Разработка системы управления движущегося объекта на основе микроконтроллерного блока с использованием ультразвукового датчика презентация
- Разработка системы управления движущегося объекта на основе микроконтроллерного блока с использованием ультразвукового датчика

Содержание
- 2. Необходимость использования контроллеров назрела в начале 1960-ых. Когда промышленность начала предъявлять высокие требования к эффективному использованию
- 3. Основной задачей насоса подкачки поддерживать уровень воды в определённой ёмкости. При начале работы включается тумблер «Вкл»,
- 4. Программа управления насосом подкачки должна иметь ПЛК (Программируемый Логический Контроллер). Система запуска должна осуществляться при нажатий
- 5. Автоматизация насоса подкачки позволяет добиться бесперебойного и надежного водоснабжения, сократить эксплуатационные расходы и затраты труда, а
- 6. Для разработки данной схемы исходя из задания дипломного проекта выбираем следующие элементы: 1. Пульт управления с
- 7. Контроллер серии "Альфа-2" без затруднений может быть использован во всех местах, где необходимо выполнение функций управления,
- 8. Для запуска системы включаем тумблер, подключенный к контакту I01. В зависимости от состояния датчика, исходящий из
- 9. Выбор интегрированной среды разработки программного обеспечения Фактически, программировать ALPHA XL можно непосредственно с помощью имеющегося дисплея
- 10. Программа управления насосом подкачки должна иметь ПЛК (Программируемый Логический Контроллер). Система запуска должна осуществляться при нажатий
- 12. Скачать презентацию

Необходимость использования контроллеров назрела в начале 1960-ых. Когда промышленность начала предъявлять
Необходимость использования контроллеров назрела в начале 1960-ых. Когда промышленность начала предъявлять
Основной задачей насоса подкачки поддерживать уровень воды в определённой ёмкости. При
Основной задачей насоса подкачки поддерживать уровень воды в определённой ёмкости. При
Программа управления насосом подкачки должна иметь ПЛК (Программируемый Логический Контроллер). Система
Программа управления насосом подкачки должна иметь ПЛК (Программируемый Логический Контроллер). Система
Автоматизация насоса подкачки позволяет добиться бесперебойного и надежного водоснабжения, сократить эксплуатационные
Автоматизация насоса подкачки позволяет добиться бесперебойного и надежного водоснабжения, сократить эксплуатационные
Для разработки данной схемы исходя из задания дипломного проекта выбираем следующие
Для разработки данной схемы исходя из задания дипломного проекта выбираем следующие
Контроллер серии "Альфа-2" без затруднений может быть использован во всех местах,
Контроллер серии "Альфа-2" без затруднений может быть использован во всех местах,
Для запуска системы включаем тумблер, подключенный к контакту I01. В зависимости
Для запуска системы включаем тумблер, подключенный к контакту I01. В зависимости
Выбор интегрированной среды разработки программного обеспечения
Фактически, программировать ALPHA XL можно непосредственно
Выбор интегрированной среды разработки программного обеспечения
Фактически, программировать ALPHA XL можно непосредственно
Программа управления насосом подкачки должна иметь ПЛК (Программируемый Логический Контроллер). Система
Программа управления насосом подкачки должна иметь ПЛК (Программируемый Логический Контроллер). Система
 Инструкции VBA
Инструкции VBA Франшиза сети кинотеатров Люмен фильм. Коммерческое предложение
Франшиза сети кинотеатров Люмен фильм. Коммерческое предложение Кодирование звуковой информации
Кодирование звуковой информации Лесные тайны
Лесные тайны Климатические пояса мира.
Климатические пояса мира. Septic arthritis
Septic arthritis Гавриил Романович Державин (1743-1816). Творчество Г. Р. Державина
Гавриил Романович Державин (1743-1816). Творчество Г. Р. Державина Рубка металла
Рубка металла Предмет и основные этапы развития экономической науки. Лекция 1
Предмет и основные этапы развития экономической науки. Лекция 1 20231031_nauchno-issledovatelskiy_proekt_po_nervnoy_sisteme
20231031_nauchno-issledovatelskiy_proekt_po_nervnoy_sisteme Сущность и составляющие образовательного процесса. Основные участники образовательного процессаго процесса
Сущность и составляющие образовательного процесса. Основные участники образовательного процессаго процесса Ткани животного производства
Ткани животного производства Содержание мероприятий ГО по степеням готовности
Содержание мероприятий ГО по степеням готовности Развитие женских половых органов
Развитие женских половых органов Песня по картинке
Песня по картинке Ұрықтың құрсақ ішілік дамуының тежелуі және жүктілікті жүргізу ерекшеліктері
Ұрықтың құрсақ ішілік дамуының тежелуі және жүктілікті жүргізу ерекшеліктері Педагогическая психология
Педагогическая психология Реализация общесистемных мер снижения административных барьеров и повышения доступности государственных и муниципальных услуг
Реализация общесистемных мер снижения административных барьеров и повышения доступности государственных и муниципальных услуг Пластическая и реконструктивная хирургия
Пластическая и реконструктивная хирургия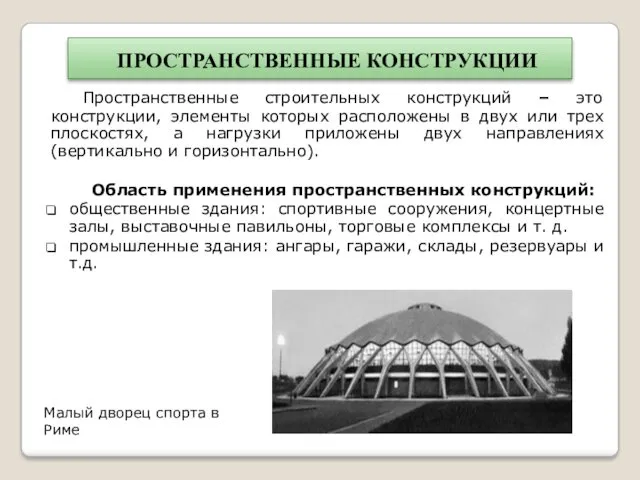 Пространственные конструкции
Пространственные конструкции Мікропроцесорні системи
Мікропроцесорні системи Презентация для логопедических занятий с детьми на тему: Артикуляционная гимнастика (звуки [К][К`][Г][Г`][Х][Х`])
Презентация для логопедических занятий с детьми на тему: Артикуляционная гимнастика (звуки [К][К`][Г][Г`][Х][Х`]) Назначение и состав технологического оборудования стартового комплекса. Лекция 11
Назначение и состав технологического оборудования стартового комплекса. Лекция 11 Технология коррекции звукопроизношения Коноваленко В.В., Коноваленко С.В..
Технология коррекции звукопроизношения Коноваленко В.В., Коноваленко С.В.. Использование игровых технологий в работе с дошкольниками
Использование игровых технологий в работе с дошкольниками Скорость оседания эритроцитов (СОЭ)
Скорость оседания эритроцитов (СОЭ) Техники бисероплетения
Техники бисероплетения Воинская обязанность и формы ее реализации
Воинская обязанность и формы ее реализации