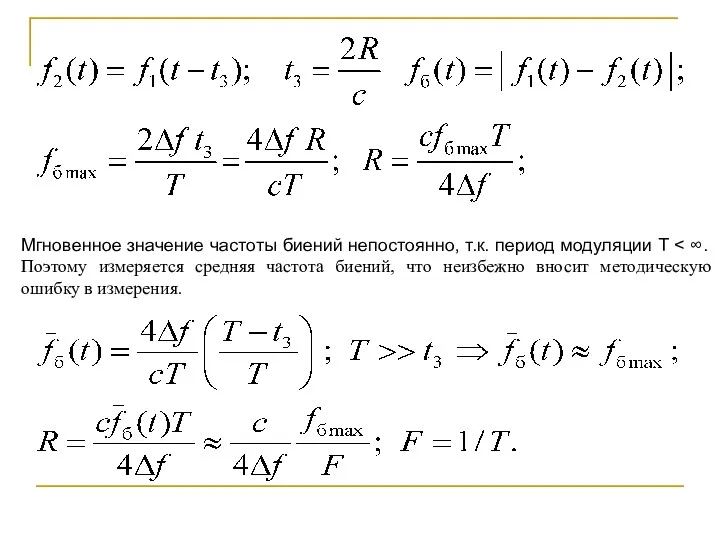
Мгновенное значение частоты биений непостоянно, т.к. период модуляции Т < ∞.
Мгновенное значение частоты биений непостоянно, т.к. период модуляции Т < ∞.
Измеряя частоту биений определяем дальность до цели (т.е. число биений за
Измеряя частоту биений определяем дальность до цели (т.е. число биений за
Спектр частоты биений дискретный и по этой причине и отсчеты частоты
Спектр частоты биений дискретный и по этой причине и отсчеты частоты
Максимальное значение измеренной дальности составляет
Измерение дальности осуществляется с дискретом
Погрешность
Максимальное значение измеренной дальности составляет
Измерение дальности осуществляется с дискретом
Погрешность
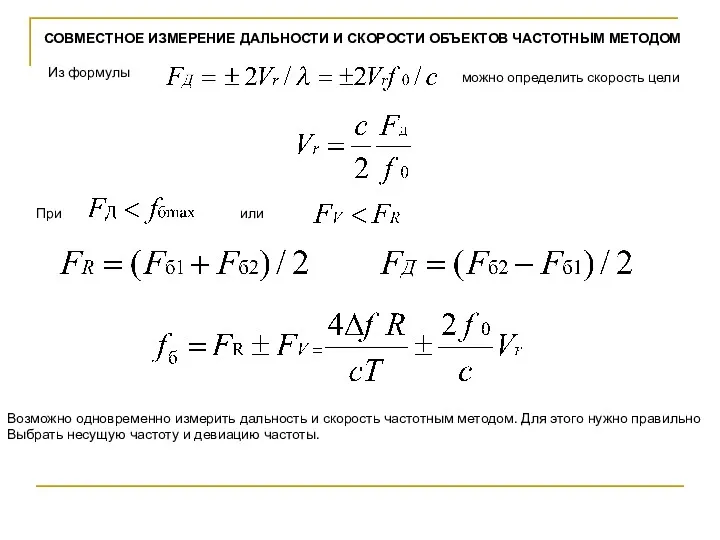
СОВМЕСТНОЕ ИЗМЕРЕНИЕ ДАЛЬНОСТИ И СКОРОСТИ ОБЪЕКТОВ ЧАСТОТНЫМ МЕТОДОМ
Из формулы
можно определить скорость
СОВМЕСТНОЕ ИЗМЕРЕНИЕ ДАЛЬНОСТИ И СКОРОСТИ ОБЪЕКТОВ ЧАСТОТНЫМ МЕТОДОМ
Из формулы
можно определить скорость
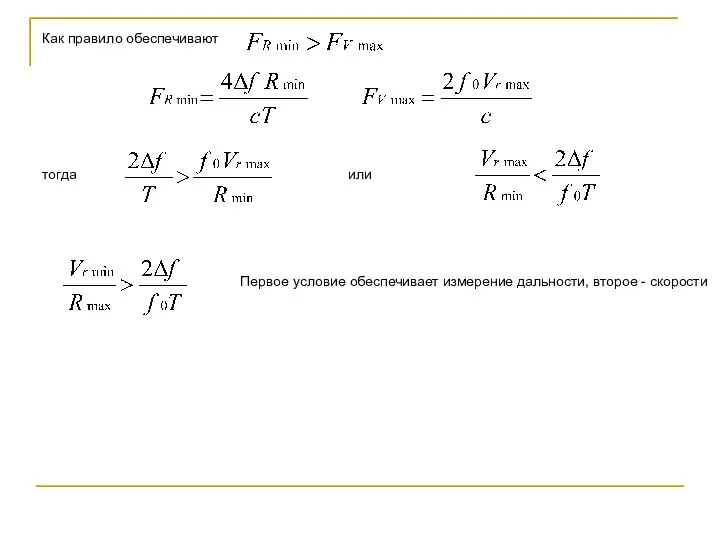
Как правило обеспечивают
тогда
или
Первое условие обеспечивает измерение дальности, второе - скорости
Как правило обеспечивают
тогда
или
Первое условие обеспечивает измерение дальности, второе - скорости
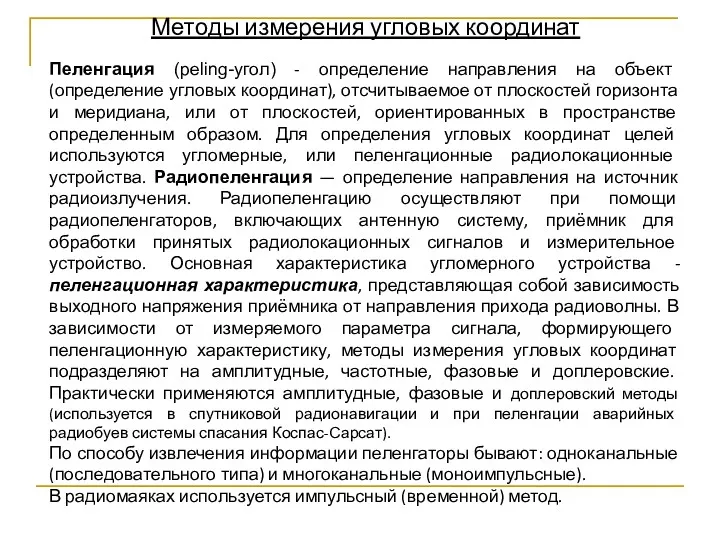
Методы измерения угловых координат
Пеленгация (peling-угол) - определение направления на объект (определение
Методы измерения угловых координат
Пеленгация (peling-угол) - определение направления на объект (определение
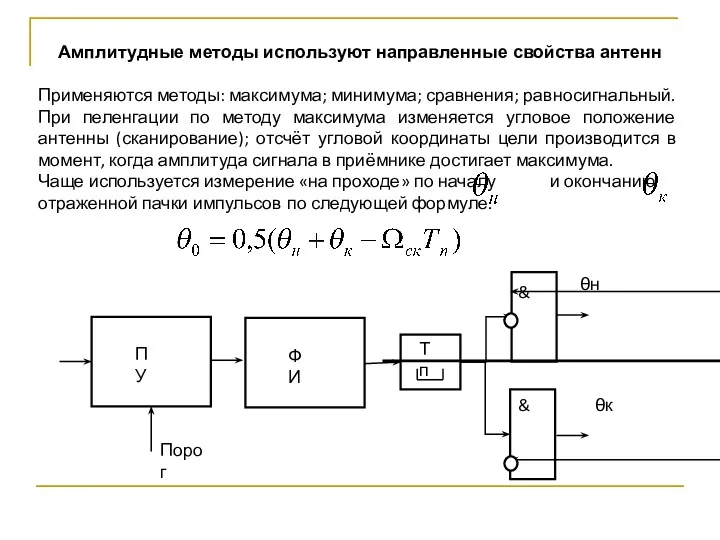
Амплитудные методы используют направленные свойства антенн
Применяются методы: максимума; минимума; сравнения; равносигнальный.
При
Амплитудные методы используют направленные свойства антенн
Применяются методы: максимума; минимума; сравнения; равносигнальный.
При
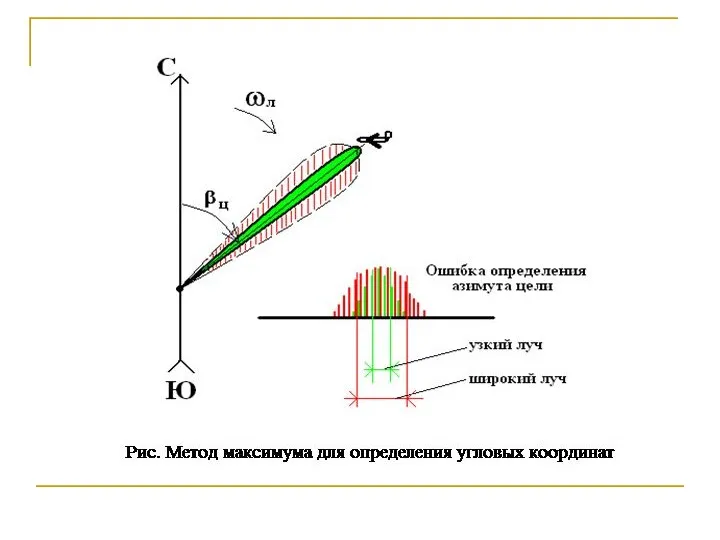
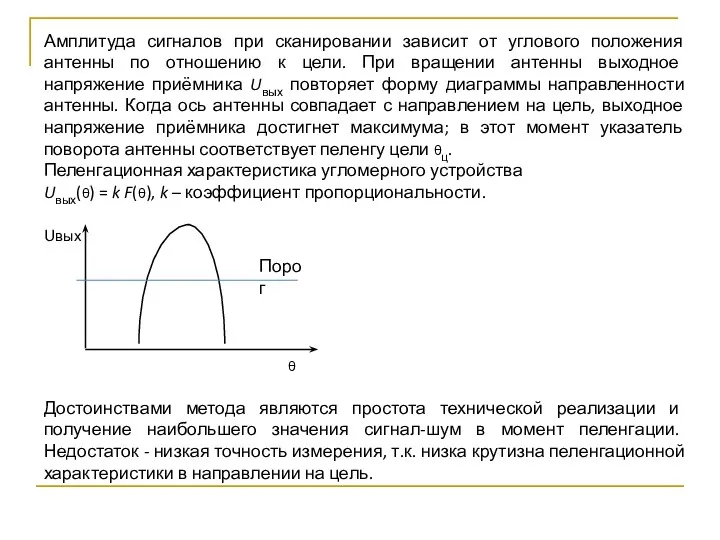
Амплитуда сигналов при сканировании зависит от углового положения антенны по отношению
Амплитуда сигналов при сканировании зависит от углового положения антенны по отношению
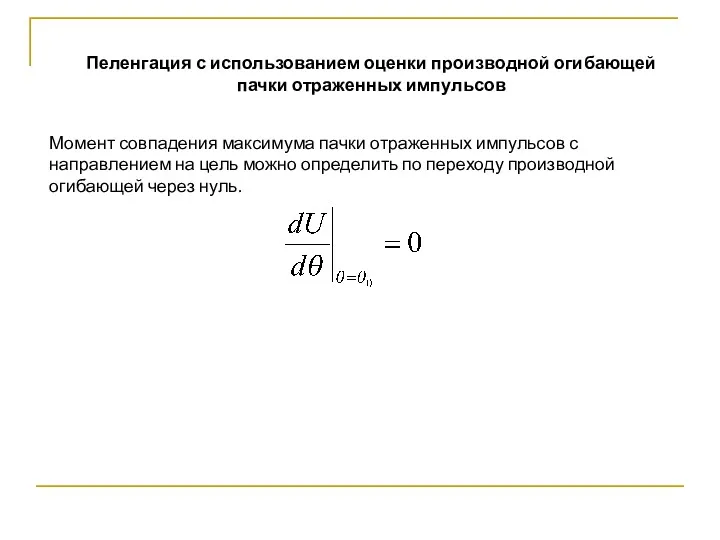
Пеленгация с использованием оценки производной огибающей
пачки отраженных импульсов
Момент совпадения максимума
Пеленгация с использованием оценки производной огибающей
пачки отраженных импульсов
Момент совпадения максимума
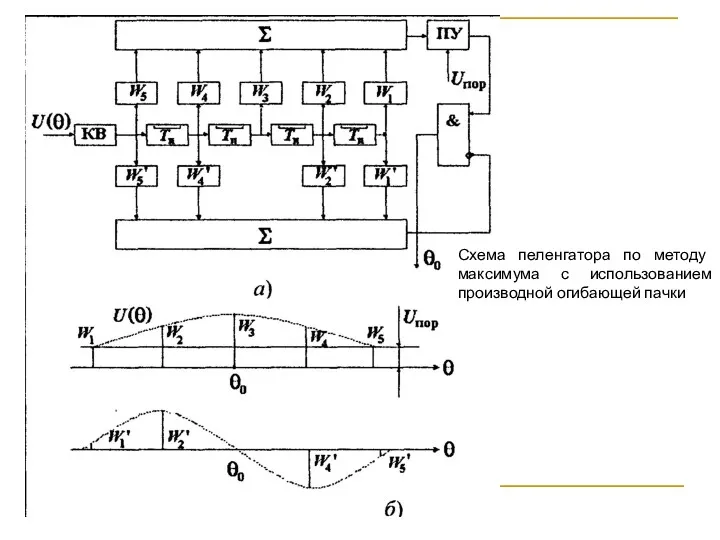
Схема пеленгатора по методу максимума с использованием производной огибающей пачки
Схема пеленгатора по методу максимума с использованием производной огибающей пачки
цель
Метод минимума
Метод пеленгации по минимуму отличается тем, что отсчёт
цель
Метод минимума
Метод пеленгации по минимуму отличается тем, что отсчёт
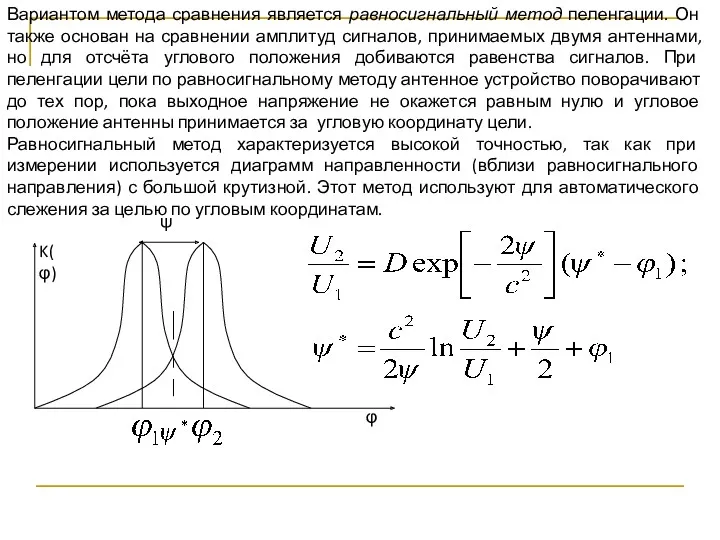
Вариантом метода сравнения является равносигнальный метод пеленгации. Он также основан на
Вариантом метода сравнения является равносигнальный метод пеленгации. Он также основан на
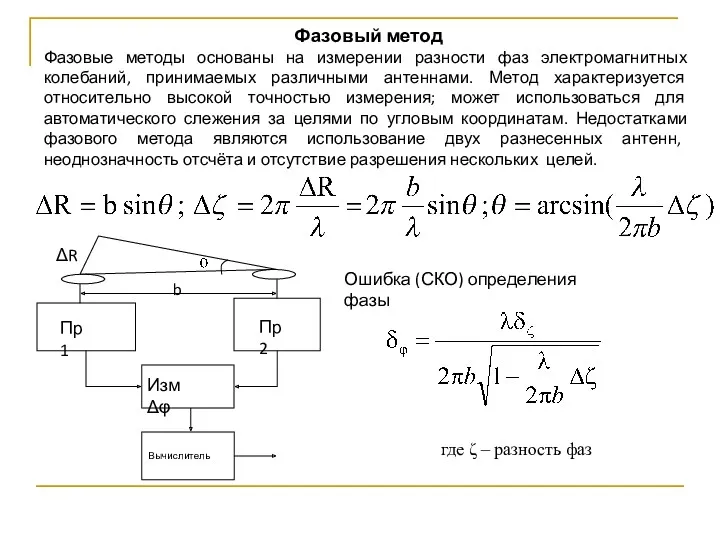
Ошибка (СКО) определения фазы
где ζ – разность фаз
Фазовый метод
Фазовые методы основаны
Ошибка (СКО) определения фазы
где ζ – разность фаз
Фазовый метод
Фазовые методы основаны
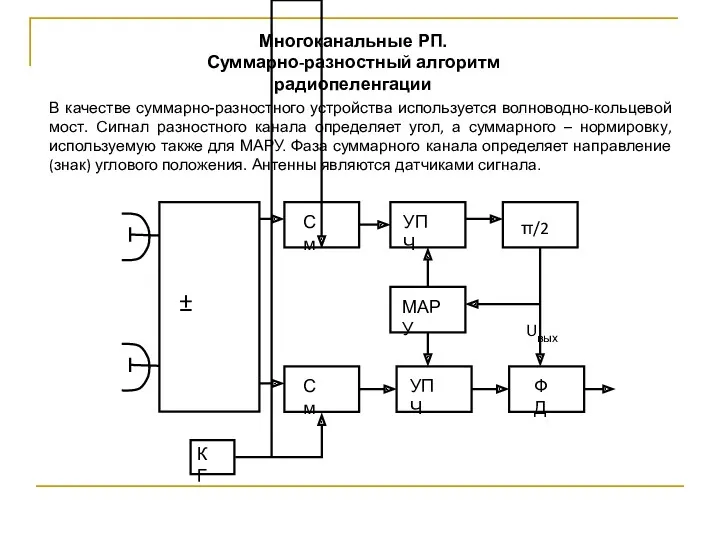
Многоканальные РП.
Суммарно-разностный алгоритм радиопеленгации
В качестве суммарно-разностного устройства используется волноводно-кольцевой мост. Сигнал
Многоканальные РП.
Суммарно-разностный алгоритм радиопеленгации
В качестве суммарно-разностного устройства используется волноводно-кольцевой мост. Сигнал
На большом расстоянии разность фаз
Удобно использование ФАР. Точность различных методов А-А;
На большом расстоянии разность фаз
Удобно использование ФАР. Точность различных методов А-А;
УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ
Дальность действия РЛС в свободном пространстве
Дальностью действия радиолокационной
УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ
Дальность действия РЛС в свободном пространстве
Дальностью действия радиолокационной
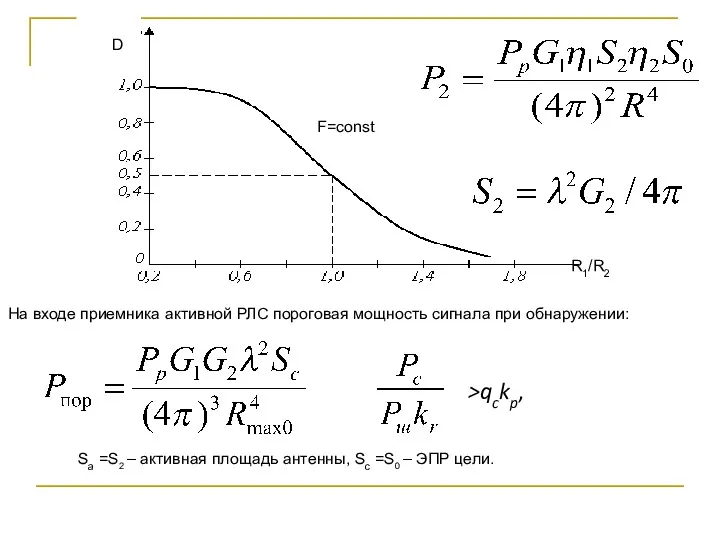
На входе приемника активной РЛС пороговая мощность сигнала при обнаружении:
>qckp,
Sa =S2
На входе приемника активной РЛС пороговая мощность сигнала при обнаружении:
>qckp,
Sa =S2
 Интеллектуально-развлекательная викторина для учащихся начальной школы
Интеллектуально-развлекательная викторина для учащихся начальной школы Рельеф Южной Америки
Рельеф Южной Америки образовательная программа студии Акварелька
образовательная программа студии Акварелька пример призентации
пример призентации Енот-полоскун
Енот-полоскун Технология обработки древесины
Технология обработки древесины Достопримечательности Калининграда
Достопримечательности Калининграда Центрифуга
Центрифуга 09Презентация Традиции и воспитание казаков -2 часть
09Презентация Традиции и воспитание казаков -2 часть презентация Оксиды
презентация Оксиды Диагностика изучения личности учащихся
Диагностика изучения личности учащихся можжевельник
можжевельник Предотвращение суицидов и самоповреждающего поведения: эффективные методы помощи
Предотвращение суицидов и самоповреждающего поведения: эффективные методы помощи Подготовительная работа над научной статьей. Создание условий работы
Подготовительная работа над научной статьей. Создание условий работы презентация мини-музея
презентация мини-музея Инструкция по заполнению Личного кабинета (ЛК) студента
Инструкция по заполнению Личного кабинета (ЛК) студента Тестирование по теме: Древняя Греция
Тестирование по теме: Древняя Греция Редактируемая карта мира
Редактируемая карта мира Игра атмосфера
Игра атмосфера Подпрограмма Домоводство
Подпрограмма Домоводство Производство классического хлебного кваса
Производство классического хлебного кваса Проект электрической части ТЭЦ-400 МВт в г. Петрозаводск
Проект электрической части ТЭЦ-400 МВт в г. Петрозаводск Детский сад присмотра и оздоровления
Детский сад присмотра и оздоровления Функция. Прямая пропорциональность
Функция. Прямая пропорциональность Социально-демографические процессы в Казахстане за годы независимости
Социально-демографические процессы в Казахстане за годы независимости Церковная реформа. Положение традиционных конфессий
Церковная реформа. Положение традиционных конфессий Презентация к внеурочному занятию Учимся составлять загадки
Презентация к внеурочному занятию Учимся составлять загадки Крым – старая новая территория России
Крым – старая новая территория России