- Средства наблюдения

Содержание
- 2. Общие сведения о радиолокационной системе посадки РСП-10МН
- 3. Общие сведения о радиолокационной системе посадки РСП-10МН а) управление в простых и сложных метеорологических условиях, днем
- 4. Общие сведения о радиолокационной системе посадки РСП-10МН В состав радиолокационной системы посадки самолетов входят: диспетчерский радиолокатор
- 5. Общие сведения о радиолокационной системе посадки РСП-10МН Система РСП-10МН размещается на четырех транспортных единицах в двух
- 6. Общие сведения о радиолокационной системе посадки РСП-10МН В первом кузове (аппаратная) размещены аппаратура диспетчерского и посадочного
- 7. Посадочный радиолокатор (ПРЛ) предназначен для обеспечения непрерывного контроля диспетчером посадки положения воздушного судна (ВС) относительно линий
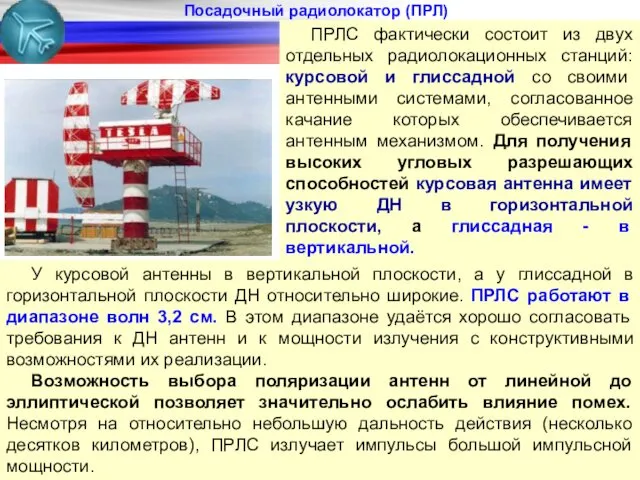
- 8. Посадочный радиолокатор (ПРЛ) ПРЛС фактически состоит из двух отдельных радиолокационных станций: курсовой и глиссадной со своими
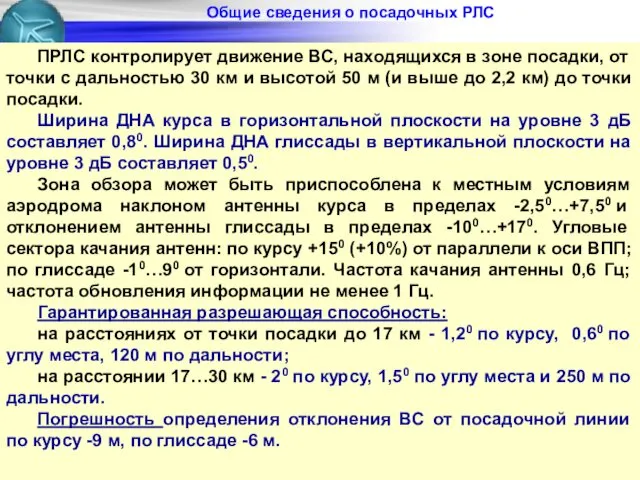
- 9. Общие сведения о посадочных РЛС ПРЛС контролирует движение ВС, находящихся в зоне посадки, от точки с
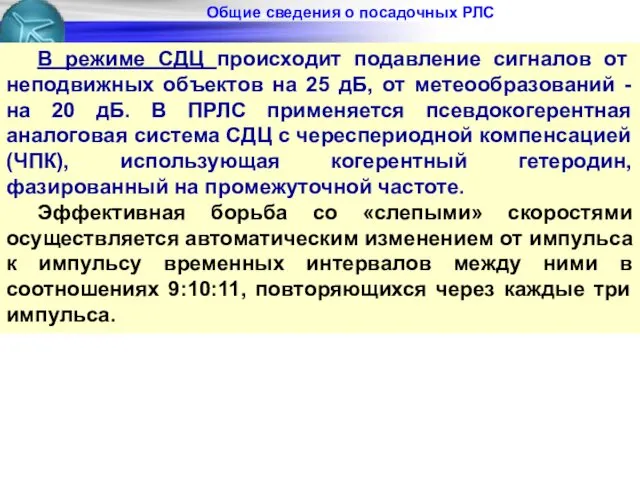
- 10. Общие сведения о посадочных РЛС В режиме СДЦ происходит подавление сигналов от неподвижных объектов на 25
- 11. Общие сведения о посадочных РЛС
- 12. Общие сведения о посадочных РЛС
- 13. Назначение, состав, технические данные приемных устройств первичного и вторичного каналов ПРЛ-10МН. 1. Общие сведения о посадочных
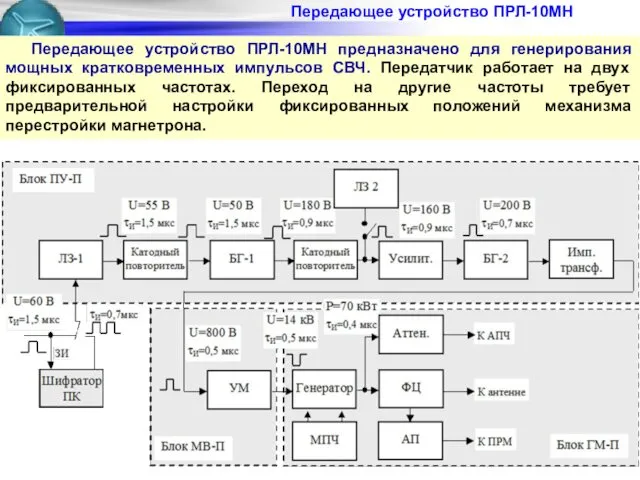
- 14. Передающее устройство ПРЛ-10МН Передающее устройство ПРЛ-10МН предназначено для генерирования мощных кратковременных импульсов СВЧ. Передатчик работает на
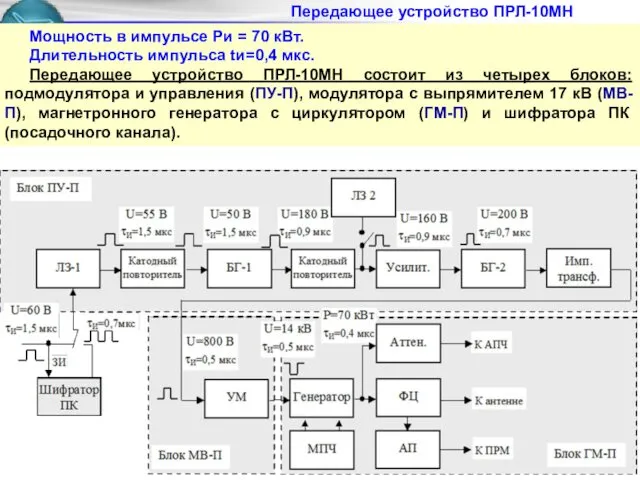
- 15. Передающее устройство ПРЛ-10МН Мощность в импульсе Ри = 70 кВт. Длительность импульса tи=0,4 мкс. Передающее устройство
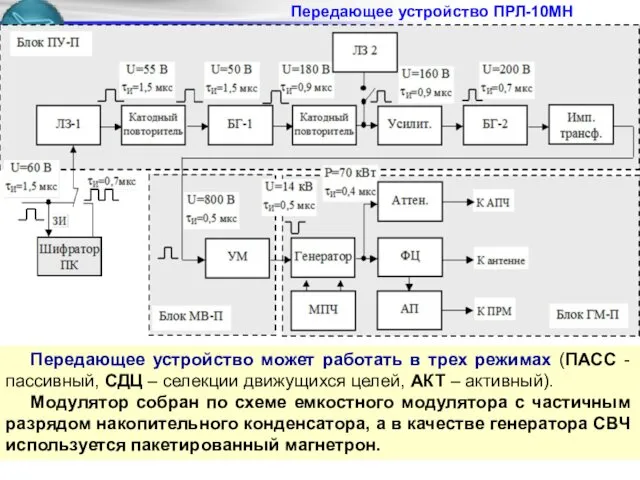
- 16. Передающее устройство ПРЛ-10МН Передающее устройство может работать в трех режимах (ПАСС - пассивный, СДЦ – селекции
- 17. Передающее устройство ПРЛ-10МН Передающее устройство ПРЛ с использованием шифратора ПК (режим АКТ) имеет три режима работы:
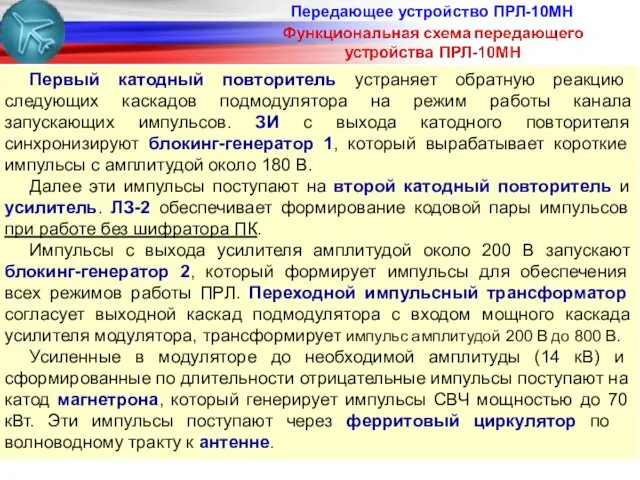
- 18. Передающее устройство ПРЛ-10МН Первый катодный повторитель устраняет обратную реакцию следующих каскадов подмодулятора на режим работы канала
- 19. Назначение, состав, технические данные приемных устройств ПРЛ-10МН. Посадочный радиолокатор (ПРЛ) Приемные устройства ПРЛ-10МН предназначены: - для
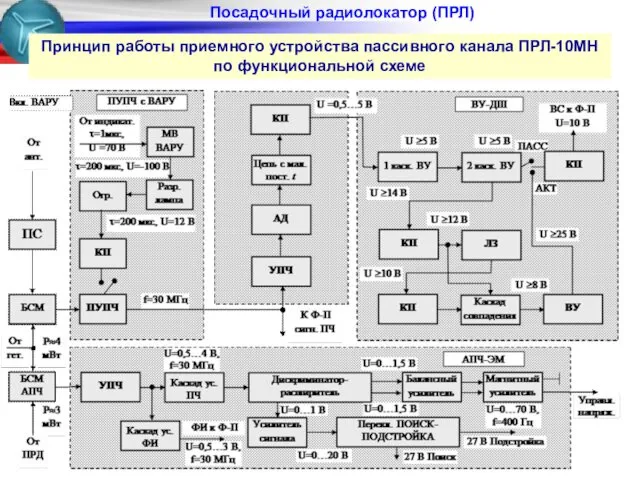
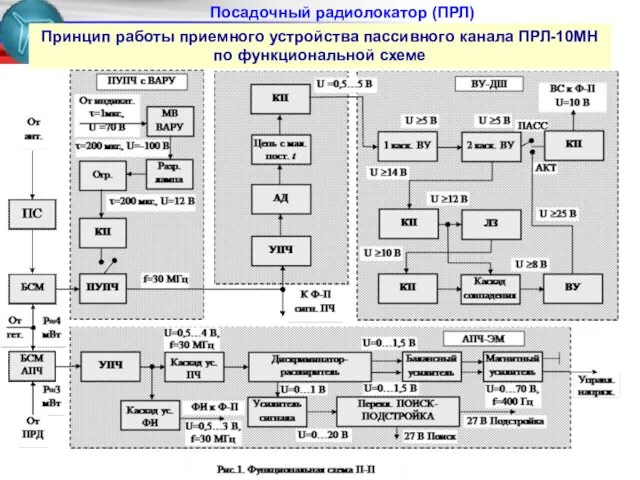
- 20. Посадочный радиолокатор (ПРЛ) Принцип работы приемного устройства пассивного канала ПРЛ-10МН по функциональной схеме
- 21. Посадочный радиолокатор (ПРЛ) Принцип работы приемного устройства пассивного канала ПРЛ-10МН по функциональной схеме Отраженный от ВС
- 22. Посадочный радиолокатор (ПРЛ) Принцип работы приемного устройства пассивного канала ПРЛ-10МН по функциональной схеме
- 23. Посадочный радиолокатор (ПРЛ) Принцип работы приемного устройства пассивного канала ПРЛ-10МН по функциональной схеме УПЧ-А предназначен для
- 24. Посадочный радиолокатор (ПРЛ) Принцип работы приемного устройства пассивного канала ПРЛ-10МН по функциональной схеме
- 26. Скачать презентацию

Общие сведения о радиолокационной системе посадки РСП-10МН
Общие сведения о радиолокационной системе посадки РСП-10МН
Общие сведения о радиолокационной системе посадки РСП-10МН
а) управление в простых и
Общие сведения о радиолокационной системе посадки РСП-10МН
а) управление в простых и
Общие сведения о радиолокационной системе посадки РСП-10МН
В состав радиолокационной системы посадки самолетов входят:
диспетчерский
Общие сведения о радиолокационной системе посадки РСП-10МН
В состав радиолокационной системы посадки самолетов входят:
диспетчерский

Общие сведения о радиолокационной системе посадки РСП-10МН
Система РСП-10МН размещается на четырех
Общие сведения о радиолокационной системе посадки РСП-10МН
Система РСП-10МН размещается на четырех

Общие сведения о радиолокационной системе посадки РСП-10МН
В первом кузове (аппаратная) размещены
Общие сведения о радиолокационной системе посадки РСП-10МН
В первом кузове (аппаратная) размещены
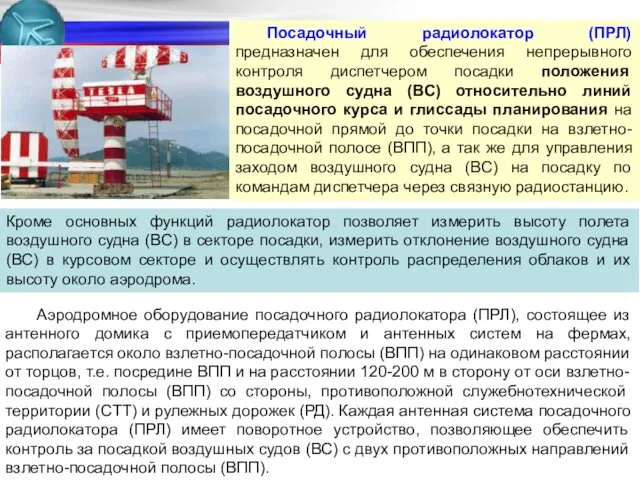
Посадочный радиолокатор (ПРЛ) предназначен для обеспечения непрерывного контроля диспетчером посадки положения
Посадочный радиолокатор (ПРЛ) предназначен для обеспечения непрерывного контроля диспетчером посадки положения
Посадочный радиолокатор (ПРЛ)
ПРЛС фактически состоит из двух отдельных радиолокационных станций:
Посадочный радиолокатор (ПРЛ)
ПРЛС фактически состоит из двух отдельных радиолокационных станций:
Общие сведения о посадочных РЛС
ПРЛС контролирует движение ВС, находящихся в зоне
Общие сведения о посадочных РЛС
ПРЛС контролирует движение ВС, находящихся в зоне
Общие сведения о посадочных РЛС
В режиме СДЦ происходит подавление сигналов от
Общие сведения о посадочных РЛС
В режиме СДЦ происходит подавление сигналов от

Общие сведения о посадочных РЛС
Общие сведения о посадочных РЛС
Общие сведения о посадочных РЛС
Общие сведения о посадочных РЛС
Назначение, состав, технические данные приемных устройств первичного и вторичного каналов ПРЛ-10МН.
1. Общие
Назначение, состав, технические данные приемных устройств первичного и вторичного каналов ПРЛ-10МН.
1. Общие
Передающее устройство ПРЛ-10МН
Передающее устройство ПРЛ-10МН предназначено для генерирования мощных кратковременных импульсов
Передающее устройство ПРЛ-10МН
Передающее устройство ПРЛ-10МН предназначено для генерирования мощных кратковременных импульсов
Передающее устройство ПРЛ-10МН
Мощность в импульсе Ри = 70 кВт.
Длительность импульса
Передающее устройство ПРЛ-10МН
Мощность в импульсе Ри = 70 кВт.
Длительность импульса
Передающее устройство ПРЛ-10МН
Передающее устройство может работать в трех режимах (ПАСС -
Передающее устройство ПРЛ-10МН
Передающее устройство может работать в трех режимах (ПАСС -
Передающее устройство ПРЛ-10МН
Передающее устройство ПРЛ с использованием шифратора ПК (режим АКТ)
Передающее устройство ПРЛ-10МН
Передающее устройство ПРЛ с использованием шифратора ПК (режим АКТ)
Передающее устройство ПРЛ-10МН
Первый катодный повторитель устраняет обратную реакцию следующих каскадов подмодулятора
Передающее устройство ПРЛ-10МН
Первый катодный повторитель устраняет обратную реакцию следующих каскадов подмодулятора
Назначение, состав, технические данные приемных устройств ПРЛ-10МН.
Посадочный радиолокатор (ПРЛ)
Приемные устройства
Назначение, состав, технические данные приемных устройств ПРЛ-10МН.
Посадочный радиолокатор (ПРЛ)
Приемные устройства
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной

Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
Посадочный радиолокатор (ПРЛ)
Принцип работы приемного устройства пассивного канала ПРЛ-10МН
по функциональной
 Образцы нравственности 2 часть
Образцы нравственности 2 часть Правила безопасности в повседневной жизни
Правила безопасности в повседневной жизни Операционная система Mac OS
Операционная система Mac OS Жил человек... христианские притчи.
Жил человек... христианские притчи. Общая характеристика климата. Физика среды и ограждающие конструкции. Лекция № 1
Общая характеристика климата. Физика среды и ограждающие конструкции. Лекция № 1 Головоломки мира
Головоломки мира Игровые технологии коррекции неконструктивного поведения дошкольников
Игровые технологии коррекции неконструктивного поведения дошкольников Силы,которые управляют рынком. Спрос и предложение товаров.
Силы,которые управляют рынком. Спрос и предложение товаров. Путь к успеху
Путь к успеху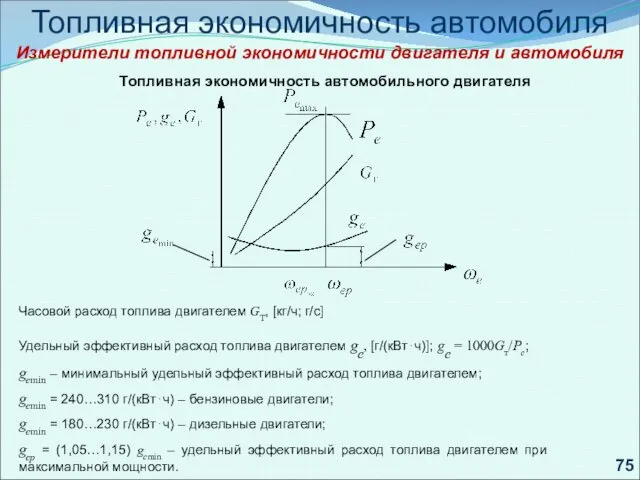 Топливная экономичность автомобиля
Топливная экономичность автомобиля Презентация 15.Творчество Поленова
Презентация 15.Творчество Поленова Космос
Космос Здоровый ребенок в здоровой семье Диск
Здоровый ребенок в здоровой семье Диск Учет собственного капитала
Учет собственного капитала Презентация Движение электрона в атоме 11 класс
Презентация Движение электрона в атоме 11 класс Население и страны Европы
Население и страны Европы Мы - пешеходы
Мы - пешеходы Тропикалық безгек. Безгек ошағын эпидемиологиялық тексеру әдістемесі
Тропикалық безгек. Безгек ошағын эпидемиологиялық тексеру әдістемесі как научиться читать карту
как научиться читать карту Проект: Проводник на железнодорожном транспорте
Проект: Проводник на железнодорожном транспорте Презентация ВЕСЬ МИР ВО МНЕ
Презентация ВЕСЬ МИР ВО МНЕ Артикуляционная гимнастика
Артикуляционная гимнастика Объединенные Арабские Эмираты (ОАЭ): флаг, герб, символы
Объединенные Арабские Эмираты (ОАЭ): флаг, герб, символы Презентация к внеклассному мероприятию или внеурочной деятельности 8 июля - День семьи, любви и верности
Презентация к внеклассному мероприятию или внеурочной деятельности 8 июля - День семьи, любви и верности Как оформить методическую разработку
Как оформить методическую разработку 20231102_podgotovka_k_gia_zad.40
20231102_podgotovka_k_gia_zad.40 Денсаулық сақтау саласындағы риск менеджмент
Денсаулық сақтау саласындағы риск менеджмент Роль заведующего в системе непрерывного образования педагогов
Роль заведующего в системе непрерывного образования педагогов