- Синтез и анализ систем автоматического управления следящих систем на судах

Содержание
- 2. СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
- 3. Целью данной курсовой работы является приобретение навыков составления и преобразования структурных схем, синтеза систем автоматического управления
- 4. Морская интеллектуальная система (МИС) стабилизации качки судна (СКС) с помощью перекладки руля предназначена для уменьшения качки
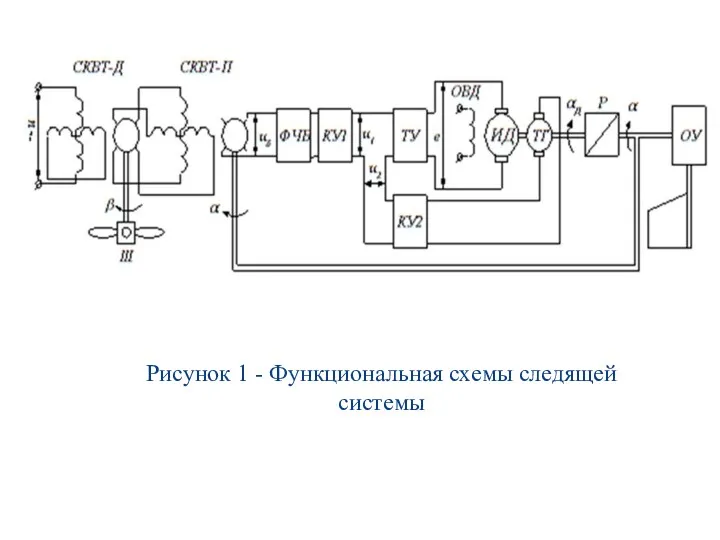
- 5. Рисунок 1 - Функциональная схемы следящей системы
- 6. 1.Описание СС с помощью ДУ
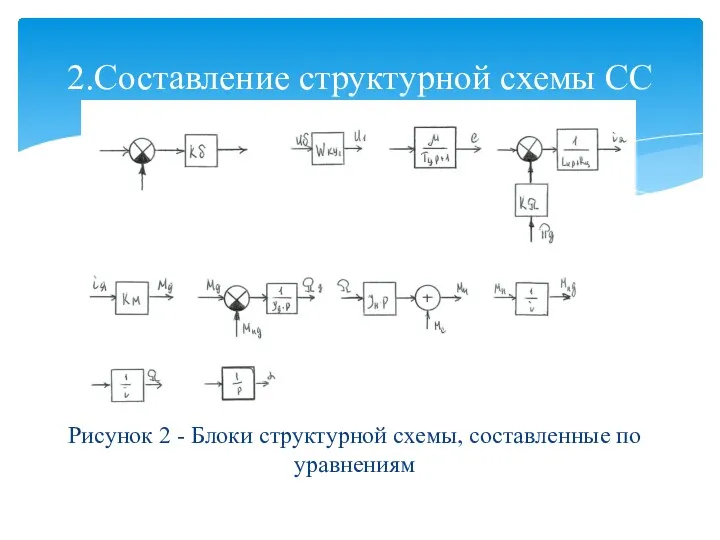
- 7. Рисунок 2 - Блоки структурной схемы, составленные по уравнениям 2.Составление структурной схемы СС
- 8. Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС. Проводим поэтапное сворачивание структурной схемы После
- 9. Рисунок 3 - ЛАЧХ 3. Построение ЛАЧХ неизменяемой части следящей системы
- 10. Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ , то корректирующего устройства не
- 11. 4. Расчет передаточной функции последовательного КУ1 Так как КУ1 соединен последовательно с неизменяемой частью СС, то
- 12. Схема КУ1 будет состоять из последовательно соединенных простейших блоков, каждый из которых реализует одну из простейших
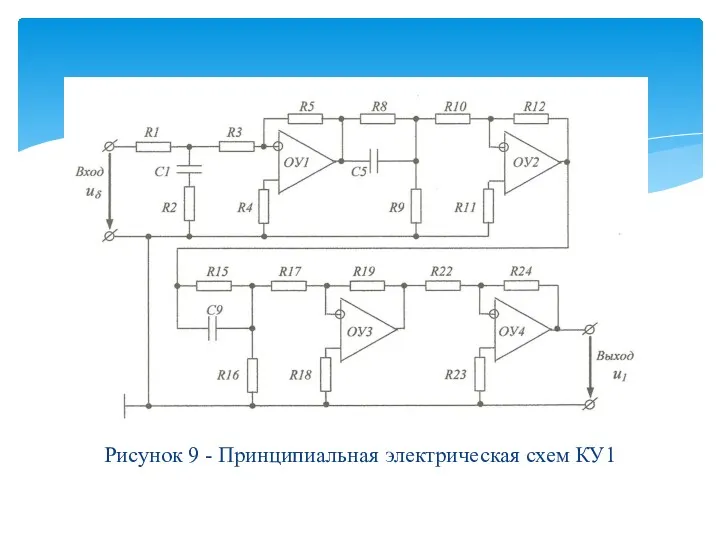
- 13. Рисунок 9 - Принципиальная электрическая схем КУ1
- 14. Выводы СС может нормально функционировать при введении только КУ1 . Общий коэффициент усиления схем на ОУ1…ОУ3
- 16. Скачать презентацию
СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
Целью данной курсовой работы является приобретение навыков составления и преобразования структурных схем, синтеза
Целью данной курсовой работы является приобретение навыков составления и преобразования структурных схем, синтеза
Морская интеллектуальная система (МИС) стабилизации качки судна (СКС) с помощью перекладки руля предназначена
Морская интеллектуальная система (МИС) стабилизации качки судна (СКС) с помощью перекладки руля предназначена
Рисунок 1 - Функциональная схемы следящей системы
Рисунок 1 - Функциональная схемы следящей системы
1.Описание СС с помощью ДУ
1.Описание СС с помощью ДУ
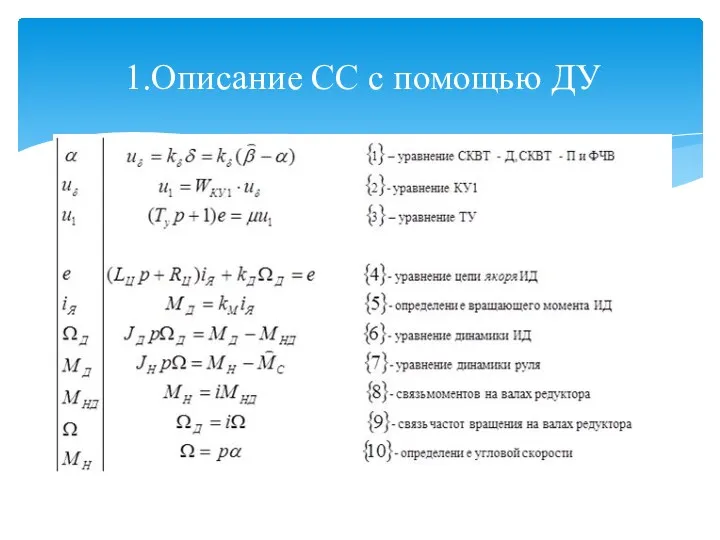
Рисунок 2 - Блоки структурной схемы, составленные по уравнениям
2.Составление структурной схемы СС
2.Составление структурной схемы СС
Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС.
Проводим поэтапное сворачивание структурной
Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС.
Проводим поэтапное сворачивание структурной
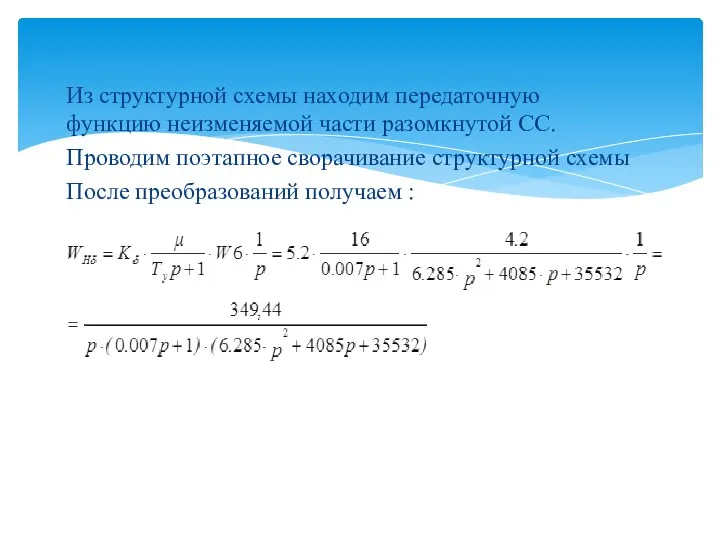
Рисунок 3 - ЛАЧХ
3. Построение ЛАЧХ неизменяемой части следящей системы
Рисунок 3 - ЛАЧХ
3. Построение ЛАЧХ неизменяемой части следящей системы
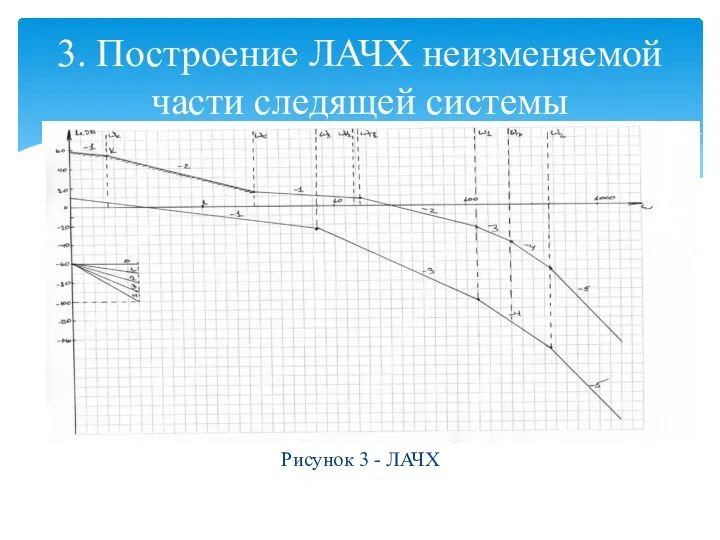
Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ , то
Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ , то
4. Расчет передаточной функции последовательного КУ1
Так как КУ1 соединен последовательно с неизменяемой частью
4. Расчет передаточной функции последовательного КУ1
Так как КУ1 соединен последовательно с неизменяемой частью
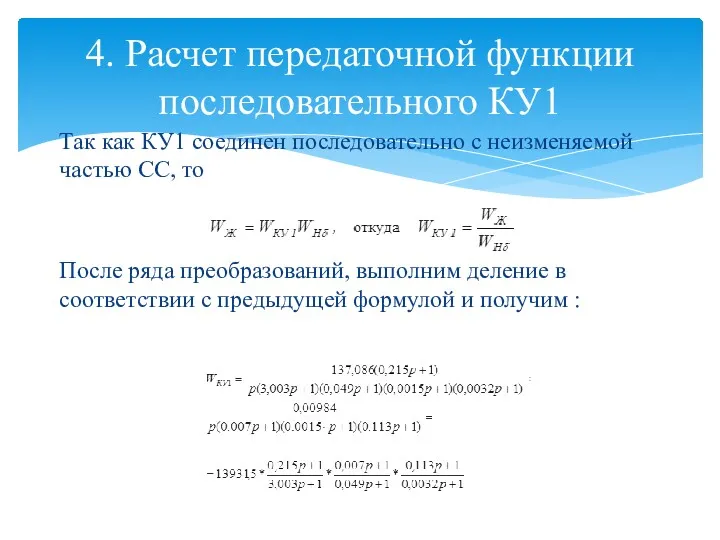
Схема КУ1 будет состоять из последовательно соединенных простейших блоков, каждый из которых реализует
Схема КУ1 будет состоять из последовательно соединенных простейших блоков, каждый из которых реализует
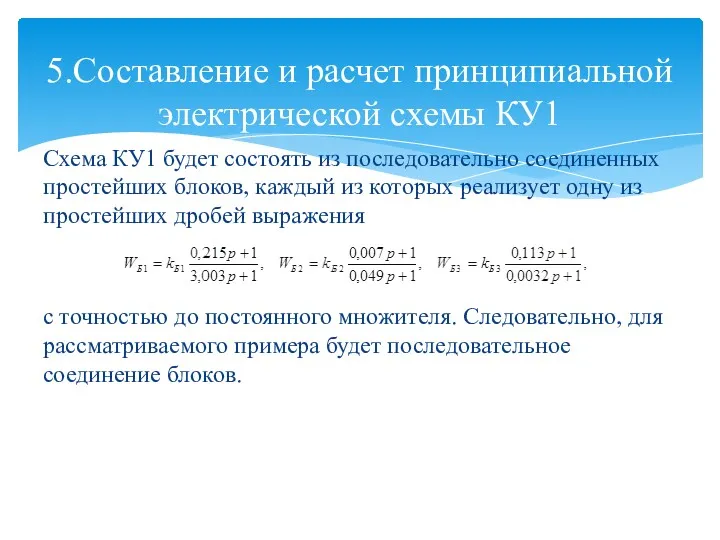
Рисунок 9 - Принципиальная электрическая схем КУ1
Рисунок 9 - Принципиальная электрическая схем КУ1
Выводы
СС может нормально функционировать при введении только КУ1 .
Общий коэффициент усиления схем
Выводы
СС может нормально функционировать при введении только КУ1 .
Общий коэффициент усиления схем
 Медикаментозное прерывание беременности
Медикаментозное прерывание беременности Пчеловодство в НСО
Пчеловодство в НСО През (ПЗ-3-1)
През (ПЗ-3-1) Бог нас любит
Бог нас любит Внешний вид курильщика
Внешний вид курильщика Электроника
Электроника Состав и структура экологических сообществ
Состав и структура экологических сообществ Как сохранить витамины в продуктах при приготовлении пищи
Как сохранить витамины в продуктах при приготовлении пищи Здоровая молодежь – здоровое общество
Здоровая молодежь – здоровое общество Строение и функции белков
Строение и функции белков Бухгалтерский учет операций по выдаче (размещению) денежных средств по договорам займа и банковского вклада. Глава 4
Бухгалтерский учет операций по выдаче (размещению) денежных средств по договорам займа и банковского вклада. Глава 4 Бородинская битва
Бородинская битва ТРЕНАЖЕРНО- ИНФОРМАЦИОННАЯ СИСТЕМА ТИСА В ШКОЛЬНОЙ ПРОГРАММЕ НА УРОКАХ ЛФК
ТРЕНАЖЕРНО- ИНФОРМАЦИОННАЯ СИСТЕМА ТИСА В ШКОЛЬНОЙ ПРОГРАММЕ НА УРОКАХ ЛФК Организация ТО и ремонта автомобиля VOLVO-FE 320
Организация ТО и ремонта автомобиля VOLVO-FE 320 Заготовка силоса
Заготовка силоса Интерактивная игра Овощи
Интерактивная игра Овощи Неделя химии в школе
Неделя химии в школе Тезаурус по теме Безопасный интернет
Тезаурус по теме Безопасный интернет Динамическое проектирование систем стабилизации летательных аппаратов. Аналоговые устройства
Динамическое проектирование систем стабилизации летательных аппаратов. Аналоговые устройства Совет молодых специалистов
Совет молодых специалистов Постепенные рубки
Постепенные рубки Южная Америка. Население
Южная Америка. Население Химический элемент Кремний
Химический элемент Кремний Засади конституційного ладу
Засади конституційного ладу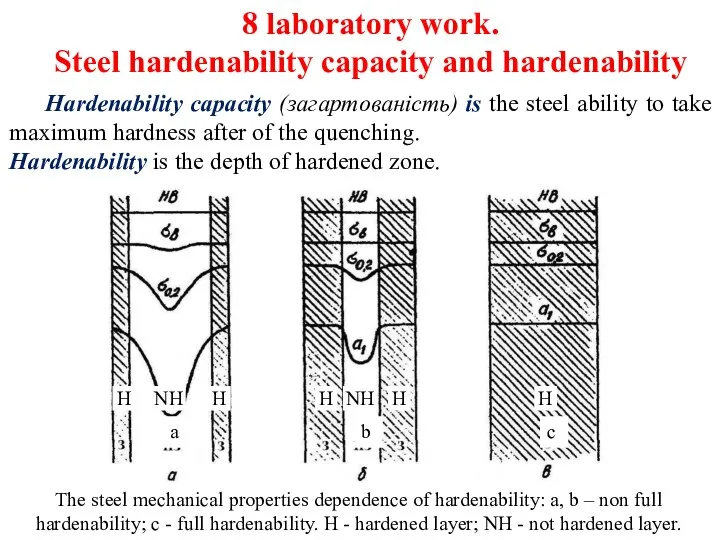 Steel hardenability capacity and hardenability
Steel hardenability capacity and hardenability Качественные методы психологии в профессиональной деятельности психолога
Качественные методы психологии в профессиональной деятельности психолога Убранство русской избы
Убранство русской избы Профориентация. Адаптация персонала. Организация обучения. Тема № 4
Профориентация. Адаптация персонала. Организация обучения. Тема № 4