- Теория сетей Петри и моделирование систем

Содержание
- 2. Теория сетей Петри и моделирование систем Определение 1. Сеть Петри (СП) - это двудольный ориентированный мультиграф
- 3. Теория сетей Петри и моделирование систем Кратность дуги, соединяющей входную позицию pi с переходом tj, определяется
- 4. Аналогично, если O(pi, tj) > 0 , то переход tj называют входным к позиции pi, а
- 5. Введем понятие элементарной сети. Определение 2. Элементарной сетью t называется СП N = (P, T, I,
- 6. При функционировании СП переходит от одной разметки к другой. Каждая разметка представляет собой функцию μ :
- 7. Основные определения и обозначения = (0,0). Теория сетей Петри и моделирование систем
- 8. Основные определения и обозначения = (0,0). Теория сетей Петри и моделирование систем
- 9. Основные определения и обозначения = (0,0). Теория сетей Петри и моделирование систем
- 10. Пример сети Петри = (0,0). P = {p1, p2, p3, p4} ; T = {t1, t2,
- 11. Модификации сетей Петри (иерархические сети) = (0,0). Иерархические сети (ИСП) являются обобщением СП и служат для
- 12. Модификации сетей Петри (ингибиторные сети) = (0,0). В рассмотренных СП недостатком является то, что нельзя отметить
- 13. = (0,0). Ингибиторная сеть представляет собой СП, дополненную специальной функцией инцидентности FI:P×T→{0,1}, которая вводит ингибиторные дуги
- 14. = (0,0). При описании функционирования СП отмечалась недетерминируемость следующего рода: если может сработать несколько переходов, то
- 15. = (0,0). Правило срабатывания перехода дополним следующим условием: переход t может сработать при разметке μ ,
- 16. = (0,0). При построении моделей очень важным является учет временных характеристик моделируемых событий. Предлагаемое расширение СП
- 17. Модификации сетей Петри = (0,0). Наряду с описанными расширениями СП в современной литературе встречается ряд других
- 19. Скачать презентацию
Теория сетей Петри и моделирование систем
Определение 1. Сеть Петри (СП)
Теория сетей Петри и моделирование систем
Определение 1. Сеть Петри (СП)
Теория сетей Петри и моделирование систем
Кратность дуги, соединяющей входную позицию
Теория сетей Петри и моделирование систем
Кратность дуги, соединяющей входную позицию
Аналогично, если O(pi, tj) > 0 , то переход tj называют
Аналогично, если O(pi, tj) > 0 , то переход tj называют
Введем понятие элементарной сети.
Определение 2. Элементарной сетью t называется СП N
Введем понятие элементарной сети.
Определение 2. Элементарной сетью t называется СП N
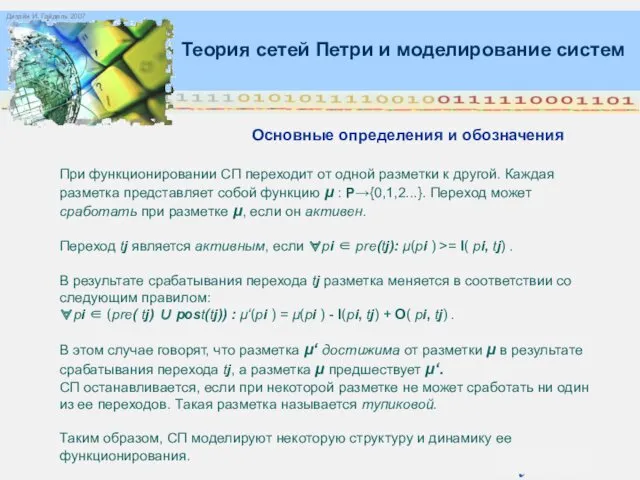
При функционировании СП переходит от одной разметки к другой. Каждая разметка
При функционировании СП переходит от одной разметки к другой. Каждая разметка
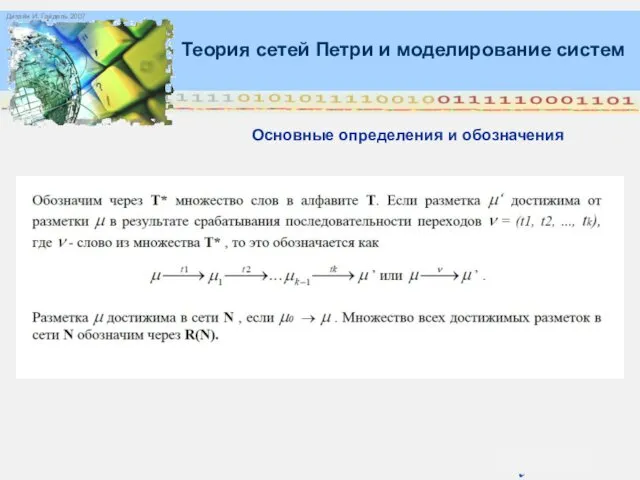
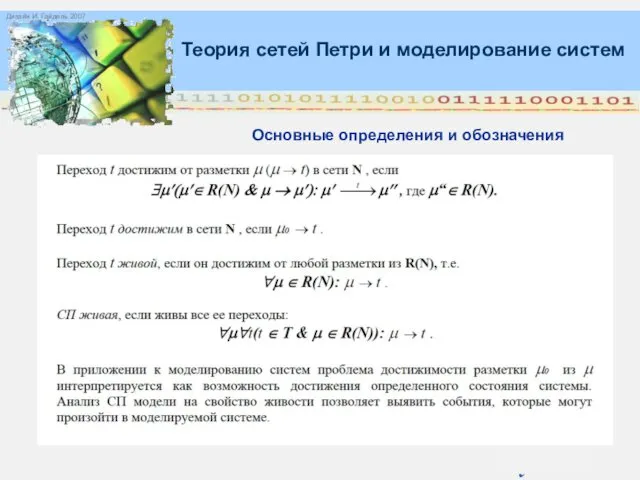
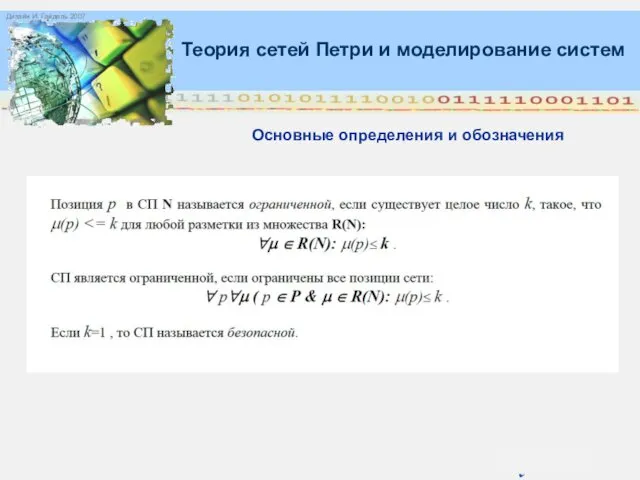
Основные определения и обозначения
= (0,0).
Теория сетей Петри и моделирование систем
Основные определения и обозначения
= (0,0).
Теория сетей Петри и моделирование систем
Основные определения и обозначения
= (0,0).
Теория сетей Петри и моделирование систем
Основные определения и обозначения
= (0,0).
Теория сетей Петри и моделирование систем
Основные определения и обозначения
= (0,0).
Теория сетей Петри и моделирование систем
Основные определения и обозначения
= (0,0).
Теория сетей Петри и моделирование систем
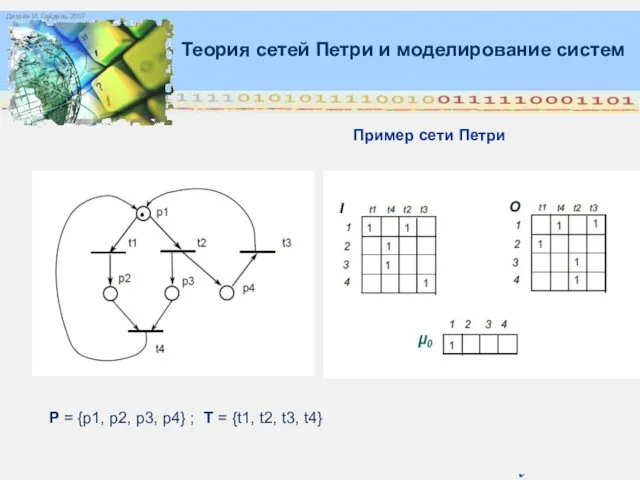
Пример сети Петри
= (0,0).
P = {p1, p2, p3, p4} ;
Пример сети Петри
= (0,0).
P = {p1, p2, p3, p4} ;
Модификации сетей Петри (иерархические сети)
= (0,0).
Иерархические сети (ИСП) являются обобщением
Модификации сетей Петри (иерархические сети)
= (0,0).
Иерархические сети (ИСП) являются обобщением
Модификации сетей Петри (ингибиторные сети)
= (0,0).
В рассмотренных СП недостатком является
Модификации сетей Петри (ингибиторные сети)
= (0,0).
В рассмотренных СП недостатком является
= (0,0).
Ингибиторная сеть представляет собой СП, дополненную специальной функцией инцидентности FI:P×T→{0,1},
= (0,0).
Ингибиторная сеть представляет собой СП, дополненную специальной функцией инцидентности FI:P×T→{0,1},
= (0,0).
При описании функционирования СП отмечалась недетерминируемость следующего рода: если может
= (0,0).
При описании функционирования СП отмечалась недетерминируемость следующего рода: если может
= (0,0).
Правило срабатывания перехода дополним следующим условием: переход t может сработать
= (0,0).
Правило срабатывания перехода дополним следующим условием: переход t может сработать
= (0,0).
При построении моделей очень важным является учет временных характеристик моделируемых
= (0,0).
При построении моделей очень важным является учет временных характеристик моделируемых
Модификации сетей Петри
= (0,0).
Наряду с описанными расширениями СП в современной
Модификации сетей Петри
= (0,0).
Наряду с описанными расширениями СП в современной
 Презентация Электричество вокруг нас.(подготовительная группа0
Презентация Электричество вокруг нас.(подготовительная группа0 Вибрация и действие вибрации на организм человек
Вибрация и действие вибрации на организм человек 23 февраля
23 февраля Урок - презентация для 3 класса Учусь читать дорожные знаки
Урок - презентация для 3 класса Учусь читать дорожные знаки Красная книга Челябинской области
Красная книга Челябинской области Презентация Классный калейдоскоп
Презентация Классный калейдоскоп Массивы (Turbo Pascal)
Массивы (Turbo Pascal) Литературное чтение
Литературное чтение Этапы развития реакции горя при утрате близких. Правила проведения психотерапии
Этапы развития реакции горя при утрате близких. Правила проведения психотерапии Solar energy. Strengths
Solar energy. Strengths Жизнь города. Санкт-Петербург
Жизнь города. Санкт-Петербург Классификация веществ и методов очистки
Классификация веществ и методов очистки Видеоконтроллеры
Видеоконтроллеры Отношения детей дошкольного возраста к педагогу в группе детского сада
Отношения детей дошкольного возраста к педагогу в группе детского сада Метаболизм нуклеотидов
Метаболизм нуклеотидов Животноводство
Животноводство Общие правила транспортировки пострадавшего
Общие правила транспортировки пострадавшего Бегущие волны. Вторичные параметры
Бегущие волны. Вторичные параметры Психологическое здоровье дошкольников
Психологическое здоровье дошкольников Конкурсная работа Гид по Набережным Челнам
Конкурсная работа Гид по Набережным Челнам Мейоз. Образование половых клеток и оплодотворение
Мейоз. Образование половых клеток и оплодотворение Геометрия для малышей Знакомство с геометрической объемной фигурой -куб
Геометрия для малышей Знакомство с геометрической объемной фигурой -куб Добыча алмаза в Якутии
Добыча алмаза в Якутии Fundamentals of Petroleum Engineering
Fundamentals of Petroleum Engineering Архетипы коллективного бессознательного. Сознание и бессознательное. Время и его восприятие. Классификация архетипов
Архетипы коллективного бессознательного. Сознание и бессознательное. Время и его восприятие. Классификация архетипов Средние величины
Средние величины Оценка и корректировка сроков технического обслуживания
Оценка и корректировка сроков технического обслуживания Опера М.И.Глинки Жизнь за царя Иван Сусанин…
Опера М.И.Глинки Жизнь за царя Иван Сусанин…