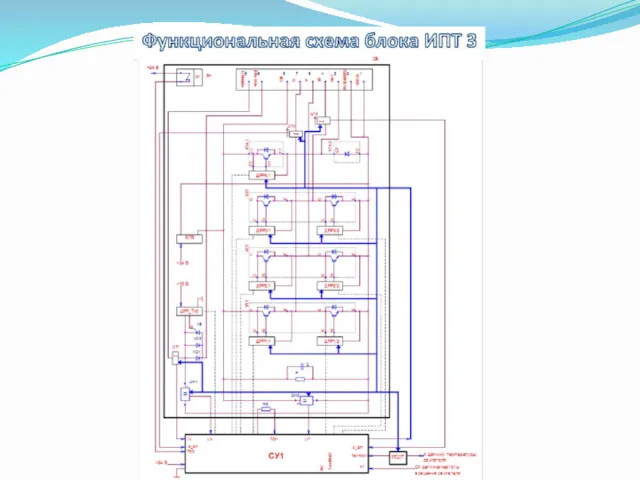
- Тяговый привод ИПТ-3, Топология CAN сети

Содержание
- 2. Суперконденсатор
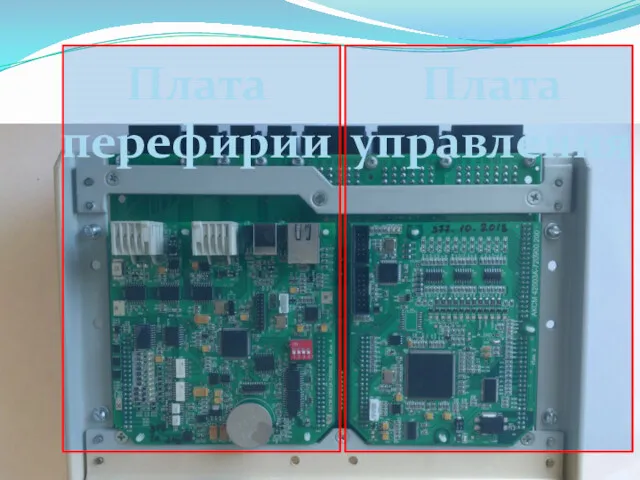
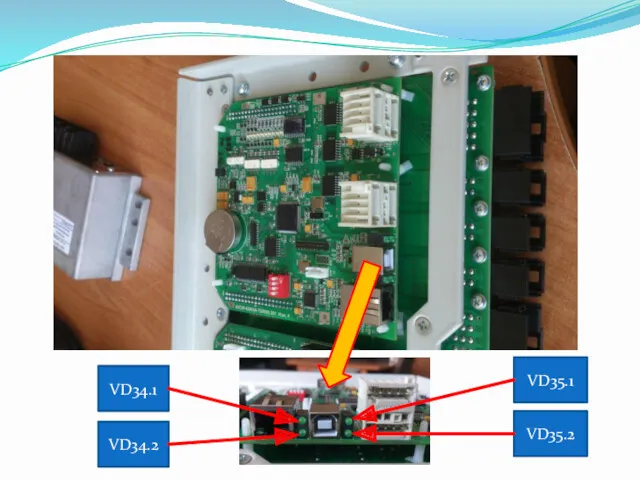
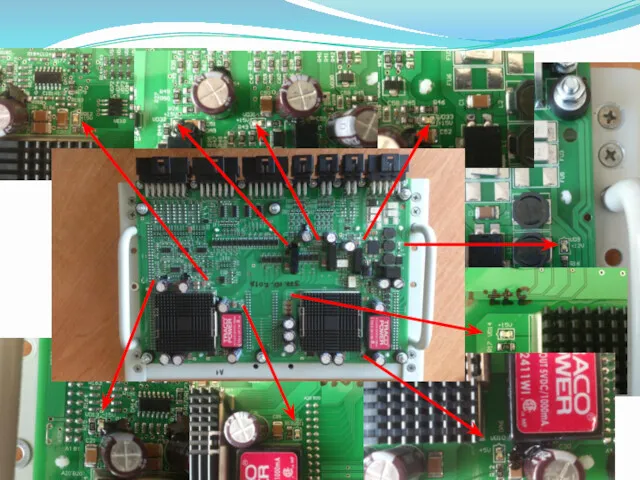
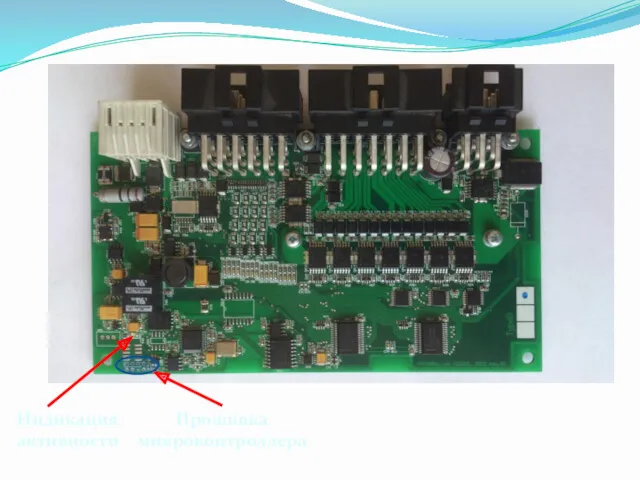
- 4. Плата базовая
- 41. Подключение к сети CAN УСДД предназначено для обработки данных, поступающих от КВС, а также для получения
- 42. МТК -12 выполняет функции УСДД , так же может обеспечивать дополнительный функционал, например управление системой оплаты
- 44. WEB интерфейс
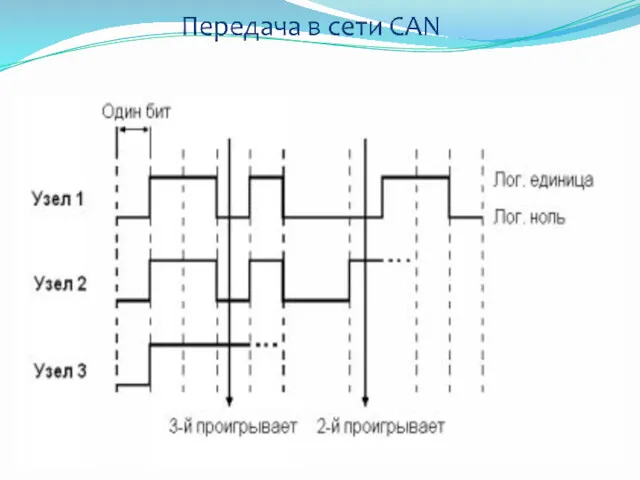
- 45. Что такое CAN? Сеть CAN (Controller Area Network - "область, охваченная сетью контроллеров") представляет собой комплекс
- 46. При управление всеми системами троллейбуса возникает необходимость контролировать и управлять большим количеством сигналов и воздействий в
- 47. Топология сети CAN В любой реализации CAN - носитель (физическая среда передачи данных) интерпретируется как эфир,
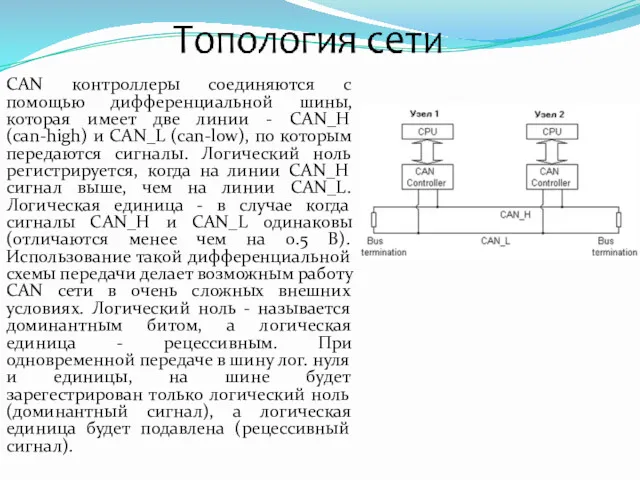
- 48. CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии - CAN_H (can-high) и CAN_L
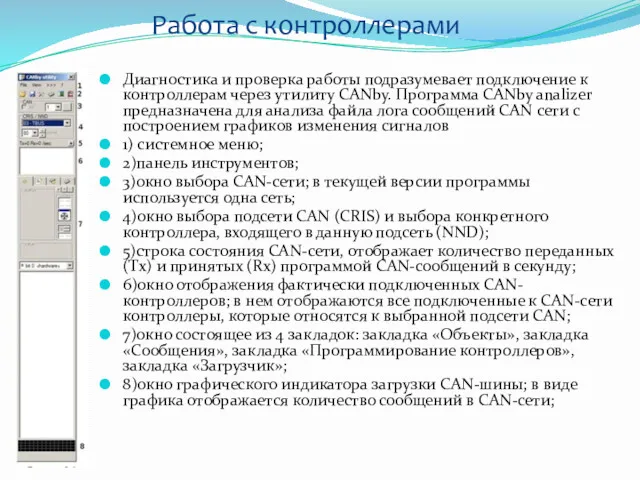
- 50. Работа с контроллерами Диагностика и проверка работы подразумевает подключение к контроллерам через утилиту CANby. Программа CANby
- 51. Работа с индивидуальным окном контроллера
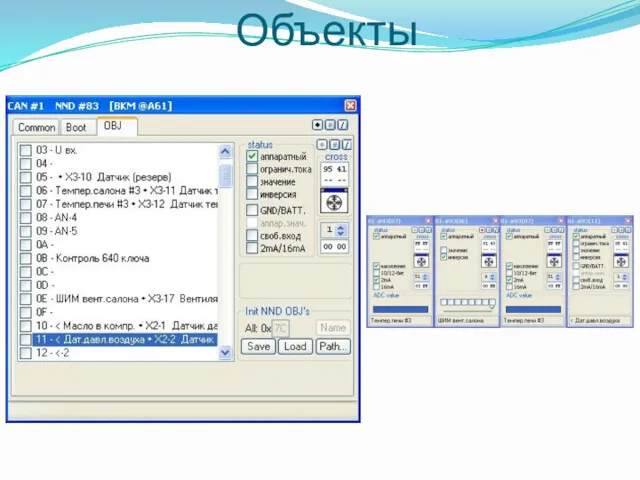
- 52. Объекты
- 54. Скачать презентацию
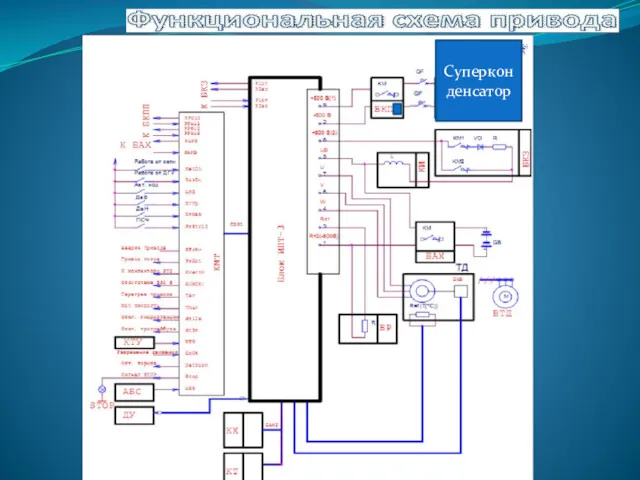
Суперконденсатор
Суперконденсатор
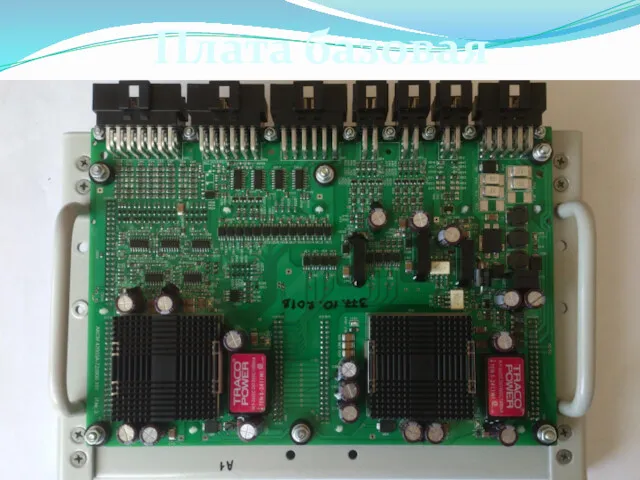
Плата базовая
Плата базовая






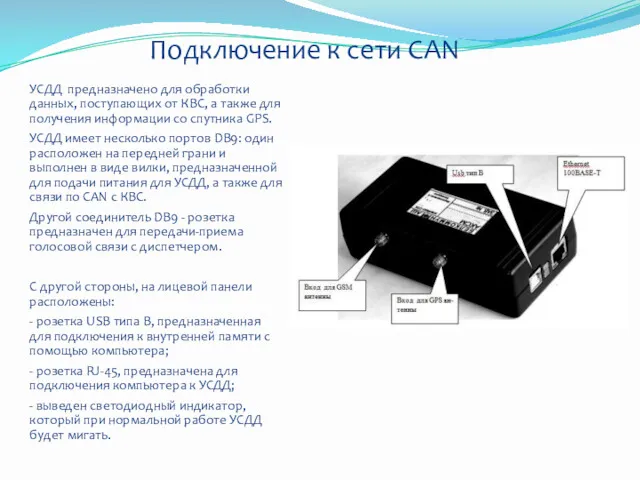
Подключение к сети CAN
УСДД предназначено для обработки данных, поступающих от КВС,
Подключение к сети CAN
УСДД предназначено для обработки данных, поступающих от КВС,
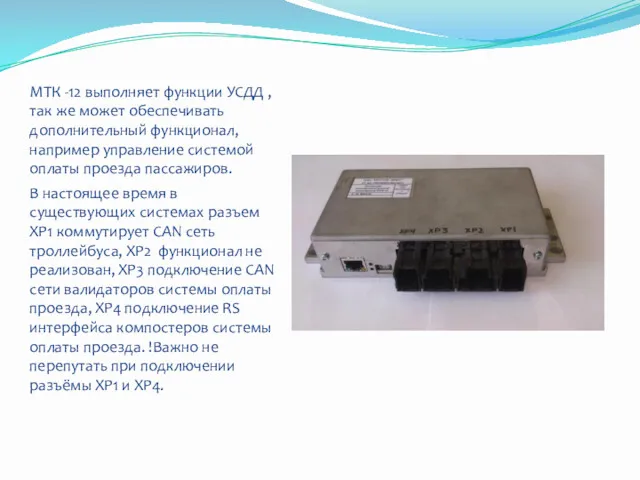
МТК -12 выполняет функции УСДД , так же может обеспечивать дополнительный
МТК -12 выполняет функции УСДД , так же может обеспечивать дополнительный

WEB интерфейс
WEB интерфейс
Что такое CAN?
Сеть CAN (Controller Area Network - "область, охваченная сетью
Что такое CAN?
Сеть CAN (Controller Area Network - "область, охваченная сетью
При управление всеми системами троллейбуса возникает необходимость контролировать и управлять большим
При управление всеми системами троллейбуса возникает необходимость контролировать и управлять большим
Топология сети CAN
В любой реализации CAN - носитель (физическая среда передачи
Топология сети CAN
В любой реализации CAN - носитель (физическая среда передачи
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии
Работа с контроллерами
Диагностика и проверка работы подразумевает подключение к контроллерам через
Работа с контроллерами
Диагностика и проверка работы подразумевает подключение к контроллерам через
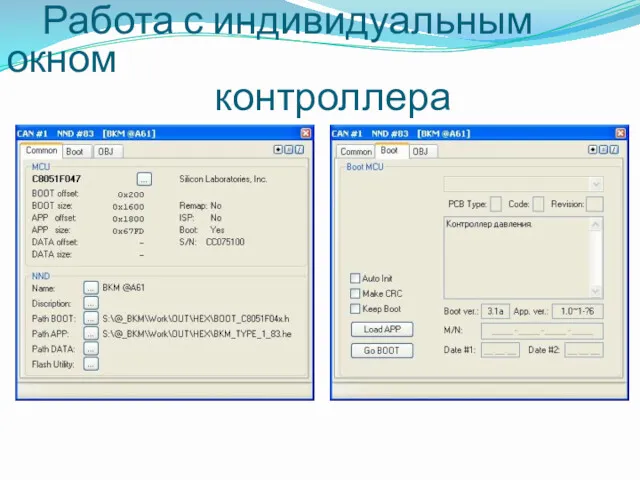
Работа с индивидуальным окном
контроллера
Работа с индивидуальным окном
контроллера
Объекты
Объекты
 Закон больших чисел и центральная предельная теорема
Закон больших чисел и центральная предельная теорема Ну-ка вместе, ну-ка дружно!
Ну-ка вместе, ну-ка дружно! Корень. Родственные слова
Корень. Родственные слова взаимодействия классного руководителя с родителями в организации воспитательной работы учащихся начальной школы
взаимодействия классного руководителя с родителями в организации воспитательной работы учащихся начальной школы Эксплуатация водного транспорта, судовождение
Эксплуатация водного транспорта, судовождение Кроссворд
Кроссворд Үнді-будда мәдениеті
Үнді-будда мәдениеті Электрические машины постоянного тока. Назначение и устройство
Электрические машины постоянного тока. Назначение и устройство Окантовочный шов с открытым и закрытым срезом
Окантовочный шов с открытым и закрытым срезом немного обо мне
немного обо мне Презентация к уроку истории Путешествие в средневековый город
Презентация к уроку истории Путешествие в средневековый город презентация Современный урок в начальной школе с позиции формирования УУд
презентация Современный урок в начальной школе с позиции формирования УУд Нормативно-техническое регулирование в области пожарной безопасности
Нормативно-техническое регулирование в области пожарной безопасности Расселение восточных славян
Расселение восточных славян Триггеры
Триггеры Мифы Древней Греции
Мифы Древней Греции Фармакоэпидемиология и фармакоэкономика. Использование экономической оценки, как элемент принятия решений в медицине
Фармакоэпидемиология и фармакоэкономика. Использование экономической оценки, как элемент принятия решений в медицине Подвесная железная дорога
Подвесная железная дорога Синтаксичні особливості українського ділового мовлення
Синтаксичні особливості українського ділового мовлення Зуботехническое материаловедение
Зуботехническое материаловедение Координаты и векторы
Координаты и векторы презентация Новогодняя сказка
презентация Новогодняя сказка Политическая реклама как форма непрямой коммуникации
Политическая реклама как форма непрямой коммуникации Отчет о реализации первого этапа проекта. Счастливы вместе
Отчет о реализации первого этапа проекта. Счастливы вместе Георгий Валентинович Плеханов
Георгий Валентинович Плеханов Моя семья
Моя семья Entertainment
Entertainment Делимое, делитель, частное
Делимое, делитель, частное