- Робототехника. Виды робототехники

Содержание
- 2. Робототехника - это (от робот и техника; англ. robotics) прикладная наука, занимающаяся разработкой автоматизированных технических систем.
- 3. Виды робототехники Строительная Промышленная Бытовая Авиационная Экстремальная Военная Космическая Подводная
- 4. С ДРЕВНОСТИ до XVI ВЕКА Середина III тыс. до н. э. Египтяне изобретают идею думающих машин:
- 5. История робототехники Механический театр в замке замке Хельбрунн (1750 – 1753)
- 6. В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем Карелом Чапеком для
- 7. История робототехники Карел Чапек (1890 – 1938) Пьеса Р.У.Р. – Россумские универсальные роботы (1920)
- 8. Премьерный показ пьесы
- 9. Робот это - (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое
- 10. Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «человек, мужчина» и суффикса -oid — от греч.
- 11. На рисунке 6 представлена общая статистика и тенденция численности роботов в мире. Рисунок 6 – Популяция
- 12. Рисунок 7 – Распределение промышленных роботов по странам за 2004 год.
- 13. Направления робототехники Промышленные роботы. Военные и космические роботы. Бытовые роботы. Андроиды.
- 14. Промышленные роботы
- 15. Военные и космические роботы
- 16. Бытовые роботы
- 17. Андроиды
- 19. Классы роботов: Манипуляционные Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности,
- 20. Манипулятор — это механизм для управления пространственным положением орудий и объектов труда. Манипуляционные роботы поступательное движение
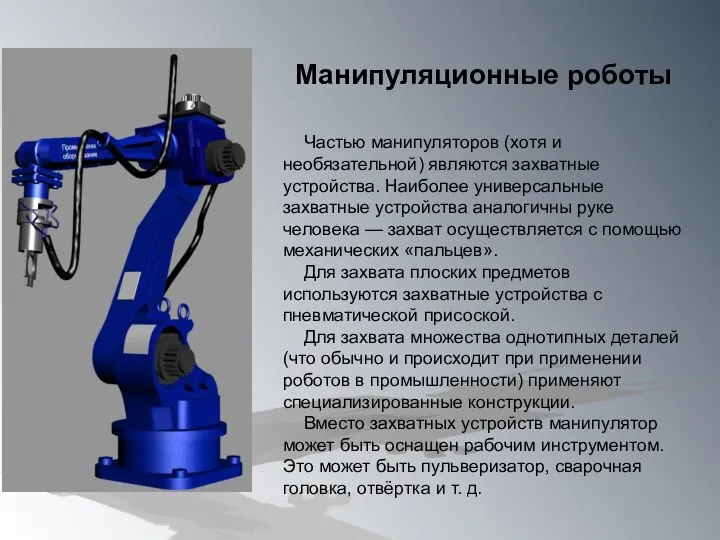
- 21. Манипуляционные роботы Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные захватные устройства аналогичны руке
- 22. Классы роботов: Мобильные Автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Колесные Шагающие
- 23. Классы роботов: Мобильные Ползающие Плавающие Летающие
- 24. Современные роботы ASIMO Асимо AIBO Айбо NAO (Нао)
- 25. Современные роботы
- 26. Компоненты роботов Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются
- 27. Приводы
- 28. Законы робототехники Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён
- 29. В 1986 году в романе Роботы и Империя (англ. Robots and Empire) Азимов предложил Нулевой Закон:
- 31. Скачать презентацию

Робототехника - это
(от робот и техника; англ. robotics) прикладная наука, занимающаяся
Робототехника - это
(от робот и техника; англ. robotics) прикладная наука, занимающаяся

Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная
Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная

С ДРЕВНОСТИ до XVI ВЕКА
Середина III тыс. до н. э.
Египтяне изобретают
С ДРЕВНОСТИ до XVI ВЕКА
Середина III тыс. до н. э.
Египтяне изобретают
История робототехники
Механический театр в замке замке Хельбрунн (1750 – 1753)
История робототехники
Механический театр в замке замке Хельбрунн (1750 – 1753)
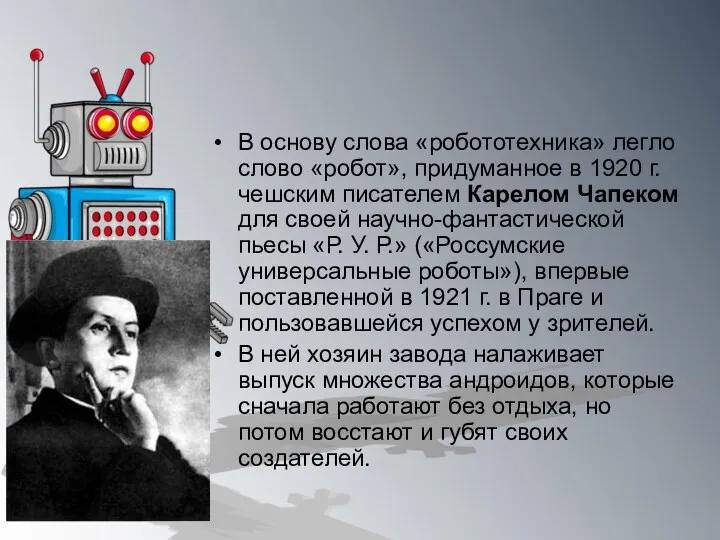
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г.
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г.

История робототехники
Карел Чапек (1890 – 1938)
Пьеса Р.У.Р. – Россумские универсальные роботы
История робототехники
Карел Чапек (1890 – 1938)
Пьеса Р.У.Р. – Россумские универсальные роботы
Премьерный показ пьесы
Премьерный показ пьесы
Робот это -
(чеш. robot, от robota — подневольный труд или
Робот это -
(чеш. robot, от robota — подневольный труд или

Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «человек, мужчина» и
Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «человек, мужчина» и

На рисунке 6 представлена общая статистика и тенденция численности роботов в
На рисунке 6 представлена общая статистика и тенденция численности роботов в
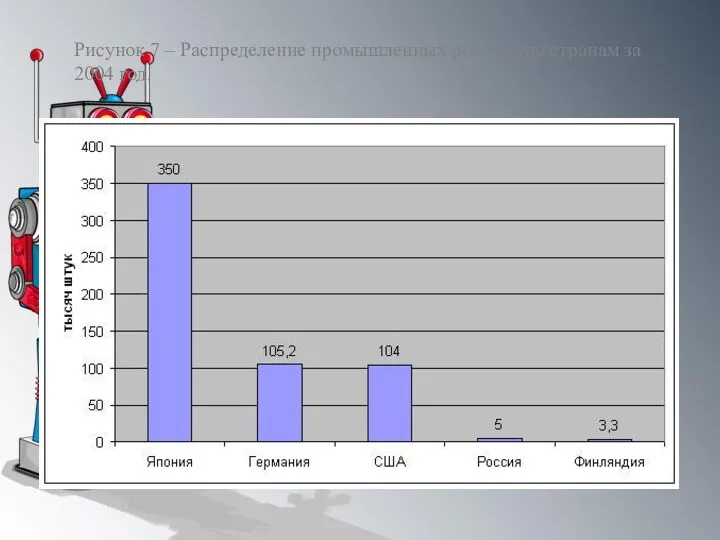
Рисунок 7 – Распределение промышленных роботов по странам за 2004 год.
Рисунок 7 – Распределение промышленных роботов по странам за 2004 год.

Направления робототехники
Промышленные роботы.
Военные и космические роботы.
Бытовые роботы.
Андроиды.
Направления робототехники
Промышленные роботы.
Военные и космические роботы.
Бытовые роботы.
Андроиды.

Промышленные роботы
Промышленные роботы

Военные и космические роботы
Военные и космические роботы

Бытовые роботы
Бытовые роботы

Андроиды
Андроиды

Классы роботов:
Манипуляционные
Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего
Классы роботов:
Манипуляционные
Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего

Манипулятор — это механизм для управления пространственным положением орудий и объектов
Манипулятор — это механизм для управления пространственным положением орудий и объектов
Манипуляционные роботы
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные
Манипуляционные роботы
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные

Классы роботов:
Мобильные
Автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми
Классы роботов:
Мобильные
Автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми

Классы роботов:
Мобильные
Ползающие
Плавающие
Летающие
Классы роботов:
Мобильные
Ползающие
Плавающие
Летающие

Современные роботы
ASIMO
Асимо
AIBO
Айбо
NAO (Нао)
Современные роботы
ASIMO
Асимо
AIBO
Айбо
NAO (Нао)

Современные роботы
Современные роботы
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными

Приводы
Приводы
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
В 1986 году в романе Роботы и Империя (англ. Robots and
В 1986 году в романе Роботы и Империя (англ. Robots and
 Амарант в сельском хозяйстве
Амарант в сельском хозяйстве Открытая форсайт-лаборатория старшеклассников. Будущее как вызов для образования
Открытая форсайт-лаборатория старшеклассников. Будущее как вызов для образования Принципиальная электрическая схема
Принципиальная электрическая схема презентация к уроку технологии Ёлка из модулей
презентация к уроку технологии Ёлка из модулей Роль туристских кадров в работе туристского учреждения
Роль туристских кадров в работе туристского учреждения Япония. Японская письменность
Япония. Японская письменность Электростатика (жалғасы)
Электростатика (жалғасы) Шинопровод
Шинопровод История развития сварки
История развития сварки Неметаллы: общая характеристика
Неметаллы: общая характеристика Географическое положение Африки
Географическое положение Африки Презентация логопедического занятия в старшей группе к лексической теме : Домашние животные и их детеныши
Презентация логопедического занятия в старшей группе к лексической теме : Домашние животные и их детеныши Чистохин Г.Д
Чистохин Г.Д Подарок маме своими руками
Подарок маме своими руками Clothes names
Clothes names Зникаючі рослини України
Зникаючі рослини України Сказуемое. Типы сказуемого. 10 класс
Сказуемое. Типы сказуемого. 10 класс Правила остановки кровотечений
Правила остановки кровотечений Урок в 10 классе Электронное и пространственное строение алканов
Урок в 10 классе Электронное и пространственное строение алканов Здравствуй, школа! (презентация)
Здравствуй, школа! (презентация) Фердинанд де Соссюр
Фердинанд де Соссюр Физические упражнения, рекомендуемые сочетать с силовыми упражнениями
Физические упражнения, рекомендуемые сочетать с силовыми упражнениями Онтология, как наука о бытии
Онтология, как наука о бытии Пяльма
Пяльма Процесс перемешивания. Механический, пневматический и гидравлический способы
Процесс перемешивания. Механический, пневматический и гидравлический способы Бройлерное кролиководство
Бройлерное кролиководство Царская семья - идеал любви и образец семейной жизни
Царская семья - идеал любви и образец семейной жизни Қиял. Сөйлеу
Қиял. Сөйлеу