- Robotics

Содержание
- 2. Robotics Robotic History Robotic Technology Types of Robots
- 3. What is a Robot…? A re-programmable, multifunctional, automatic industrial machine designed to replace human in hazardous
- 4. WHAT IS ROBOTICS...? Robotics is science of designing or building an application of robots. Simply ,Robotics
- 5. ROBOTIC HISTORY First use of the word “Robotics” Three Laws of Robotics The first robot “Ultimate”
- 6. First use of the word “Robotics” The word robot was introduced to the public by Czech
- 7. For a robot to have the best level of success 4 R’s were created to ensure
- 8. The First Robot “UNIMATE”
- 9. robotics technology Sensors Effectors Actuators Controllers Arms Most industrial robots have at least the following five
- 10. Sensor Effector
- 11. Controller Arm
- 12. ` Types of Robots Mobile Robots The most common types of Robots are.. Autonomous Robots Virtual
- 13. Mobile Robots Mobile robots are of two types…. Rolling Robots- Rolling robots have wheels to move
- 14. tonomous Stationary Robots Robots are not only used to explore areas or imitate a human being.
- 15. Remote-Control Robots A person can guide a robot by remote control. A person can perform difficult
- 17. Скачать презентацию
Robotics
Robotic
History
Robotic
Technology
Types of
Robots
Robotics
Robotic
History
Robotic
Technology
Types of
Robots
What is a Robot…?
A re-programmable, multifunctional, automatic industrial machine designed to
What is a Robot…?
A re-programmable, multifunctional, automatic industrial machine designed to
WHAT IS ROBOTICS...?
Robotics is science of designing or building an application
WHAT IS ROBOTICS...?
Robotics is science of designing or building an application
ROBOTIC HISTORY
First use of the word “Robotics”
Three Laws of Robotics
The
ROBOTIC HISTORY
First use of the word “Robotics”
Three Laws of Robotics
The
First use of the word “Robotics”
The word robot was introduced to
First use of the word “Robotics”
The word robot was introduced to
For a robot to have the best level of success 4
For a robot to have the best level of success 4
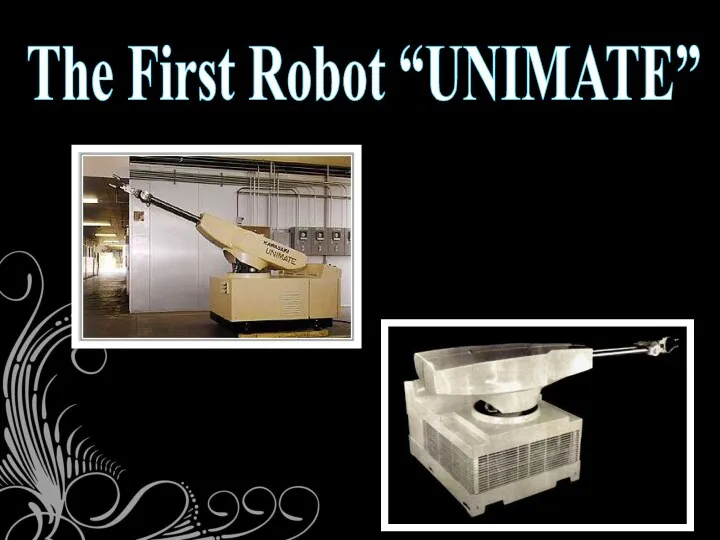
The First Robot “UNIMATE”
The First Robot “UNIMATE”
robotics technology
Sensors
Effectors
Actuators
Controllers
Arms
Most industrial robots have at least the following five parts:
robotics technology
Sensors
Effectors
Actuators
Controllers
Arms
Most industrial robots have at least the following five parts:
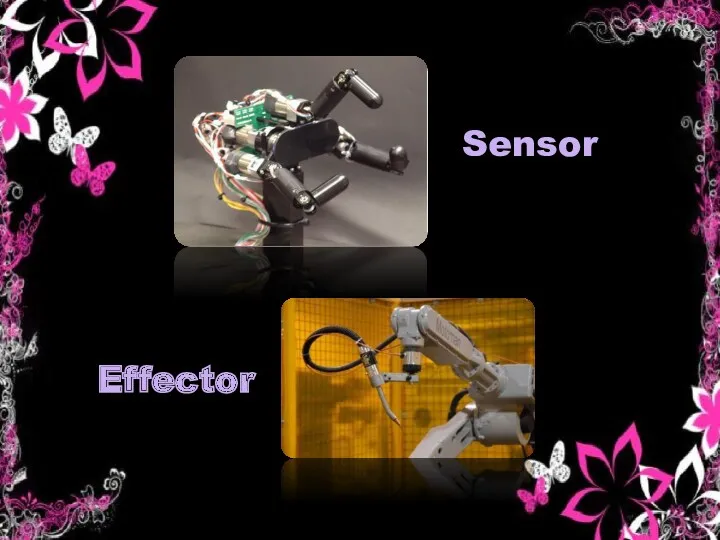
Sensor
Effector
Sensor
Effector
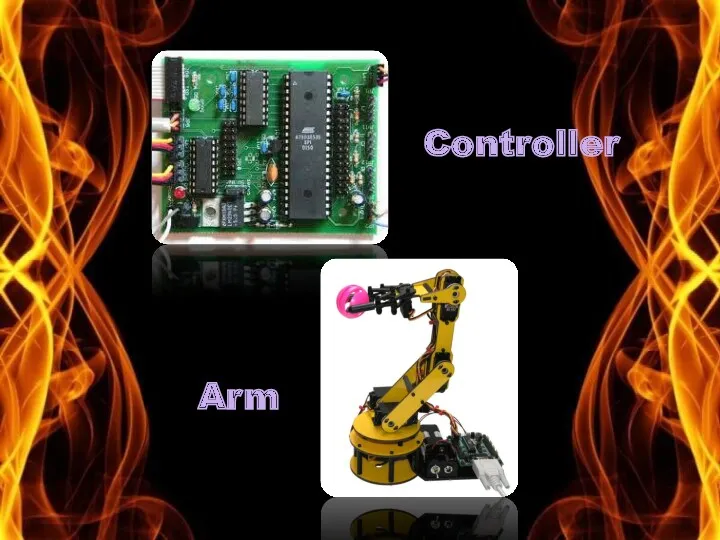
Controller
Arm
Controller
Arm
`
Types of Robots
Mobile Robots
The most common types of Robots are..
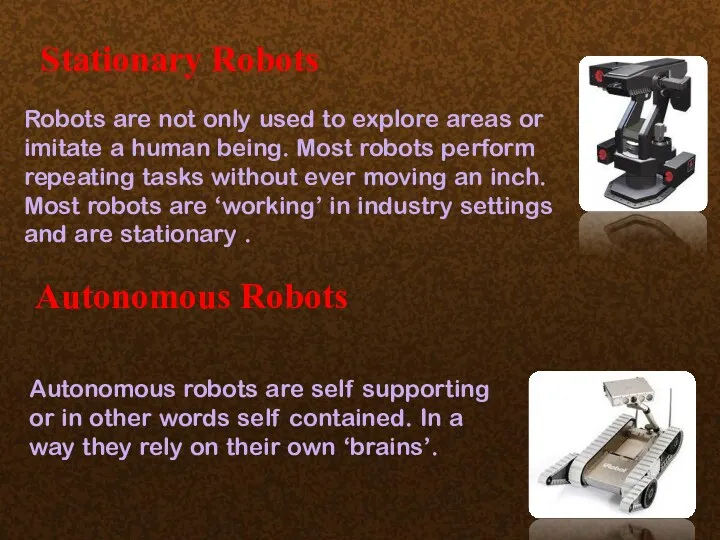
Autonomous Robots
Virtual
`
Types of Robots
Mobile Robots
The most common types of Robots are..
Autonomous Robots
Virtual
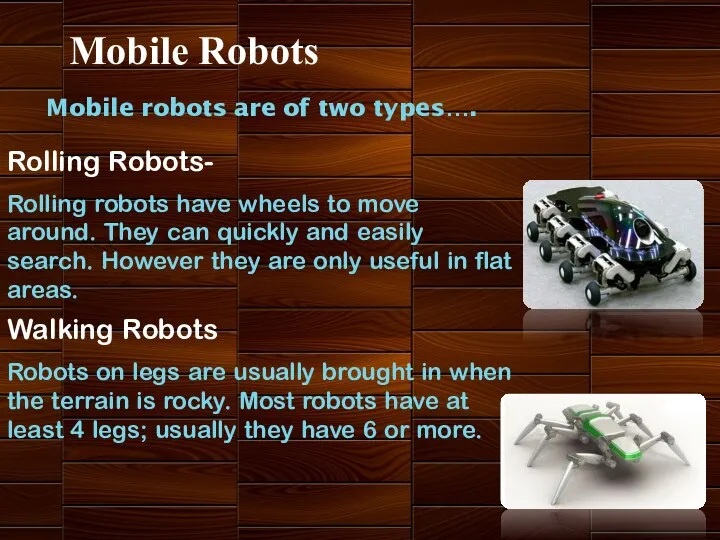
Mobile Robots
Mobile robots are of two types….
Rolling Robots-
Rolling robots
Mobile Robots
Mobile robots are of two types….
Rolling Robots-
Rolling robots
tonomous
Stationary Robots
Robots are not only used to explore areas or imitate
tonomous
Stationary Robots
Robots are not only used to explore areas or imitate
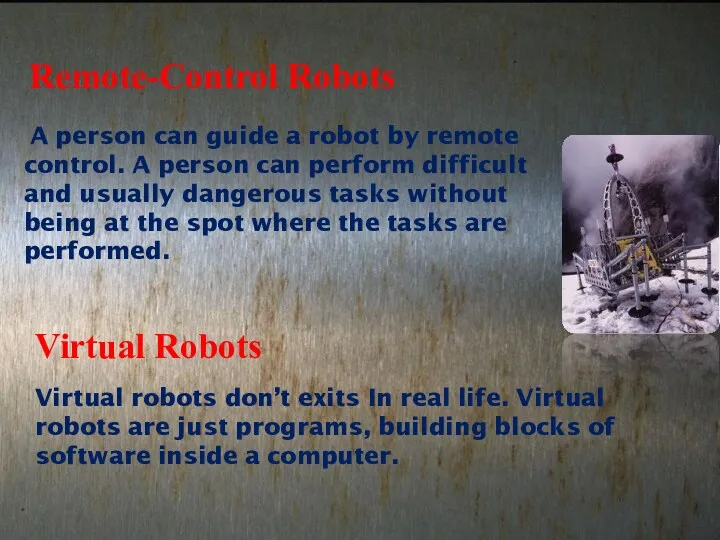
Remote-Control Robots
A person can guide a robot by remote control.
Remote-Control Robots
A person can guide a robot by remote control.
 Basic spoken chinese. Lesson 2
Basic spoken chinese. Lesson 2 Презентация 5 класс ФГОС Планеты Солнечной системы
Презентация 5 класс ФГОС Планеты Солнечной системы Методы исследования механической активности сердца
Методы исследования механической активности сердца Понятие и виды юридической ответственности за земельные правонарушение
Понятие и виды юридической ответственности за земельные правонарушение Принципы миссионерской деятельности святого апостола Павла
Принципы миссионерской деятельности святого апостола Павла Наложение повязок
Наложение повязок Учащийся как субъект познания
Учащийся как субъект познания Контрольно-обобщающий урок Вещества
Контрольно-обобщающий урок Вещества Функциональдық іш қатулар. Балалардың ішектеріндегі анатомо-физиологиялық ерекшеліктері
Функциональдық іш қатулар. Балалардың ішектеріндегі анатомо-физиологиялық ерекшеліктері Строительство Бурдж-Халифа
Строительство Бурдж-Халифа Российская нефтяная компания ПАО Татнефть
Российская нефтяная компания ПАО Татнефть Комплексный подход к системе оценки результатов образования согласно ФГОС
Комплексный подход к системе оценки результатов образования согласно ФГОС Использование калькуляторов на ЕГЭ
Использование калькуляторов на ЕГЭ Простой софт: учет компьютеров
Простой софт: учет компьютеров Презентация программы внеурочной деятельности для 5 класса Юный барабанщик (социальная направленность).
Презентация программы внеурочной деятельности для 5 класса Юный барабанщик (социальная направленность). Влияние качества электрической энергии на работу электроприемников
Влияние качества электрической энергии на работу электроприемников Необычные растения и животные в природе
Необычные растения и животные в природе СТО Сам себе мастер
СТО Сам себе мастер экстремизм және терроризм - қазіргі заман мәселелері
экстремизм және терроризм - қазіргі заман мәселелері Lukoil company
Lukoil company ГПД 1-4 кл. 2012 год. Презентация к игре Что? Где? Когда?
ГПД 1-4 кл. 2012 год. Презентация к игре Что? Где? Когда? Мама в детстве. Мама дома
Мама в детстве. Мама дома Производство конструкционных материалов
Производство конструкционных материалов Художник иллюстратор Леонид Владимирский
Художник иллюстратор Леонид Владимирский презентацияДетям о Великой отечественной войне
презентацияДетям о Великой отечественной войне Подготовительная группа Буратино. Жизнь нашей группы
Подготовительная группа Буратино. Жизнь нашей группы Предметно - развивающая среда в старшей группе.
Предметно - развивающая среда в старшей группе. Философия Древнего мира
Философия Древнего мира