- Решение систем конечных уравнений (СКУ)

Содержание
- 2. Если m>n, то система называется переопределённой. Если m При m=n, такая система называется нормальной системой уравнений.
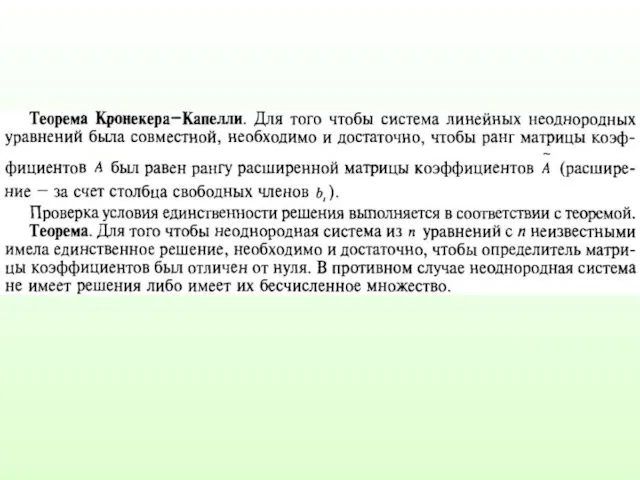
- 3. Системы линейных алгебраических уравнений Система уравнений называется совместной, если существует хотя бы одно решение этой системы,
- 4. 1. Решение системы неоднородных линейных алгебраических уравнений существует и является единственным. Решение этой системы x1=1, x2=2
- 5. 2. Cистема неоднородных линейных алгебраических уравнений вообще не имеет решения. Прямые параллельны и нигде не пересекаются.
- 6. 3. Система неоднородных линейных алгебраических уравнений имеет бесконечное множество решений. Оба уравнения описывают одну и ту
- 7. Методы решения СЛАУ делятся на прямые (в предположении отсутствия ошибок округления позволяют получить точные решения за
- 9. Рассмотрим СЛАУ вида Au = f (2.1) данным затратам машинного времени.
- 10. Если использовать наиболее оптимальный способ расчёта определителя, то для решения СЛАУ методом Крамера потребуется примерно арифметических
- 11. Нормой матрицы Аn⋅n (обозначается ║А║) с вещественными элементами в пространстве матриц называют неотрицательное число, вычисляемое с
- 13. Согласованные с введёнными выше нормами векторов нормы матриц будут определяться следующим образом: (2.3а) (2.3б) (2.3в) и
- 14. Обусловленность СЛАУ Число обусловленности матрицы
- 17. Пример. Вычислить число обусловленности для матрицы А. Для этой матрицы detА = 10-4≠ 0 А-1= 104∙
- 18. Классический пример плохо обусловленной матрицы – матрица Гильберта: aij = 1/(i+ j – 1), i, j
- 19. Прямы методы решения СЛАУ Прямые методы дают решение за конечное число шагов. Они просты и универсальны.
- 20. Для диагональной системы очевидны явные формулы:
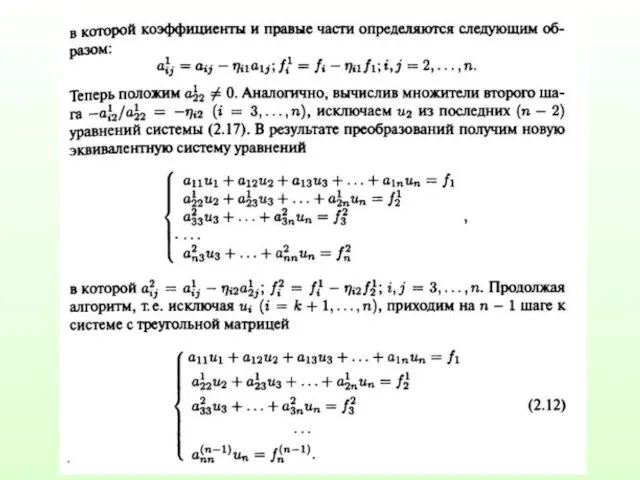
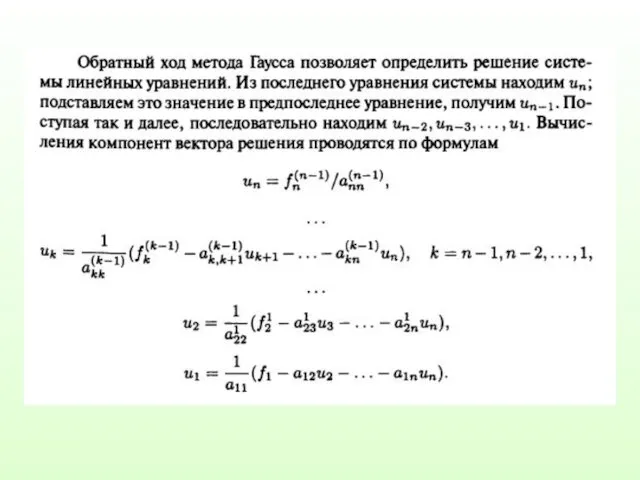
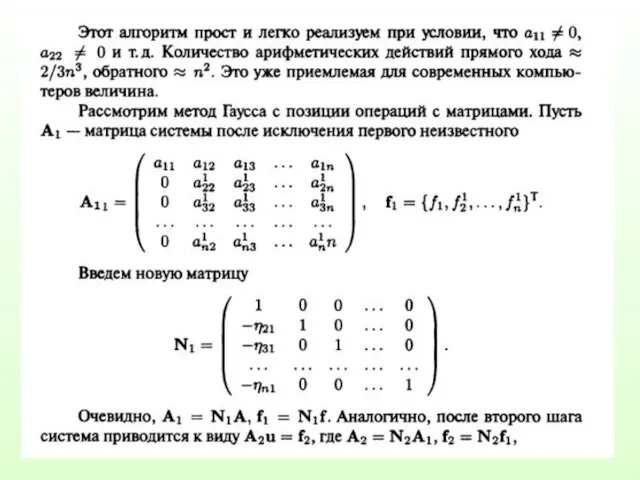
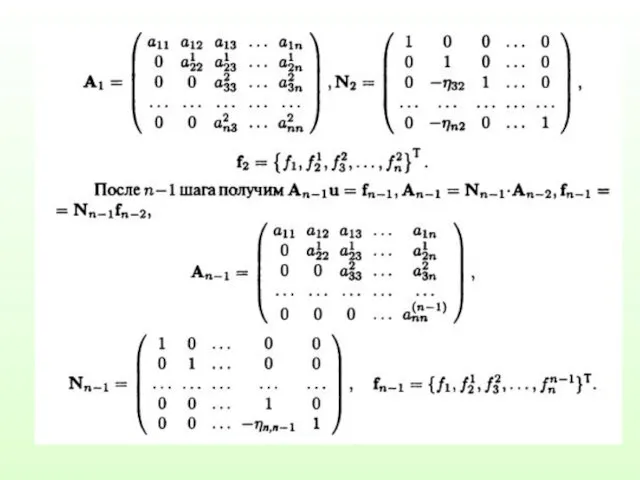
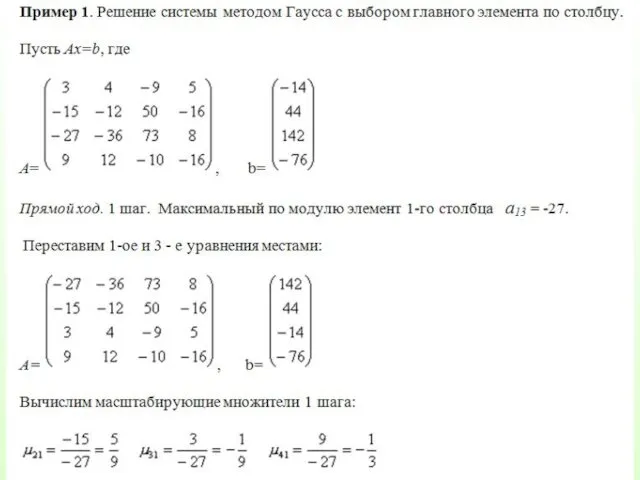
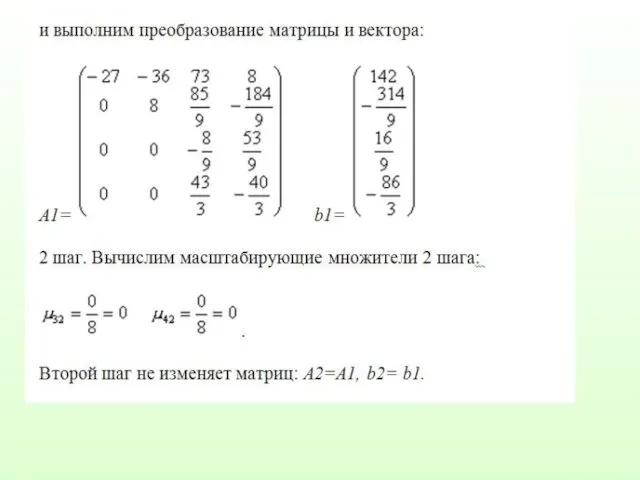
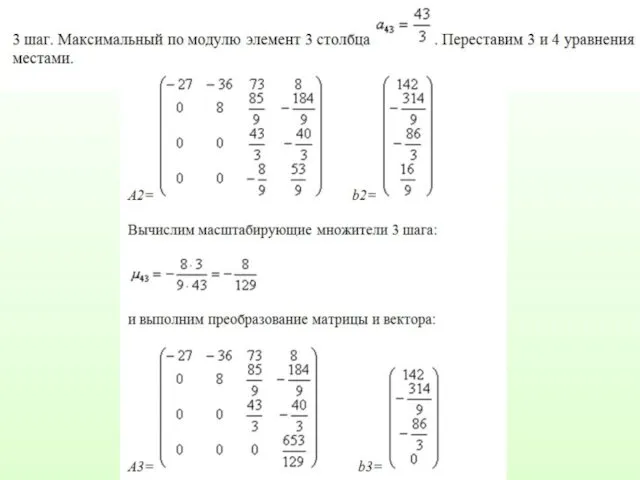
- 21. Метод исключения Гаусса
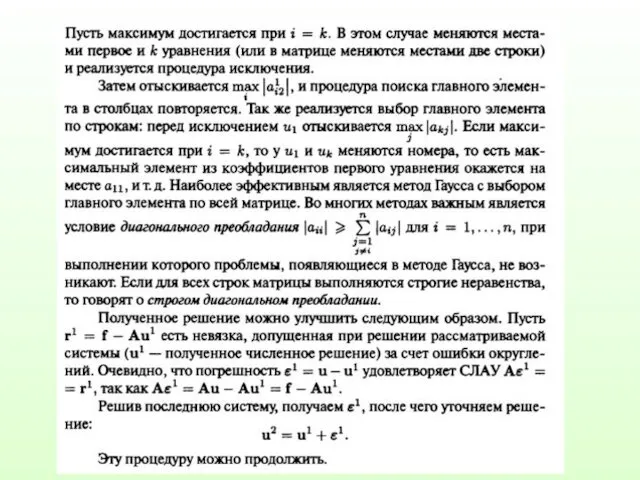
- 27. Если в методе Гаусса элемент на главной диагонали мал, то коэффициенты становятся большими числами, и при
- 29. При решении многих прикладных задач возникают разреженные матрицы, т.е матрицы, в которых много нулевых элементов. К
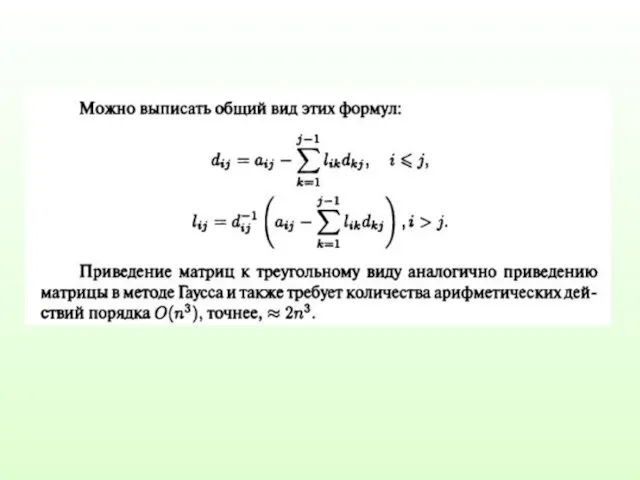
- 30. LU-разложение
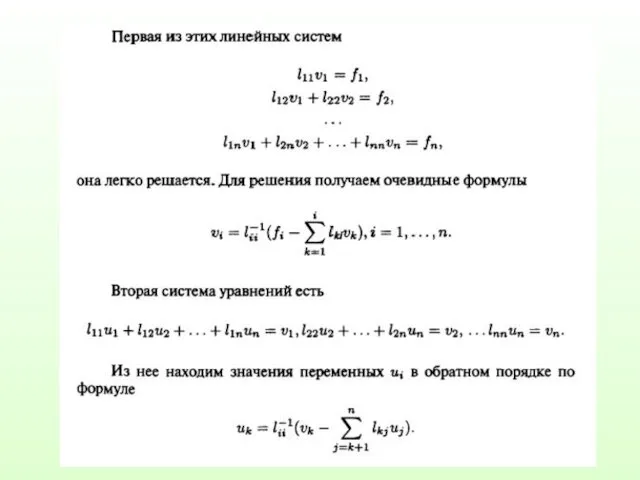
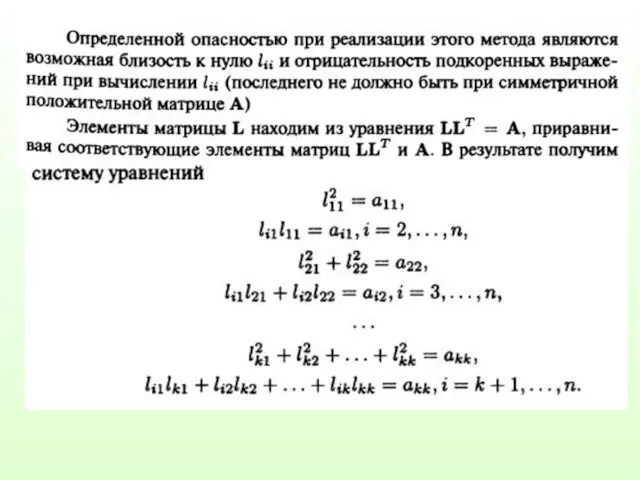
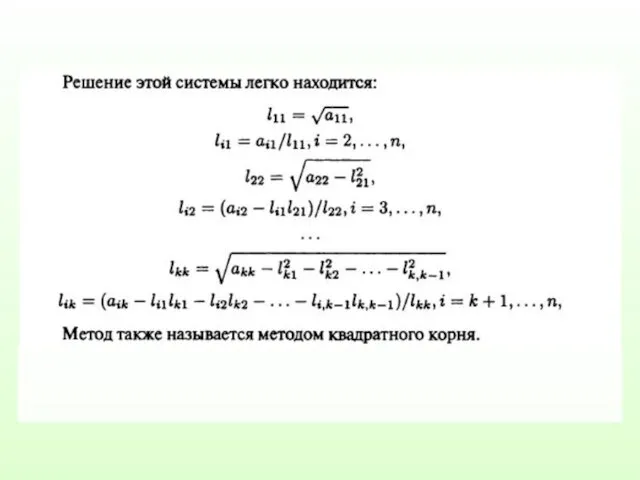
- 34. Метод Холецкого (метод квадратного корня) Пусть матрица А рассматриваемой линейной системы - симметричная, т.е. aij=aji, положительная
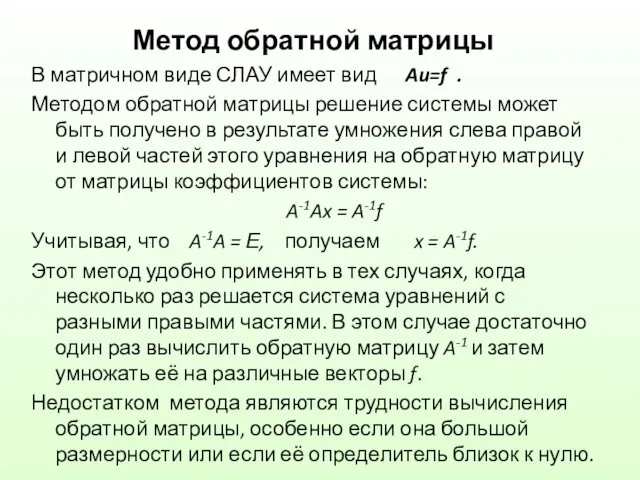
- 38. Метод обратной матрицы В матричном виде СЛАУ имеет вид Au=f . Методом обратной матрицы решение системы
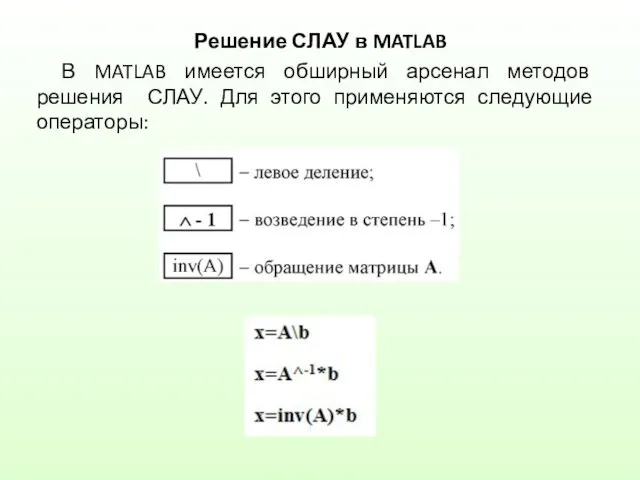
- 39. Решение СЛАУ в MATLAB В MATLAB имеется обширный арсенал методов решения СЛАУ. Для этого применяются следующие
- 40. prod(V) или prod(A,k) – вычисляет произведение элементов массива V или произведения столбцов или строк матрицы в
- 41. sum(V) или sum(A,k) – вычисляет сумму элементов массива V или сумму столбцов или строк матрицы, в
- 42. dot (v1,v2) – вычисляет скалярное произведение векторов v1 и v2, то же значение выдаст функция sum(v1.*v2);
- 43. min(V) – находит минимальный элемент массива V, вызов в формате [k,n]=min(V) даёт возможность определить минимальный элемент
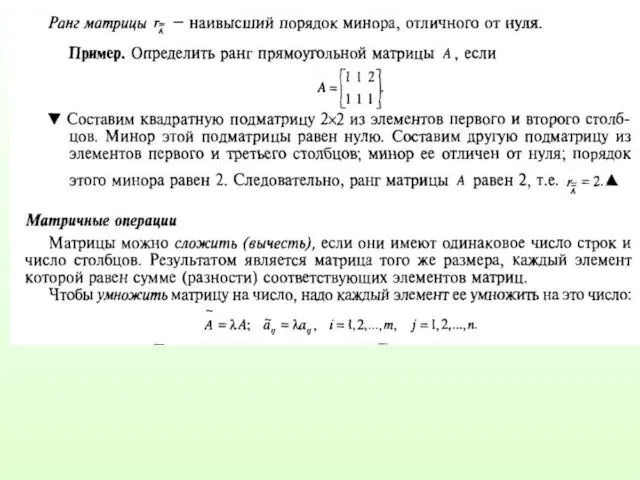
- 44. det(M) – вычисляет определитель квадратной матрицы M; rank(M) – определяет ранг матрицы M; norm(M,p) – вычисляет
- 45. diag(V,n) или diag(V) – создаёт квадратную матрицу с элементами V на n-ой диагонали или элементами V
- 46. linsolve(A,b) - pешение системы линейных уравнений A*x=b, вызов в формате linsolve(A,b,options) позволяет задать метод решения уравнения.
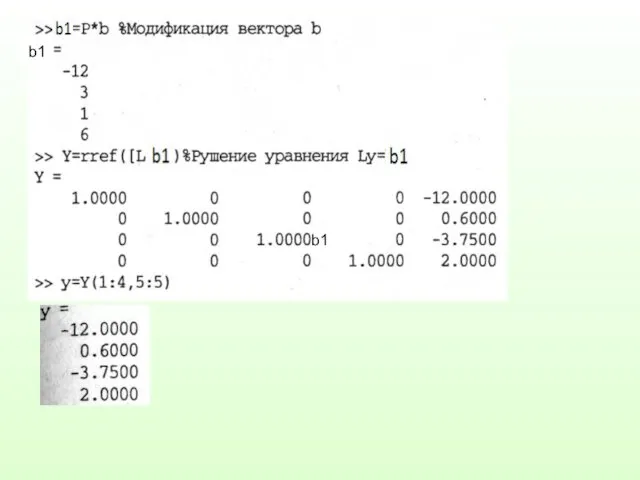
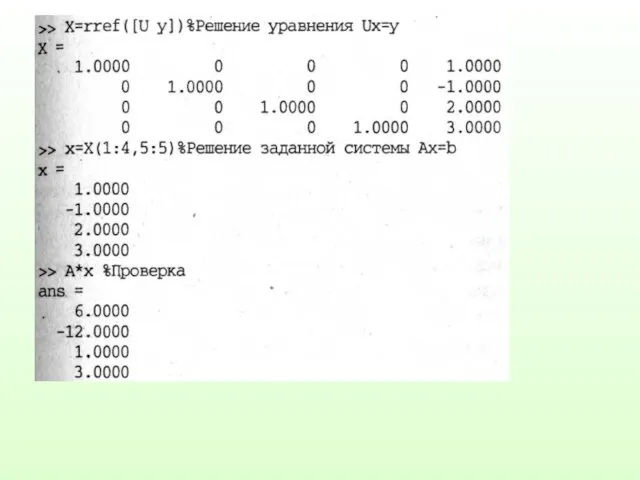
- 47. rref(M) - осуществляет приведение матрицы М к треугольной форме, используя метод исключения Гаусса; >>%Решение системы уравнений
- 48. chol(M) - вычисляет разложение по Холецкому для положительно определённой симметрической матрицы М; >> A=[10 1 1;2
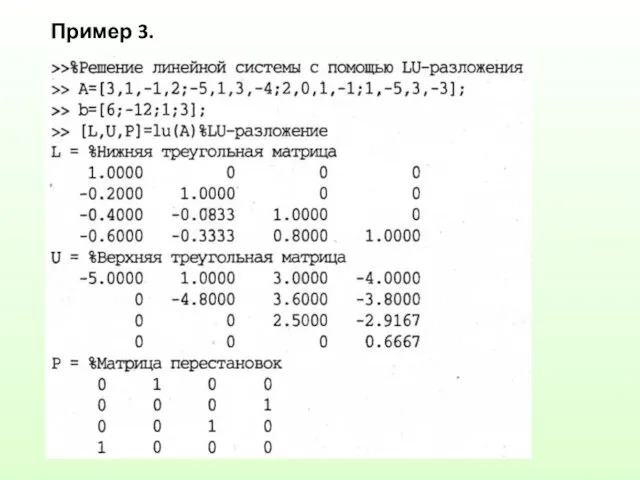
- 49. lu(M) – выполняет LU- разложение, возращает две матрицы: нижнюю треугольную L и верхнюю треугольную U; qr(M)
- 54. % Решим систему, используя LU-разложение [L1,U] = lu(A) y = L1\b x = U\y [L2,U,P] =
- 58. Пример 3.
- 59. b1 b1
- 61. Задания. Решить СЛАУ Определить обусловленность матрицы коэффициентов. 2. Проверить точность решения системы уравнений.
- 62. 3. Решить СЛАУ Проверить точность решения системы уравнений.
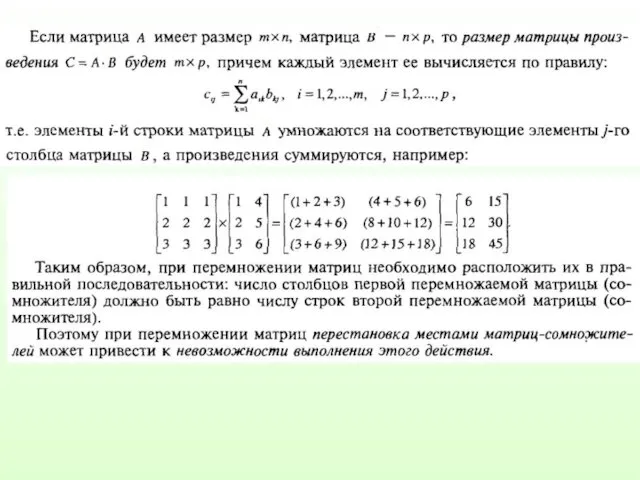
- 63. Приложение Элементы матричной алгебры
- 70. Скачать презентацию
Если m>n, то система называется переопределённой.
Если mПри m=n,
Если m>n, то система называется переопределённой.
Если m
Системы линейных алгебраических уравнений
Система уравнений называется совместной, если существует хотя бы
Системы линейных алгебраических уравнений
Система уравнений называется совместной, если существует хотя бы
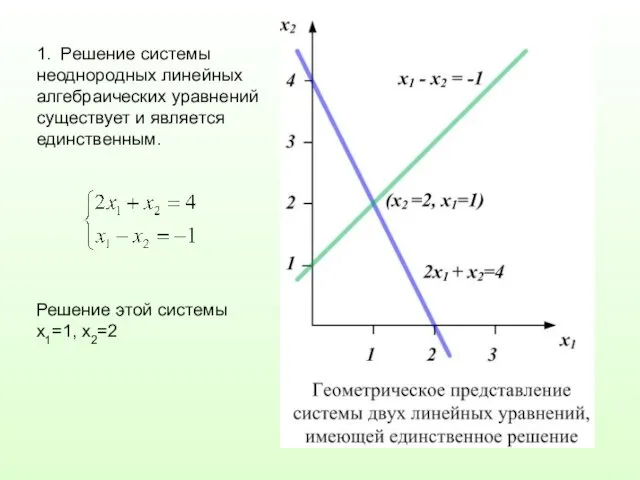
1. Решение системы неоднородных линейных алгебраических уравнений существует и является единственным.
Решение
1. Решение системы неоднородных линейных алгебраических уравнений существует и является единственным.
Решение
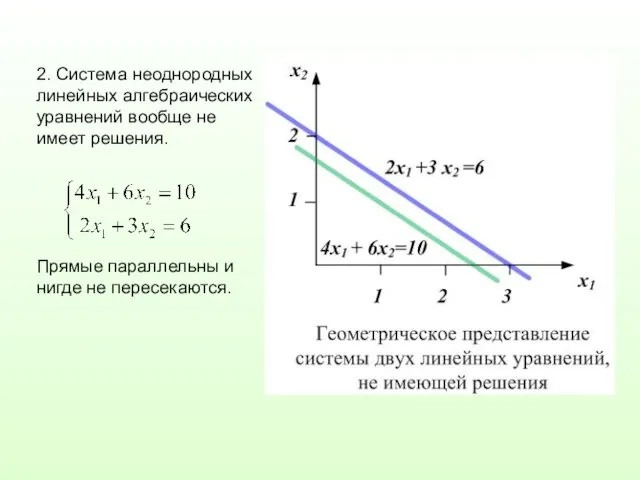
2. Cистема неоднородных линейных алгебраических уравнений вообще не имеет решения.
Прямые параллельны
2. Cистема неоднородных линейных алгебраических уравнений вообще не имеет решения.
Прямые параллельны
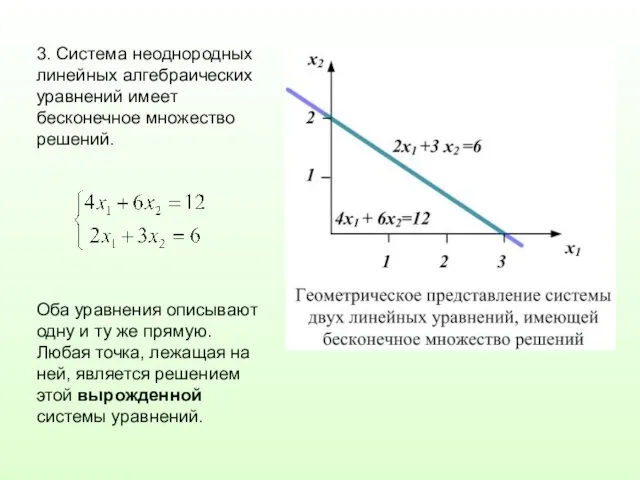
3. Система неоднородных линейных алгебраических уравнений имеет бесконечное множество решений.
Оба уравнения
3. Система неоднородных линейных алгебраических уравнений имеет бесконечное множество решений.
Оба уравнения
Методы решения СЛАУ делятся на прямые
(в предположении отсутствия ошибок округления
Методы решения СЛАУ делятся на прямые
(в предположении отсутствия ошибок округления
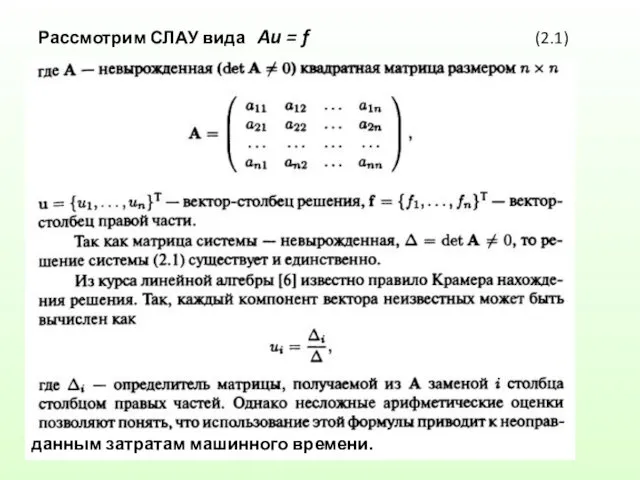
Рассмотрим СЛАУ вида Au = f (2.1)
данным затратам машинного времени.
Рассмотрим СЛАУ вида Au = f (2.1)
данным затратам машинного времени.
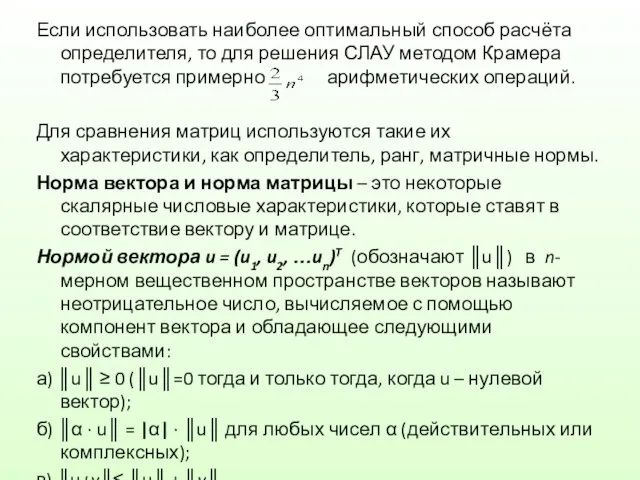
Если использовать наиболее оптимальный способ расчёта определителя, то для решения СЛАУ
Если использовать наиболее оптимальный способ расчёта определителя, то для решения СЛАУ
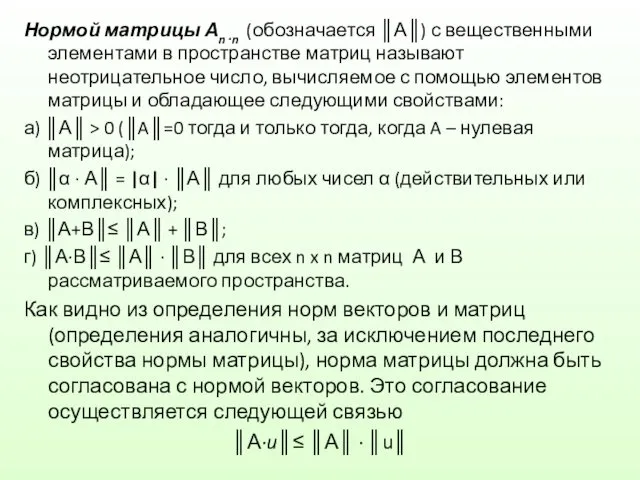
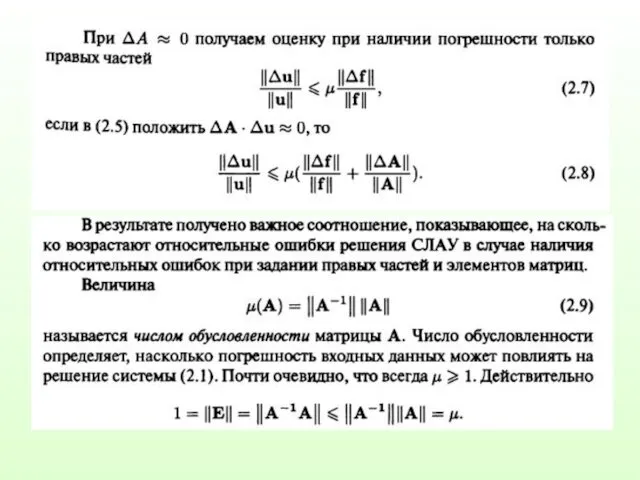
Нормой матрицы Аn⋅n (обозначается ║А║) с вещественными элементами в пространстве матриц
Нормой матрицы Аn⋅n (обозначается ║А║) с вещественными элементами в пространстве матриц
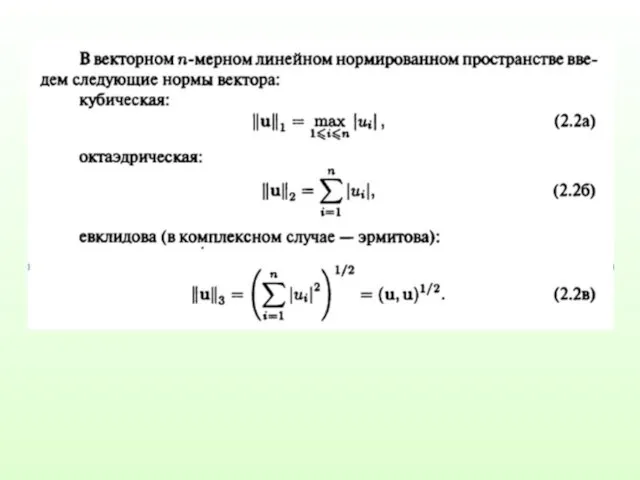

Согласованные с введёнными выше нормами векторов нормы матриц будут определяться следующим
Согласованные с введёнными выше нормами векторов нормы матриц будут определяться следующим
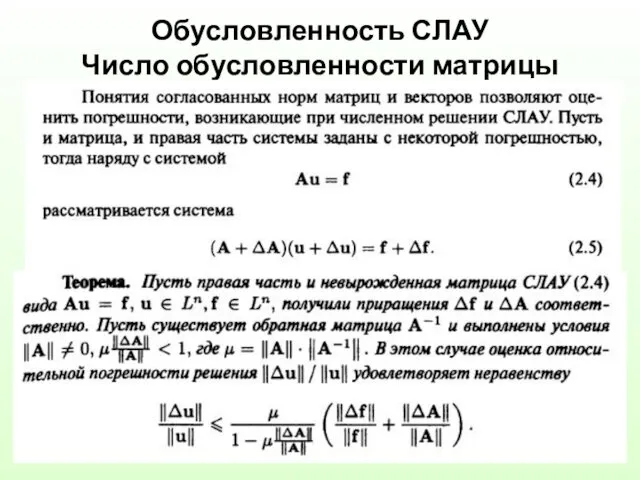
Обусловленность СЛАУ
Число обусловленности матрицы
Обусловленность СЛАУ
Число обусловленности матрицы

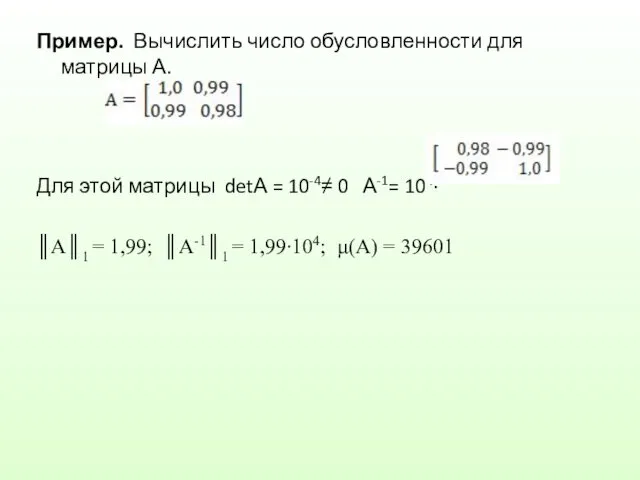
Пример. Вычислить число обусловленности для матрицы А.
Для этой матрицы detА =
Пример. Вычислить число обусловленности для матрицы А.
Для этой матрицы detА =
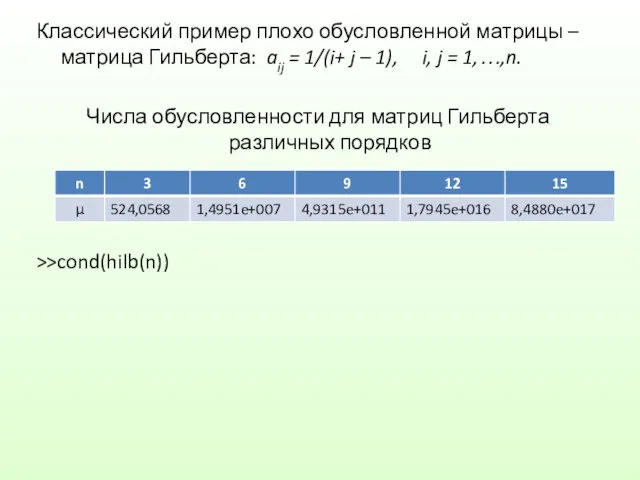
Классический пример плохо обусловленной матрицы – матрица Гильберта: aij = 1/(i+
Классический пример плохо обусловленной матрицы – матрица Гильберта: aij = 1/(i+
Прямы методы решения СЛАУ
Прямые методы дают решение за конечное число шагов.
Прямы методы решения СЛАУ
Прямые методы дают решение за конечное число шагов.
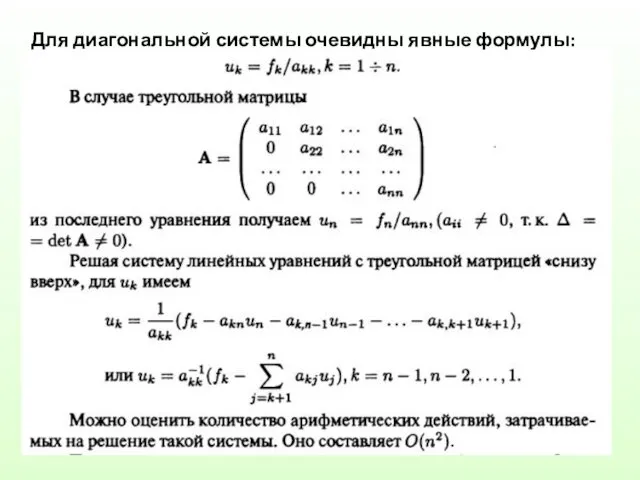
Для диагональной системы очевидны явные формулы:
Для диагональной системы очевидны явные формулы:
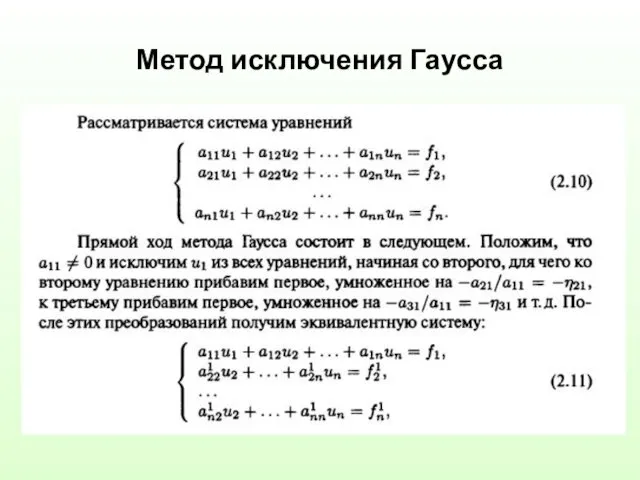
Метод исключения Гаусса
Метод исключения Гаусса

Если в методе Гаусса элемент на главной диагонали мал, то коэффициенты
Если в методе Гаусса элемент на главной диагонали мал, то коэффициенты
При решении многих прикладных задач возникают разреженные матрицы, т.е матрицы, в
При решении многих прикладных задач возникают разреженные матрицы, т.е матрицы, в
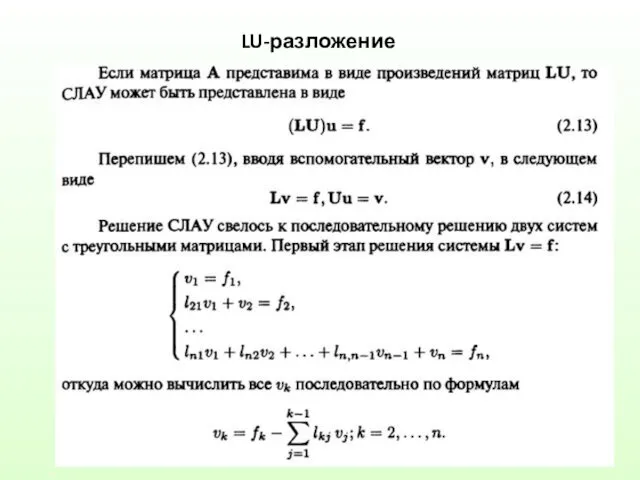
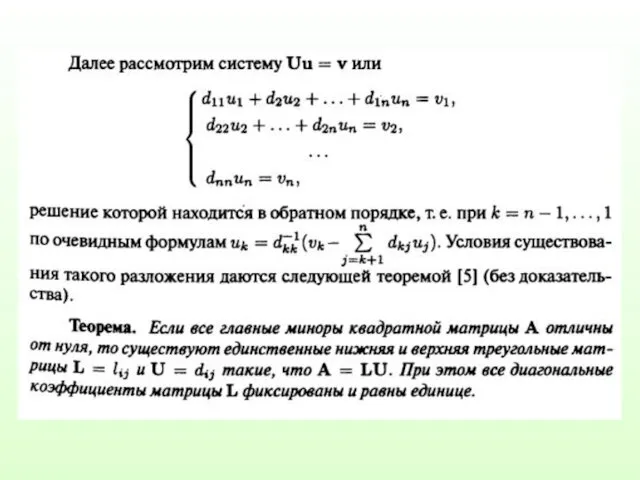
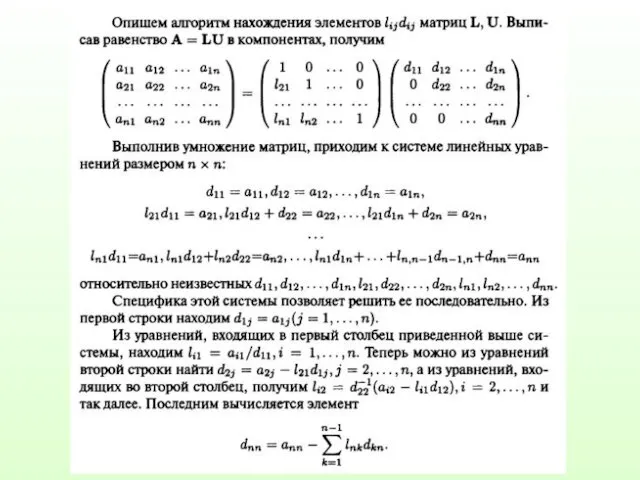
LU-разложение
LU-разложение
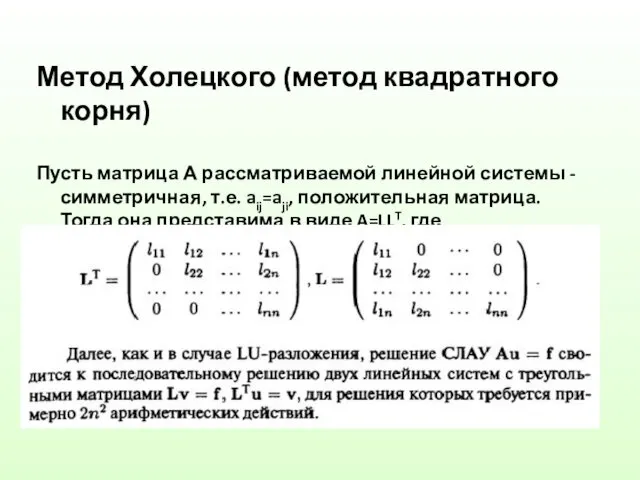
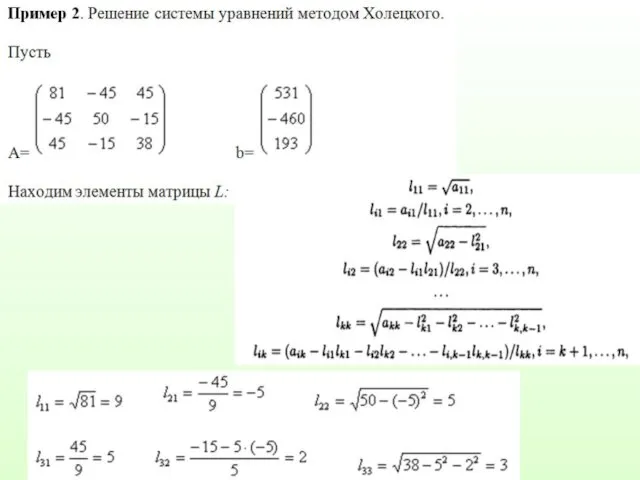
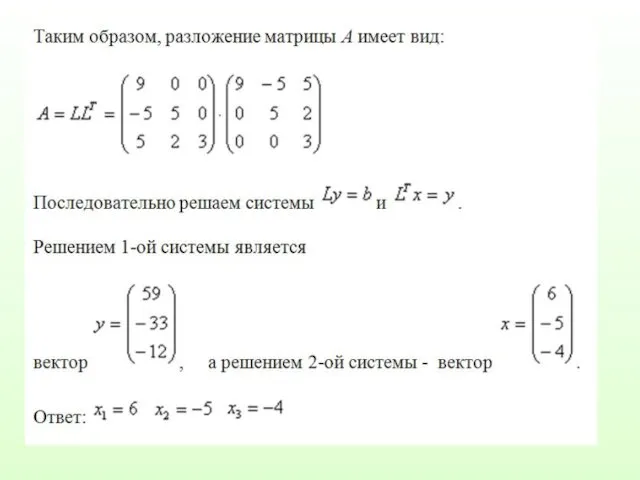
Метод Холецкого (метод квадратного корня)
Пусть матрица А рассматриваемой линейной системы -
Пусть матрица А рассматриваемой линейной системы -
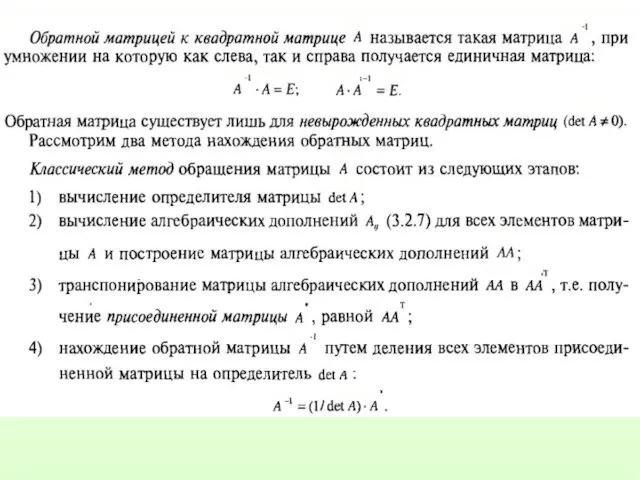
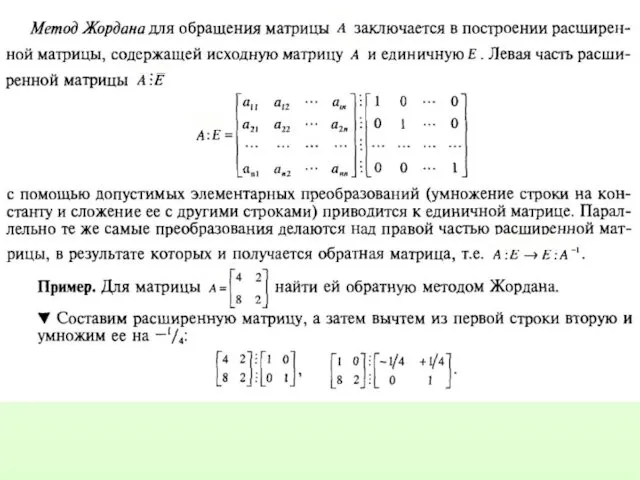
Метод обратной матрицы
В матричном виде СЛАУ имеет вид Au=f .
Методом обратной
Метод обратной матрицы
В матричном виде СЛАУ имеет вид Au=f .
Методом обратной
Решение СЛАУ в MATLAB
В MATLAB имеется обширный арсенал методов решения
Решение СЛАУ в MATLAB
В MATLAB имеется обширный арсенал методов решения
prod(V) или prod(A,k) – вычисляет произведение элементов массива V или произведения
prod(V) или prod(A,k) – вычисляет произведение элементов массива V или произведения
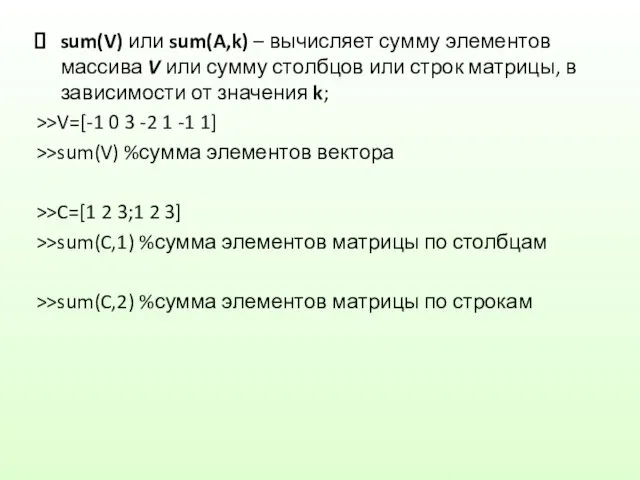
sum(V) или sum(A,k) – вычисляет сумму элементов массива V или сумму
sum(V) или sum(A,k) – вычисляет сумму элементов массива V или сумму
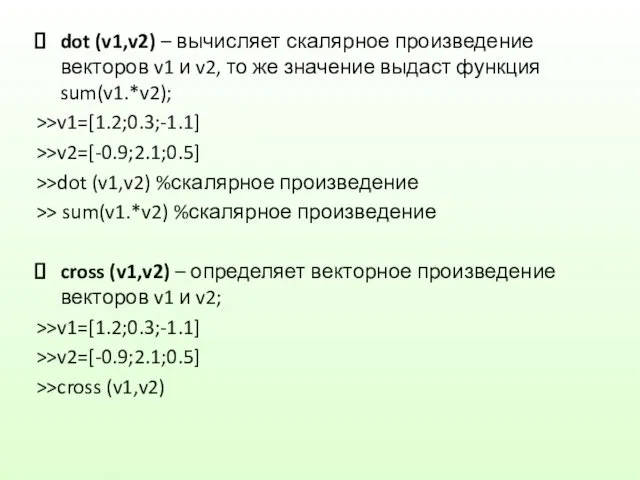
dot (v1,v2) – вычисляет скалярное произведение векторов v1 и v2, то
dot (v1,v2) – вычисляет скалярное произведение векторов v1 и v2, то
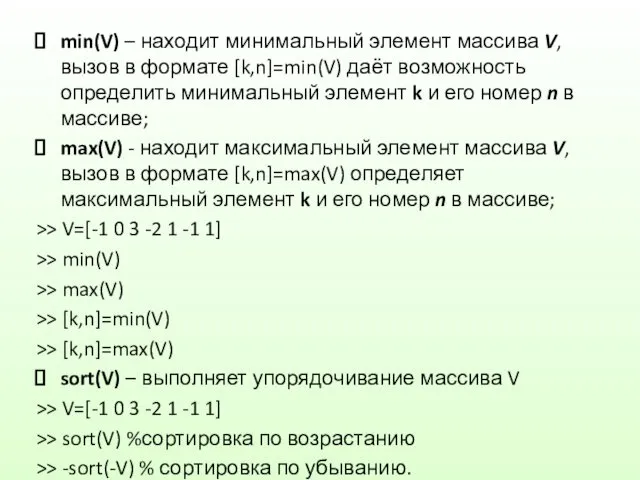
min(V) – находит минимальный элемент массива V, вызов в формате [k,n]=min(V)
min(V) – находит минимальный элемент массива V, вызов в формате [k,n]=min(V)
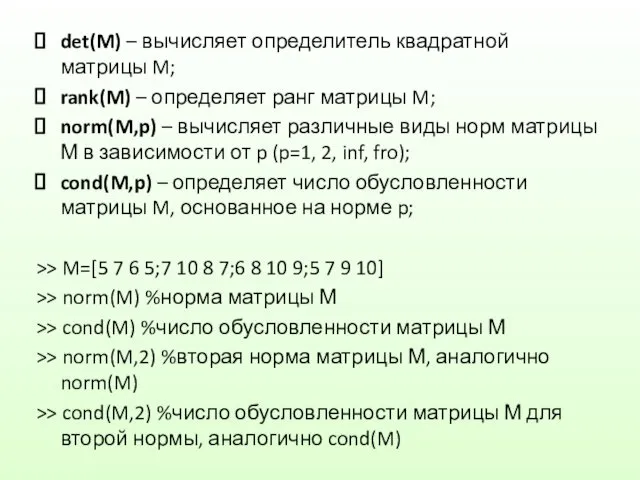
det(M) – вычисляет определитель квадратной матрицы M;
rank(M) – определяет ранг матрицы
det(M) – вычисляет определитель квадратной матрицы M;
rank(M) – определяет ранг матрицы
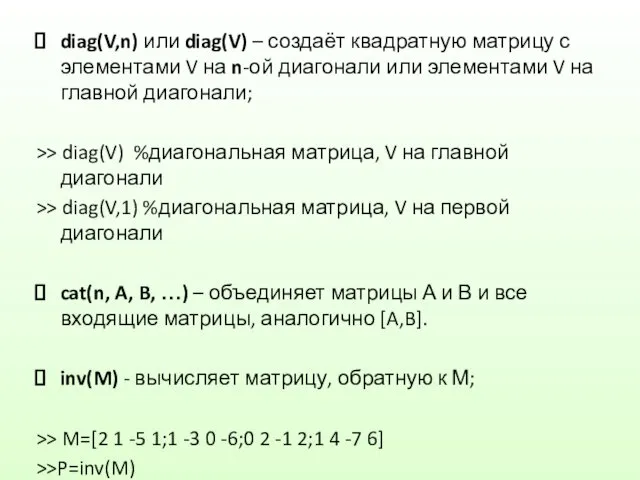
diag(V,n) или diag(V) – создаёт квадратную матрицу с элементами V на
diag(V,n) или diag(V) – создаёт квадратную матрицу с элементами V на
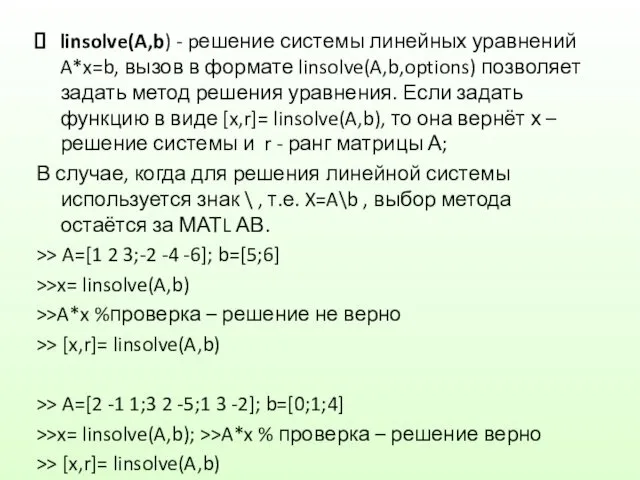
linsolve(A,b) - pешение системы линейных уравнений A*x=b, вызов в формате linsolve(A,b,options)
linsolve(A,b) - pешение системы линейных уравнений A*x=b, вызов в формате linsolve(A,b,options)
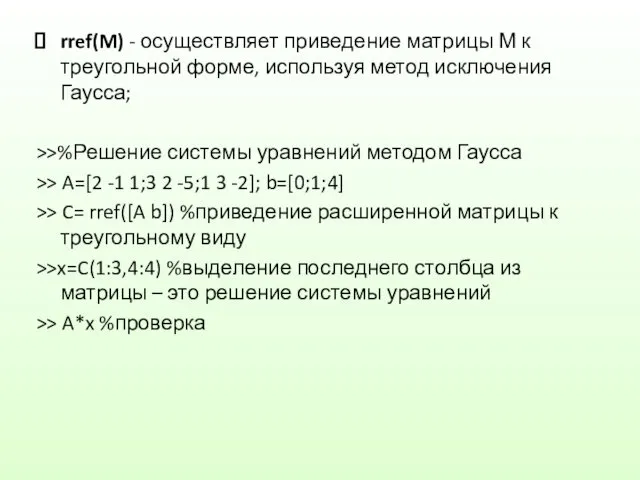
rref(M) - осуществляет приведение матрицы М к треугольной форме, используя метод
rref(M) - осуществляет приведение матрицы М к треугольной форме, используя метод
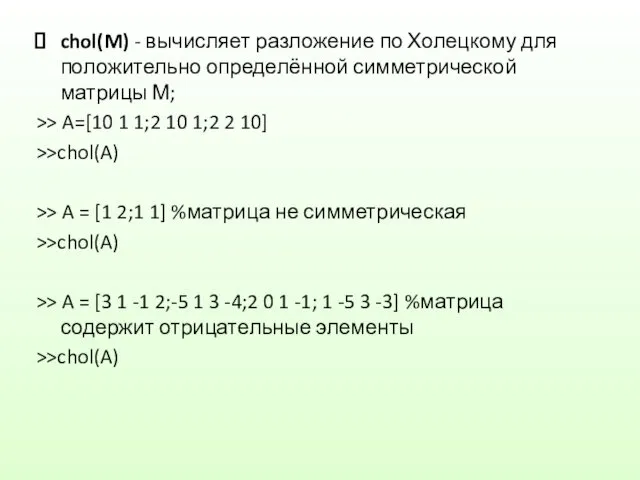
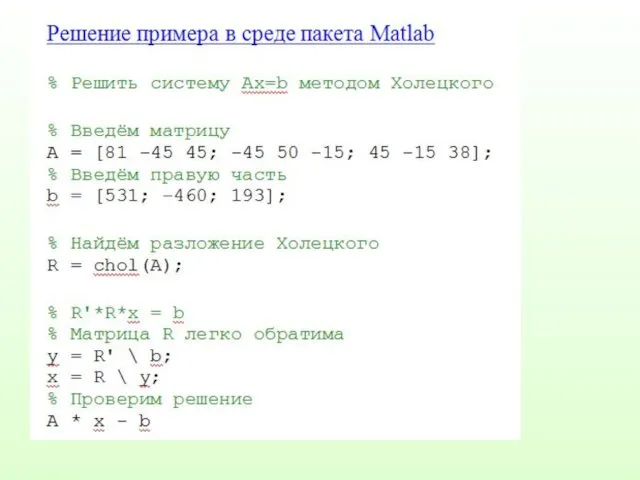
chol(M) - вычисляет разложение по Холецкому для положительно определённой симметрической матрицы
chol(M) - вычисляет разложение по Холецкому для положительно определённой симметрической матрицы
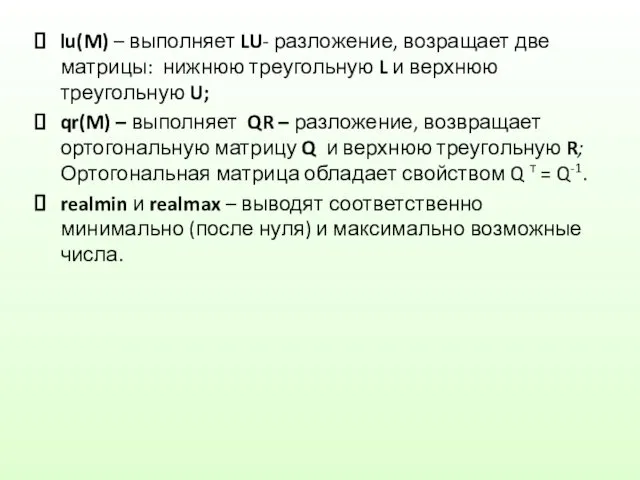
lu(M) – выполняет LU- разложение, возращает две матрицы: нижнюю треугольную L
lu(M) – выполняет LU- разложение, возращает две матрицы: нижнюю треугольную L
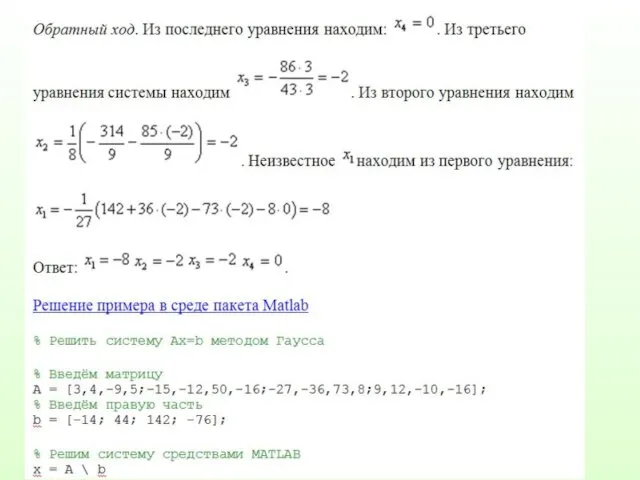
![% Решим систему, используя LU-разложение [L1,U] = lu(A) y =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/74725/slide-53.jpg)
% Решим систему, используя LU-разложение
[L1,U] = lu(A)
y = L1\b
x = U\y
[L2,U,P]
% Решим систему, используя LU-разложение
[L1,U] = lu(A)
y = L1\b
x = U\y
[L2,U,P]
Пример 3.
Пример 3.
b1
b1
b1
b1
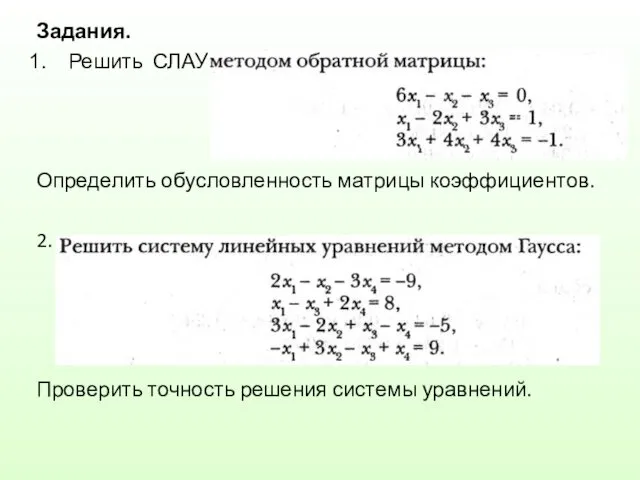
Задания.
Решить СЛАУ
Определить обусловленность матрицы коэффициентов.
2.
Проверить точность решения системы уравнений.
Задания.
Решить СЛАУ
Определить обусловленность матрицы коэффициентов.
2.
Проверить точность решения системы уравнений.
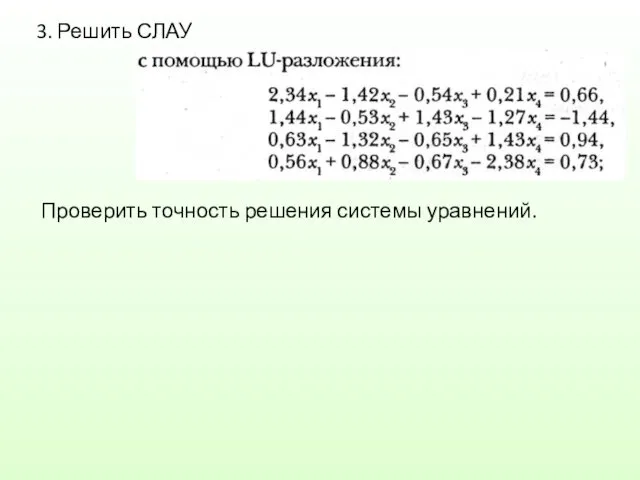
3. Решить СЛАУ
Проверить точность решения системы уравнений.
3. Решить СЛАУ
Проверить точность решения системы уравнений.
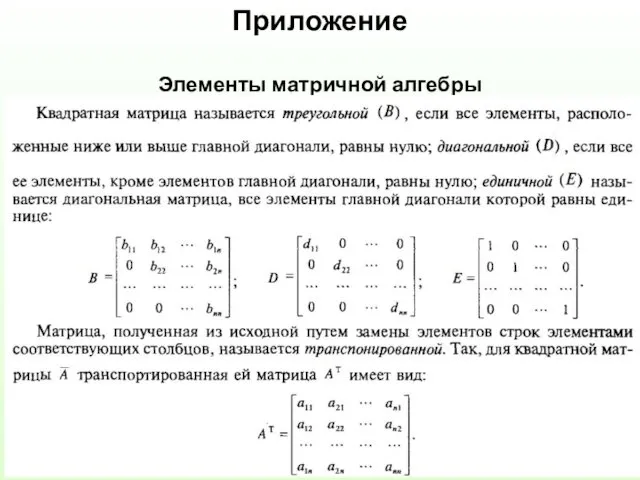
Приложение
Элементы матричной алгебры
Приложение
Элементы матричной алгебры

 Общий менеджмент: ключевые проблемы и основные инструменты
Общий менеджмент: ключевые проблемы и основные инструменты Развитие познавательно - исследовательской деятельности детей старшего возраста
Развитие познавательно - исследовательской деятельности детей старшего возраста Разработка бизнес-плана открытия фитнес клуба Active life г. Санкт-Петербург
Разработка бизнес-плана открытия фитнес клуба Active life г. Санкт-Петербург Советская и российская духовная культура
Советская и российская духовная культура Основы теории проектирования. Жизненный цикл программных систем
Основы теории проектирования. Жизненный цикл программных систем Сахароза. Значение и свойства
Сахароза. Значение и свойства Воспаление. Механизм развития воспаления альтерация
Воспаление. Механизм развития воспаления альтерация Буквы Е, Ё, Ю, Я и их функции в словах
Буквы Е, Ё, Ю, Я и их функции в словах Фосфор
Фосфор Жүректің туа пайда болған ақауының алдын алуда поливитаминдердің тиімділігін бағалау
Жүректің туа пайда болған ақауының алдын алуда поливитаминдердің тиімділігін бағалау Презентация Диаграммы
Презентация Диаграммы Родительское собрание на тему:Здоровье детей в наших руках
Родительское собрание на тему:Здоровье детей в наших руках Лучевая диагностика заболеваний почек
Лучевая диагностика заболеваний почек Насекомые
Насекомые Классный час по правилам пожарной безопасности
Классный час по правилам пожарной безопасности Организации хранения и контроль запасов и сырья. Живая, мороженная и охлажденная рыба
Организации хранения и контроль запасов и сырья. Живая, мороженная и охлажденная рыба Порядок проведения проверки наличия и состояния документов в архиве
Порядок проведения проверки наличия и состояния документов в архиве general_myology
general_myology Окислительно-восстановительные реакции в органической химии
Окислительно-восстановительные реакции в органической химии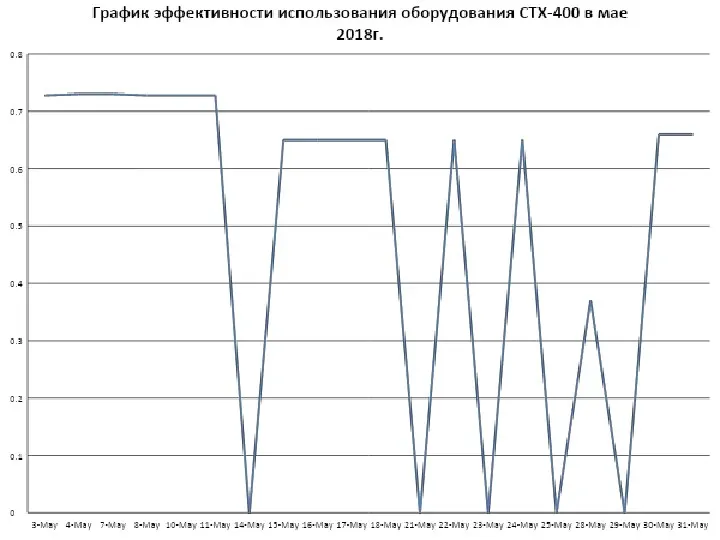 График эффективности использования оборудования СТХ-400 в мае 2018 года
График эффективности использования оборудования СТХ-400 в мае 2018 года Трансляция
Трансляция Проект Моя семья.
Проект Моя семья. Острые расстройства пищеварения
Острые расстройства пищеварения Шашечный турнир в МАДОУ №14 Дельфинчик
Шашечный турнир в МАДОУ №14 Дельфинчик Christmas stories
Christmas stories Гормоны щитовидной железы
Гормоны щитовидной железы Финляндия. Промышленность и сельское хозяйство в Финляндии
Финляндия. Промышленность и сельское хозяйство в Финляндии Текст и предложение. Смысловая связь предложений в тексте. Заголовок текста. (1 класс)
Текст и предложение. Смысловая связь предложений в тексте. Заголовок текста. (1 класс)