- Режимы работы скважинной штанговой насосной установки. Фактор динамичности. (Лекция 6)

Содержание
- 2. Нагрузки, действующие на штанги На колонну насосных штанг действуют постоянные и переменные нагрузки. К постоянным или
- 3. Нагрузки, действующие на штанги и их влияние на ход плунжера Динамика работы ШСН очень сложна. Упрощённая
- 4. При ходе вниз нагнетательный клапан открывается и гидростатические давления над и под плунжером выравниваются. Поэтому нагрузка
- 5. нагрузка от веса жидкости определяется как произведение площади сечения на разность давлений, действующих снизу Рпр и
- 6. Режимы работы скважинной штанговой насосной установки Различают статический и динамический режим работы ШСНУ. Для статических режимов
- 7. Параметр Коши Критерием оценки режима работы установки является параметр динамического подобия, называемый параметром Коши — ϕ
- 8. Параметр Коши можно использовать для разделения режимов работы установки на статические и динамические. Очевидно, что для
- 10. Скачать презентацию
Нагрузки, действующие на штанги
На колонну насосных штанг действуют постоянные и переменные
Нагрузки, действующие на штанги
На колонну насосных штанг действуют постоянные и переменные
Нагрузки, действующие на штанги
и их влияние на ход плунжера
Динамика работы
Нагрузки, действующие на штанги
и их влияние на ход плунжера
Динамика работы
При ходе вниз нагнетательный клапан открывается и гидростатические давления над и
При ходе вниз нагнетательный клапан открывается и гидростатические давления над и
нагрузка от веса жидкости определяется как произведение площади сечения на разность
нагрузка от веса жидкости определяется как произведение площади сечения на разность
Режимы работы скважинной штанговой насосной установки
Различают статический и динамический режим
Режимы работы скважинной штанговой насосной установки
Различают статический и динамический режим
Параметр Коши
Критерием оценки режима работы установки является параметр динамического подобия, называемый
Параметр Коши
Критерием оценки режима работы установки является параметр динамического подобия, называемый
Параметр Коши можно использовать для разделения режимов работы установки на статические
Параметр Коши можно использовать для разделения режимов работы установки на статические
 Зимние забавы.
Зимние забавы. Подагра. Клиника, варианты течения подагры
Подагра. Клиника, варианты течения подагры Argentina (Pure air)
Argentina (Pure air) Наши любимые игрушки
Наши любимые игрушки Кабинет педагога-психолога
Кабинет педагога-психолога обучение правильному согласованию глаголов с существительными в роде
обучение правильному согласованию глаголов с существительными в роде Сбалансированная система показателей (BSC). Группы компаний ПРОТЕК
Сбалансированная система показателей (BSC). Группы компаний ПРОТЕК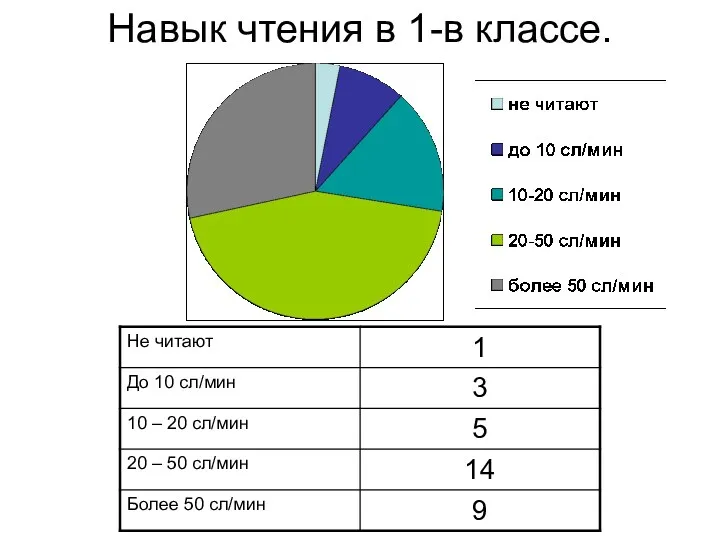 родительское собрание Как привить интерес к чтению1 класс
родительское собрание Как привить интерес к чтению1 класс Презентация к уроку Мужества Парад 7 ноября 1941 года в г.Куйбышев
Презентация к уроку Мужества Парад 7 ноября 1941 года в г.Куйбышев Who am i?
Who am i? Урок вежливости
Урок вежливости Интеллектуальная игра Самый умный
Интеллектуальная игра Самый умный Травмы органа зрения
Травмы органа зрения Система контроля и управления доступом (СКУД)
Система контроля и управления доступом (СКУД) Основные новинки компании LG Electronics
Основные новинки компании LG Electronics sec101-lec07-pub
sec101-lec07-pub Трудные жизненные и экстремальные ситуации в лагере
Трудные жизненные и экстремальные ситуации в лагере Социальный проект Школа добра детского педагогического отряда Колибри
Социальный проект Школа добра детского педагогического отряда Колибри Классификация процессов переработки нефти
Классификация процессов переработки нефти Русская культура Серебряного века
Русская культура Серебряного века Работа с бумагой в нетрадиционной технике - квиллинг Букет нарциссов к 8 марта
Работа с бумагой в нетрадиционной технике - квиллинг Букет нарциссов к 8 марта Приказ министерства образования и науки РФ от 7.04.2014 №276(аттестация пед. работников)
Приказ министерства образования и науки РФ от 7.04.2014 №276(аттестация пед. работников) Выполнение архитектурно-строительных чертежей
Выполнение архитектурно-строительных чертежей Анализ результатов ОГЭ-2019 по обществознанию
Анализ результатов ОГЭ-2019 по обществознанию Презентация к урокам по географии Московской области (2 части)
Презентация к урокам по географии Московской области (2 части) Население Нижегородской области
Население Нижегородской области Компьютер в жизни подростка. Польза или вред?
Компьютер в жизни подростка. Польза или вред? Применение этилена на основе свойств
Применение этилена на основе свойств