- РобоПлатформа. Старт 2.0 Урок 10

Содержание
- 2. 1. 10 тема 2. Машинка 3. План Знакомство с драйвером мотора Влияние «человеческого фактора» Принцип программирования
- 3. Time to think Что мы подключали на прошлом уроке? Какое оборудование использовали?☺ Какие блоки использовали?
- 4. Подпрограмма Человеческий фактор Структура Аварийная ситуация Subprogram Human factor Structure Emergency situation
- 5. Time to think Дайте определение «человеческий фактор»
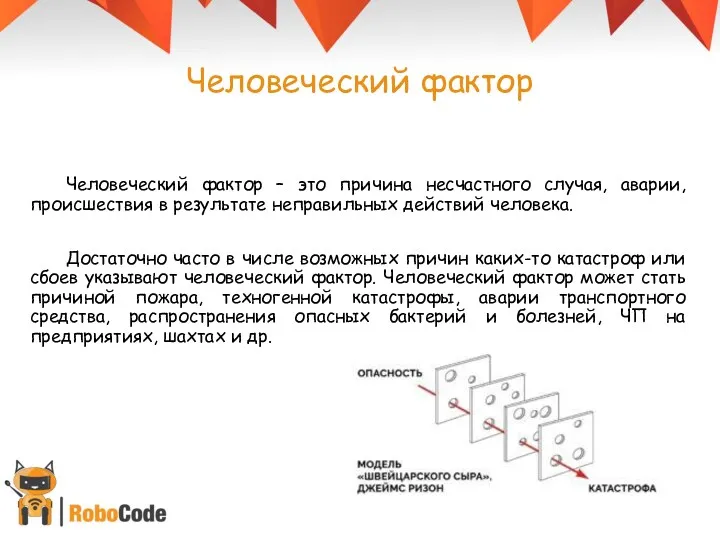
- 6. Человеческий фактор Человеческий фактор – это причина несчастного случая, аварии, происшествия в результате неправильных действий человека.
- 7. Система аварийного торможения САТ использует для своей работы ряд сенсоров, установленных в автомобиле, которые непрерывно анализируют
- 8. Time to think…. Что такое мотор?
- 9. Драйвер моторов Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие сигналы в токи, достаточные
- 10. Контакты на драйвере IN1, IN2 и IN3, IN4 задают направление вращения моторов. Выводы ENABLE A, B
- 11. Подключение
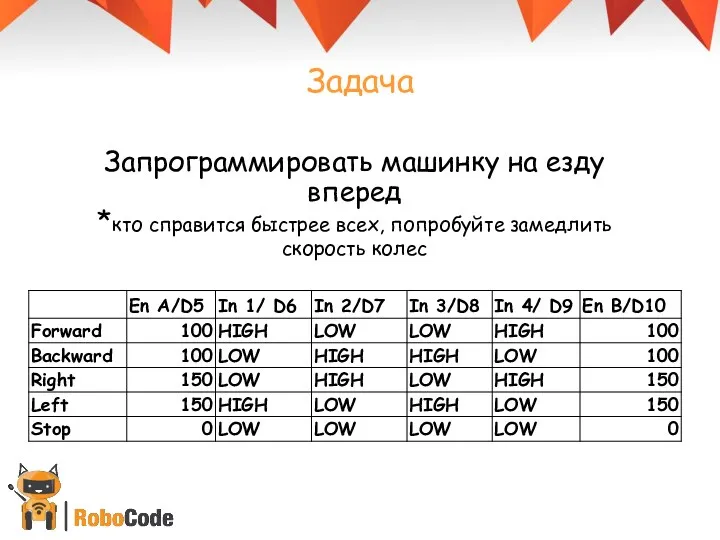
- 12. Задача Запрограммировать машинку на езду вперед *кто справится быстрее всех, попробуйте замедлить скорость колес
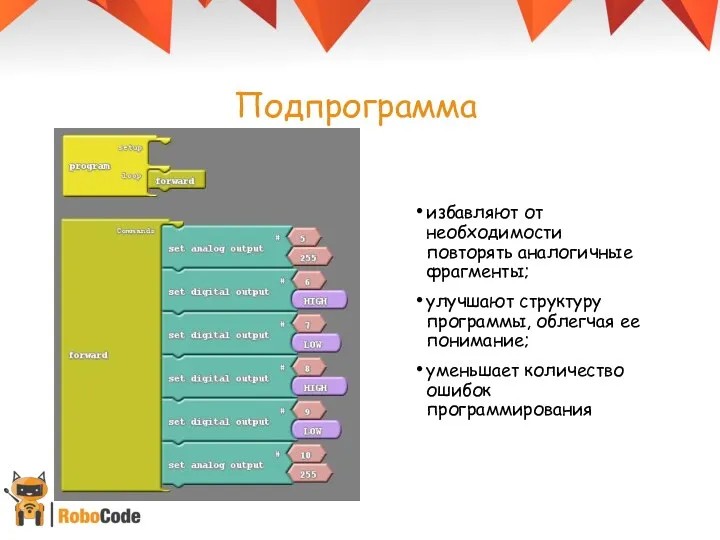
- 13. Подпрограмма избавляют от необходимости повторять аналогичные фрагменты; улучшают структуру программы, облегчая ее понимание; уменьшает количество ошибок
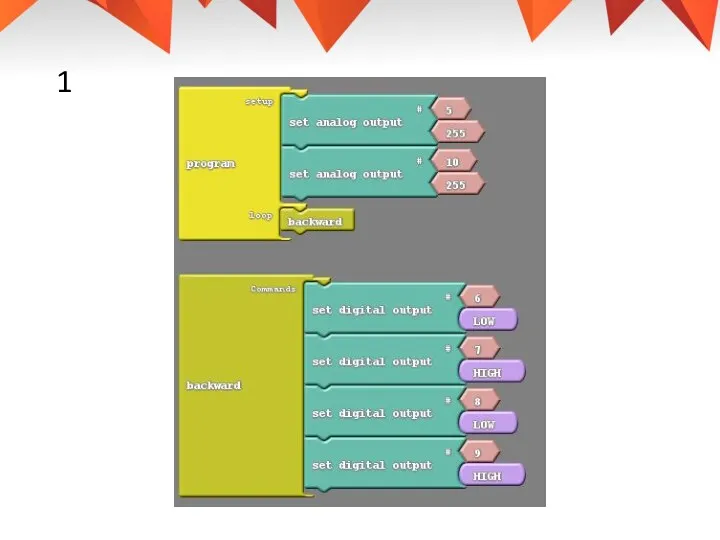
- 14. Задачи 1. Заставить машинку двигаться назад. 2. Сделать систему резкого торможения через определенное время.
- 15. 1
- 16. 2
- 17. Вопросы 1. Что такое «человеческий фактор»? 2. Для чего используется система аварийного торможения? 3. Для чего
- 19. Скачать презентацию
1. 10 тема
2. Машинка
3. План
Знакомство с драйвером мотора
Влияние «человеческого фактора»
Принцип
1. 10 тема
2. Машинка
3. План
Знакомство с драйвером мотора
Влияние «человеческого фактора»
Принцип
Time to think
Что мы подключали на прошлом уроке?
Какое оборудование использовали?☺
Какие
Time to think
Что мы подключали на прошлом уроке?
Какое оборудование использовали?☺
Какие
Подпрограмма
Человеческий фактор
Структура
Аварийная ситуация
Subprogram
Human factor
Structure
Emergency situation
Подпрограмма
Человеческий фактор
Структура
Аварийная ситуация
Subprogram
Human factor
Structure
Emergency situation
Time to think
Дайте определение «человеческий фактор»
Time to think
Дайте определение «человеческий фактор»
Человеческий фактор
Человеческий фактор – это причина несчастного случая, аварии, происшествия в
Человеческий фактор
Человеческий фактор – это причина несчастного случая, аварии, происшествия в
Система аварийного торможения
САТ использует для своей работы ряд сенсоров, установленных в
Система аварийного торможения
САТ использует для своей работы ряд сенсоров, установленных в

Time to think….
Что такое мотор?
Time to think….
Что такое мотор?

Драйвер моторов
Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие
Драйвер моторов
Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие

Контакты на драйвере
IN1, IN2 и IN3, IN4 задают направление вращения моторов.
Выводы ENABLE A,
Контакты на драйвере
IN1, IN2 и IN3, IN4 задают направление вращения моторов.
Выводы ENABLE A,
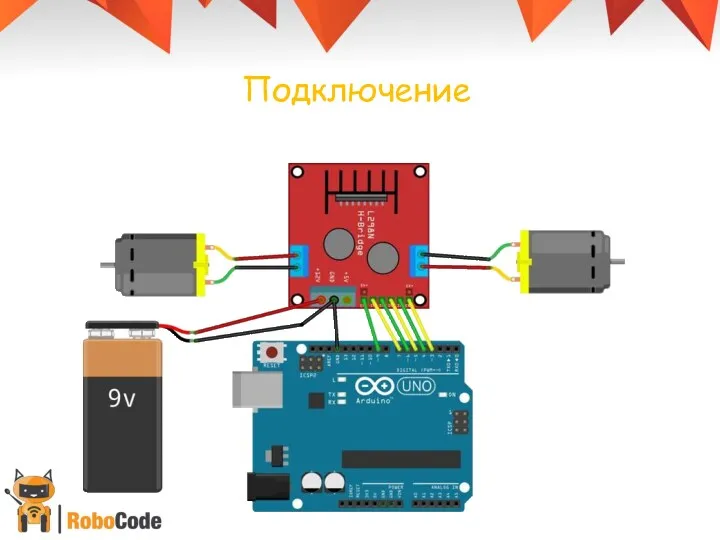
Подключение
Подключение
Задача
Запрограммировать машинку на езду вперед
*кто справится быстрее всех, попробуйте замедлить скорость
Задача
Запрограммировать машинку на езду вперед *кто справится быстрее всех, попробуйте замедлить скорость
Подпрограмма
избавляют от необходимости повторять аналогичные фрагменты;
улучшают структуру программы, облегчая ее понимание;
уменьшает
Подпрограмма
избавляют от необходимости повторять аналогичные фрагменты;
улучшают структуру программы, облегчая ее понимание;
уменьшает

Задачи
1. Заставить машинку двигаться назад.
2. Сделать систему резкого торможения через определенное
Задачи
1. Заставить машинку двигаться назад.
2. Сделать систему резкого торможения через определенное
1
1

2
2
Вопросы
1. Что такое «человеческий фактор»?
2. Для чего используется система аварийного торможения?
3.
Вопросы
1. Что такое «человеческий фактор»?
2. Для чего используется система аварийного торможения?
3.
 Интерактивная деловая игра Критики и лоббисты: основные теории происхождения государства
Интерактивная деловая игра Критики и лоббисты: основные теории происхождения государства Принципы организации по ведению школ с БА и ХОБЛ
Принципы организации по ведению школ с БА и ХОБЛ Жанры изобразительного искусства
Жанры изобразительного искусства Творческая работа. Дольмены
Творческая работа. Дольмены Развитие зрительного восприятия у детей дошкольного возраста.
Развитие зрительного восприятия у детей дошкольного возраста. Проукция Новолипецкого металлургического комбината
Проукция Новолипецкого металлургического комбината Сцинтилляционный детектор. Счетчик Крукса
Сцинтилляционный детектор. Счетчик Крукса Технология развития речи детей с интеллектуальными нарушениями
Технология развития речи детей с интеллектуальными нарушениями Экологический-образовательный проект
Экологический-образовательный проект Общая характеристика стран зарубежной Европы
Общая характеристика стран зарубежной Европы Роль и значение медицинской сестры в сестринском патронаже детей от года до трех лет
Роль и значение медицинской сестры в сестринском патронаже детей от года до трех лет Окислительно-восстановительные процессы при ИИ и методы МР для их лечения
Окислительно-восстановительные процессы при ИИ и методы МР для их лечения Презентация Много на елочке шариков цветных
Презентация Много на елочке шариков цветных Антихрупкость2 Ценностная синхрон
Антихрупкость2 Ценностная синхрон Религии и народы
Религии и народы Кривое зеркало, что в своем отражении видит сатана. Апокрифы
Кривое зеркало, что в своем отражении видит сатана. Апокрифы Наш православный Пермский край
Наш православный Пермский край Истина и ее критерии
Истина и ее критерии Международные отношения и политика СССР в Европе во 2-й половине 40-х годов
Международные отношения и политика СССР в Европе во 2-й половине 40-х годов Отечественный опыт стандартизации в образовании
Отечественный опыт стандартизации в образовании Short form, colloquial expression
Short form, colloquial expression Итоги реализации ФГОС
Итоги реализации ФГОС Курганская область на карте России
Курганская область на карте России Углеводороды. Алканы
Углеводороды. Алканы Основные принципы и концепции логистики
Основные принципы и концепции логистики Растворы (лекция 2)
Растворы (лекция 2) Механизм мышечного сокращения
Механизм мышечного сокращения f9be2c610993755559737dc376873ab07f7a592
f9be2c610993755559737dc376873ab07f7a592