- Види механічних сенсорів. (Лекція 7)

Содержание
- 2. Зміст Види механічних сенсорів. Представлення про мікросистемні технології. Деформаційні інтелектуальні сенсори. Принципи роботи глобальної системи орієнтування.
- 3. Види механічних сенсорів У механічних сенсорах первинні сигнали про стан досліджуваного об'єкту або процесу мають механічну
- 4. Види механічних сенсорів деформаційні сенсори, первинними сигналами в яких є зміни форми, об'єму або розмірів чутливого
- 5. Види механічних сенсорів Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63
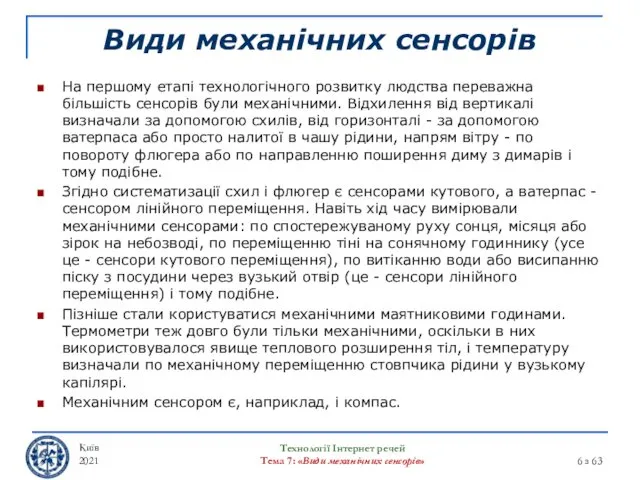
- 6. Види механічних сенсорів На першому етапі технологічного розвитку людства переважна більшість сенсорів були механічними. Відхилення від
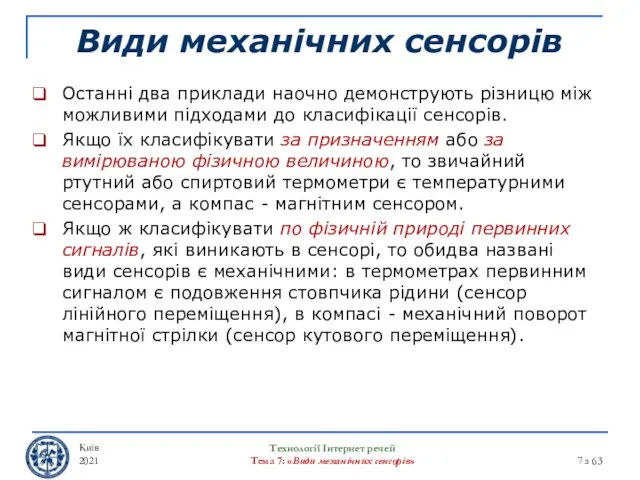
- 7. Види механічних сенсорів Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 Останні
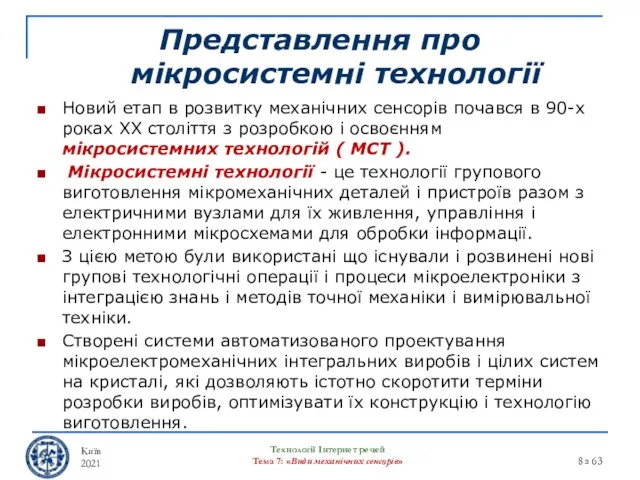
- 8. Представлення про мікросистемні технології Новий етап в розвитку механічних сенсорів почався в 90-х роках ХХ століття
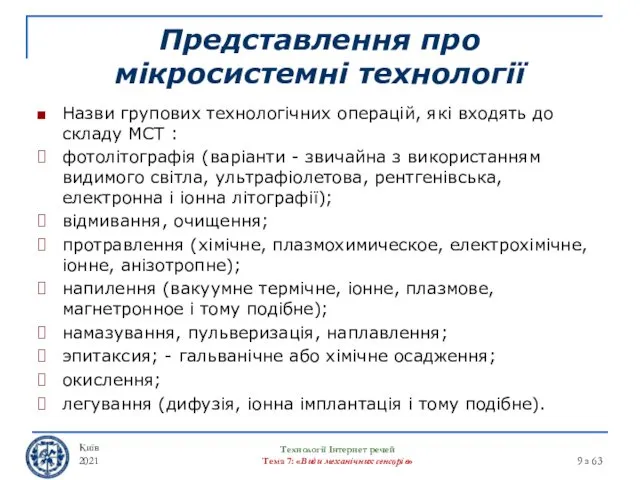
- 9. Представлення про мікросистемні технології Назви групових технологічних операцій, які входять до складу МСТ : фотолітографія (варіанти
- 10. Представлення про мікросистемні технології Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63
- 11. Представлення про мікросистемні технології Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63
- 12. Представлення про мікросистемні технології У США, наприклад, за допомогою таких технологій створений прекрасно функціонуючий мініатюрний літак
- 13. Деформаційні інтелектуальні сенсори Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 Найбільш
- 14. Деформаційні інтелектуальні сенсори У термостатах і автоматичних регуляторах температури з електронагрівачами вигинання біметалічної пластини використовують безпосередньо
- 15. Деформаційні інтелектуальні сенсори Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 Актуатор
- 16. Деформаційні інтелектуальні сенсори Вигинання біметалічної пластини можна використати не лише для комутації електричних ланцюгів, але і
- 17. Деформаційні інтелектуальні сенсори Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 Механічні
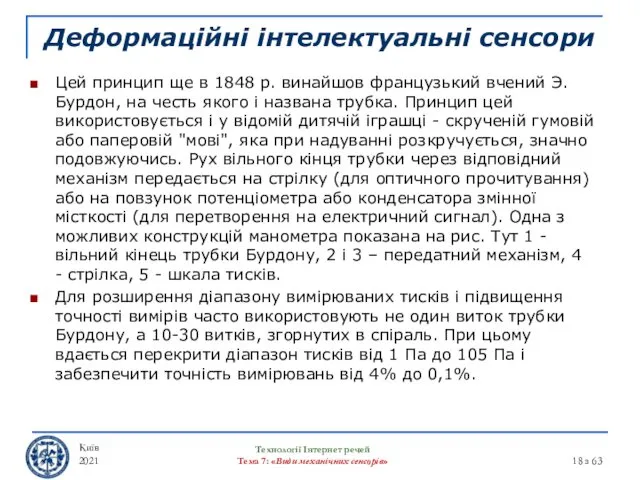
- 18. Деформаційні інтелектуальні сенсори Цей принцип ще в 1848 р. винайшов французький вчений Э. Бурдон, на честь
- 19. Деформаційні інтелектуальні сенсори Сільфон - це еластична гофрована трубка, усередині і ззовні якою створюються різні тиски:
- 20. Деформаційні інтелектуальні сенсори Мембрана - тонка пружна гнучка перегородка між двома об'ємами з різним тиском. Мембрана
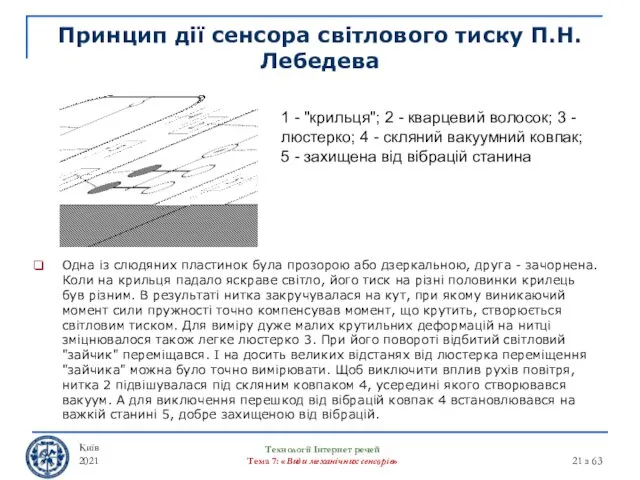
- 21. Принцип дії сенсора світлового тиску П.Н. Лебедева Одна із слюдяних пластинок була прозорою або дзеркальною, друга
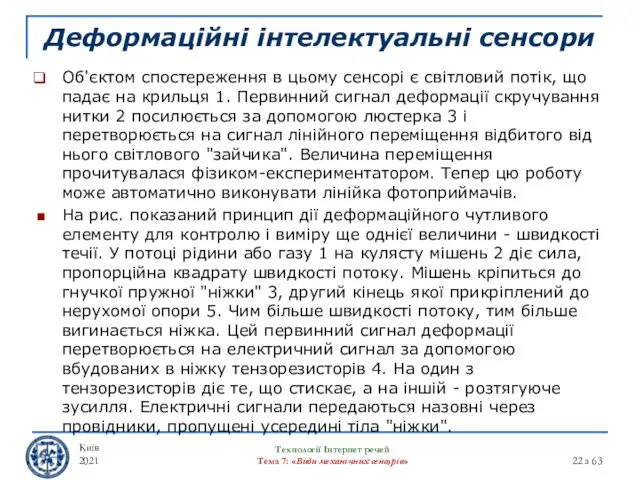
- 22. Деформаційні інтелектуальні сенсори Об'єктом спостереження в цьому сенсорі є світловий потік, що падає на крильця 1.
- 23. Деформаційний елемент для контролю швидкості течії Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів»
- 24. Деформаційні інтелектуальні сенсори При застосуванні мікросистемних технологій з усіх перелічених вище деформаційних елементів найпростіше реалізувати мембрани.
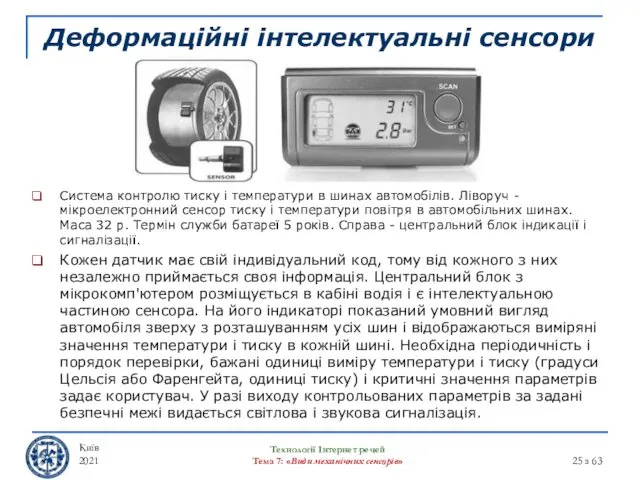
- 25. Деформаційні інтелектуальні сенсори Система контролю тиску і температури в шинах автомобілів. Ліворуч - мікроелектронний сенсор тиску
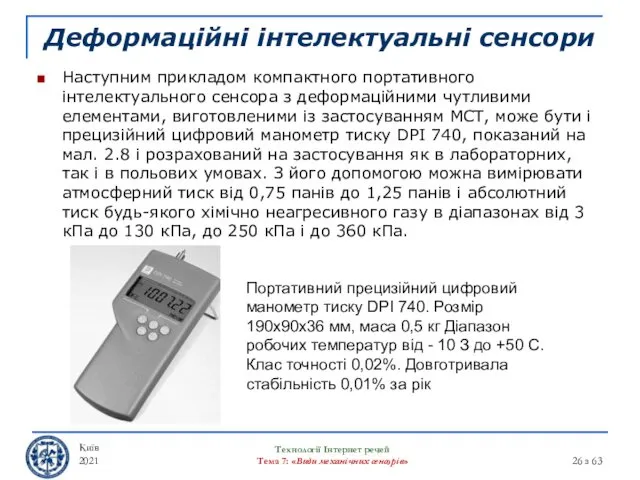
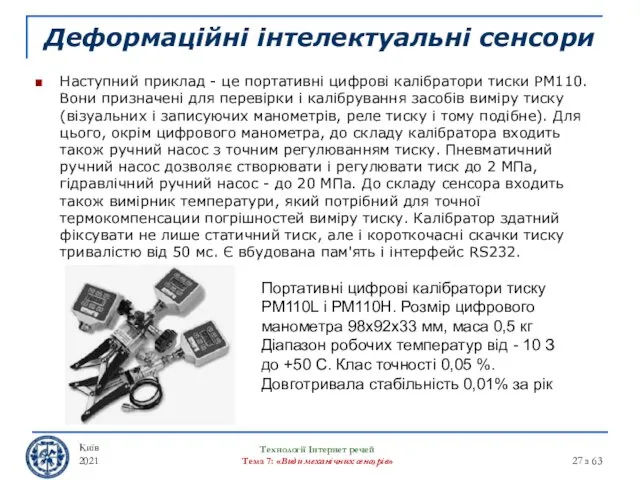
- 26. Деформаційні інтелектуальні сенсори Наступним прикладом компактного портативного інтелектуального сенсора з деформаційними чутливими елементами, виготовленими із застосуванням
- 27. Деформаційні інтелектуальні сенсори Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 Наступний
- 28. Принципи роботи глобальної системи орієнтування Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з
- 29. Принципи роботи глобальної системи орієнтування Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з
- 30. Принципи роботи глобальної системи орієнтування На кожному навігаційному супутнику встановлений високоточний еталонний годинник (для надійності навіть
- 31. Принципи роботи глобальної системи орієнтування Завдяки наявності такої системи супутників завдання точного визначення географічних координат об'єктів
- 32. Сенсори GPS Описані GPS- приймачі - це інтелектуальні сенсори, первинним сигналом для яких є просторове положення
- 33. Сенсори GPS Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 Ліворуч на
- 34. Сенсори GPS Автомобільні GPS навігатори істотно більші, мають більший розмір екрану ( рис. справа), розміщуються на
- 35. Сенсори GPS Професійні GPS навігатори використовуються в авіації, на океанських, морських і річкових судах, локомотивах, автобусах,
- 36. Сенсори GPS GPS приймачі дозволили також по-новому вирішити завдання пересування сліпих людей. У складі портативного інтелектуального
- 37. Сенсори GPS Ще одним важливим застосуванням GPS приймачів стало створення так званих " трекерів " -
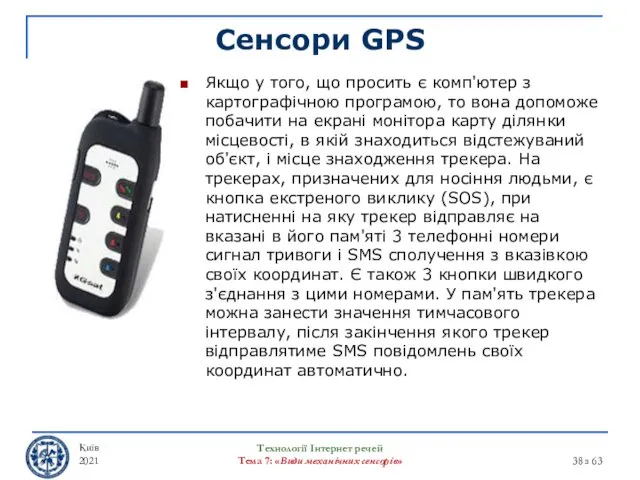
- 38. Сенсори GPS Якщо у того, що просить є комп'ютер з картографічною програмою, то вона допоможе побачити
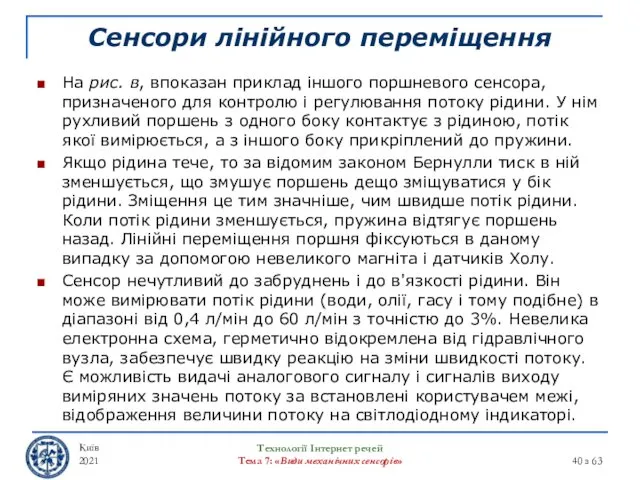
- 39. Сенсори лінійного переміщення Відомим видом механічних чутливих елементів, в яких первинний сигнал з'являється у формі лінійного
- 40. Сенсори лінійного переміщення Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 На
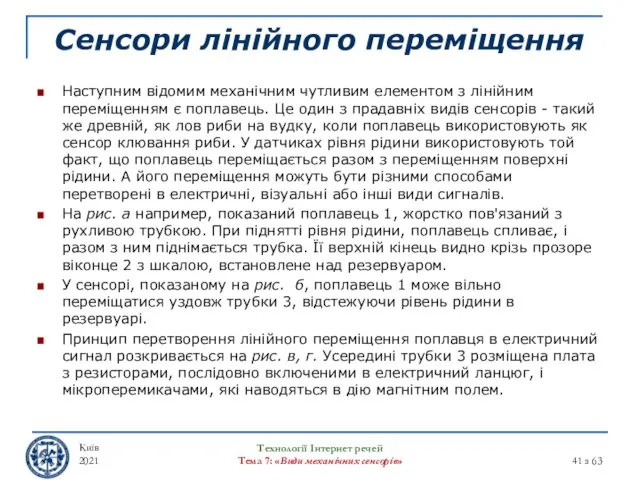
- 41. Сенсори лінійного переміщення Наступним відомим механічним чутливим елементом з лінійним переміщенням є поплавець. Це один з
- 42. Сенсори лінійного переміщення Поплавцеві сенсори: а - з візуальним відображенням; б - з електричним прочитуванням; у
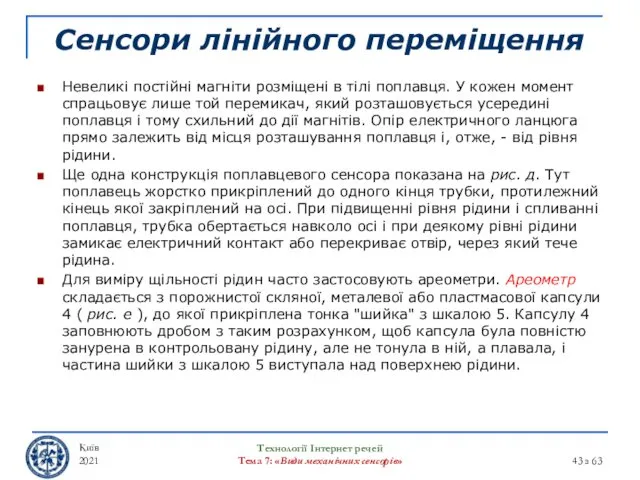
- 43. Сенсори лінійного переміщення Невеликі постійні магніти розміщені в тілі поплавця. У кожен момент спрацьовує лише той
- 44. Сенсори лінійного переміщення Якщо ж щільність рідини зменшиться, то ареометр зануриться в неї глибше. Таким чином,
- 45. Сенсори кутового переміщення Серед сенсорів кутового переміщення виділяють 2 групи: сенсори кута нахилу (крену) і сенсори
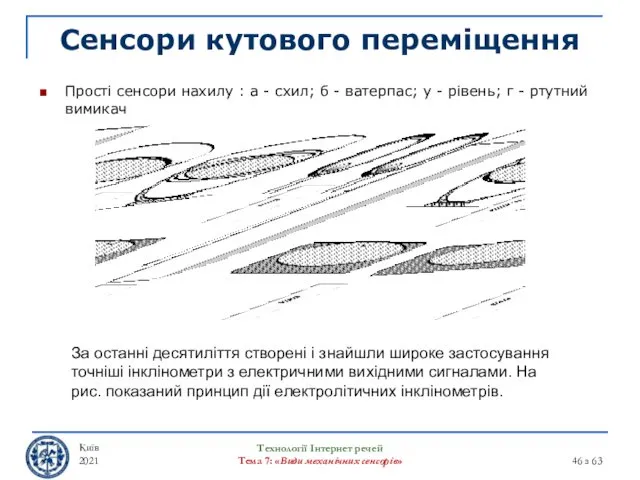
- 46. Сенсори кутового переміщення Прості сенсори нахилу : а - схил; б - ватерпас; у - рівень;
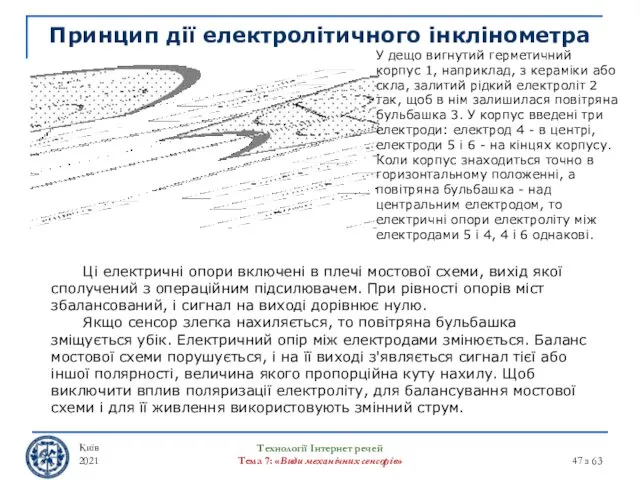
- 47. Принцип дії електролітичного інклінометра Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63
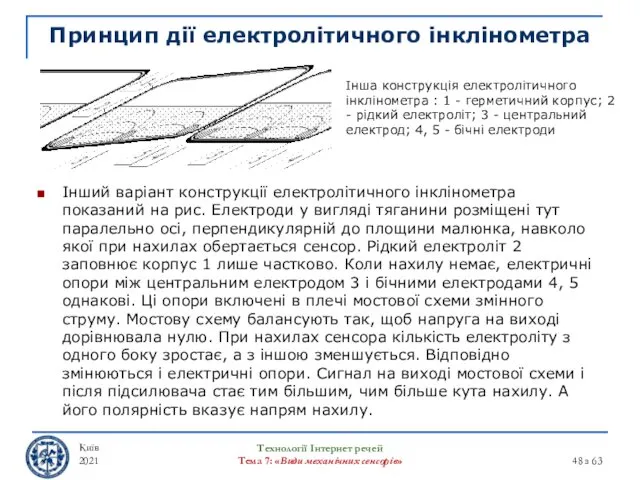
- 48. Принцип дії електролітичного інклінометра Інший варіант конструкції електролітичного інклінометра показаний на рис. Електроди у вигляді тяганини
- 49. Принцип дії електролітичного інклінометра Висока точність, невеликі розміри, простота установки на об'єктах зумовили широкий діапазон їх
- 50. Принцип дії електролітичного інклінометра Деякі промислові зразки таких інклинометрів показани на рис. Двукоординатність досягається шляхом використання
- 51. Абсолютні енкодери Сенсори кута повороту пройшли великий шлях вдосконалення. За багато століть розвитку техніки створені немало
- 52. Абсолютні енкодери Київ 2021 Технології Інтернет речей Тема 7: «Види механічних сенсорів» з 63 Абсолютні энкодери
- 53. Конструкція та принцип дії абсолютного енкодера Один з можливих варіантів кодування диска показаний на рис. справа.
- 54. Конструкція та принцип дії абсолютного енкодера Загальне число можливих п-разрядных двійкових кодів складає 2n. При сучасному
- 55. Принцип дії багатооборотного абсолютного енкодера У абсолютних енкодерах інформація про кутове положення валу зберігається навіть при
- 56. Інкрементні енкодери В інкрементних енкодерах використовують конструкцію, аналогічну показаній на рис., проте рахунковий диск має, як
- 57. Інкрементні енкодери Якщо диск може обертатися в обох напрямах, і інформація про це важлива, то блок
- 58. Інкрементні енкодери Для механічного з'єднання валу кутового энкодера з контрольованим механізмом використовують спеціальні з'єднувачі, які, з
- 59. Інтелектуальні тахометри Кутові енкодери нині все частіше застосовують спільно з інтелектуальними електронними модулями. Такі сенсори називають
- 60. Роторні і турбінні сенсори Ще одним прикладом сенсорів, в яких обертання є первинним механічним сигналом, служать
- 61. Промислові сенсори для виміру об'ємного потоку рідини На рис. вгорі справа показаний роторний сенсор з прозорою
- 62. Питання для самоперевірки 1. Що таке механічні сенсори переміщення? 2. Що є основою глобальної системи орієнтування?
- 64. Скачать презентацию
Зміст
Види механічних сенсорів.
Представлення про мікросистемні технології.
Деформаційні інтелектуальні сенсори.
Принципи
Зміст
Види механічних сенсорів.
Представлення про мікросистемні технології.
Деформаційні інтелектуальні сенсори.
Принципи
Види механічних сенсорів
У механічних сенсорах первинні сигнали про стан досліджуваного об'єкту
Види механічних сенсорів
У механічних сенсорах первинні сигнали про стан досліджуваного об'єкту
Види механічних сенсорів
деформаційні сенсори, первинними сигналами в яких є зміни форми,
Види механічних сенсорів
деформаційні сенсори, первинними сигналами в яких є зміни форми,
Види механічних сенсорів
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Види механічних сенсорів
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Види механічних сенсорів
На першому етапі технологічного розвитку людства переважна більшість сенсорів
Види механічних сенсорів
На першому етапі технологічного розвитку людства переважна більшість сенсорів
Види механічних сенсорів
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Види механічних сенсорів
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Представлення про мікросистемні технології
Новий етап в розвитку механічних сенсорів почався
Представлення про мікросистемні технології
Новий етап в розвитку механічних сенсорів почався
Представлення про мікросистемні технології
Назви групових технологічних операцій, які входять до
Представлення про мікросистемні технології
Назви групових технологічних операцій, які входять до

Представлення про мікросистемні технології
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
Представлення про мікросистемні технології
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»

Представлення про мікросистемні технології
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних
Представлення про мікросистемні технології
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних
Представлення про мікросистемні технології
У США, наприклад, за допомогою таких технологій створений
Представлення про мікросистемні технології
У США, наприклад, за допомогою таких технологій створений
Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з

Деформаційні інтелектуальні сенсори
У термостатах і автоматичних регуляторах температури з електронагрівачами вигинання
Деформаційні інтелектуальні сенсори
У термостатах і автоматичних регуляторах температури з електронагрівачами вигинання

Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Деформаційні інтелектуальні сенсори
Вигинання біметалічної пластини можна використати не лише для комутації
Деформаційні інтелектуальні сенсори
Вигинання біметалічної пластини можна використати не лише для комутації

Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Деформаційні інтелектуальні сенсори
Цей принцип ще в 1848 р. винайшов французький вчений
Деформаційні інтелектуальні сенсори
Цей принцип ще в 1848 р. винайшов французький вчений
Деформаційні інтелектуальні сенсори
Сільфон - це еластична гофрована трубка, усередині і ззовні
Деформаційні інтелектуальні сенсори
Сільфон - це еластична гофрована трубка, усередині і ззовні

Деформаційні інтелектуальні сенсори
Мембрана - тонка пружна гнучка перегородка між двома об'ємами
Деформаційні інтелектуальні сенсори
Мембрана - тонка пружна гнучка перегородка між двома об'ємами
Принцип дії сенсора світлового тиску П.Н. Лебедева
Одна із слюдяних пластинок була
Принцип дії сенсора світлового тиску П.Н. Лебедева
Одна із слюдяних пластинок була
Деформаційні інтелектуальні сенсори
Об'єктом спостереження в цьому сенсорі є світловий потік, що
Деформаційні інтелектуальні сенсори
Об'єктом спостереження в цьому сенсорі є світловий потік, що

Деформаційний елемент для контролю швидкості течії
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних
Деформаційний елемент для контролю швидкості течії
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних

Деформаційні інтелектуальні сенсори
При застосуванні мікросистемних технологій з усіх перелічених вище деформаційних
Деформаційні інтелектуальні сенсори
При застосуванні мікросистемних технологій з усіх перелічених вище деформаційних
Деформаційні інтелектуальні сенсори
Система контролю тиску і температури в шинах автомобілів. Ліворуч
Деформаційні інтелектуальні сенсори
Система контролю тиску і температури в шинах автомобілів. Ліворуч
Деформаційні інтелектуальні сенсори
Наступним прикладом компактного портативного інтелектуального сенсора з деформаційними чутливими
Деформаційні інтелектуальні сенсори
Наступним прикладом компактного портативного інтелектуального сенсора з деформаційними чутливими
Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Деформаційні інтелектуальні сенсори
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Принципи роботи глобальної системи орієнтування
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
Принципи роботи глобальної системи орієнтування
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»

Принципи роботи глобальної системи орієнтування
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
Принципи роботи глобальної системи орієнтування
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
Принципи роботи глобальної системи орієнтування
На кожному навігаційному супутнику встановлений високоточний еталонний
Принципи роботи глобальної системи орієнтування
На кожному навігаційному супутнику встановлений високоточний еталонний
Принципи роботи глобальної системи орієнтування
Завдяки наявності такої системи супутників завдання точного
Принципи роботи глобальної системи орієнтування
Завдяки наявності такої системи супутників завдання точного
Сенсори GPS
Описані GPS- приймачі - це інтелектуальні сенсори, первинним сигналом для
Сенсори GPS
Описані GPS- приймачі - це інтелектуальні сенсори, первинним сигналом для

Сенсори GPS
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з 63
Ліворуч
Сенсори GPS
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з 63
Ліворуч
Сенсори GPS
Автомобільні GPS навігатори істотно більші, мають більший розмір екрану (
Сенсори GPS
Автомобільні GPS навігатори істотно більші, мають більший розмір екрану (
Сенсори GPS
Професійні GPS навігатори використовуються в авіації, на океанських, морських і
Сенсори GPS
Професійні GPS навігатори використовуються в авіації, на океанських, морських і
Сенсори GPS
GPS приймачі дозволили також по-новому вирішити завдання пересування сліпих людей.
Сенсори GPS
GPS приймачі дозволили також по-новому вирішити завдання пересування сліпих людей.

Сенсори GPS
Ще одним важливим застосуванням GPS приймачів стало створення так званих
Сенсори GPS
Ще одним важливим застосуванням GPS приймачів стало створення так званих
Сенсори GPS
Якщо у того, що просить є комп'ютер з картографічною програмою,
Сенсори GPS
Якщо у того, що просить є комп'ютер з картографічною програмою,

Сенсори лінійного переміщення
Відомим видом механічних чутливих елементів, в яких первинний сигнал
Сенсори лінійного переміщення
Відомим видом механічних чутливих елементів, в яких первинний сигнал
Сенсори лінійного переміщення
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Сенсори лінійного переміщення
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Сенсори лінійного переміщення
Наступним відомим механічним чутливим елементом з лінійним переміщенням є
Сенсори лінійного переміщення
Наступним відомим механічним чутливим елементом з лінійним переміщенням є

Сенсори лінійного переміщення
Поплавцеві сенсори: а - з візуальним відображенням; б -
Сенсори лінійного переміщення
Поплавцеві сенсори: а - з візуальним відображенням; б -
Сенсори лінійного переміщення
Невеликі постійні магніти розміщені в тілі поплавця. У кожен
Сенсори лінійного переміщення
Невеликі постійні магніти розміщені в тілі поплавця. У кожен

Сенсори лінійного переміщення
Якщо ж щільність рідини зменшиться, то ареометр зануриться в
Сенсори лінійного переміщення
Якщо ж щільність рідини зменшиться, то ареометр зануриться в
Сенсори кутового переміщення
Серед сенсорів кутового переміщення виділяють 2 групи: сенсори кута
Сенсори кутового переміщення
Серед сенсорів кутового переміщення виділяють 2 групи: сенсори кута
Сенсори кутового переміщення
Прості сенсори нахилу : а - схил; б -
Сенсори кутового переміщення
Прості сенсори нахилу : а - схил; б -
Принцип дії електролітичного інклінометра
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
Принцип дії електролітичного інклінометра
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
Принцип дії електролітичного інклінометра
Інший варіант конструкції електролітичного інклінометра показаний на рис.
Принцип дії електролітичного інклінометра
Інший варіант конструкції електролітичного інклінометра показаний на рис.
Принцип дії електролітичного інклінометра
Висока точність, невеликі розміри, простота установки на об'єктах
Принцип дії електролітичного інклінометра
Висока точність, невеликі розміри, простота установки на об'єктах

Принцип дії електролітичного інклінометра
Деякі промислові зразки таких інклинометрів показани на рис.
Принцип дії електролітичного інклінометра
Деякі промислові зразки таких інклинометрів показани на рис.
Абсолютні енкодери
Сенсори кута повороту пройшли великий шлях вдосконалення. За багато століть
Абсолютні енкодери
Сенсори кута повороту пройшли великий шлях вдосконалення. За багато століть
Абсолютні енкодери
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Абсолютні енкодери
Київ
2021
Технології Інтернет речей
Тема 7: «Види механічних сенсорів»
з
Конструкція та принцип дії абсолютного енкодера
Один з можливих варіантів кодування диска
Конструкція та принцип дії абсолютного енкодера
Один з можливих варіантів кодування диска
Конструкція та принцип дії абсолютного енкодера
Загальне число можливих п-разрядных двійкових кодів
Конструкція та принцип дії абсолютного енкодера
Загальне число можливих п-разрядных двійкових кодів

Принцип дії багатооборотного абсолютного енкодера
У абсолютних енкодерах інформація про кутове положення
Принцип дії багатооборотного абсолютного енкодера
У абсолютних енкодерах інформація про кутове положення
Інкрементні енкодери
В інкрементних енкодерах використовують конструкцію, аналогічну показаній на рис., проте
Інкрементні енкодери
В інкрементних енкодерах використовують конструкцію, аналогічну показаній на рис., проте
Інкрементні енкодери
Якщо диск може обертатися в обох напрямах, і інформація про
Інкрементні енкодери
Якщо диск може обертатися в обох напрямах, і інформація про

Інкрементні енкодери
Для механічного з'єднання валу кутового энкодера з контрольованим механізмом використовують
Інкрементні енкодери
Для механічного з'єднання валу кутового энкодера з контрольованим механізмом використовують
Інтелектуальні тахометри
Кутові енкодери нині все частіше застосовують спільно з інтелектуальними електронними
Інтелектуальні тахометри
Кутові енкодери нині все частіше застосовують спільно з інтелектуальними електронними
Роторні і турбінні сенсори
Ще одним прикладом сенсорів, в яких обертання є
Роторні і турбінні сенсори
Ще одним прикладом сенсорів, в яких обертання є

Промислові сенсори для виміру об'ємного потоку рідини
На рис. вгорі справа показаний
Промислові сенсори для виміру об'ємного потоку рідини
На рис. вгорі справа показаний
Питання для самоперевірки
1. Що таке механічні сенсори переміщення?
2. Що є
Питання для самоперевірки
1. Що таке механічні сенсори переміщення?
2. Що є
 Дизайн и архитектура. Итоговое тестирование. ИЗО. 7 класс
Дизайн и архитектура. Итоговое тестирование. ИЗО. 7 класс Выбор дверей и проемов для интерьера квартиры
Выбор дверей и проемов для интерьера квартиры Виброзащита оборудования: способы снижения вибрации машин
Виброзащита оборудования: способы снижения вибрации машин Цитаты
Цитаты Урок-презентация.Тема Химия и Первая Мировая война
Урок-презентация.Тема Химия и Первая Мировая война Структура Вселенной
Структура Вселенной Суть і способи процесів різання
Суть і способи процесів різання Урок по теме Боги древних славян 3 класс (Программа Начальная школа XXI века)
Урок по теме Боги древних славян 3 класс (Программа Начальная школа XXI века) Снегурочка Александр Николаевич Островский
Снегурочка Александр Николаевич Островский Электромагнитное излучение и его влияние на здоровье человека
Электромагнитное излучение и его влияние на здоровье человека История становления специальной педагогики в России
История становления специальной педагогики в России Презентация Блокнот
Презентация Блокнот Отстойники. Классификация
Отстойники. Классификация Презентация к проекту: Очистка поверхности медного сплава
Презентация к проекту: Очистка поверхности медного сплава Центральная и Восточная Европа
Центральная и Восточная Европа The last film I saw
The last film I saw Волонтёрское движение
Волонтёрское движение Информация ее хранение и способы передачи (2)
Информация ее хранение и способы передачи (2) Платформы
Платформы Политические и правовые учения древнего мира
Политические и правовые учения древнего мира Фенолы. Классификация фенолов
Фенолы. Классификация фенолов Организация системы контроля доступа и видеонаблюдения в учреждении образования
Организация системы контроля доступа и видеонаблюдения в учреждении образования Правовое регулирование профессиональной медицинской деятельности
Правовое регулирование профессиональной медицинской деятельности Сера. Характеристика химического элемента и простого вещества
Сера. Характеристика химического элемента и простого вещества Поиск, накопление и обработка научной информации
Поиск, накопление и обработка научной информации Проектная деятельностьСказка в нашей жизни
Проектная деятельностьСказка в нашей жизни Япония на пути модернизации
Япония на пути модернизации Презентация Пасхальная тема Диск
Презентация Пасхальная тема Диск