- Замкнутые СУЭП постоянного тока. Замкнутые СУЭП на базе АД. (Тема 3)

Содержание
- 2. Подчиненное регулирование координат
- 3. Настройка первого контура на технический оптимум Чтобы после замыкания контура ООС обеспечивались требуемые статические и динамические
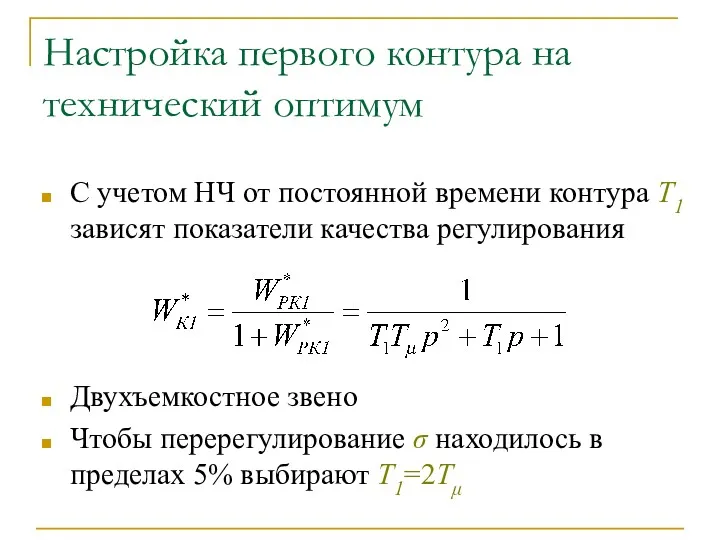
- 4. Настройка первого контура на технический оптимум С учетом НЧ от постоянной времени контура Т1 зависят показатели
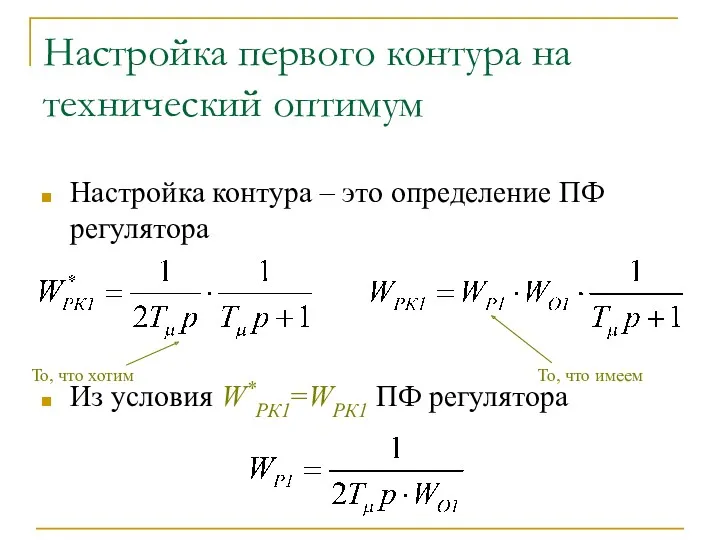
- 5. Настройка первого контура на технический оптимум Настройка контура – это определение ПФ регулятора Из условия W*РК1=WРК1
- 6. Настройка второго контура на технический оптимум
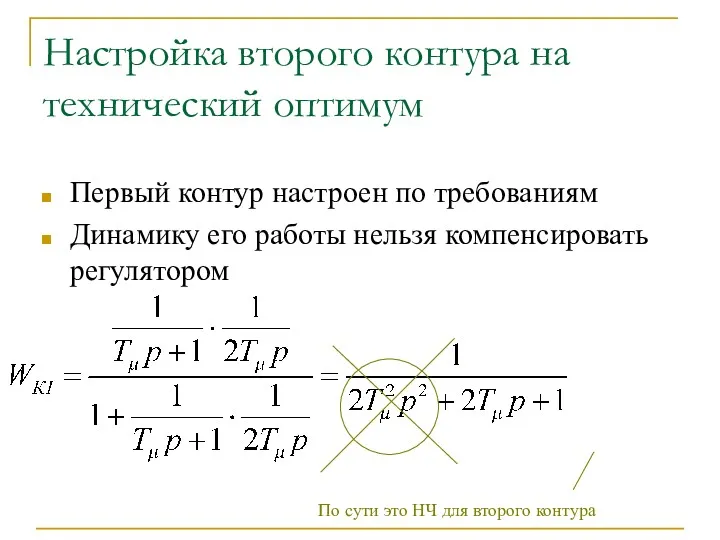
- 7. Настройка второго контура на технический оптимум Первый контур настроен по требованиям Динамику его работы нельзя компенсировать
- 8. Настройка второго контура на технический оптимум Желаемая ПФ разомкнутого второго контура Постоянная времени второго контура Т2
- 9. Настройка второго контура на технический оптимум Настройка второго контура Из условия W*РК2=WРК2 ПФ регулятора То, что
- 10. Настройка произвольного контура на технический оптимум Следующее контуры настраиваются так же Замыкаем предыдущий контур Записываем желаемую
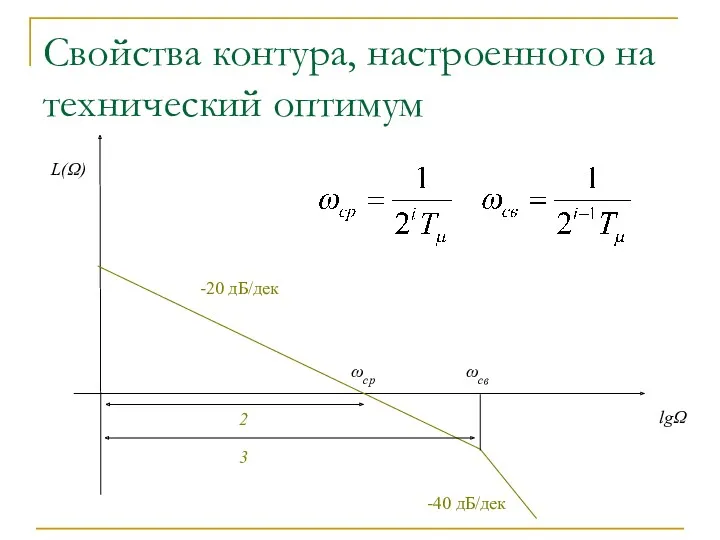
- 11. Свойства контура, настроенного на технический оптимум ωср lgΩ L(Ω) -20 дБ/дек ωсв -40 дБ/дек 2 3
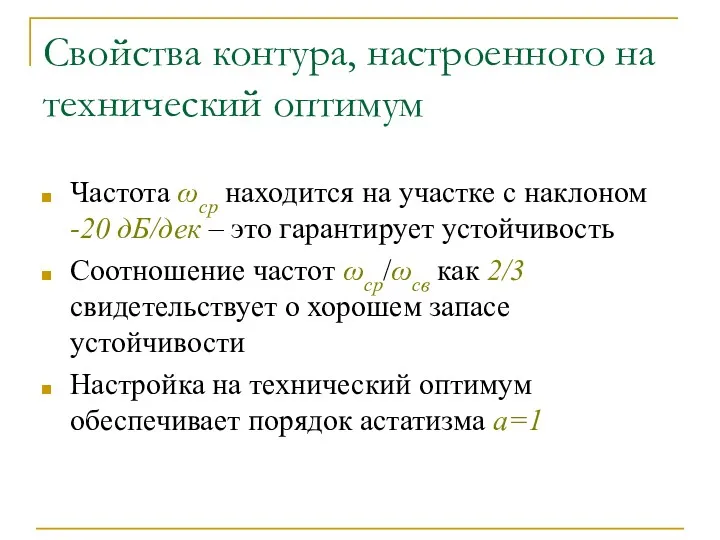
- 12. Свойства контура, настроенного на технический оптимум Частота ωср находится на участке с наклоном -20 дБ/дек –
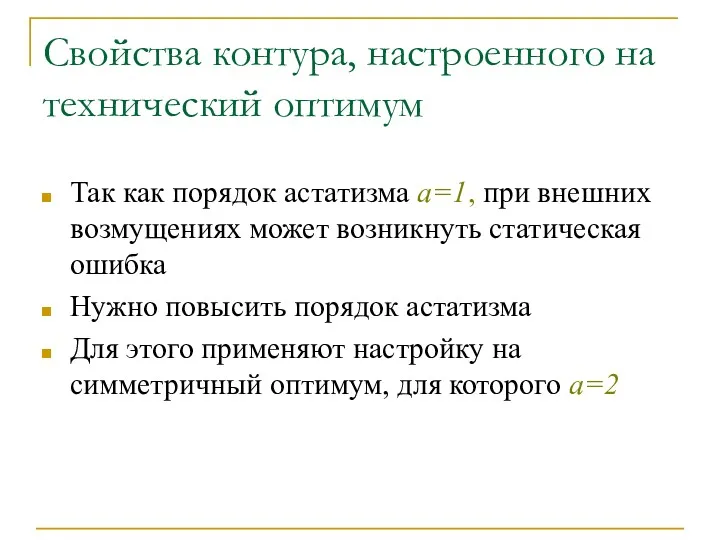
- 13. Свойства контура, настроенного на технический оптимум Так как порядок астатизма а=1, при внешних возмущениях может возникнуть
- 14. Свойства контура, настроенного на симметричный оптимум ωср lgΩ L(Ω) -20 дБ/дек ωсв -40 дБ/дек ωсн -40
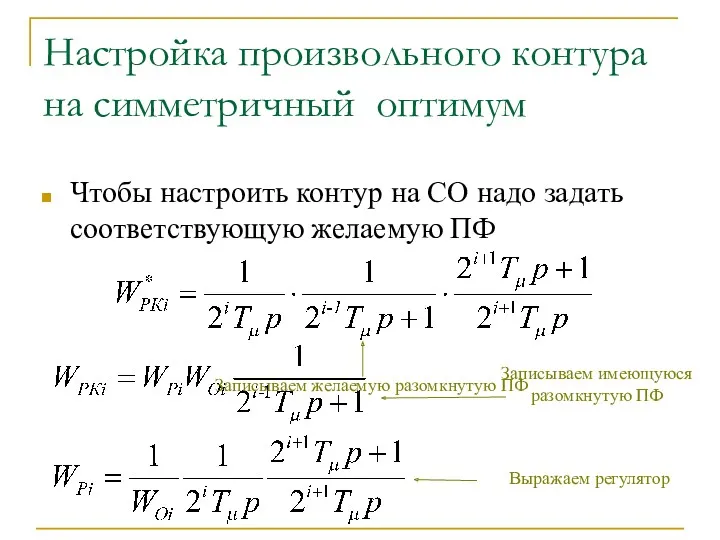
- 15. Настройка произвольного контура на симметричный оптимум Чтобы настроить контур на СО надо задать соответствующую желаемую ПФ
- 16. Сравнение технического и симметричного оптимума ωср lgΩ L(Ω) -20 дБ/дек ωсв -40 дБ/дек ωсн -40 дБ/дек
- 17. Сравнение технического и симметричного оптимума t h(t) ТО СО 4,3 % 43 % tз 5 %
- 18. Настройка подчиненного регулирования в электроприводе
- 19. Настройка подчиненного регулирования в электроприводе Допущения Пренебрегаем влиянием обратной связи по ЭДС Пренебрегаем нагрузкой Настраиваем на
- 20. Настройка подчиненного регулирования в электроприводе Влияние обратной связи по ЭДС Медленно меняющееся возмущение Незначительно влияет на
- 21. Настройка подчиненного регулирования в электроприводе Контур скорости настраивают на СО Регулятор скорости (2 контур) это ПИ-регулятор
- 22. Замкнутые СУЭП на базе АД Тема 4
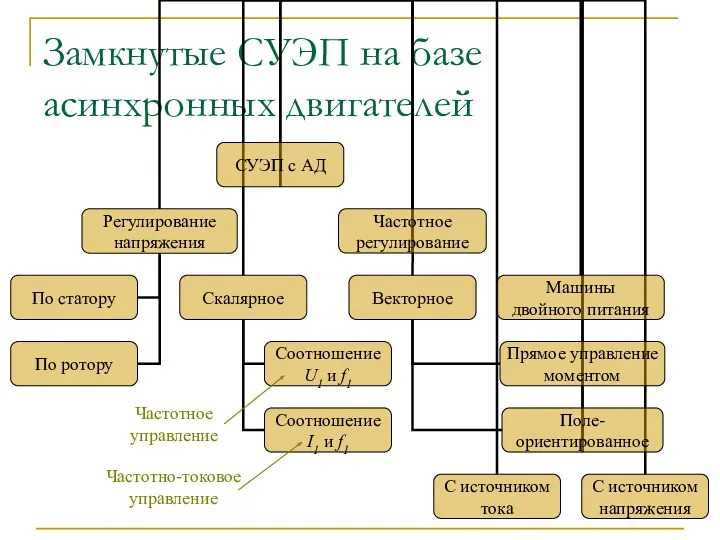
- 23. Замкнутые СУЭП на базе асинхронных двигателей Электрические преобразователи Тиристорные регуляторы напряжения – софт стартеры или устройства
- 24. Замкнутые СУЭП на базе асинхронных двигателей Частотное управление Частотно-токовое управление
- 25. Регулирование напряжения статора Изменение напряжения АД в разомкнутом электроприводе Диапазон D=1..1,5:1 Перегрузочная способность λМ в квадратичной
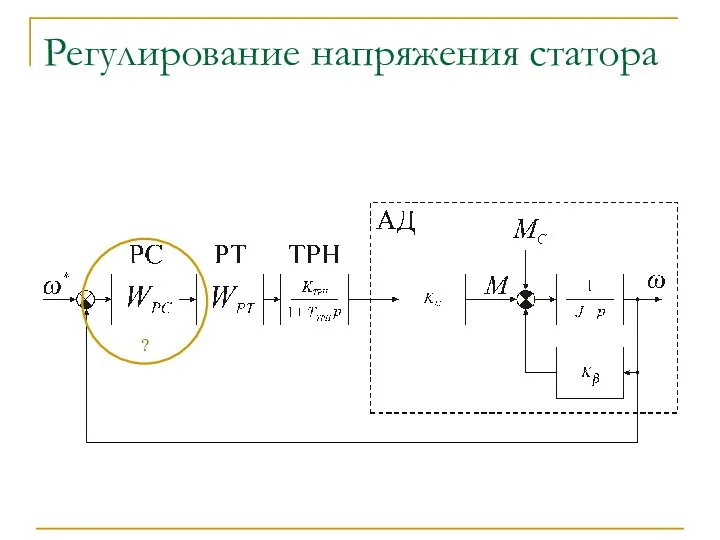
- 26. Регулирование напряжения статора ?
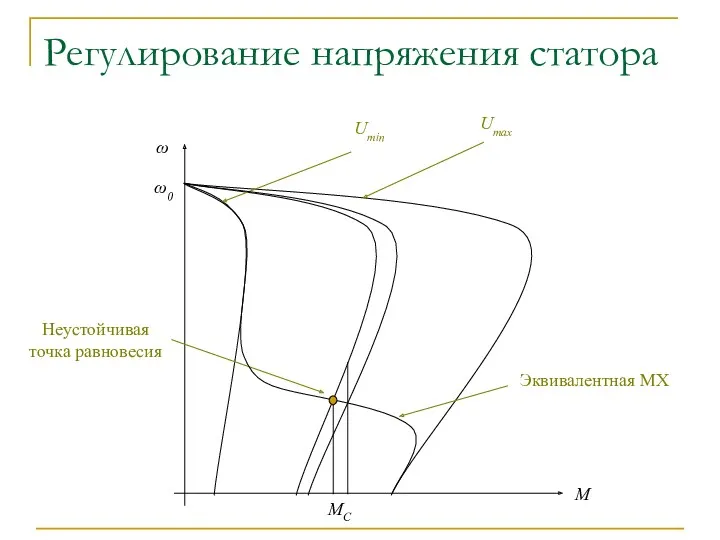
- 27. Регулирование напряжения статора М ω Umin Umax ω0 Эквивалентная МХ МС Неустойчивая точка равновесия
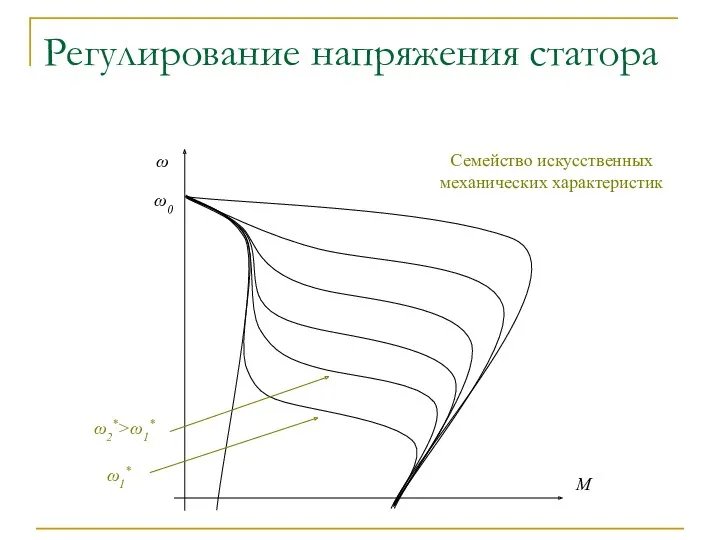
- 28. Регулирование напряжения статора М ω ω0 Семейство искусственных механических характеристик ω1* ω2*>ω1*
- 29. Регулирование напряжения статора Токовая отсечка ТО включает ООС по току только если I1>IОТС Полученный коэффициент нужно
- 30. Регулирование напряжения статора М ω ω0 ω ω0 I1 IОТС MОТС
- 31. Регулирование напряжения статора ?
- 32. Регулирование напряжения статора При настройке регулятора WРС требуется линеаризовать двигатель Диапазон регулирования D=20:1
- 33. Регулирование напряжения ротора Изменение напряжения ротора в разомкнутом АВК Диапазон D=2..3:1 Габариты зависят от диапазона регулирования
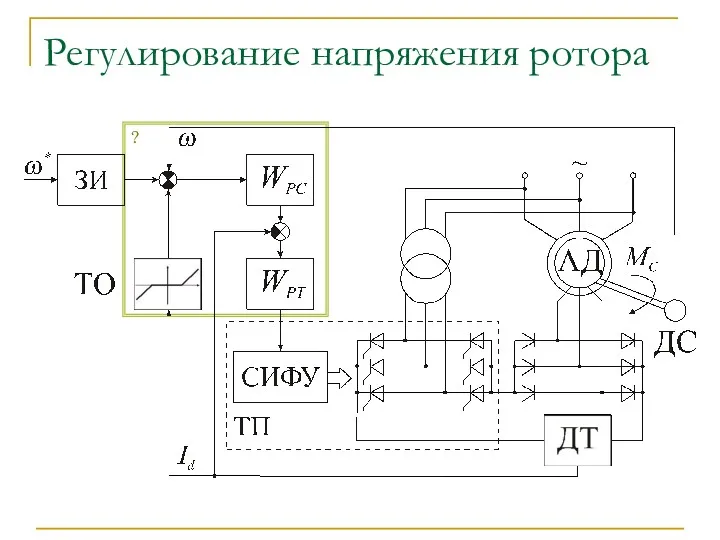
- 34. Регулирование напряжения ротора ?
- 35. Регулирование напряжения ротора М ω ω0 Семейство искусственных механических характеристик Ed = 0 ω0 э1 ω0
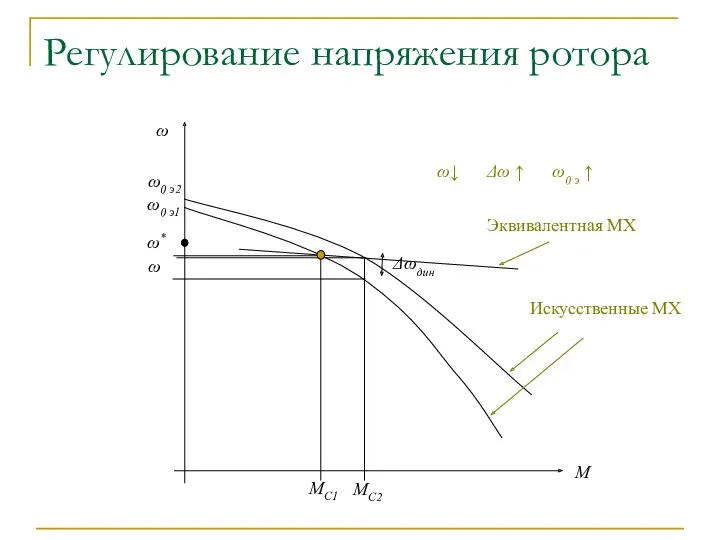
- 36. Регулирование напряжения ротора М ω ω0 э1 ω* МС1 МС2 ω ω↓ Δω ↑ ω0 э
- 37. Регулирование напряжения ротора ? ?
- 38. Регулирование напряжения ротора При настройке регуляторов WРТ и WРС требуется линеаризовать двигатель Диапазон регулирования D=20:1
- 40. Скачать презентацию
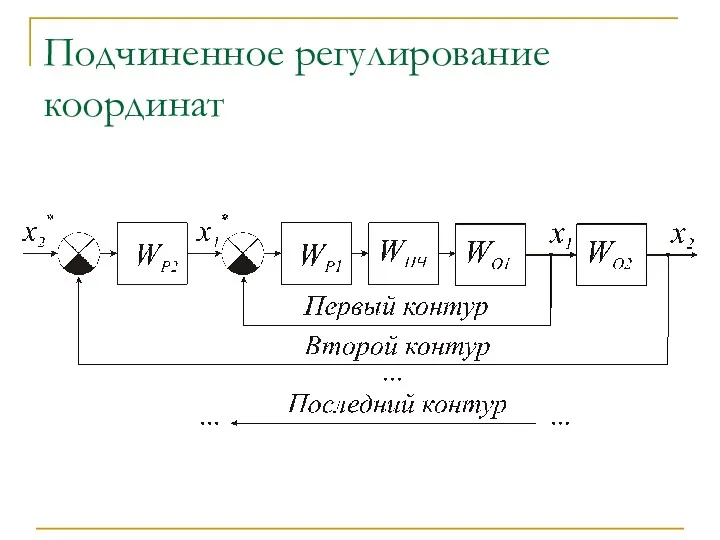
Подчиненное регулирование координат
Подчиненное регулирование координат
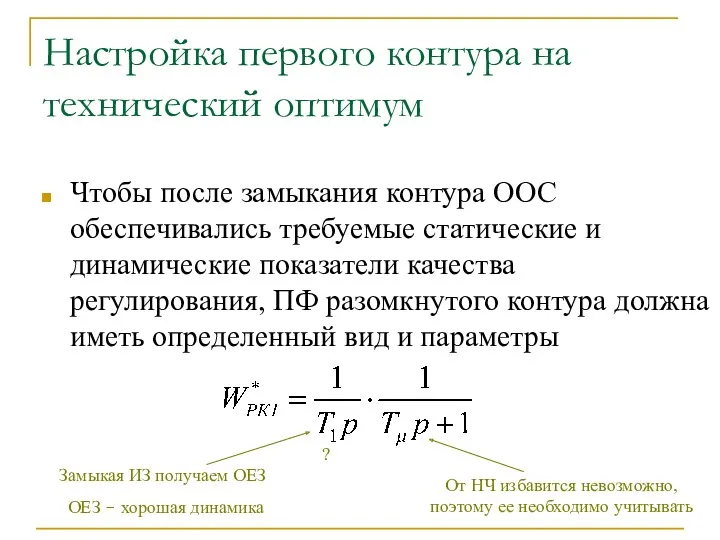
Настройка первого контура на технический оптимум
Чтобы после замыкания контура ООС обеспечивались
Настройка первого контура на технический оптимум
Чтобы после замыкания контура ООС обеспечивались
Настройка первого контура на технический оптимум
С учетом НЧ от постоянной времени
Настройка первого контура на технический оптимум
С учетом НЧ от постоянной времени
Настройка первого контура на технический оптимум
Настройка контура – это определение ПФ
Настройка первого контура на технический оптимум
Настройка контура – это определение ПФ
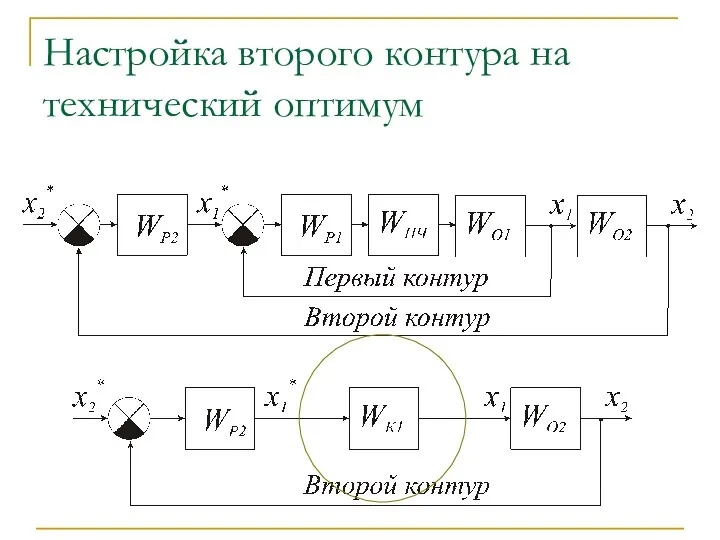
Настройка второго контура на технический оптимум
Настройка второго контура на технический оптимум
Настройка второго контура на технический оптимум
Первый контур настроен по требованиям
Динамику его
Настройка второго контура на технический оптимум
Первый контур настроен по требованиям
Динамику его

Настройка второго контура на технический оптимум
Желаемая ПФ разомкнутого второго контура
Постоянная времени
Настройка второго контура на технический оптимум
Желаемая ПФ разомкнутого второго контура
Постоянная времени
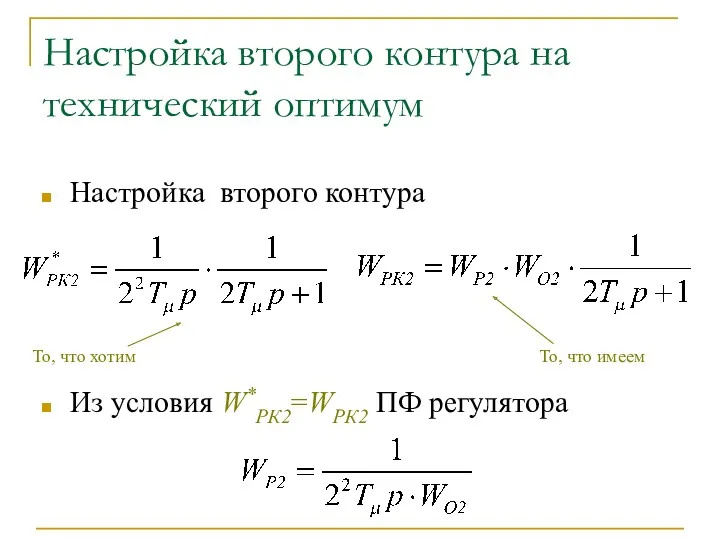
Настройка второго контура на технический оптимум
Настройка второго контура
Из условия W*РК2=WРК2 ПФ
Настройка второго контура на технический оптимум
Настройка второго контура
Из условия W*РК2=WРК2 ПФ

Настройка произвольного контура на технический оптимум
Следующее контуры настраиваются так же
Замыкаем предыдущий
Настройка произвольного контура на технический оптимум
Следующее контуры настраиваются так же
Замыкаем предыдущий
Свойства контура, настроенного на технический оптимум
ωср
lgΩ
L(Ω)
-20 дБ/дек
ωсв
-40 дБ/дек
2
3
Свойства контура, настроенного на технический оптимум
ωср
lgΩ
L(Ω)
-20 дБ/дек
ωсв
-40 дБ/дек
2
3
Свойства контура, настроенного на технический оптимум
Частота ωср находится на участке с
Свойства контура, настроенного на технический оптимум
Частота ωср находится на участке с
Свойства контура, настроенного на технический оптимум
Так как порядок астатизма а=1, при
Свойства контура, настроенного на технический оптимум
Так как порядок астатизма а=1, при
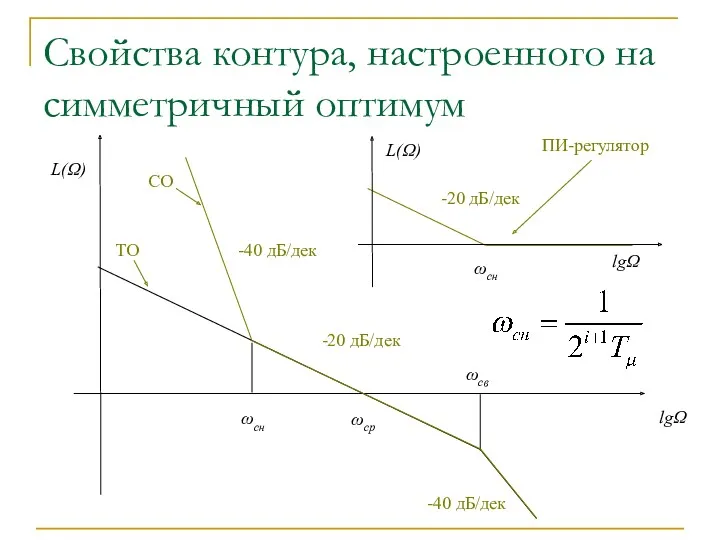
Свойства контура, настроенного на симметричный оптимум
ωср
lgΩ
L(Ω)
-20 дБ/дек
ωсв
-40 дБ/дек
ωсн
-40 дБ/дек
ТО
СО
lgΩ
L(Ω)
-20 дБ/дек
ωсн
ПИ-регулятор
Свойства контура, настроенного на симметричный оптимум
ωср
lgΩ
L(Ω)
-20 дБ/дек
ωсв
-40 дБ/дек
ωсн
-40 дБ/дек
ТО
СО
lgΩ
L(Ω)
-20 дБ/дек
ωсн
ПИ-регулятор
Настройка произвольного контура на симметричный оптимум
Чтобы настроить контур на СО надо
Настройка произвольного контура на симметричный оптимум
Чтобы настроить контур на СО надо
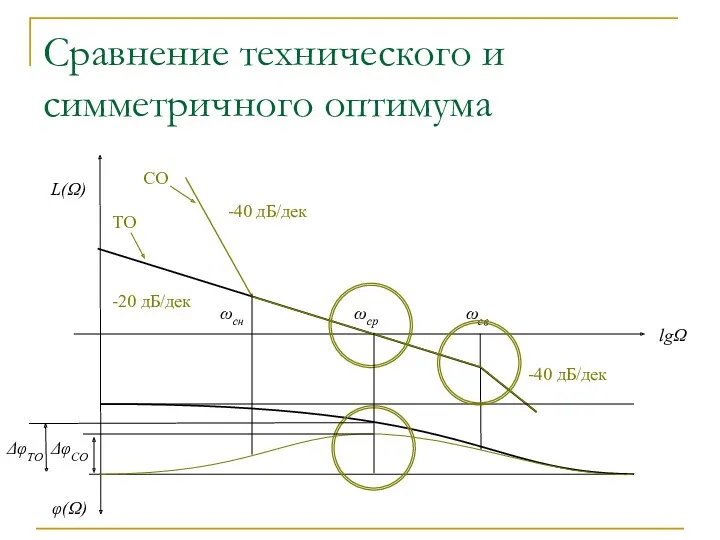
Сравнение технического и симметричного оптимума
ωср
lgΩ
L(Ω)
-20 дБ/дек
ωсв
-40 дБ/дек
ωсн
-40 дБ/дек
ТО
СО
φ(Ω)
ΔφТО
ΔφСО
Сравнение технического и симметричного оптимума
ωср
lgΩ
L(Ω)
-20 дБ/дек
ωсв
-40 дБ/дек
ωсн
-40 дБ/дек
ТО
СО
φ(Ω)
ΔφТО
ΔφСО
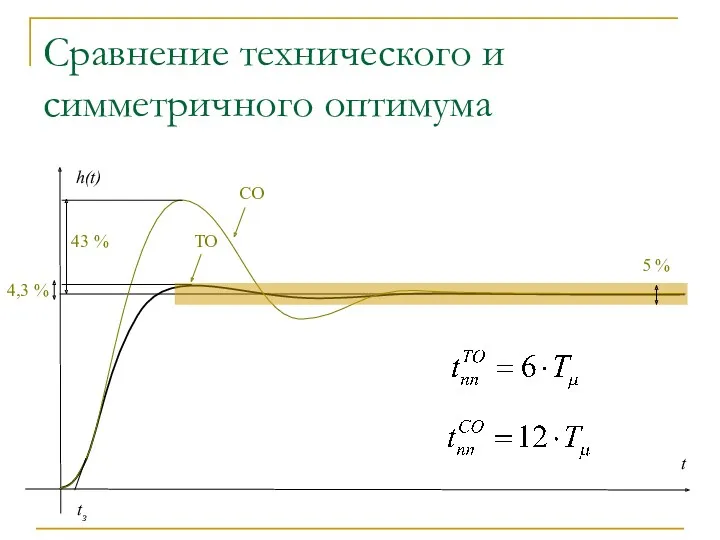
Сравнение технического и симметричного оптимума
t
h(t)
ТО
СО
4,3 %
43 %
tз
5 %
Сравнение технического и симметричного оптимума
t
h(t)
ТО
СО
4,3 %
43 %
tз
5 %
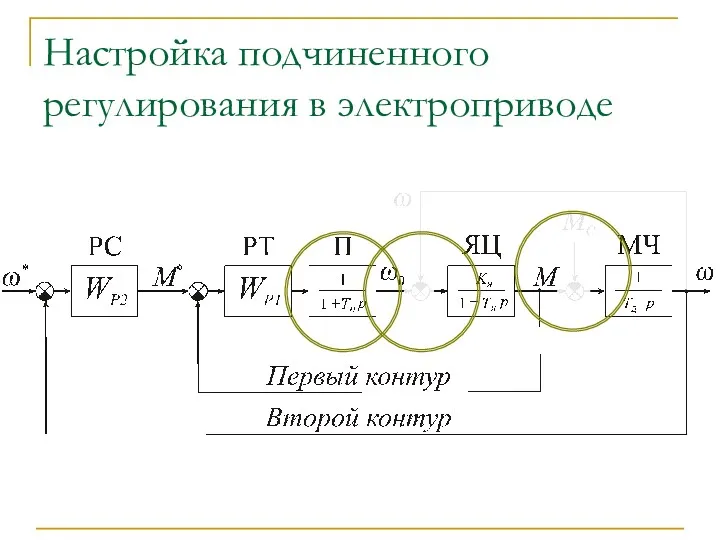
Настройка подчиненного регулирования в электроприводе
Настройка подчиненного регулирования в электроприводе
Настройка подчиненного регулирования в электроприводе
Допущения
Пренебрегаем влиянием обратной связи по ЭДС
Пренебрегаем нагрузкой
Настраиваем
Настройка подчиненного регулирования в электроприводе
Допущения
Пренебрегаем влиянием обратной связи по ЭДС
Пренебрегаем нагрузкой
Настраиваем
Настройка подчиненного регулирования в электроприводе
Влияние обратной связи по ЭДС
Медленно меняющееся возмущение
Незначительно
Настройка подчиненного регулирования в электроприводе
Влияние обратной связи по ЭДС
Медленно меняющееся возмущение
Незначительно
Настройка подчиненного регулирования в электроприводе
Контур скорости настраивают на СО
Регулятор скорости (2
Настройка подчиненного регулирования в электроприводе
Контур скорости настраивают на СО
Регулятор скорости (2
Замкнутые СУЭП
на базе АД
Тема 4
Замкнутые СУЭП
на базе АД
Тема 4
Замкнутые СУЭП на базе асинхронных двигателей
Электрические преобразователи
Тиристорные регуляторы напряжения –
Замкнутые СУЭП на базе асинхронных двигателей
Электрические преобразователи
Тиристорные регуляторы напряжения –
Замкнутые СУЭП на базе асинхронных двигателей
Частотное управление
Частотно-токовое
управление
Замкнутые СУЭП на базе асинхронных двигателей
Частотное управление
Частотно-токовое
управление
Регулирование напряжения статора
Изменение напряжения АД в разомкнутом электроприводе
Диапазон D=1..1,5:1
Перегрузочная способность λМ
Регулирование напряжения статора
Изменение напряжения АД в разомкнутом электроприводе
Диапазон D=1..1,5:1
Перегрузочная способность λМ

Регулирование напряжения статора
?
Регулирование напряжения статора
?
Регулирование напряжения статора
М
ω
Umin
Umax
ω0
Эквивалентная МХ
МС
Неустойчивая
точка равновесия
Регулирование напряжения статора
М
ω
Umin
Umax
ω0
Эквивалентная МХ
МС
Неустойчивая
точка равновесия
Регулирование напряжения статора
М
ω
ω0
Семейство искусственных механических характеристик
ω1*
ω2*>ω1*
Регулирование напряжения статора
М
ω
ω0
Семейство искусственных механических характеристик
ω1*
ω2*>ω1*

Регулирование напряжения статора
Токовая отсечка ТО включает ООС по току только если
Регулирование напряжения статора
Токовая отсечка ТО включает ООС по току только если
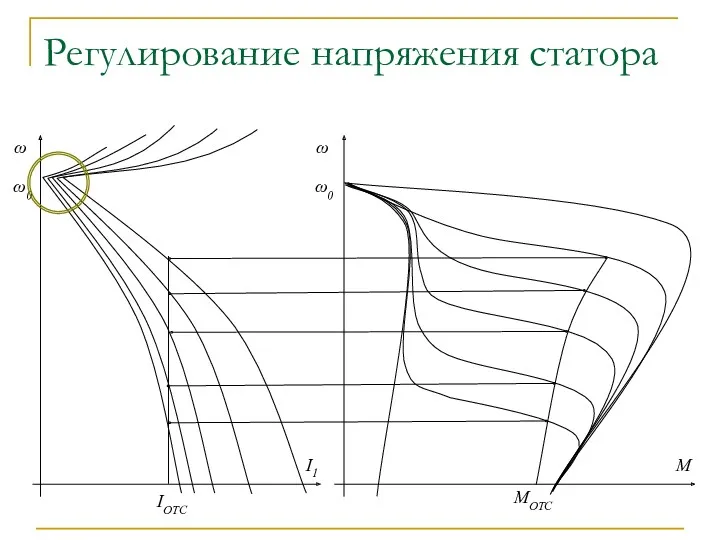
Регулирование напряжения статора
М
ω
ω0
ω
ω0
I1
IОТС
MОТС
Регулирование напряжения статора
М
ω
ω0
ω
ω0
I1
IОТС
MОТС
Регулирование напряжения статора
?
Регулирование напряжения статора
?
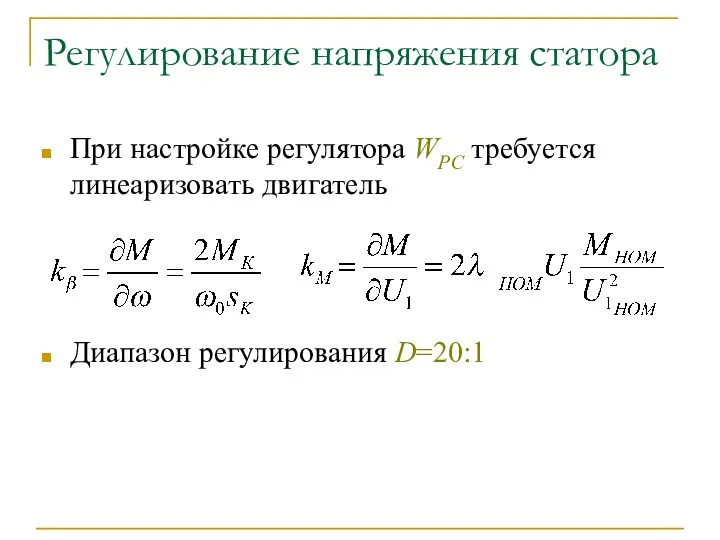
Регулирование напряжения статора
При настройке регулятора WРС требуется линеаризовать двигатель
Диапазон регулирования D=20:1
Регулирование напряжения статора
При настройке регулятора WРС требуется линеаризовать двигатель
Диапазон регулирования D=20:1

Регулирование напряжения ротора
Изменение напряжения ротора в разомкнутом АВК
Диапазон D=2..3:1
Габариты зависят от
Регулирование напряжения ротора
Изменение напряжения ротора в разомкнутом АВК
Диапазон D=2..3:1
Габариты зависят от
Регулирование напряжения ротора
?
Регулирование напряжения ротора
?

Регулирование напряжения ротора
М
ω
ω0
Семейство искусственных механических характеристик
Ed = 0
ω0 э1
ω0 э2
ω0 э3
Естественная
Регулирование напряжения ротора
М
ω
ω0
Семейство искусственных механических характеристик
Ed = 0
ω0 э1
ω0 э2
ω0 э3
Естественная
Регулирование напряжения ротора
М
ω
ω0 э1
ω*
МС1
МС2
ω
ω↓
Δω ↑
ω0 э ↑
ω0 э2
Эквивалентная МХ
Искусственные МХ
Δωдин
Регулирование напряжения ротора
М
ω
ω0 э1
ω*
МС1
МС2
ω
ω↓
Δω ↑
ω0 э ↑
ω0 э2
Эквивалентная МХ
Искусственные МХ
Δωдин

Регулирование напряжения ротора
?
?
Регулирование напряжения ротора
?
?

Регулирование напряжения ротора
При настройке регуляторов WРТ и WРС требуется линеаризовать двигатель
Диапазон
Регулирование напряжения ротора
При настройке регуляторов WРТ и WРС требуется линеаризовать двигатель
Диапазон
 Презентация_Селяева А.Д
Презентация_Селяева А.Д Презентация посвящённая 100-летию Г.В.Свиридова МБДОУ №25
Презентация посвящённая 100-летию Г.В.Свиридова МБДОУ №25 Важные изменения в законодательстве в 2019 году
Важные изменения в законодательстве в 2019 году Семья субъект социокультурной среды
Семья субъект социокультурной среды презентация по работе семейного клуба Счастливый ребёнок МКДОУ детский сад№4 Золотой петушок. с.Пригородное Ивановская область
презентация по работе семейного клуба Счастливый ребёнок МКДОУ детский сад№4 Золотой петушок. с.Пригородное Ивановская область Презентация 8 класс Рациональное использование природных ресурсов
Презентация 8 класс Рациональное использование природных ресурсов командная игра огонь - наш друг, огонь - наш враг
командная игра огонь - наш друг, огонь - наш враг Представление чисел в формате с плавающей запятой
Представление чисел в формате с плавающей запятой Газопламенное напыление
Газопламенное напыление Шагает эра космоса вперёд.
Шагает эра космоса вперёд. Алтайский заповедник
Алтайский заповедник Профотбор. Проблема отбора
Профотбор. Проблема отбора РобоПлатформа. Старт 2.0 Урок 10
РобоПлатформа. Старт 2.0 Урок 10 Отработка предлагаемых продаж и навыки презентации меню/
Отработка предлагаемых продаж и навыки презентации меню/ ВОИН о ВОЙНЕ работа посвящается Героям Отечества
ВОИН о ВОЙНЕ работа посвящается Героям Отечества 97 А класс әмбебап тігін машинасы
97 А класс әмбебап тігін машинасы Презентация Механические волны.
Презентация Механические волны. Презентация к уроку истории и культуры Санкт-Петербурга в 8 классе Памятники воинской славы в Санкт-Петербурге: Отечественная война 1812 года
Презентация к уроку истории и культуры Санкт-Петербурга в 8 классе Памятники воинской славы в Санкт-Петербурге: Отечественная война 1812 года Будова і технічне обслуговування транспортного засобу категорії В. Трансмісія, підвіска та механізми керування
Будова і технічне обслуговування транспортного засобу категорії В. Трансмісія, підвіска та механізми керування Рисуем пасхальные яйца
Рисуем пасхальные яйца Ленинградская область на карте нашей страны
Ленинградская область на карте нашей страны Петровские преобразования: предпосылки, основные направления, результаты
Петровские преобразования: предпосылки, основные направления, результаты Заболачивание
Заболачивание Моя презентация
Моя презентация Метод щелевой разгрузки пласта в призабойной зоне скважин
Метод щелевой разгрузки пласта в призабойной зоне скважин Система входных приемных устройств 35ВВ РЛС 35Н6
Система входных приемных устройств 35ВВ РЛС 35Н6 Против неограниченной свободы
Против неограниченной свободы Bukhara
Bukhara