- Средства технической диагностики вагонов в эксплуатации

Содержание
- 2. Анализ известных разработок отечественных и зарубежных специалистов в этой области показывает, что данная техника и технология
- 3. К первому направлению относится создание технических средств, выявляющих неисправности подвижного состава непосредственно угрожающих безопасности движения поездов.
- 4. В эту группу входят следующие системы контроля: Обнаружение перегретых букс и заклиненных колес; выявление волочащихся деталей;
- 5. Второе направление связано с разработкой средств контроля, которые оценивают фактическое состояние подвижного состава, прибывающего на ПТО.
- 6. К этой группе приборов можно отнести все те же перегонные средства, а так же: детекторы неравномерного
- 7. Технические средства для обнаружения перегретых букс В 1996-99 годах разработаны и освоены производством комплекты технических средств
- 9. При модернизации сохраняются напольное и силовое оборудование. Вместо станционного устанавливается АРМ линейного поста контроля
- 10. В качестве станционного оборудования КТСМ-01 используются средства автоматизированной системы контроля подвижного состава АСК ПС, в состав
- 11. Автоматизированная система контроля подвижного состава (АСК ПС) Предназначена для централизованного контроля нагрева роликовых буксовых узлов и
- 12. Принцип действия аппаратуры КТСМ-01(Д), КТСМ-02 основан на: восприятии чувствительными элементами (болометрами) импульсов инфракрасного излучения от задних
- 15. Состав КТСМ-01 блок сопряжения БСУ-П для электрического согласования цепей напольного и силового оборудования. Периферийный контроллер ПК-02
- 16. Отличие КТСМ-01 от КТСМ-02 Подключение дополнительных модулей подсистем (12 и 15 соответственно) Подсистемы контроля в зависимости
- 17. Структурная схема комплекса КТСМ 02
- 18. Расположение напольной камеры
- 19. Устройства контроля схода подвижного состава СКВП-2 УКСПС-У УКСПС
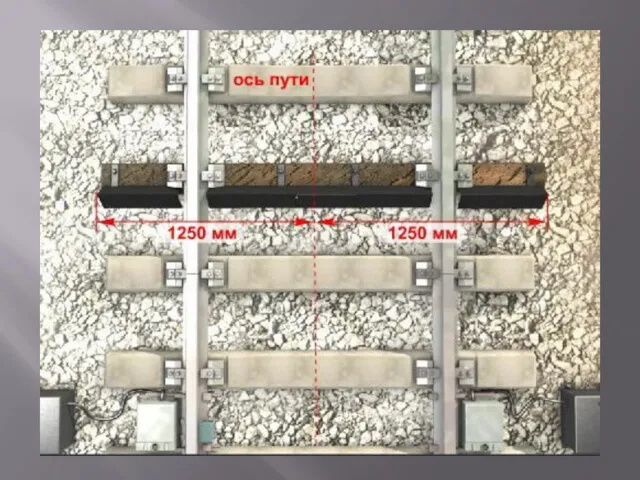
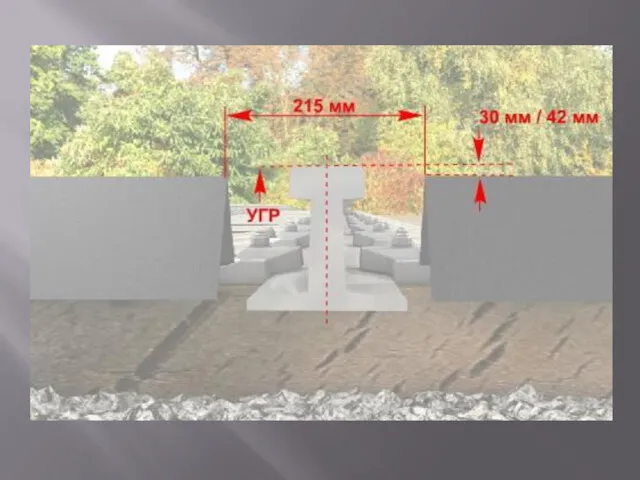
- 20. НАЗНАЧЕНИЕ, СОСТАВ И ПРИНЦИП ДЕЙСТВИЯ СКВП-2 Система контроля волочащихся предметов (СКВП -2) предназначена для автоматического выявления
- 23. При срабатывании датчика системы СКВП-2 из состава приборов КТСМ-02, срабатывают регистрирующие устройства у ДСП, а также
- 24. УКСПС-У
- 26. Срабатывание УКСПС-У
- 27. УКСПС
- 28. Подсистема речевого оповещения и сигнализации прос-1М Подсистема ПРОС-1М предназначена для оповещения по радиоканалу машиниста локомотива и
- 29. ПОСТ АКУСТИЧЕСКОГО КОНТРОЛЯ (ПАК) Система ПАК предназначена для акустического контроля технического состояния буксовых узлов колёсных пар
- 30. В состав системы ПАК входит: напольное оборудование, включающее измерительные микрофоны с предусилителями, размещаемые в антивандальных и
- 31. Система электропитания Система измерения акустического шума Система управления положением шторок измерительных боксов Система поддержания температурного режима
- 32. ПАК обеспечивает: автоматическое обнаружение дефектов подшипников буксовых узлов грузовых вагонов, включая дефекты роликов, сепаратора, внутреннего и
- 33. Основные технические характеристики ПАК: электропитание ПАК обеспечивается от существующего источника питания переменного тока напряжением 220 В,
- 36. Автоматизированная диагностическая система контроля параметров колесных пар вагонов «КОМПЛЕКС»
- 37. Назначение Выявление на ходу поезда износов цельнокатаных колес. Передача полученной информации на ближайший пункт технического обслуживания
- 38. Основные контролируемые параметры колесных пар Толщина обода Толщина гребня Сумма и разница толщин гребней Ширина обода
- 39. Технические характеристики Измерения производятся на скоростях движения поезда до 60 км/ч Погрешность измерений линейных размеров до
- 40. Напольное оборудование системы «Комплекс»
- 41. АРМ оператора ПТО и постовое оборудование
- 42. Система контроля дефектов на поверхности катания колес (ползун, навар, неравномерный прокат) Система контроля дефектов на поверхности
- 43. Внешний вид подсистемы
- 44. Принцип действия Система создана на основе индуктивных быстродействующих датчиков приближения. Общее количество датчиков - 32 (по
- 45. Технические данные Линейная скорость перемещения колесной пары при измерениях от 5 до 30 км/час. Потребляемая мощность
- 46. «АВТОМАТИЧЕСКОЕ УСТРОЙСТВО КОНТРОЛЯ СДВИГА БУКСЫ С ШЕЙКИ ОСИ» Данное устройство предназначено для выявления на ходу поезда
- 47. Внешний вид напольного оборудования Комплекса с подсистемой Букса
- 48. Принцип действия В основе технического решения контроля сдвига буксы лежит идея «бесконтактного штангенциркуля», реализованного с помощью
- 49. Принцип измерения и АРМ оператора
- 50. Технические данные Линейная скорость перемещения колесной пары при измерениях от 10 до 60 км/час. Потребляемая мощность
- 51. Триангуляционные лазерные датчики (лазерные сканеры) Лазерные триангуляционные датчики предназначены для использования в системах измерения различных геометрических
- 52. Принцип действия На поверхности объекта формируется световая метка. Изображение световой метки проецируется на позиционно-чувствительный фотоприемник (ПЗС).
- 53. Измерение диаметра колеса
- 54. Обмер профиля колеса
- 55. Пункт оперативного контроля технического состояния колесных пар (ОКТСКП)
- 56. Надежность и безопасность эксплуатации железнодорожного подвижного состава гарантируются испытаниями колес или колесных пар, как при их
- 57. Схема предлагаемого пункта контроля
- 58. Суть работы по выявлению дефектов колесных пар при помощи виртуальных приборов ZETLab сводится к тому, чтобы
- 59. Исходный сигнал с датчиков, входящих в систему дефектоскопии колесных пар
- 60. Последующая цифровая обработка полученных сигналов выполняется в несколько этапов: обработка сигналов с оптических датчиков перемещения; синхронизация
- 61. Промежуточный этап обработки данных после усреднения и разбиения акустического сигнала на участки
- 62. Спектрограмма сигнала с колесной пары четвертого вагона.
- 63. Одним из основных преимуществ системы ОКТСКП является возможность оперативного обнаружения дефектов при нормальном функционировании объекта исследования,
- 64. Заключение Применение комплексных систем ТД подвижного состава позволяет повысить безопасность движения за счет выработки рекомендаций об
- 66. Скачать презентацию
Анализ известных разработок отечественных и зарубежных специалистов в этой области
Анализ известных разработок отечественных и зарубежных специалистов в этой области
К первому направлению относится создание технических средств, выявляющих неисправности подвижного
К первому направлению относится создание технических средств, выявляющих неисправности подвижного
В эту группу входят следующие системы контроля:
Обнаружение перегретых букс и
В эту группу входят следующие системы контроля:
Обнаружение перегретых букс и
Второе направление связано с разработкой средств контроля, которые оценивают фактическое состояние
Второе направление связано с разработкой средств контроля, которые оценивают фактическое состояние
К этой группе приборов можно отнести все те же перегонные средства,
К этой группе приборов можно отнести все те же перегонные средства,
Технические средства для обнаружения перегретых букс
В 1996-99 годах разработаны и освоены
Технические средства для обнаружения перегретых букс
В 1996-99 годах разработаны и освоены
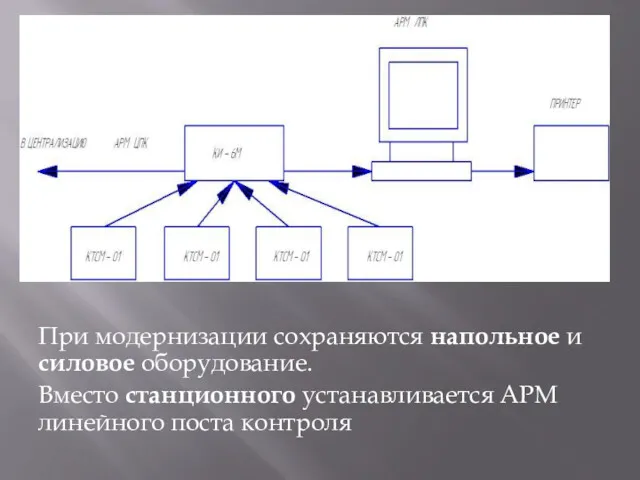
При модернизации сохраняются напольное и силовое оборудование.
Вместо станционного устанавливается АРМ
При модернизации сохраняются напольное и силовое оборудование.
Вместо станционного устанавливается АРМ
В качестве станционного оборудования КТСМ-01 используются средства автоматизированной системы контроля подвижного
В качестве станционного оборудования КТСМ-01 используются средства автоматизированной системы контроля подвижного
Автоматизированная система контроля подвижного состава (АСК ПС)
Предназначена для централизованного контроля нагрева
Автоматизированная система контроля подвижного состава (АСК ПС)
Предназначена для централизованного контроля нагрева
Принцип действия аппаратуры КТСМ-01(Д), КТСМ-02 основан на:
восприятии чувствительными элементами (болометрами) импульсов
Принцип действия аппаратуры КТСМ-01(Д), КТСМ-02 основан на:
восприятии чувствительными элементами (болометрами) импульсов
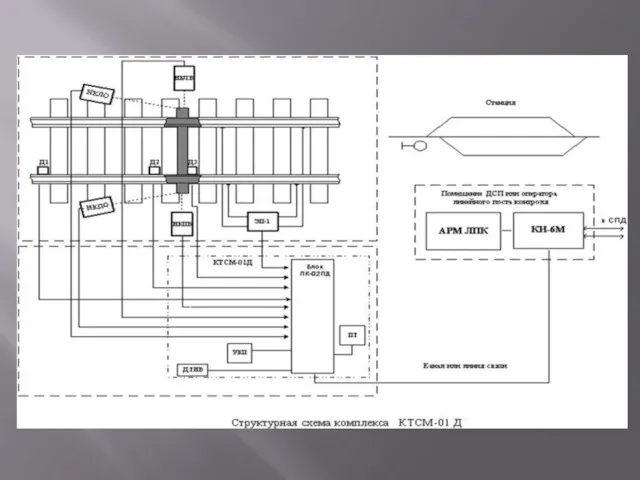

Состав КТСМ-01
блок сопряжения БСУ-П для электрического согласования цепей напольного и силового
Состав КТСМ-01
блок сопряжения БСУ-П для электрического согласования цепей напольного и силового
Отличие КТСМ-01 от КТСМ-02
Подключение дополнительных модулей подсистем (12 и 15 соответственно)
Подсистемы
Отличие КТСМ-01 от КТСМ-02
Подключение дополнительных модулей подсистем (12 и 15 соответственно)
Подсистемы
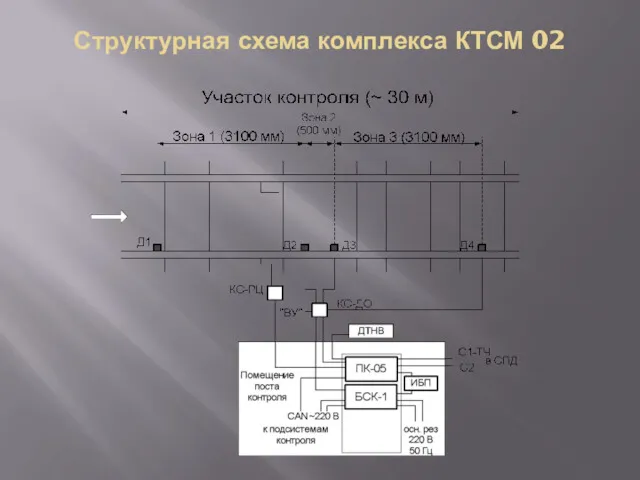
Структурная схема комплекса КТСМ 02
Структурная схема комплекса КТСМ 02

Расположение напольной камеры
Расположение напольной камеры
Устройства контроля схода подвижного состава
СКВП-2
УКСПС-У
УКСПС
Устройства контроля схода подвижного состава
СКВП-2
УКСПС-У
УКСПС
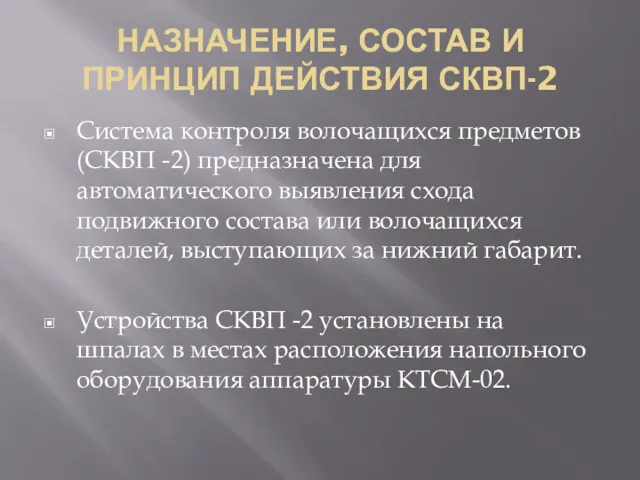
НАЗНАЧЕНИЕ, СОСТАВ И ПРИНЦИП ДЕЙСТВИЯ СКВП-2
Система контроля волочащихся предметов (СКВП -2)
НАЗНАЧЕНИЕ, СОСТАВ И ПРИНЦИП ДЕЙСТВИЯ СКВП-2
Система контроля волочащихся предметов (СКВП -2)
При срабатывании датчика системы СКВП-2 из состава приборов КТСМ-02, срабатывают регистрирующие
При срабатывании датчика системы СКВП-2 из состава приборов КТСМ-02, срабатывают регистрирующие

УКСПС-У
УКСПС-У


Срабатывание УКСПС-У
Срабатывание УКСПС-У
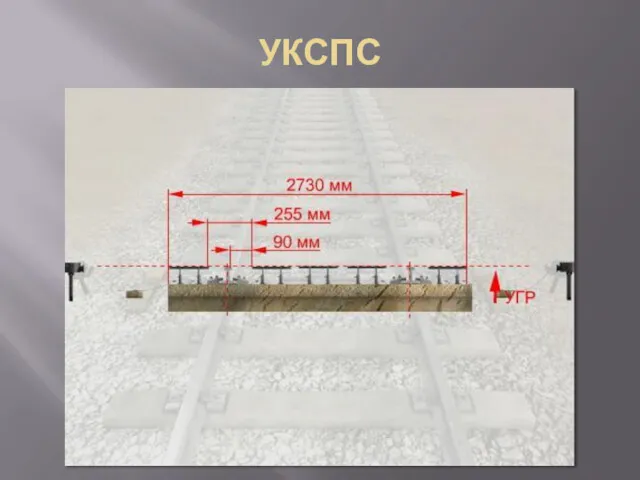
УКСПС
УКСПС
Подсистема речевого оповещения и сигнализации прос-1М
Подсистема ПРОС-1М предназначена для оповещения по
Подсистема речевого оповещения и сигнализации прос-1М
Подсистема ПРОС-1М предназначена для оповещения по
ПОСТ АКУСТИЧЕСКОГО КОНТРОЛЯ (ПАК)
Система ПАК предназначена для акустического контроля технического состояния
ПОСТ АКУСТИЧЕСКОГО КОНТРОЛЯ (ПАК)
Система ПАК предназначена для акустического контроля технического состояния
В состав системы ПАК входит:
напольное оборудование, включающее измерительные микрофоны с предусилителями,
В состав системы ПАК входит:
напольное оборудование, включающее измерительные микрофоны с предусилителями,
Система электропитания
Система измерения акустического шума
Система управления положением шторок измерительных боксов
Система поддержания
Система электропитания
Система измерения акустического шума
Система управления положением шторок измерительных боксов
Система поддержания
ПАК обеспечивает:
автоматическое обнаружение дефектов подшипников буксовых узлов грузовых вагонов, включая дефекты
ПАК обеспечивает:
автоматическое обнаружение дефектов подшипников буксовых узлов грузовых вагонов, включая дефекты
Основные технические характеристики ПАК:
электропитание ПАК обеспечивается от существующего источника питания переменного
Основные технические характеристики ПАК:
электропитание ПАК обеспечивается от существующего источника питания переменного


Автоматизированная диагностическая система контроля параметров
колесных пар вагонов «КОМПЛЕКС»
Автоматизированная диагностическая система контроля параметров
колесных пар вагонов «КОМПЛЕКС»
Назначение
Выявление на ходу поезда износов цельнокатаных колес. Передача полученной информации на
Назначение
Выявление на ходу поезда износов цельнокатаных колес. Передача полученной информации на
Основные контролируемые параметры колесных пар
Толщина обода
Толщина гребня
Сумма и разница толщин гребней
Ширина
Основные контролируемые параметры колесных пар
Толщина обода
Толщина гребня
Сумма и разница толщин гребней
Ширина
Технические характеристики
Измерения производятся на скоростях движения поезда до 60 км/ч
Погрешность измерений
Технические характеристики
Измерения производятся на скоростях движения поезда до 60 км/ч
Погрешность измерений
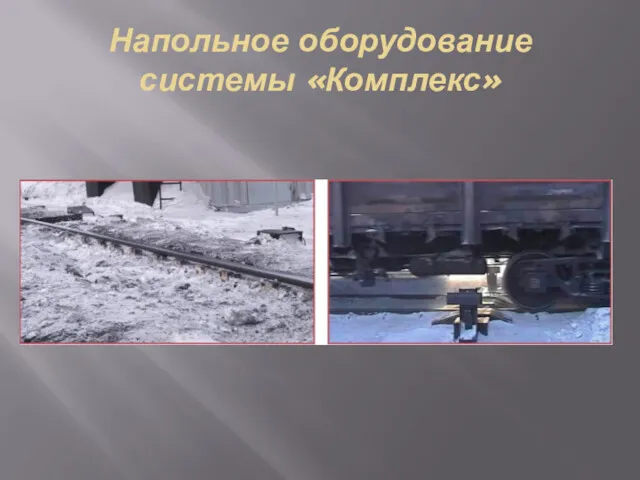
Напольное оборудование системы «Комплекс»
Напольное оборудование системы «Комплекс»
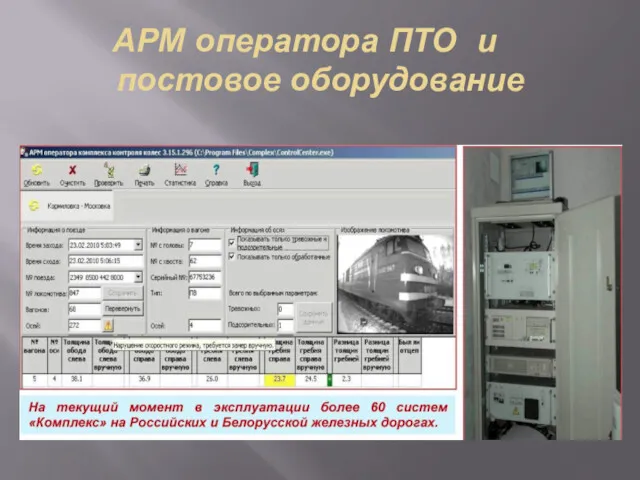
АРМ оператора ПТО и постовое оборудование
АРМ оператора ПТО и постовое оборудование
Система контроля дефектов на поверхности катания колес (ползун,
навар, неравномерный прокат)
Система контроля
Система контроля дефектов на поверхности катания колес (ползун,
навар, неравномерный прокат)
Система контроля

Внешний вид подсистемы
Внешний вид подсистемы
Принцип действия
Система создана на основе индуктивных быстродействующих датчиков приближения.
Общее количество
Принцип действия
Система создана на основе индуктивных быстродействующих датчиков приближения.
Общее количество
Технические данные
Линейная скорость перемещения колесной пары при измерениях от 5 до
Технические данные
Линейная скорость перемещения колесной пары при измерениях от 5 до
«АВТОМАТИЧЕСКОЕ УСТРОЙСТВО КОНТРОЛЯ СДВИГА БУКСЫ С ШЕЙКИ ОСИ»
Данное устройство предназначено для
«АВТОМАТИЧЕСКОЕ УСТРОЙСТВО КОНТРОЛЯ СДВИГА БУКСЫ С ШЕЙКИ ОСИ»
Данное устройство предназначено для

Внешний вид напольного оборудования Комплекса с подсистемой Букса
Внешний вид напольного оборудования Комплекса с подсистемой Букса
Принцип действия
В основе технического решения контроля сдвига буксы лежит идея
Принцип действия
В основе технического решения контроля сдвига буксы лежит идея
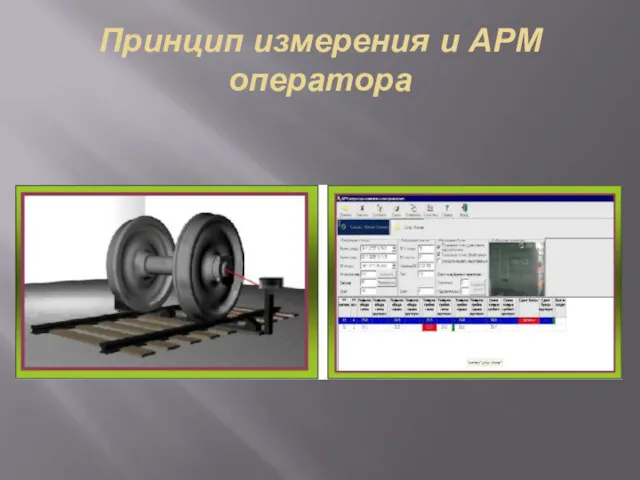
Принцип измерения и АРМ оператора
Принцип измерения и АРМ оператора
Технические данные
Линейная скорость перемещения колесной пары при измерениях от 10 до
Технические данные
Линейная скорость перемещения колесной пары при измерениях от 10 до
Триангуляционные лазерные датчики (лазерные сканеры)
Лазерные триангуляционные датчики предназначены для использования в
Триангуляционные лазерные датчики (лазерные сканеры)
Лазерные триангуляционные датчики предназначены для использования в
Принцип действия
На поверхности объекта формируется световая метка. Изображение световой метки проецируется
Принцип действия
На поверхности объекта формируется световая метка. Изображение световой метки проецируется

Измерение диаметра колеса
Измерение диаметра колеса

Обмер профиля колеса
Обмер профиля колеса

Пункт оперативного контроля технического состояния колесных пар (ОКТСКП)
Пункт оперативного контроля технического состояния колесных пар (ОКТСКП)
Надежность и безопасность эксплуатации железнодорожного подвижного состава гарантируются испытаниями колес или
Надежность и безопасность эксплуатации железнодорожного подвижного состава гарантируются испытаниями колес или

Схема предлагаемого пункта контроля
Схема предлагаемого пункта контроля
Суть работы по выявлению дефектов колесных пар при помощи виртуальных приборов ZETLab сводится
Суть работы по выявлению дефектов колесных пар при помощи виртуальных приборов ZETLab сводится
Исходный сигнал с датчиков, входящих в систему дефектоскопии колесных пар
Исходный сигнал с датчиков, входящих в систему дефектоскопии колесных пар
Последующая цифровая обработка полученных сигналов выполняется в несколько этапов:
обработка сигналов с
Последующая цифровая обработка полученных сигналов выполняется в несколько этапов:
обработка сигналов с
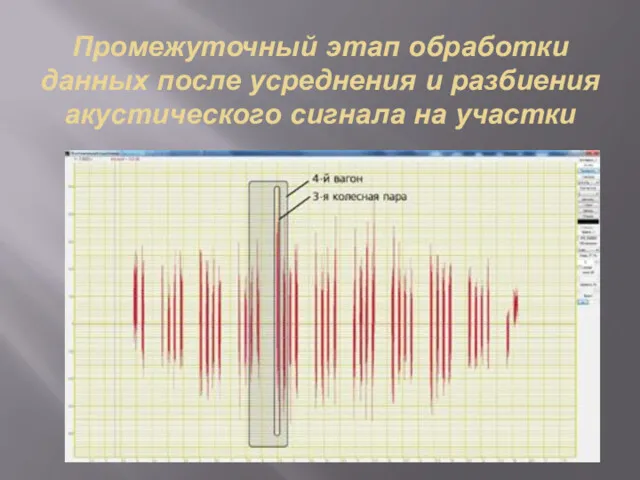
Промежуточный этап обработки данных после усреднения и разбиения акустического сигнала на
Промежуточный этап обработки данных после усреднения и разбиения акустического сигнала на
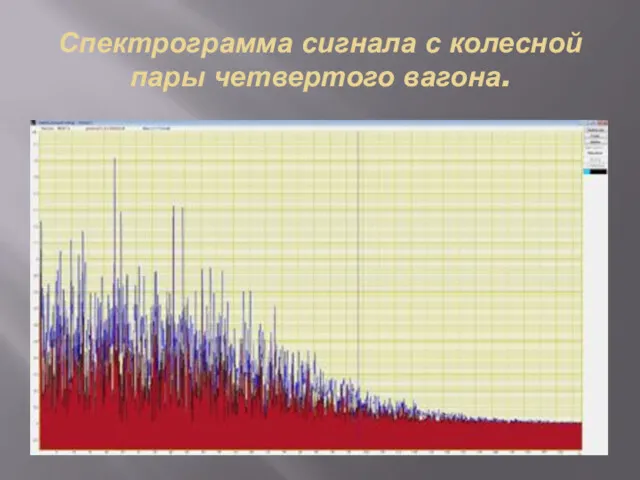
Спектрограмма сигнала с колесной пары четвертого вагона.
Спектрограмма сигнала с колесной пары четвертого вагона.
Одним из основных преимуществ системы ОКТСКП является возможность оперативного обнаружения дефектов
Одним из основных преимуществ системы ОКТСКП является возможность оперативного обнаружения дефектов
Заключение
Применение комплексных систем ТД подвижного состава позволяет повысить безопасность движения за
Заключение
Применение комплексных систем ТД подвижного состава позволяет повысить безопасность движения за
 Интеллектуальный марафон - 5 (2 класс)
Интеллектуальный марафон - 5 (2 класс) Управление разработкой трудноизвлекаемых запасов при заводнении
Управление разработкой трудноизвлекаемых запасов при заводнении презентация к логопедическому досугу Путешествие в страну Грамотей-ка
презентация к логопедическому досугу Путешествие в страну Грамотей-ка На пути к Новому времени. (10 класс)
На пути к Новому времени. (10 класс) Образ Пушкина в изобразительном искусстве
Образ Пушкина в изобразительном искусстве Связь между нарушениями в устной и письменной речи
Связь между нарушениями в устной и письменной речи Социальное проектирование
Социальное проектирование География современной нефтегазодобычи
География современной нефтегазодобычи Транспорт. Пропускная способность проезжей части. Транспортные пересечения
Транспорт. Пропускная способность проезжей части. Транспортные пересечения Экстрактауға арналған жабдықтар комуницирленген және комуницирленбеген эктракторлардың батареялары. Үздіксіз экстракторлар
Экстрактауға арналған жабдықтар комуницирленген және комуницирленбеген эктракторлардың батареялары. Үздіксіз экстракторлар Гренландия. Эскимосы
Гренландия. Эскимосы Расчет производственной программы по техническому обслуживанию и ремонту подвижного состава
Расчет производственной программы по техническому обслуживанию и ремонту подвижного состава Занятие клуба Узнаем сами по теме Нефть и её свойства
Занятие клуба Узнаем сами по теме Нефть и её свойства Переживание горя в старости
Переживание горя в старости Особенности конструкции переносных мотопомп Гейзер
Особенности конструкции переносных мотопомп Гейзер Сельское хозяйство. Растениеводство. Животноводство
Сельское хозяйство. Растениеводство. Животноводство Классификация органических соединений
Классификация органических соединений Производители модулей памяти
Производители модулей памяти Любовь в жизни Печорина. Женские образы и их роль в раскрытии характера Печорина в романе М.Ю. Лермонтова Герой нашего времени
Любовь в жизни Печорина. Женские образы и их роль в раскрытии характера Печорина в романе М.Ю. Лермонтова Герой нашего времени Кодирование целых чисел
Кодирование целых чисел Celebrities. How was your quarantine?
Celebrities. How was your quarantine? Первая помощь при поражении органов дыхания
Первая помощь при поражении органов дыхания Презентация полотенцесушителей Azario
Презентация полотенцесушителей Azario Корисні копалини
Корисні копалини В гостях у тёти Кошки (презентация)
В гостях у тёти Кошки (презентация) Параллельная работа трансформатора
Параллельная работа трансформатора Стратегии Петрова Максимов
Стратегии Петрова Максимов Игра по ПДД На улицах и дорогах
Игра по ПДД На улицах и дорогах