- Ультразвуковой дальномер

Содержание
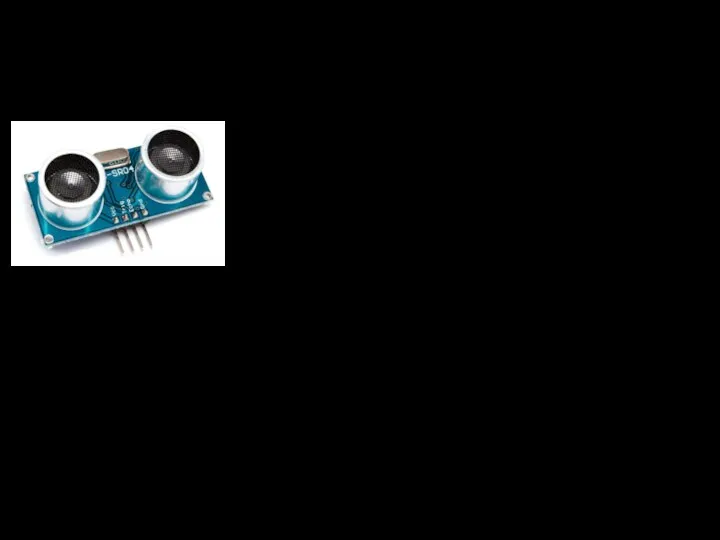
- 2. Ультразвуковой дальномер Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или
- 4. Пример работы УЗ-дальномера Определяем пины: #define TRIG_PIN 7 #define ECHO_PIN 8 setup() Настройка контактов TRIG и
- 5. Пример работы УЗ-дальномера Принимаем звуковую волну и определяем расстояние: int dist = pulseIn(ECHO_PIN, HIGH) / 50;
- 6. Пьезодинамик
- 8. Скачать презентацию
Ультразвуковой дальномер
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как
Ультразвуковой дальномер
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как

Пример работы УЗ-дальномера
Определяем пины:
#define TRIG_PIN 7
#define ECHO_PIN 8
setup()
Настройка контактов TRIG и
Пример работы УЗ-дальномера
Определяем пины: #define TRIG_PIN 7 #define ECHO_PIN 8 setup() Настройка контактов TRIG и
Пример работы УЗ-дальномера
Принимаем звуковую волну и определяем расстояние:
int dist = pulseIn(ECHO_PIN,
Пример работы УЗ-дальномера
Принимаем звуковую волну и определяем расстояние: int dist = pulseIn(ECHO_PIN,

Пьезодинамик
Пьезодинамик
 Ароматические углеводороды. Арены
Ароматические углеводороды. Арены Чеченская война
Чеченская война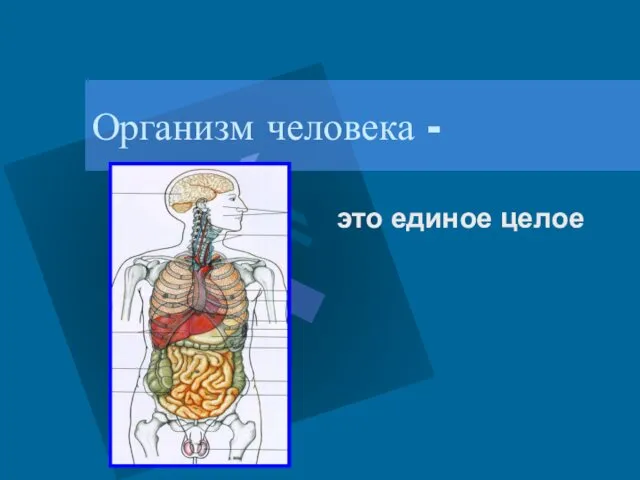 Организм человека - это единое целое
Организм человека - это единое целое 12 апреля-День Космонавтики
12 апреля-День Космонавтики Технології передачі керуючих програм між АРМ технолога-програміста і верстатом з ЧПК
Технології передачі керуючих програм між АРМ технолога-програміста і верстатом з ЧПК Н.В. Гоголь. Место рождения
Н.В. Гоголь. Место рождения 20191101_zhivotnye_afriki_-_kopiya
20191101_zhivotnye_afriki_-_kopiya Контраст. Система Иттена
Контраст. Система Иттена Що історичні пам'ятки розповідають про минуле
Що історичні пам'ятки розповідають про минуле Придбання нової лінії з виробництва домашнього сиру ВАТ Галактон
Придбання нової лінії з виробництва домашнього сиру ВАТ Галактон Урок ОРКСиЭ. Тема :Дружба
Урок ОРКСиЭ. Тема :Дружба Was, were
Was, were Політична роздрібненість Київської Русі
Політична роздрібненість Київської Русі Алгоритмические конструкции. Ветвление
Алгоритмические конструкции. Ветвление Оборудование для приготовления и продажи напитков
Оборудование для приготовления и продажи напитков Программа страхования иностранных студентов
Программа страхования иностранных студентов Творческое занятие Компоненты игровых механик в интерфейсах информационных систем
Творческое занятие Компоненты игровых механик в интерфейсах информационных систем Альтернатива фашизму. Опыт Великобритании и Франции
Альтернатива фашизму. Опыт Великобритании и Франции Различие изомеров по свойствам.
Различие изомеров по свойствам. Будущее в прошлом
Будущее в прошлом Группа в социальном пространстве. Признаки и функции коллектива, методика его формирования
Группа в социальном пространстве. Признаки и функции коллектива, методика его формирования Гражданское право как отрасль права, как наука, как учебная дисциплина
Гражданское право как отрасль права, как наука, как учебная дисциплина География чёрной металлургии
География чёрной металлургии Технология ремонта автосцепного устройства в объёме ДР
Технология ремонта автосцепного устройства в объёме ДР Педагогический совет.
Педагогический совет. Бизнес-план кофейни
Бизнес-план кофейни Болезни губ, языка
Болезни губ, языка Климат и человек
Климат и человек