- Синтез цифрового регулятора асинхронного електропривода в MATLAB

Содержание
- 2. Актуальність проблеми Сьогодні особлива увага приділяється побудові систем керування електроприводів, структура яких містить пристрої цифрової техніки.
- 3. Мета роботи. Об’єкт і предмет дослідження Метою роботи є синтез цифрового регулятора асинхронного електроприводу в MATLAB.
- 4. Завдання дослідження Проаналізувати способи керування асинхронних електроприводів і визначити особливості математичного опису динамічної моделі системи векторного
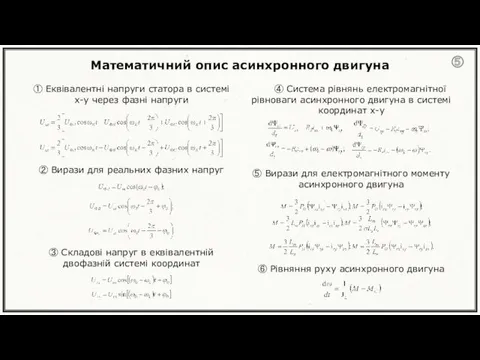
- 5. Математичний опис асинхронного двигуна ① Еквівалентні напруги статора в системі x-y через фазні напруги ② Вирази
- 6. Структурна схема асинхронного двигуна в ортогональній системі координат (x-у) ⑥
- 7. Методи синтезу цифрових регуляторів Для синтезу цифрового регулятора зазвичай використовують кілька методів : безперервна передавальна функція
- 8. Загальна характеристика об’єкта керування Загальний вигляд токарного верстата 16Б16Т1 Кінематична схема верстата 16Б16Т1 ⑧
- 9. Функціональна схема векторної системи керування ⑨
- 10. Структурна схема векторної системи керування ⑩
- 11. Схема моделювання системи векторного керування асинхронного електропривода з цифровим регулятором швидкості ⑪
- 12. Внутрішня структура підсистеми Discrete PI Controller ⑫
- 13. Графіки перехідних процесів струму та кутової швидкості ⑬
- 14. Аналіз показників якості ⑭
- 15. Схема моделювання системи векторного керування асинхронного електропривода з безперервним та цифровим регуляторами швидкості ⑮
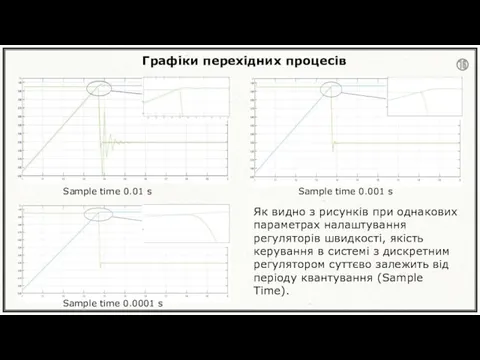
- 16. Графіки перехідних процесів Як видно з рисунків при однакових параметрах налаштування регуляторів швидкості, якість керування в
- 17. Розробка алгоритму керування для програмованих логічних контролерів ⑰
- 18. ВИСНОВКИ У магістерській роботі представлені результати, які узагальнюють теоретичні дослідження синтезу цифрового регулятора асинхронного електропривода в
- 20. Скачать презентацию
Актуальність проблеми
Сьогодні особлива увага приділяється побудові систем керування електроприводів, структура яких
Актуальність проблеми
Сьогодні особлива увага приділяється побудові систем керування електроприводів, структура яких
Мета роботи. Об’єкт і предмет дослідження
Метою роботи є синтез цифрового регулятора
Мета роботи. Об’єкт і предмет дослідження
Метою роботи є синтез цифрового регулятора
Завдання дослідження
Проаналізувати способи керування асинхронних електроприводів і визначити особливості математичного опису
Завдання дослідження
Проаналізувати способи керування асинхронних електроприводів і визначити особливості математичного опису
Математичний опис асинхронного двигуна
① Еквівалентні напруги статора в системі x-y через
Математичний опис асинхронного двигуна
① Еквівалентні напруги статора в системі x-y через

Структурна схема асинхронного двигуна
в ортогональній системі координат (x-у)
⑥
Структурна схема асинхронного двигуна
в ортогональній системі координат (x-у)
⑥
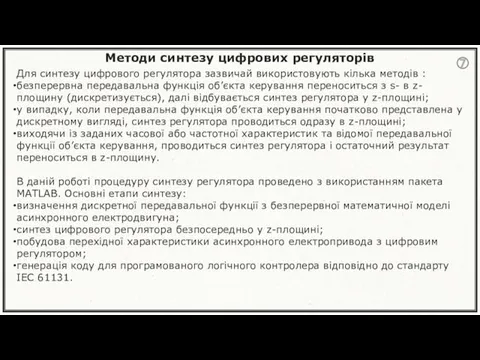
Методи синтезу цифрових регуляторів
Для синтезу цифрового регулятора зазвичай використовують кілька методів
Методи синтезу цифрових регуляторів
Для синтезу цифрового регулятора зазвичай використовують кілька методів

Загальна характеристика об’єкта керування
Загальний вигляд токарного верстата 16Б16Т1
Кінематична схема верстата 16Б16Т1
⑧
Загальна характеристика об’єкта керування
Загальний вигляд токарного верстата 16Б16Т1
Кінематична схема верстата 16Б16Т1
⑧

Функціональна схема векторної системи керування
⑨
Функціональна схема векторної системи керування
⑨

Структурна схема векторної системи керування
⑩
Структурна схема векторної системи керування
⑩

Схема моделювання системи векторного керування асинхронного електропривода
з цифровим регулятором швидкості
⑪
Схема моделювання системи векторного керування асинхронного електропривода
з цифровим регулятором швидкості
⑪
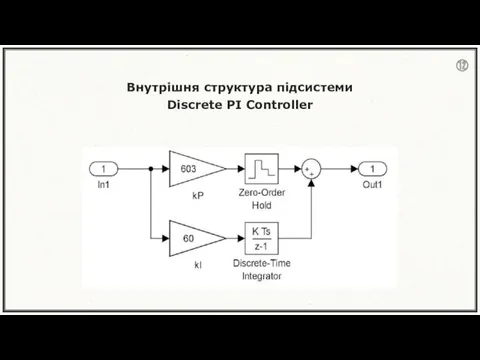
Внутрішня структура підсистеми
Discrete PI Controller
⑫
Внутрішня структура підсистеми
Discrete PI Controller
⑫
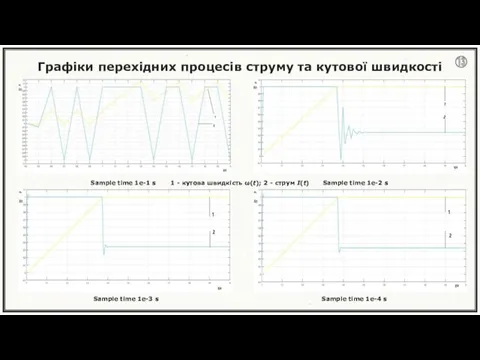
Графіки перехідних процесів струму та кутової швидкості
⑬
Графіки перехідних процесів струму та кутової швидкості
⑬
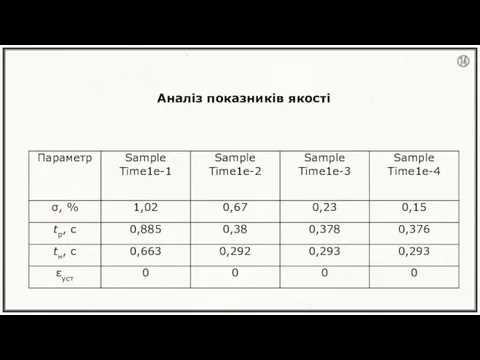
Аналіз показників якості
⑭
Аналіз показників якості
⑭

Схема моделювання системи векторного керування асинхронного електропривода
з безперервним та цифровим регуляторами
Схема моделювання системи векторного керування асинхронного електропривода з безперервним та цифровим регуляторами
Графіки перехідних процесів
Як видно з рисунків при однакових параметрах налаштування регуляторів
Графіки перехідних процесів
Як видно з рисунків при однакових параметрах налаштування регуляторів
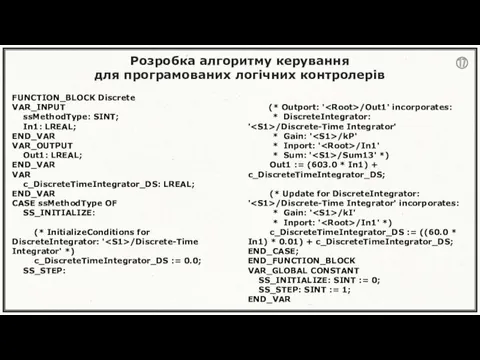
Розробка алгоритму керування
для програмованих логічних контролерів
⑰
Розробка алгоритму керування
для програмованих логічних контролерів
⑰
ВИСНОВКИ
У магістерській роботі представлені результати, які узагальнюють теоретичні дослідження синтезу цифрового
ВИСНОВКИ
У магістерській роботі представлені результати, які узагальнюють теоретичні дослідження синтезу цифрового
 Справка по исламу
Справка по исламу Масленица
Масленица Содержание духовно-нравственного развития и воспитания ребёнка на ступени дошкольного и начального общего образования Диск
Содержание духовно-нравственного развития и воспитания ребёнка на ступени дошкольного и начального общего образования Диск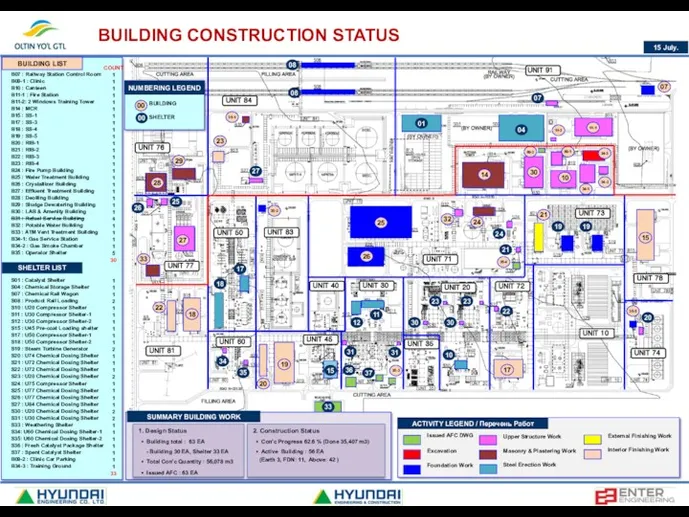 Building Work Status
Building Work Status Шымкент мұнай өңдеу зауыты
Шымкент мұнай өңдеу зауыты Триггеры. RS - триггер,
Триггеры. RS - триггер, Моделирование из бумаги
Моделирование из бумаги Психологический сценарий. Выход из сценария. Предки в моей голове. Занятие 6
Психологический сценарий. Выход из сценария. Предки в моей голове. Занятие 6 17424-ulitsy-goroda-tambova-vosstanovlen.pptx
17424-ulitsy-goroda-tambova-vosstanovlen.pptx Олимпийские игры
Олимпийские игры Игра-презентация Дифференциация д-т
Игра-презентация Дифференциация д-т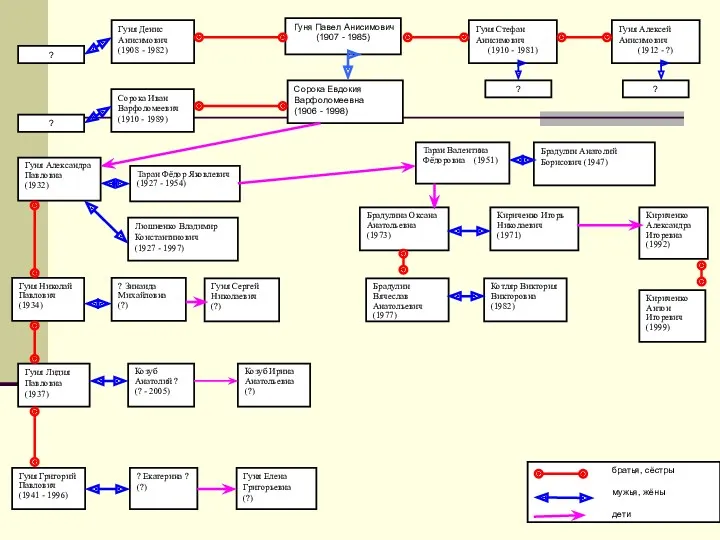 родословная одной семьи я
родословная одной семьи я Пищевые вещества, их источники, роль в структуре питания
Пищевые вещества, их источники, роль в структуре питания Гидравлический пресс
Гидравлический пресс презентация на тему Оздоровительная ходьба
презентация на тему Оздоровительная ходьба Православное паломничество на Святую Землю
Православное паломничество на Святую Землю Методологические основы логопедии
Методологические основы логопедии Өкпенің ошақты туберкулезі
Өкпенің ошақты туберкулезі Инструментальные материалы
Инструментальные материалы Психология конфликтного взаимодействия
Психология конфликтного взаимодействия Әр түрлі маман дәрігерінің кәсіби дефармациясы
Әр түрлі маман дәрігерінің кәсіби дефармациясы Возможности учебных предметов в осознании учащимися ценности здоровья
Возможности учебных предметов в осознании учащимися ценности здоровья Природа Урала
Природа Урала Дефекты соединений при сварке металлов и причины их возникновения
Дефекты соединений при сварке металлов и причины их возникновения Рождественская презентация поэтического клуба Мы пробуем перо.
Рождественская презентация поэтического клуба Мы пробуем перо. Портфолио учителя начальных классов
Портфолио учителя начальных классов Выступление на педагогическом совете Город Толерантности
Выступление на педагогическом совете Город Толерантности Present perfect
Present perfect