- Робототехника. Обнаружение и подсчёт перекрестков

Содержание
- 2. Редко встречаются дороги, которые не пересекаются с другими дорогами. Перекресток – это одно из самых сложных
- 3. Для робота, двигающегося по линии на двух датчиках света, перекресток – это когда оба датчика находятся
- 4. Проверку на одновременное определение черного цвета двумя датчиками лучше разместить в условии цикла: && -одновременное условие
- 5. Случается, что перекресток необходимо проезжать, но при этом производить подсчёт перекрестков по ходу движения. Допустим, робот
- 6. Чтобы избежать подобных нежелательных событий, после обнаружения роботом перекрестка и его подсчета, робота необходимо согнать с
- 7. Это программа считает перекрестки при движении робота и останавливает его на пятом перекрестке: Здесь движение по
- 9. Скачать презентацию

Редко встречаются дороги, которые не пересекаются с другими дорогами. Перекресток –
Редко встречаются дороги, которые не пересекаются с другими дорогами. Перекресток –
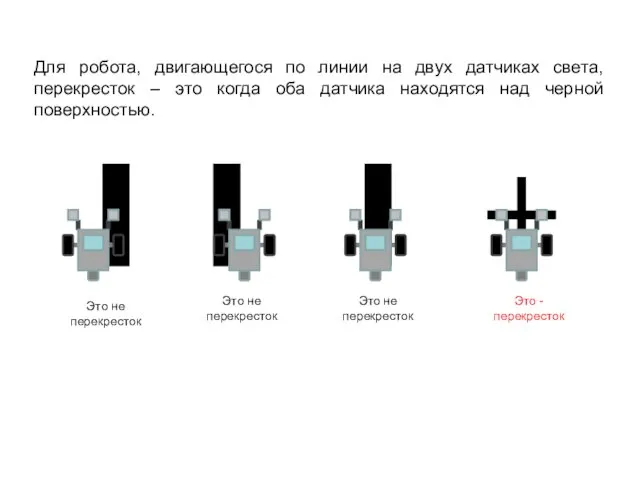
Для робота, двигающегося по линии на двух датчиках света, перекресток –
Для робота, двигающегося по линии на двух датчиках света, перекресток –

Проверку на одновременное определение черного цвета двумя датчиками лучше разместить в
Проверку на одновременное определение черного цвета двумя датчиками лучше разместить в

Случается, что перекресток необходимо проезжать, но при этом производить подсчёт перекрестков
Случается, что перекресток необходимо проезжать, но при этом производить подсчёт перекрестков
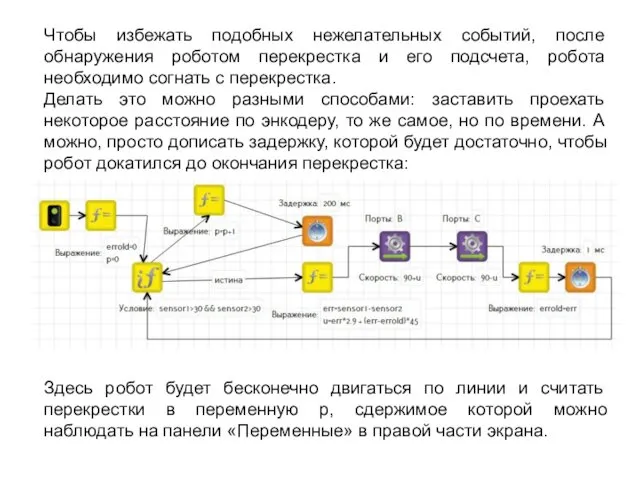
Чтобы избежать подобных нежелательных событий, после обнаружения роботом перекрестка и его
Чтобы избежать подобных нежелательных событий, после обнаружения роботом перекрестка и его

Это программа считает перекрестки при движении робота и останавливает его на
Это программа считает перекрестки при движении робота и останавливает его на
 Программа обучения бригад 3 ЛТП универсальный специалист по теме: Особенности технологий ШПД
Программа обучения бригад 3 ЛТП универсальный специалист по теме: Особенности технологий ШПД Delta Solutions. Company profile
Delta Solutions. Company profile Муниципальный марафон Современной школе - современная библиотека
Муниципальный марафон Современной школе - современная библиотека Исковое требование о возмещении ущерба, причиненного дорожно-транспортным происшествием. Пример
Исковое требование о возмещении ущерба, причиненного дорожно-транспортным происшествием. Пример Домашние животные. Безопасное поведение.
Домашние животные. Безопасное поведение. Основные понятия из теории надежности и задачи технической диагностики
Основные понятия из теории надежности и задачи технической диагностики Технологии производства биогумуса
Технологии производства биогумуса Пластическая и реконструктивная хирургия
Пластическая и реконструктивная хирургия Фартук
Фартук 20231210_ekstremumy
20231210_ekstremumy Массивы. Одномерные массивы
Массивы. Одномерные массивы Карл Павлович Брюллов
Карл Павлович Брюллов Сигналы оповещения об опасностях, порядок их доведения до населения и действия по ним работников организаций
Сигналы оповещения об опасностях, порядок их доведения до населения и действия по ним работников организаций Стеклянные строительные материалы и изделия
Стеклянные строительные материалы и изделия Экономические институты: собственность и предпринимательство
Экономические институты: собственность и предпринимательство Задачи на проценты
Задачи на проценты Преимущества Дом.ru
Преимущества Дом.ru Использование кластеров
Использование кластеров Военные угрозы
Военные угрозы Современные информационные технологии на железнодорожном транспорте
Современные информационные технологии на железнодорожном транспорте Природоохранные территории Свердловской области и Тавдинского района
Природоохранные территории Свердловской области и Тавдинского района Строительство социализма в СССР
Строительство социализма в СССР Маркетинговое исследование. Портрет покупателя г. Алматы
Маркетинговое исследование. Портрет покупателя г. Алматы Алгоритм выполнения задания
Алгоритм выполнения задания Педагогический проект : В гостях у сказки
Педагогический проект : В гостях у сказки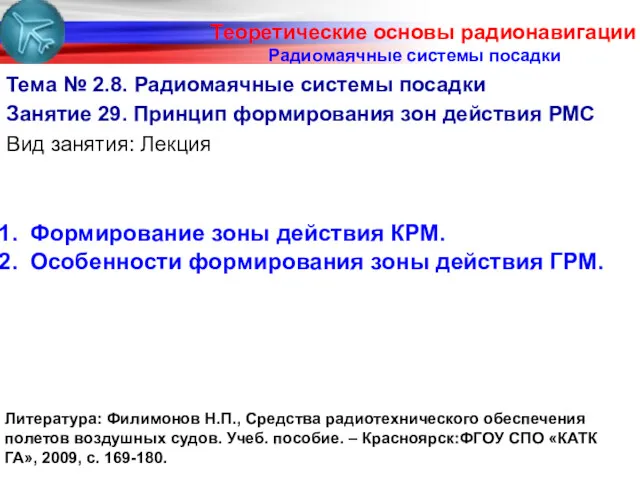 Принцип формирования зон действия РМС
Принцип формирования зон действия РМС Выполнение домашнего задания - залог успешной учебы
Выполнение домашнего задания - залог успешной учебы Шаблон для SP
Шаблон для SP