Динамическое проектирование систем стабилизации летательных аппаратов. Аналоговые устройства презентация
- Динамическое проектирование систем стабилизации летательных аппаратов. Аналоговые устройства

Содержание
- 2. КЛАССИФИКАЦИЯ АНАЛОГОВЫХ УПУ
- 3. КЛАССИФИКАЦИЯ УСИЛИТЕЛЕЙ
- 4. ОБЩИЕ ХАРАКТЕРИСТИКИ Uвых = kUВХ К - Коэффициент усиления f – полоса пропускания Нелинейные искажения Шумы
- 5. ХАРАКТЕРИСТИКИ УСИЛИТЕЛЕЙ Амплитудно-частотная характеристика Амплитудная характеристика
- 6. РЕЛЕЙНЫЕ УСИЛИТЕЛИ Характеристики релейных усилителей: а — характеристика с гистерезисной петлей; б—характеристика с гистерезисной петлей и
- 7. СХЕМЫ РЕЛЕЙНЫХ УСИЛИТЕЛЕЙ Схема релейного усилителя Схема релейного усилителя с вибрационной линеаризацией
- 8. МАГНИТНЫЙ УСИЛИТЕЛЬ Схемы однотактных магнитных усилителей без обратной связи с последовательным (а) и параллельным (б) включением
- 9. ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ
- 10. ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ Принципиальная схема релейного усилителя: Uб.Rб - базовые напряжение и сопротивление; Uk - напряжение на
- 11. ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ Схема двухконтактного усилителя постоянного тока с компенсацией температурного дрейфа нуля
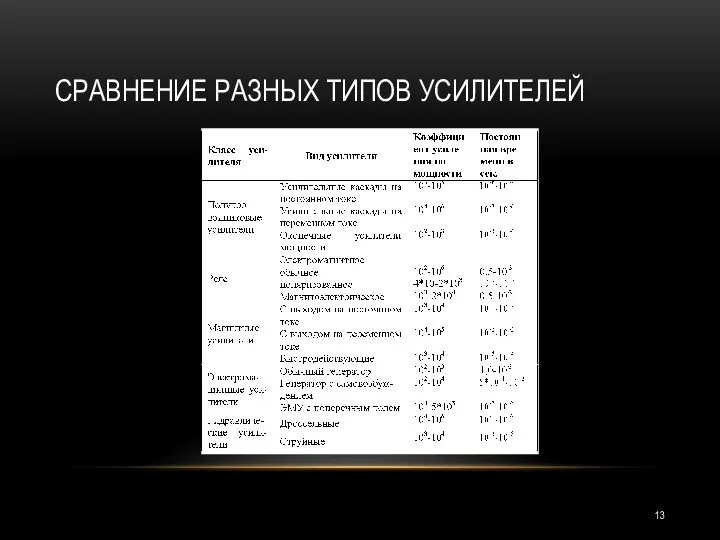
- 12. СРАВНЕНИЕ РАЗНЫХ ТИПОВ УСИЛИТЕЛЕЙ
- 13. СРАВНЕНИЕ РАЗНЫХ ТИПОВ УСИЛИТЕЛЕЙ
- 14. Вычислительные устройства
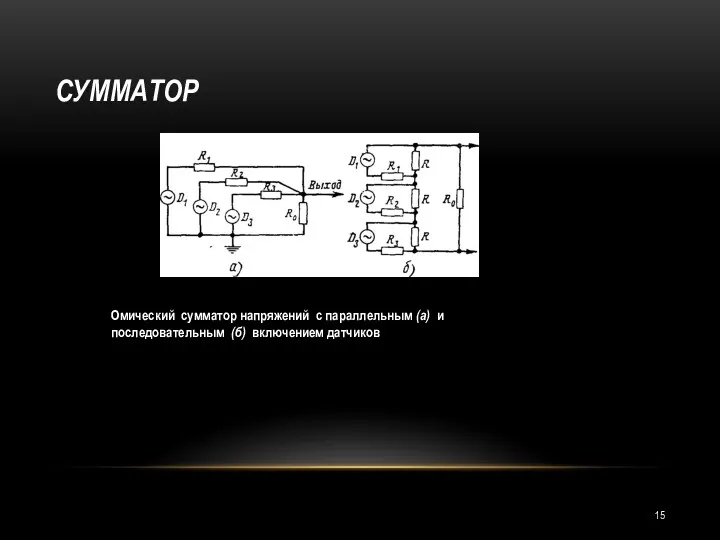
- 15. СУММАТОР Омический сумматор напряжений с параллельным (а) и последовательным (б) включением датчиков
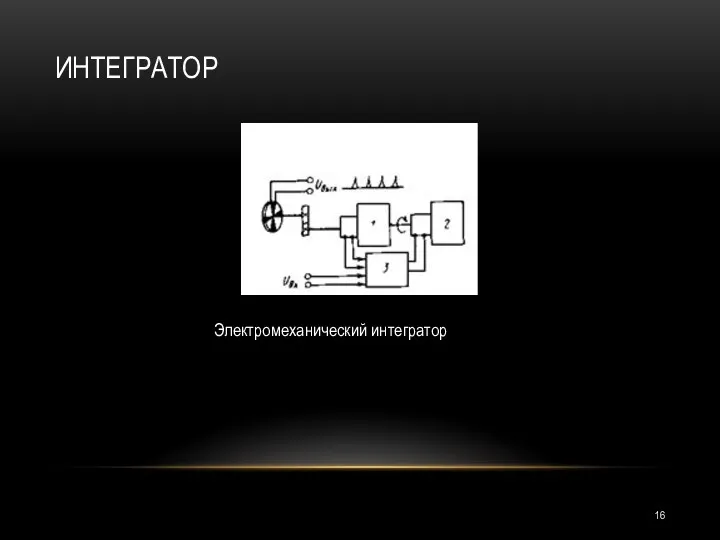
- 16. ИНТЕГРАТОР Электромеханический интегратор
- 17. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА Интегрирующий RC-контур дифференцирующий RС-контур первого порядка дифференцирующий контур с пропорциональной составляющей 1 и 2
- 18. ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ Диодная схема «ИЛИ» Схема «ИЛИ» на транзисторах Диодная схема типа «И» Схема типа «И»
- 19. ТРИГГЕРЫ
- 20. 2.2.2 Цифровые элементы систем стабилизации
- 21. БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА Аппаратное обеспечение Электронные блоки Кабельная сеть Программное обеспечение Служебное ПО Функциональное ПО
- 22. БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА Быстродействие Разрядность Система команд Объем ОЗУ Объем РПЗУ Типы интерфейсов Надежность!
- 23. БЦВМ МОКБ МАРС
- 24. I8XC196KC (1874ВЕ05Т)
- 25. МИКРОПРОЦЕССОР 1892ВМ12Т
- 26. ЗАРУБЕЖНЫЕ МИКРОПРОЦЕССОРЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ
- 27. ОЦЕНКА БЫСТРОДЕЙСТВИЯ БЦВМ смесь Гибсона, для типа ЭВМ с плавающей запятой: Команда % в смеси Запись
- 28. СХЕМЫ РЕЗЕРВИРОВАНИЯ БЦВМ Дублированная схема БЦВМ Схема троированной БЦВМ с мажоритированием Схема четырехкратного резервирования БЦВМ
- 29. УСТРОЙСТВА ВВОДА-ВЫВОДА: ЦИФРОВЫЕ Эталонная модель взаимодействия открытых систем(OSI): 7. Прикладной уровень 6. Представительский уровень 5. Сеансовый
- 30. УСТРОЙСТВА СОПРЯЖЕНИЯ – ЦИФРОВЫЕ ИНТЕРФЕЙСЫ Предназначен для организации межсистемного обмена информацией на основе радиальных линий передачи
- 31. МУЛЬТИПЛЕКСНЫЙ КАНАЛ МЕЖМОДУЛЬНОГО ОБМЕНА ИНФОРМАЦИЕЙ ПО ГОСТ 26765.52-87 (MIL-STD-1553B) Предназначен для организации на основе линий с
- 32. СТАНДАРТ SPACEWIRE Обобщенная структура сети SpaceWire Узел SpaceWire Разъем D-типа
- 33. SPACEWIRE В СОСТАВЕ БКУ КА MERCURY PLANETARY OBSERVER
- 34. УСТРОЙСТВА ВВОДА-ВЫВОДА ДИСКРЕТНЫХ СИГНАЛОВ (БЛОКИ СИЛОВОЙ АВТОМАТИКИ) Фрагмент тракта выдачи разовой команды ->
- 35. УСТРОЙСТВА ВВОДА: АЦП ГИ – генератор имрульсов ДЧ- делитель частоты ГПН – генератор пилообразного напряжения В-
- 36. ХАРАКТЕРИСТИКИ АЦП Wацп=z-1 Tц, N
- 37. ПРЕОБРАЗОВАТЕЛИ УГОЛ-КОД
- 38. УСТРОЙСТВА ВЫВОДА - ПРЕОБРАЗОВАТЕЛИ КОД-НАПРЯЖЕНИЕ «Лестничная» схема преобразования параллельного кода в напряжение
- 39. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ Служебное ПО Функциональное ПО
- 40. НЕКОТОРЫЕ ПРИНЦИПЫ РАЗРАБОТКИ ПО Модульность Иерархичность Системность Формализация требований Унификация архитектуры Стандартизация принципов разработки
- 41. V-МОДЕЛЬ РАЗРАБОТКИ ПО
- 42. ОБЪЕМ БПО ПРОЕКТОВ NASA NCSL = Non-Comment Source Lines 1969 Mariner-6 (30) 1975 Viking (5K) 1977
- 43. РОЛЬ БПО В БОЕВЫХ САМОЛЕТАХ
- 44. ОБЪЕМ БПО РАЗНЫХ ИЗДЕЛИЙ
- 45. ЗАРУБЕЖНАЯ КЛАССИФИКАЦИЯ ПО
- 47. ОПЕРАЦИОННЫЕ СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ Сертификация Доступность исходного кода мультизадачность Время реакции на события Время перезагрузки Наличие
- 49. Скачать презентацию
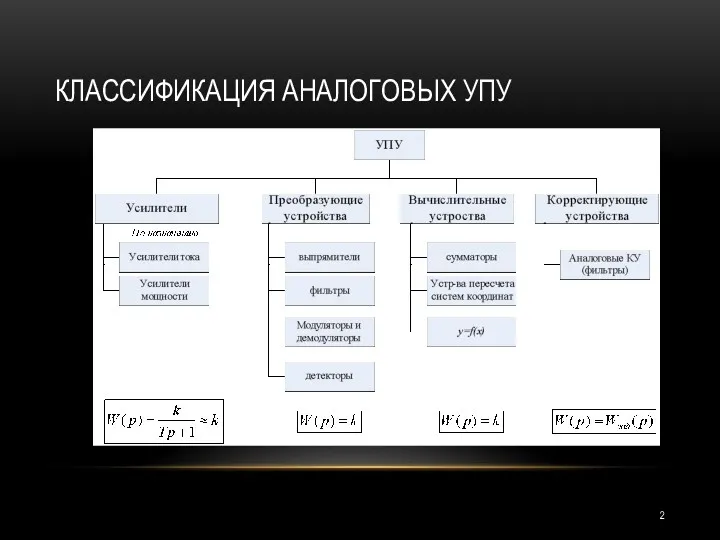
КЛАССИФИКАЦИЯ АНАЛОГОВЫХ УПУ
КЛАССИФИКАЦИЯ АНАЛОГОВЫХ УПУ

КЛАССИФИКАЦИЯ УСИЛИТЕЛЕЙ
КЛАССИФИКАЦИЯ УСИЛИТЕЛЕЙ
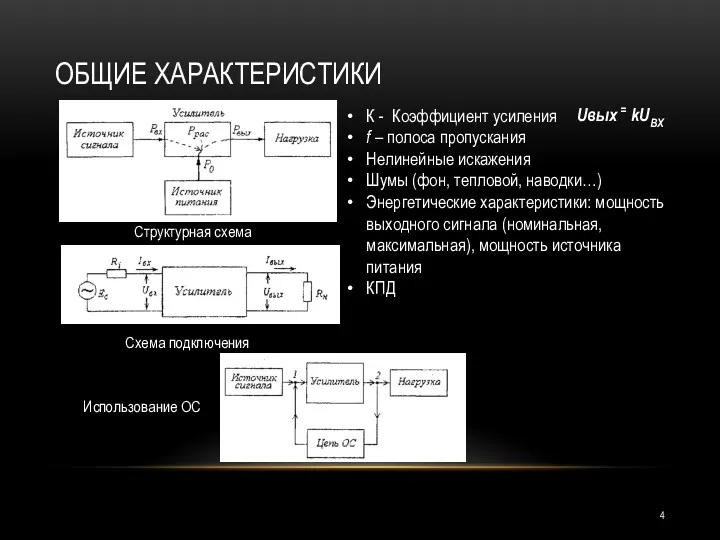
ОБЩИЕ ХАРАКТЕРИСТИКИ
Uвых = kUВХ
К - Коэффициент усиления
f – полоса пропускания
Нелинейные искажения
Шумы
ОБЩИЕ ХАРАКТЕРИСТИКИ
Uвых = kUВХ
К - Коэффициент усиления
f – полоса пропускания
Нелинейные искажения
Шумы
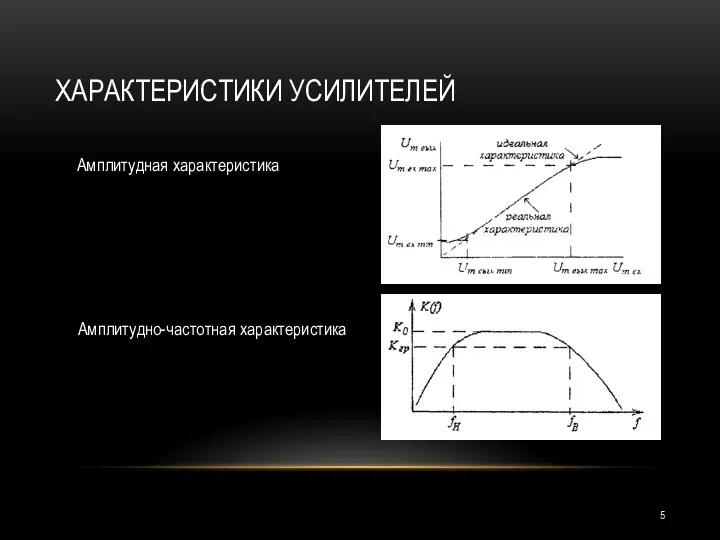
ХАРАКТЕРИСТИКИ УСИЛИТЕЛЕЙ
Амплитудно-частотная характеристика
Амплитудная характеристика
ХАРАКТЕРИСТИКИ УСИЛИТЕЛЕЙ
Амплитудно-частотная характеристика
Амплитудная характеристика

РЕЛЕЙНЫЕ УСИЛИТЕЛИ
Характеристики релейных усилителей:
а — характеристика с гистерезисной петлей;
РЕЛЕЙНЫЕ УСИЛИТЕЛИ
Характеристики релейных усилителей:
а — характеристика с гистерезисной петлей;
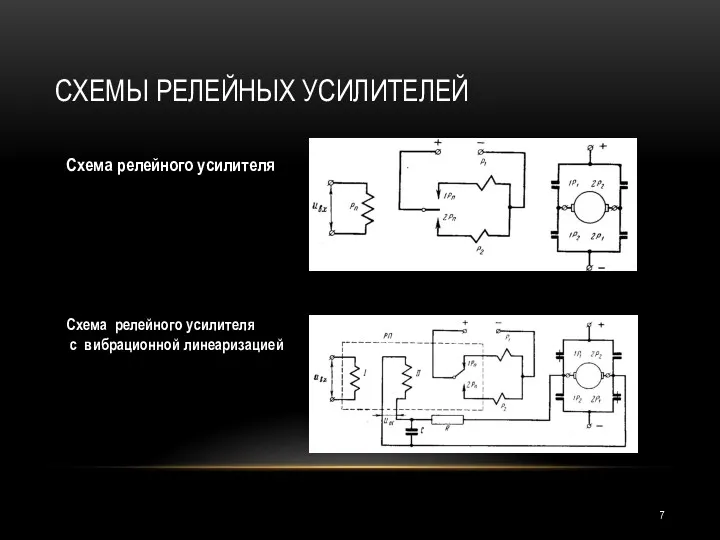
СХЕМЫ РЕЛЕЙНЫХ УСИЛИТЕЛЕЙ
Схема релейного усилителя
Схема релейного усилителя
с вибрационной линеаризацией
СХЕМЫ РЕЛЕЙНЫХ УСИЛИТЕЛЕЙ
Схема релейного усилителя
Схема релейного усилителя
с вибрационной линеаризацией
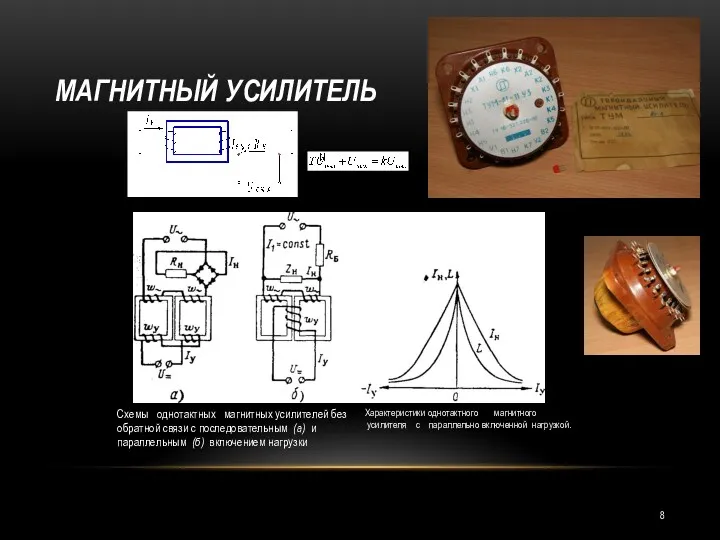
МАГНИТНЫЙ УСИЛИТЕЛЬ
Схемы однотактных магнитных усилителей без обратной связи с последовательным
МАГНИТНЫЙ УСИЛИТЕЛЬ
Схемы однотактных магнитных усилителей без обратной связи с последовательным

ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ
ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ
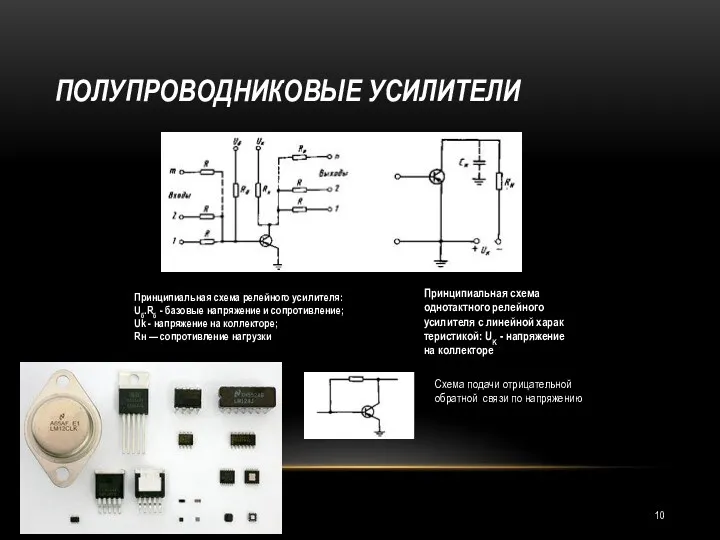
ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ
Принципиальная схема релейного усилителя:
Uб.Rб - базовые напряжение и сопротивление;
Uk
ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ
Принципиальная схема релейного усилителя:
Uб.Rб - базовые напряжение и сопротивление;
Uk
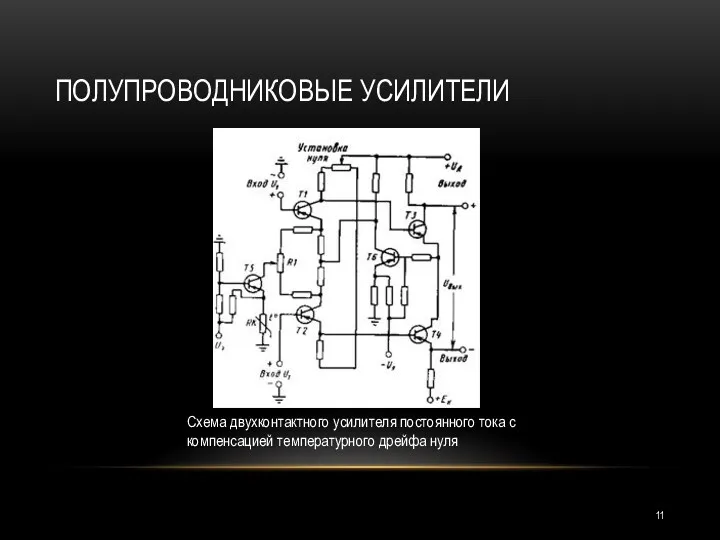
ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ
Схема двухконтактного усилителя постоянного тока с компенсацией температурного дрейфа нуля
ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ
Схема двухконтактного усилителя постоянного тока с компенсацией температурного дрейфа нуля
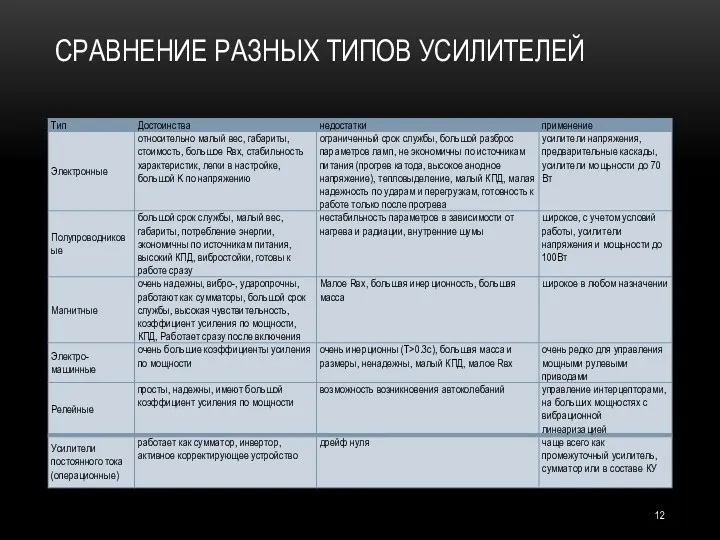
СРАВНЕНИЕ РАЗНЫХ ТИПОВ УСИЛИТЕЛЕЙ
СРАВНЕНИЕ РАЗНЫХ ТИПОВ УСИЛИТЕЛЕЙ
СРАВНЕНИЕ РАЗНЫХ ТИПОВ УСИЛИТЕЛЕЙ
СРАВНЕНИЕ РАЗНЫХ ТИПОВ УСИЛИТЕЛЕЙ
Вычислительные устройства
Вычислительные устройства
СУММАТОР
Омический сумматор напряжений с параллельным (а) и последовательным (б) включением датчиков
СУММАТОР
Омический сумматор напряжений с параллельным (а) и последовательным (б) включением датчиков
ИНТЕГРАТОР
Электромеханический интегратор
ИНТЕГРАТОР
Электромеханический интегратор
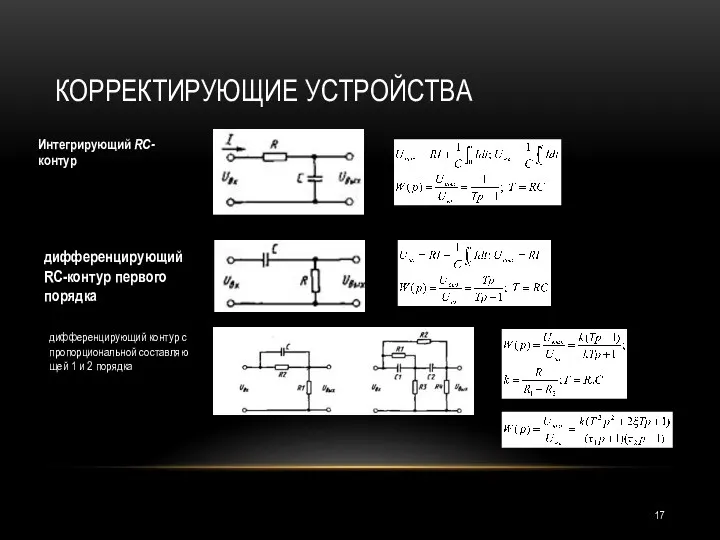
КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
Интегрирующий RC-контур
дифференцирующий RС-контур первого порядка
дифференцирующий контур с пропорциональной составляющей 1
КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
Интегрирующий RC-контур
дифференцирующий RС-контур первого порядка
дифференцирующий контур с пропорциональной составляющей 1
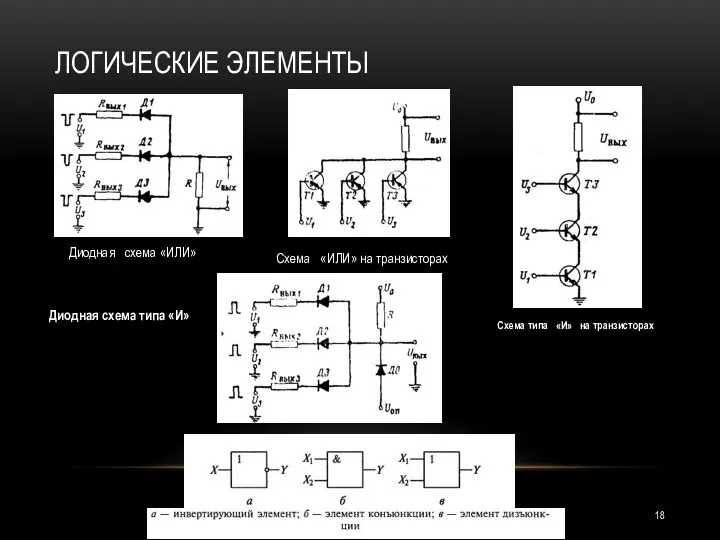
ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
Диодная схема «ИЛИ»
Схема «ИЛИ» на транзисторах
Диодная схема типа «И»
Схема типа
ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
Диодная схема «ИЛИ»
Схема «ИЛИ» на транзисторах
Диодная схема типа «И»
Схема типа
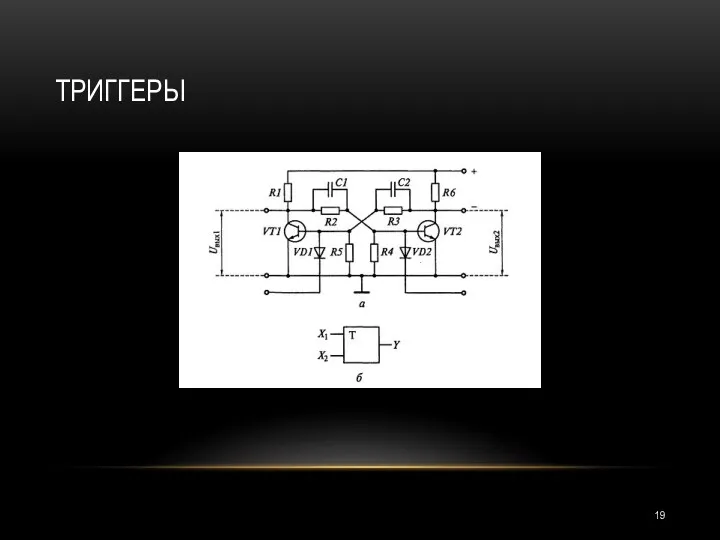
ТРИГГЕРЫ
ТРИГГЕРЫ
2.2.2 Цифровые элементы систем стабилизации
2.2.2 Цифровые элементы систем стабилизации
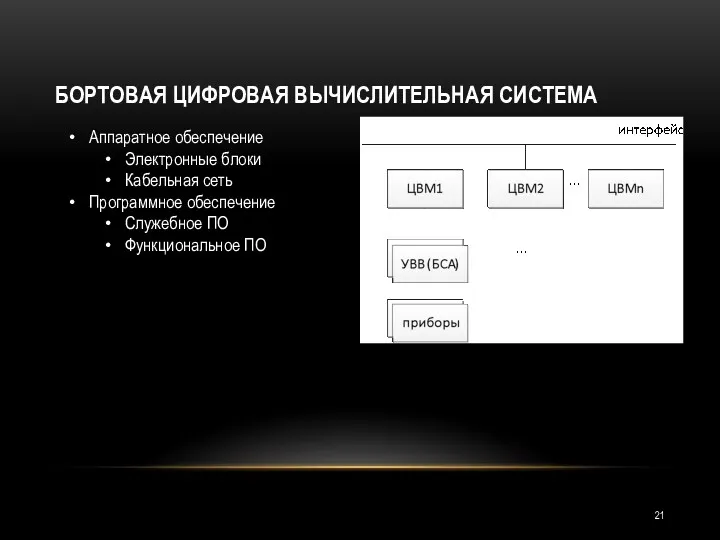
БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА
Аппаратное обеспечение
Электронные блоки
Кабельная сеть
Программное обеспечение
Служебное ПО
Функциональное ПО
БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА
Аппаратное обеспечение
Электронные блоки
Кабельная сеть
Программное обеспечение
Служебное ПО
Функциональное ПО
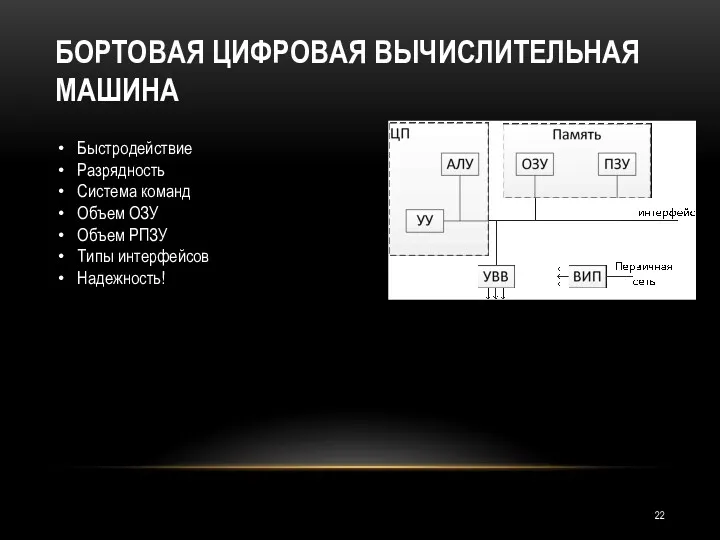
БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА
Быстродействие
Разрядность
Система команд
Объем ОЗУ
Объем РПЗУ
Типы интерфейсов
Надежность!
БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА
Быстродействие
Разрядность
Система команд
Объем ОЗУ
Объем РПЗУ
Типы интерфейсов
Надежность!
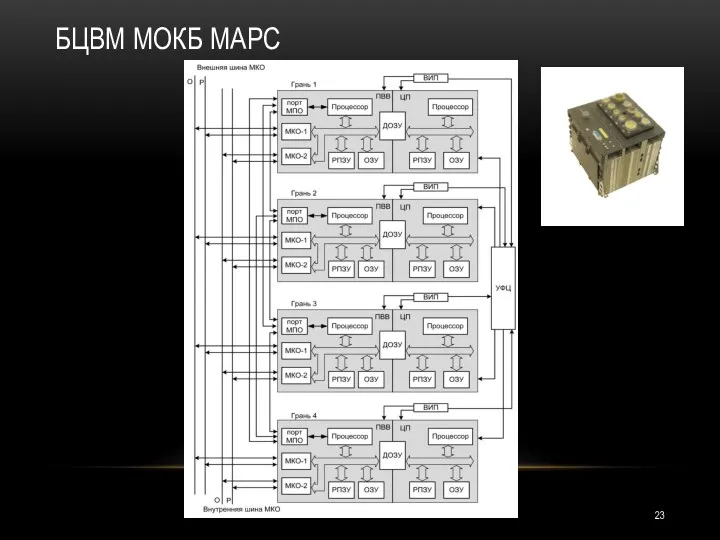
БЦВМ МОКБ МАРС
БЦВМ МОКБ МАРС
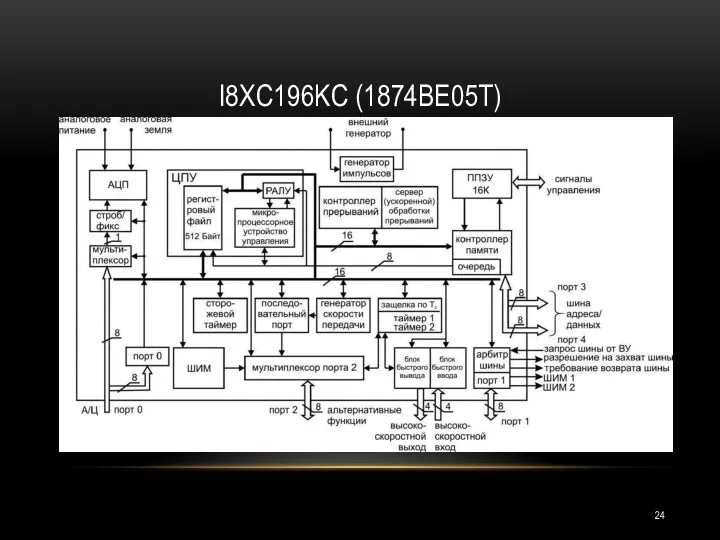
I8XC196KC (1874ВЕ05Т)
I8XC196KC (1874ВЕ05Т)
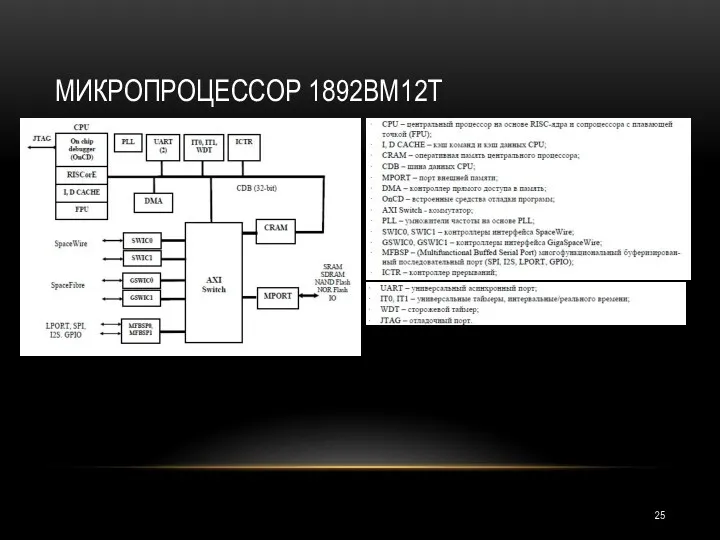
МИКРОПРОЦЕССОР 1892ВМ12Т
МИКРОПРОЦЕССОР 1892ВМ12Т
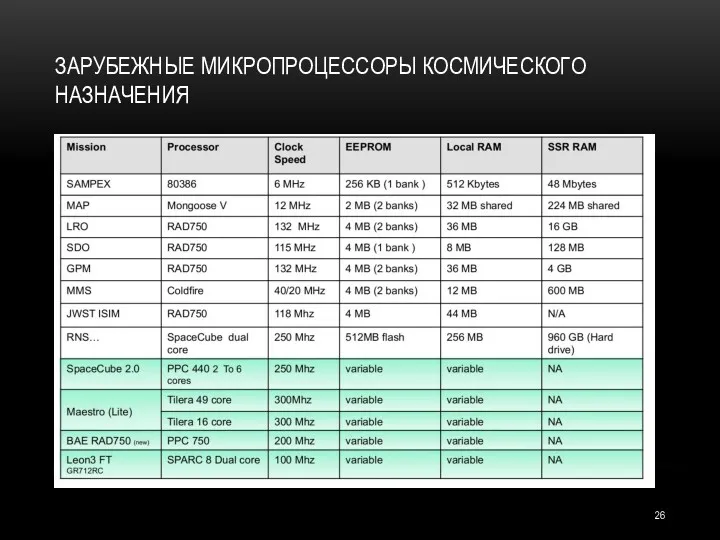
ЗАРУБЕЖНЫЕ МИКРОПРОЦЕССОРЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ
ЗАРУБЕЖНЫЕ МИКРОПРОЦЕССОРЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ
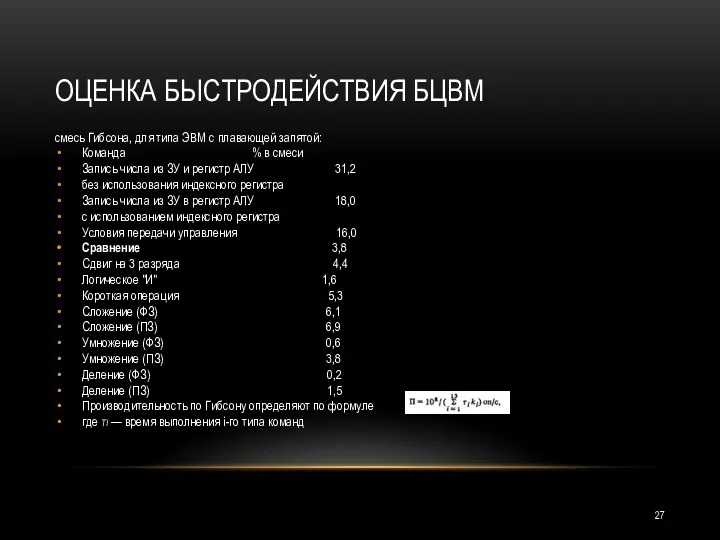
ОЦЕНКА БЫСТРОДЕЙСТВИЯ БЦВМ
смесь Гибсона, для типа ЭВМ с плавающей запятой:
Команда
ОЦЕНКА БЫСТРОДЕЙСТВИЯ БЦВМ
смесь Гибсона, для типа ЭВМ с плавающей запятой:
Команда

СХЕМЫ РЕЗЕРВИРОВАНИЯ БЦВМ
Дублированная схема БЦВМ
Схема троированной БЦВМ с мажоритированием
Схема четырехкратного резервирования
СХЕМЫ РЕЗЕРВИРОВАНИЯ БЦВМ
Дублированная схема БЦВМ
Схема троированной БЦВМ с мажоритированием
Схема четырехкратного резервирования
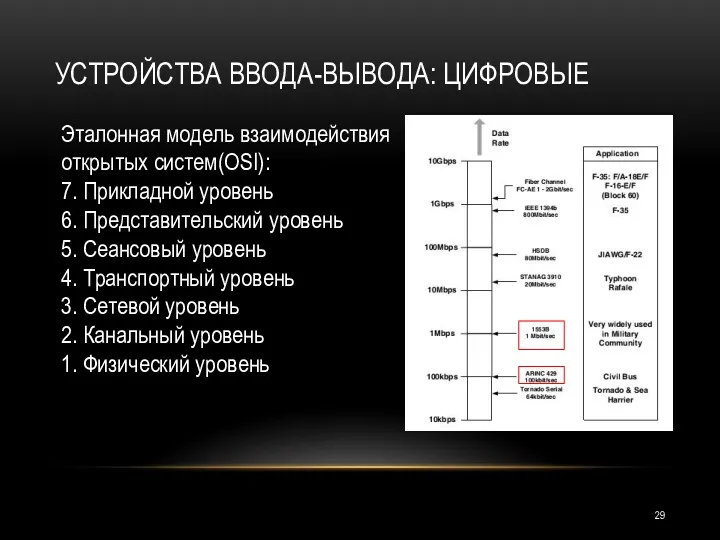
УСТРОЙСТВА ВВОДА-ВЫВОДА: ЦИФРОВЫЕ
Эталонная модель взаимодействия открытых систем(OSI):
7. Прикладной уровень
6. Представительский уровень
5.
УСТРОЙСТВА ВВОДА-ВЫВОДА: ЦИФРОВЫЕ
Эталонная модель взаимодействия открытых систем(OSI):
7. Прикладной уровень
6. Представительский уровень
5.
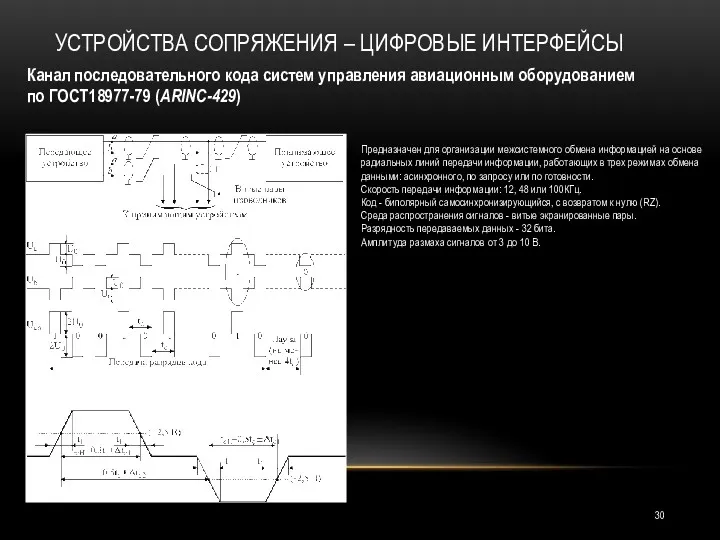
УСТРОЙСТВА СОПРЯЖЕНИЯ – ЦИФРОВЫЕ ИНТЕРФЕЙСЫ
Предназначен для организации межсистемного обмена информацией на
УСТРОЙСТВА СОПРЯЖЕНИЯ – ЦИФРОВЫЕ ИНТЕРФЕЙСЫ
Предназначен для организации межсистемного обмена информацией на
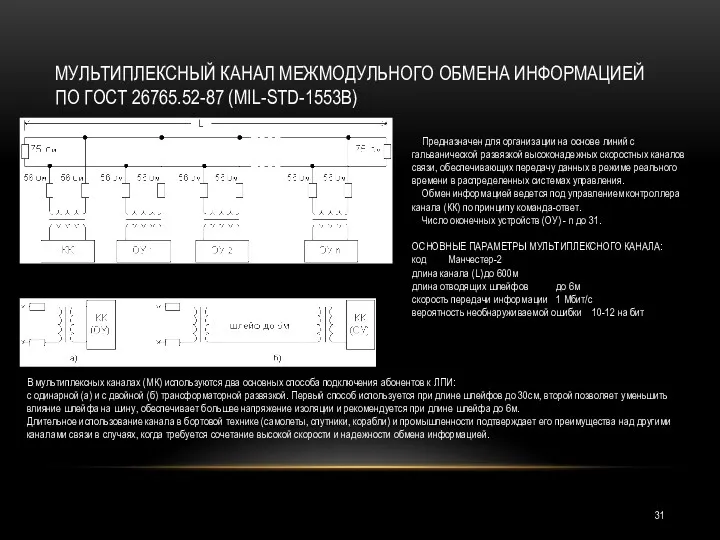
МУЛЬТИПЛЕКСНЫЙ КАНАЛ МЕЖМОДУЛЬНОГО ОБМЕНА ИНФОРМАЦИЕЙ
ПО ГОСТ 26765.52-87 (MIL-STD-1553B)
Предназначен для организации
МУЛЬТИПЛЕКСНЫЙ КАНАЛ МЕЖМОДУЛЬНОГО ОБМЕНА ИНФОРМАЦИЕЙ
ПО ГОСТ 26765.52-87 (MIL-STD-1553B)
Предназначен для организации
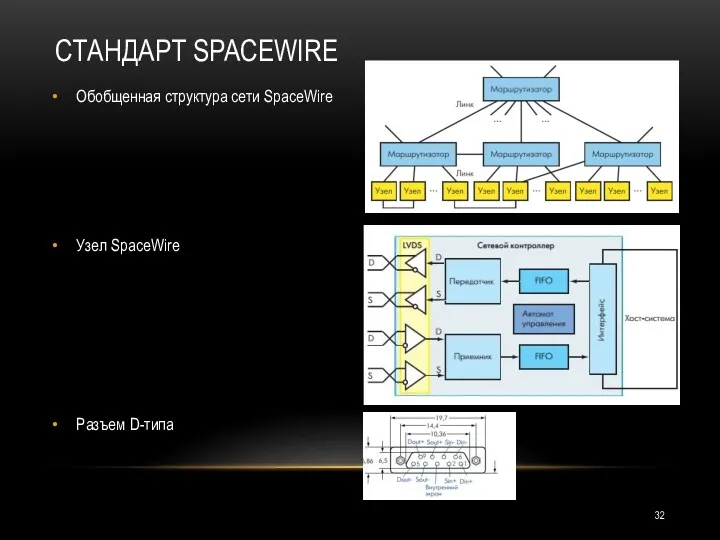
СТАНДАРТ SPACEWIRE
Обобщенная структура сети SpaceWire
Узел SpaceWire
Разъем D-типа
СТАНДАРТ SPACEWIRE
Обобщенная структура сети SpaceWire
Узел SpaceWire
Разъем D-типа
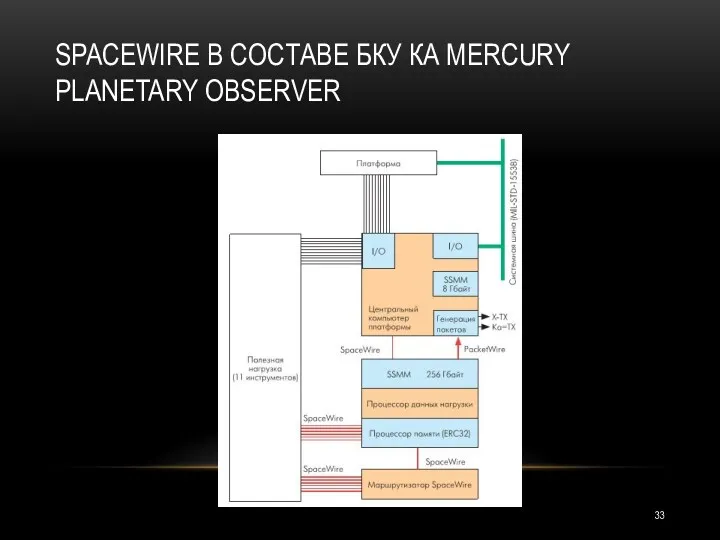
SPACEWIRE В СОСТАВЕ БКУ КА MERCURY PLANETARY OBSERVER
SPACEWIRE В СОСТАВЕ БКУ КА MERCURY PLANETARY OBSERVER

УСТРОЙСТВА ВВОДА-ВЫВОДА
ДИСКРЕТНЫХ СИГНАЛОВ
(БЛОКИ СИЛОВОЙ АВТОМАТИКИ)
Фрагмент тракта выдачи разовой команды ->
<-
УСТРОЙСТВА ВВОДА-ВЫВОДА
ДИСКРЕТНЫХ СИГНАЛОВ
(БЛОКИ СИЛОВОЙ АВТОМАТИКИ)
Фрагмент тракта выдачи разовой команды ->
<-
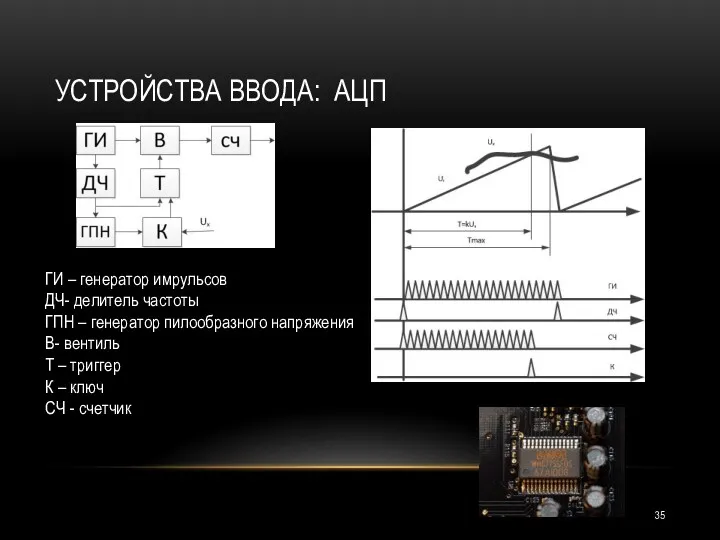
УСТРОЙСТВА ВВОДА: АЦП
ГИ – генератор имрульсов
ДЧ- делитель частоты
ГПН – генератор пилообразного
УСТРОЙСТВА ВВОДА: АЦП
ГИ – генератор имрульсов
ДЧ- делитель частоты
ГПН – генератор пилообразного
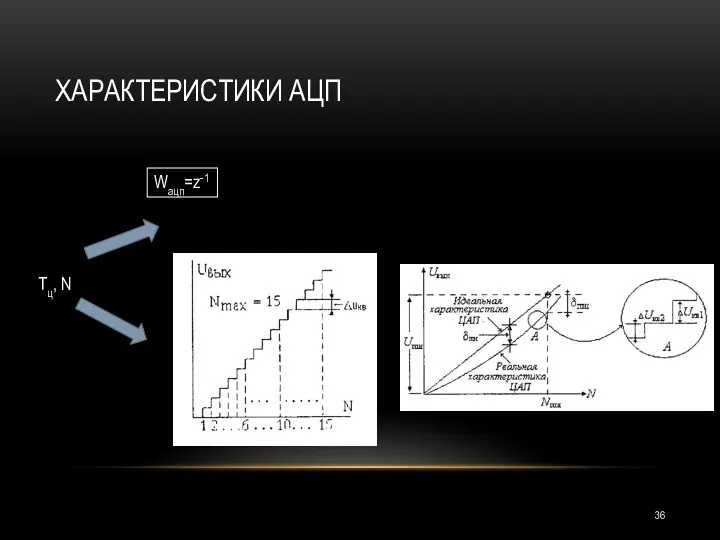
ХАРАКТЕРИСТИКИ АЦП
Wацп=z-1
Tц, N
ХАРАКТЕРИСТИКИ АЦП
Wацп=z-1
Tц, N
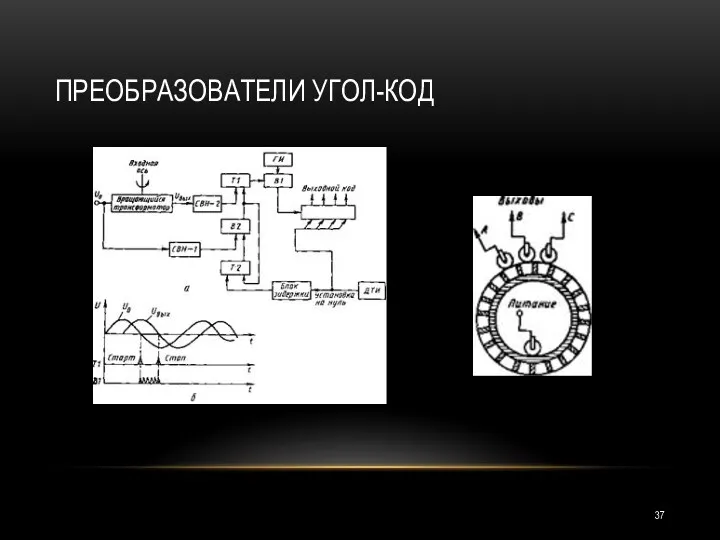
ПРЕОБРАЗОВАТЕЛИ УГОЛ-КОД
ПРЕОБРАЗОВАТЕЛИ УГОЛ-КОД

УСТРОЙСТВА ВЫВОДА - ПРЕОБРАЗОВАТЕЛИ КОД-НАПРЯЖЕНИЕ
«Лестничная» схема преобразования параллельного кода в напряжение
УСТРОЙСТВА ВЫВОДА - ПРЕОБРАЗОВАТЕЛИ КОД-НАПРЯЖЕНИЕ
«Лестничная» схема преобразования параллельного кода в напряжение
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
Служебное ПО
Функциональное ПО
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
Служебное ПО
Функциональное ПО
НЕКОТОРЫЕ ПРИНЦИПЫ РАЗРАБОТКИ ПО
Модульность
Иерархичность
Системность
Формализация требований
Унификация архитектуры
Стандартизация принципов разработки
НЕКОТОРЫЕ ПРИНЦИПЫ РАЗРАБОТКИ ПО
Модульность
Иерархичность
Системность
Формализация требований
Унификация архитектуры
Стандартизация принципов разработки
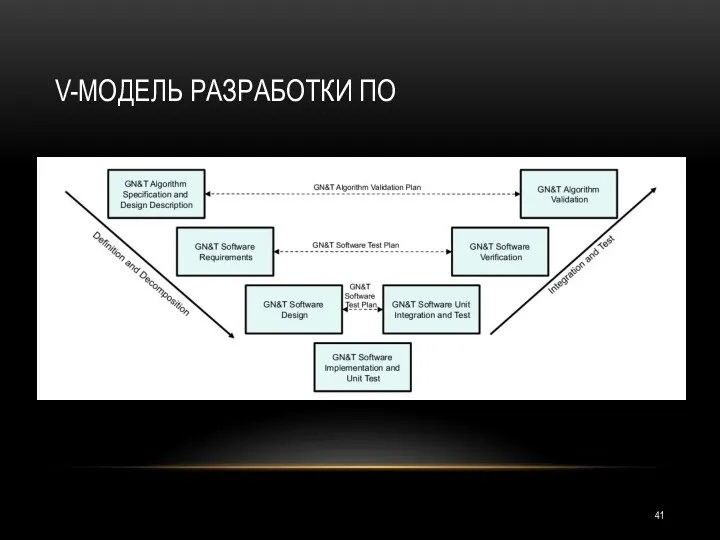
V-МОДЕЛЬ РАЗРАБОТКИ ПО
V-МОДЕЛЬ РАЗРАБОТКИ ПО
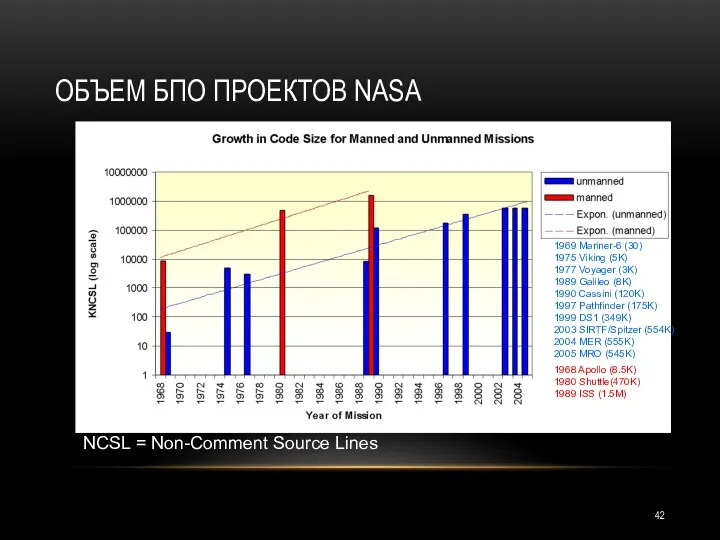
ОБЪЕМ БПО ПРОЕКТОВ NASA
NCSL = Non-Comment Source Lines
1969 Mariner-6 (30)
1975 Viking
ОБЪЕМ БПО ПРОЕКТОВ NASA
NCSL = Non-Comment Source Lines
1969 Mariner-6 (30)
1975 Viking
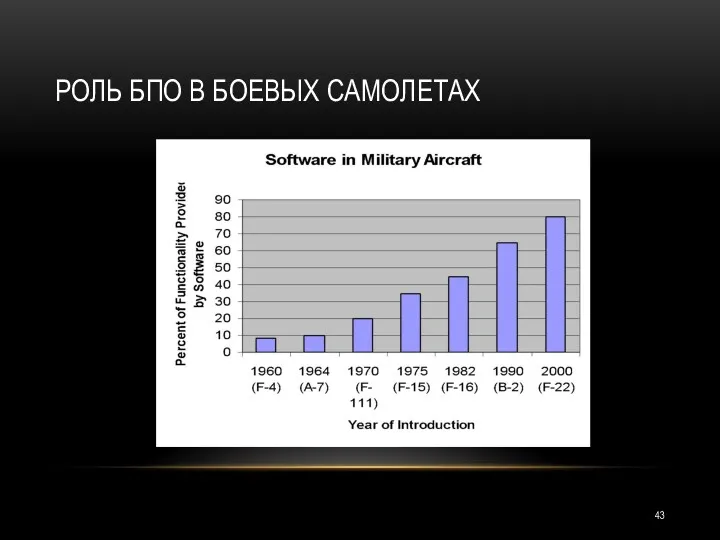
РОЛЬ БПО В БОЕВЫХ САМОЛЕТАХ
РОЛЬ БПО В БОЕВЫХ САМОЛЕТАХ
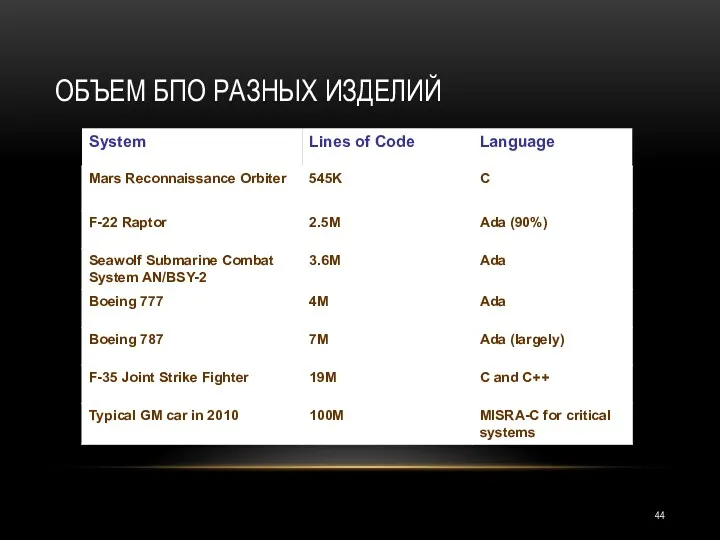
ОБЪЕМ БПО РАЗНЫХ ИЗДЕЛИЙ
ОБЪЕМ БПО РАЗНЫХ ИЗДЕЛИЙ
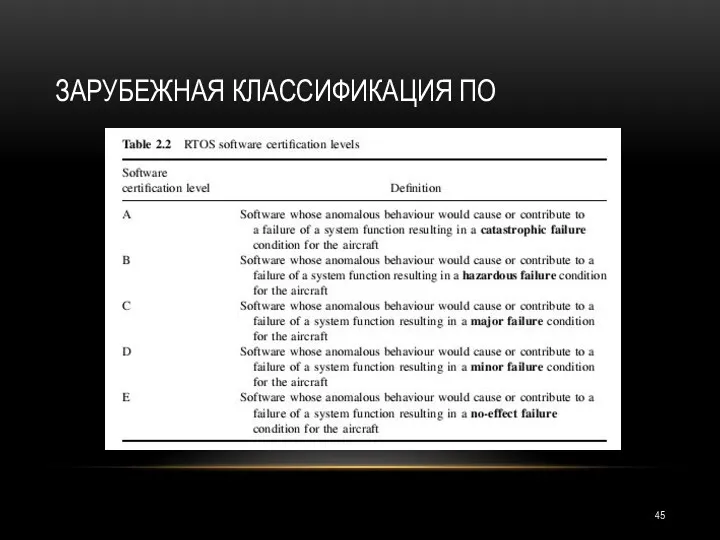
ЗАРУБЕЖНАЯ КЛАССИФИКАЦИЯ ПО
ЗАРУБЕЖНАЯ КЛАССИФИКАЦИЯ ПО
ОПЕРАЦИОННЫЕ СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ
Сертификация
Доступность исходного кода
мультизадачность
Время реакции на события
Время перезагрузки
Наличие драйверов
ОПЕРАЦИОННЫЕ СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ
Сертификация
Доступность исходного кода
мультизадачность
Время реакции на события
Время перезагрузки
Наличие драйверов
 Майка для куклы.
Майка для куклы. Развитие игровой деятельности ребенка. Консультация для родителей
Развитие игровой деятельности ребенка. Консультация для родителей 10 законов дружбы
10 законов дружбы Географическое положение территории Липецкой области. Влияние на природу и хозяйство.
Географическое положение территории Липецкой области. Влияние на природу и хозяйство. мастер-класс для учителей О чем говорит реклама на английском?
мастер-класс для учителей О чем говорит реклама на английском?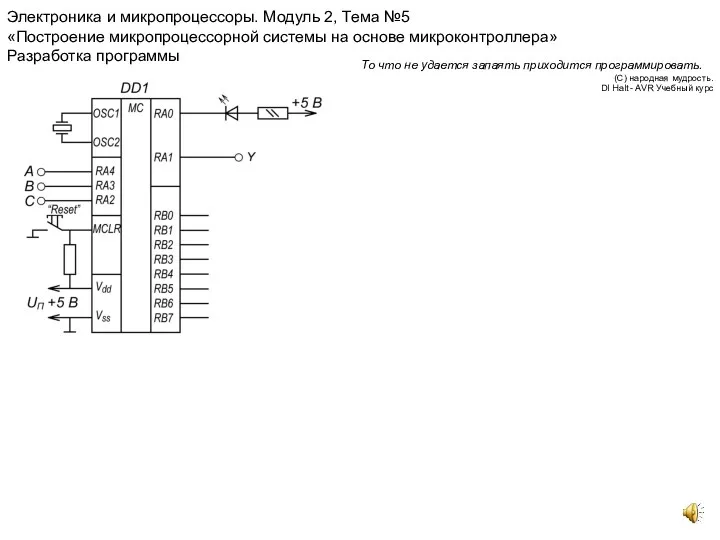 Электроника и микропроцессоры. Модуль 2,
Электроника и микропроцессоры. Модуль 2, Презентация к классному часу Чечня- от истоков до наших дней
Презентация к классному часу Чечня- от истоков до наших дней Принципы поэтапной реабилитации детей с ВРГН
Принципы поэтапной реабилитации детей с ВРГН Понятие пищевой биотехнологии и основные направления пищевой биотехнологии продуктов животного происхождения
Понятие пищевой биотехнологии и основные направления пищевой биотехнологии продуктов животного происхождения Жидкие вещества. Химия. 11 класс.
Жидкие вещества. Химия. 11 класс. Фото отчет праздников моих Звёздочек
Фото отчет праздников моих Звёздочек Животные Африки
Животные Африки Классификация химических элементов. Периодический закон
Классификация химических элементов. Периодический закон Приборы контроля высотного и кислородного оборудования. Требования к микроклимату в гермокабине
Приборы контроля высотного и кислородного оборудования. Требования к микроклимату в гермокабине Колыбельная песня – первая песня в жизни человека
Колыбельная песня – первая песня в жизни человека Қазақстан Республикасында тілдердің қызметі мен дамуын қамтамасыздандырудағы әрекеттері
Қазақстан Республикасында тілдердің қызметі мен дамуын қамтамасыздандырудағы әрекеттері Дидактические игры для работы по формированию мелкой моторики рук у детей младшего дошкольного возраста
Дидактические игры для работы по формированию мелкой моторики рук у детей младшего дошкольного возраста Акарозы кошек
Акарозы кошек Среднесибирское плоскогорье
Среднесибирское плоскогорье Общая психология
Общая психология Прогулка по городу Санкт-Петербург
Прогулка по городу Санкт-Петербург Тест по теме Кто хочет стать предпринимателем?
Тест по теме Кто хочет стать предпринимателем? Права иностранных граждан на землю в РФ
Права иностранных граждан на землю в РФ Урок -проект. Конструирование природных форм
Урок -проект. Конструирование природных форм Законы Ньютона. Решение задач
Законы Ньютона. Решение задач Деревянное золото
Деревянное золото Аппликация Цыплёнок
Аппликация Цыплёнок Дети войны
Дети войны