- Технико-экономическая эффективность автоматизации технологических процессов

Содержание
- 2. ОСНОВНЫЕ ПОНЯТИЯ О СИСТЕМАХ АВТОМАТИЗАЦИИ В зависимости от функций, выполняемых специальными автоматическими устройствами, различают следующие основные
- 3. Кибернетика — наука об управлении сложными развивающимися системами. Кибернетика изучает общие закономерности процессов, которые происходят в
- 4. По степени автоматизации различают : ручное управление, автоматизированное управление, автоматическое управление.
- 5. В современной автоматике системы управления разделяют на: автоматизированные системы управления производством (АСУП), автоматизированные системы управления технологическими
- 6. По степени автоматического управления производственными ТП различают : частичная автоматизация, комплексная автоматизация, полная автоматизация.
- 7. ХАРАКТЕРИСТИКА И КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ Структурная схема системы ручного управления 1 — объект управления; 2—
- 8. Структурная схема системы автоматического управления 1 — объект управления; 2— измерительный прибор; 3 — оператор; 4
- 9. Классификация автоматических систем управления
- 10. Функциональная схема замкнутой АСУ с управлением по отклонению 1 — регулятор; 2— измерительный преобразователь уровня воды;
- 11. Функциональная схема разомкнутой АСУ с управлением по возмущению 1 — регулятор; 2— измерительный преобразователи давления воды;
- 12. Функциональная схема комбинированной АСУ 1 — регулятор; 2 и 4— измерительные преобразователи уровня и давления воды;
- 13. По методу управления автоматические СУ подразделяют на: Приспосабливающиеся, или адаптивные, автоматические СУ целенаправленно изменяют алгоритмы управления
- 14. По результату работы системы в установившемся состоянии В статических системах по окончании переходного процесса существует разница
- 15. По характеру изменения управляющих воздействий во времени 1.В непрерывных системах управляемая величина и управляющее воздействие —
- 16. По виду дифференциального уравнения АСУ подразделяют на: линейные системы - описывается линейными дифференциальными уравнениями, нелинейные системы,
- 17. ОБЩИЙ ПОДХОД К АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ локальные системы автоматики АСУ ТП использование ЭВМ
- 18. В состав технических средств локальных систем автоматики входят: автоматические устройства с текущей информацией о возмущении,; автоматические
- 19. Структурная схема микропроцессорной системы управления на базе микро-ЭВМ 1 — технологический объект управления; 2 — измерительные
- 20. Режим работы микро-ЭВМ в системах управления ТП а — информационно-советующий режим; б — режим супервизорною управления;
- 21. Варианты оперативного управления ТП Децентрализованный контроль и управление Централизованный контроль и управление Автоматизированное управление Автоматическое управление
- 22. ОСНОВНЫЕ ИСТОЧНИКИ И ПОКАЗАТЕЛИ ТЕХНИКО-ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ АВТОМАТИЗАЦИИ Капитальные затраты —складываются из: Кс - стоимости средств автоматики
- 23. Годовые эксплуатационные издержки производства складываются из амортизационных отчислений Ио, отчислений Ит на текущий ремонт, затрат на
- 25. Скачать презентацию
ОСНОВНЫЕ ПОНЯТИЯ О СИСТЕМАХ АВТОМАТИЗАЦИИ
В зависимости от функций, выполняемых специальными
ОСНОВНЫЕ ПОНЯТИЯ О СИСТЕМАХ АВТОМАТИЗАЦИИ
В зависимости от функций, выполняемых специальными
Кибернетика
— наука об управлении сложными развивающимися системами.
Кибернетика изучает общие закономерности процессов,
Кибернетика
— наука об управлении сложными развивающимися системами.
Кибернетика изучает общие закономерности процессов,
По степени автоматизации различают :
ручное управление,
автоматизированное управление,
автоматическое управление.
По степени автоматизации различают :
ручное управление,
автоматизированное управление,
автоматическое управление.
В современной автоматике системы управления разделяют на:
автоматизированные системы управления производством (АСУП),
В современной автоматике системы управления разделяют на:
автоматизированные системы управления производством (АСУП),
По степени автоматического управления производственными ТП различают :
частичная автоматизация,
комплексная автоматизация,
полная автоматизация.
По степени автоматического управления производственными ТП различают :
частичная автоматизация,
комплексная автоматизация,
полная автоматизация.
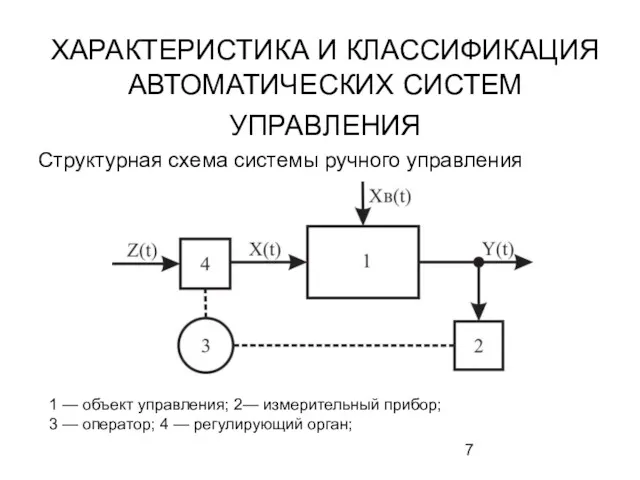
ХАРАКТЕРИСТИКА И КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ
Структурная схема системы ручного управления
ХАРАКТЕРИСТИКА И КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ
Структурная схема системы ручного управления
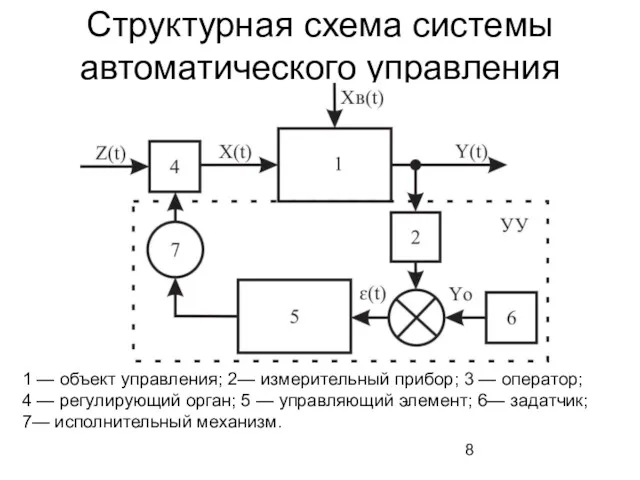
Структурная схема системы автоматического управления
1 — объект управления; 2— измерительный
Структурная схема системы автоматического управления
1 — объект управления; 2— измерительный
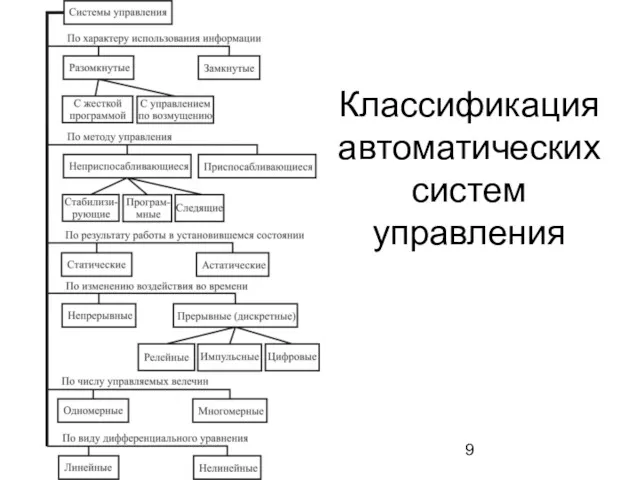
Классификация автоматических систем управления
Классификация автоматических систем управления

Функциональная схема замкнутой АСУ с управлением по отклонению
1 — регулятор;
Функциональная схема замкнутой АСУ с управлением по отклонению
1 — регулятор;
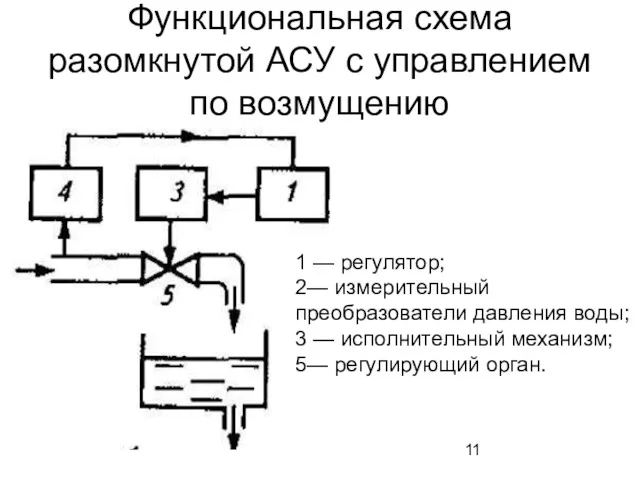
Функциональная схема разомкнутой АСУ с управлением по возмущению
1 — регулятор;
Функциональная схема разомкнутой АСУ с управлением по возмущению
1 — регулятор;

Функциональная схема комбинированной АСУ
1 — регулятор;
2 и 4— измерительные
преобразователи уровня
и
Функциональная схема комбинированной АСУ
1 — регулятор;
2 и 4— измерительные
преобразователи уровня
и
По методу управления автоматические СУ подразделяют на:
Приспосабливающиеся, или адаптивные, автоматические СУ
По методу управления автоматические СУ подразделяют на:
Приспосабливающиеся, или адаптивные, автоматические СУ
По результату работы системы в установившемся состоянии
В статических системах по
По результату работы системы в установившемся состоянии
В статических системах по
По характеру изменения управляющих воздействий во времени
1.В непрерывных системах управляемая
По характеру изменения управляющих воздействий во времени
1.В непрерывных системах управляемая
По виду дифференциального уравнения АСУ
подразделяют на:
линейные системы - описывается
По виду дифференциального уравнения АСУ
подразделяют на:
линейные системы - описывается
ОБЩИЙ ПОДХОД К АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
локальные системы автоматики
АСУ ТП
использование
ОБЩИЙ ПОДХОД К АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
локальные системы автоматики
АСУ ТП
использование
В состав технических средств локальных систем автоматики входят:
автоматические устройства с текущей
В состав технических средств локальных систем автоматики входят:
автоматические устройства с текущей
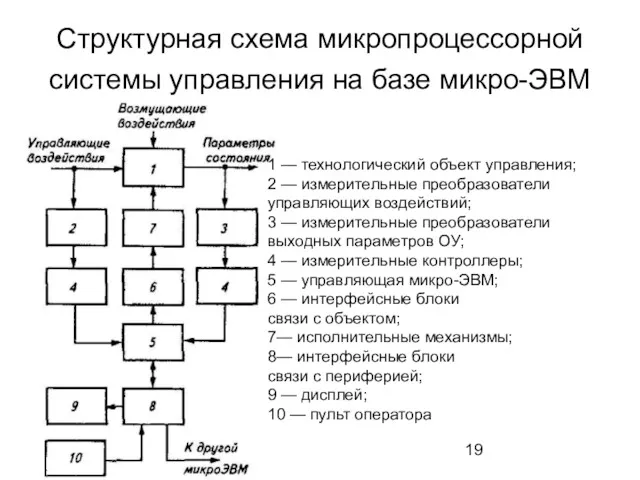
Структурная схема микропроцессорной системы управления на базе микро-ЭВМ
1 — технологический
Структурная схема микропроцессорной системы управления на базе микро-ЭВМ
1 — технологический
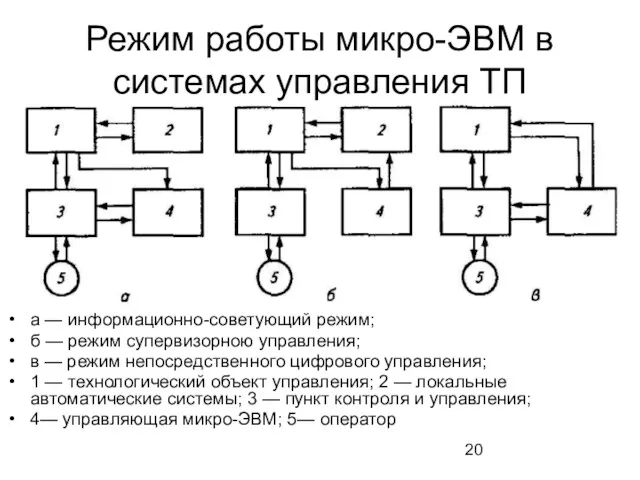
Режим работы микро-ЭВМ в системах управления ТП
а — информационно-советующий режим;
Режим работы микро-ЭВМ в системах управления ТП
а — информационно-советующий режим;
Варианты оперативного управления ТП
Децентрализованный контроль и управление
Централизованный контроль и
Варианты оперативного управления ТП
Децентрализованный контроль и управление
Централизованный контроль и
ОСНОВНЫЕ ИСТОЧНИКИ И ПОКАЗАТЕЛИ ТЕХНИКО-ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ АВТОМАТИЗАЦИИ
Капитальные затраты —складываются из:
Кс
ОСНОВНЫЕ ИСТОЧНИКИ И ПОКАЗАТЕЛИ ТЕХНИКО-ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ АВТОМАТИЗАЦИИ
Капитальные затраты —складываются из:
Кс
Годовые эксплуатационные издержки производства складываются из амортизационных отчислений Ио, отчислений Ит
Годовые эксплуатационные издержки производства складываются из амортизационных отчислений Ио, отчислений Ит
 Амарант в сельском хозяйстве
Амарант в сельском хозяйстве Открытая форсайт-лаборатория старшеклассников. Будущее как вызов для образования
Открытая форсайт-лаборатория старшеклассников. Будущее как вызов для образования Принципиальная электрическая схема
Принципиальная электрическая схема презентация к уроку технологии Ёлка из модулей
презентация к уроку технологии Ёлка из модулей Роль туристских кадров в работе туристского учреждения
Роль туристских кадров в работе туристского учреждения Япония. Японская письменность
Япония. Японская письменность Электростатика (жалғасы)
Электростатика (жалғасы) Шинопровод
Шинопровод История развития сварки
История развития сварки Неметаллы: общая характеристика
Неметаллы: общая характеристика Географическое положение Африки
Географическое положение Африки Презентация логопедического занятия в старшей группе к лексической теме : Домашние животные и их детеныши
Презентация логопедического занятия в старшей группе к лексической теме : Домашние животные и их детеныши Чистохин Г.Д
Чистохин Г.Д Подарок маме своими руками
Подарок маме своими руками Clothes names
Clothes names Зникаючі рослини України
Зникаючі рослини України Сказуемое. Типы сказуемого. 10 класс
Сказуемое. Типы сказуемого. 10 класс Правила остановки кровотечений
Правила остановки кровотечений Урок в 10 классе Электронное и пространственное строение алканов
Урок в 10 классе Электронное и пространственное строение алканов Здравствуй, школа! (презентация)
Здравствуй, школа! (презентация) Фердинанд де Соссюр
Фердинанд де Соссюр Физические упражнения, рекомендуемые сочетать с силовыми упражнениями
Физические упражнения, рекомендуемые сочетать с силовыми упражнениями Онтология, как наука о бытии
Онтология, как наука о бытии Пяльма
Пяльма Процесс перемешивания. Механический, пневматический и гидравлический способы
Процесс перемешивания. Механический, пневматический и гидравлический способы Бройлерное кролиководство
Бройлерное кролиководство Царская семья - идеал любви и образец семейной жизни
Царская семья - идеал любви и образец семейной жизни Қиял. Сөйлеу
Қиял. Сөйлеу