- ТРИЗ Законы статики: закон единства противоположностей

Содержание
- 2. * Г.С. Альтшуллер Россия ТРИЗ – ТЕОРИЯ РЕШЕНИЯ ИЗОБРЕТАТЕЛЬСКИХ ЗАДАЧ Законы развития систем - ЗРС. Общие
- 3. * Г.С. Альтшуллер Россия Темы для обсуждения В центре нашего внимания будут: Закономерности развития систем (ЗРС);
- 4. * Г.С. Альтшуллер Россия
- 5. * Г.С. Альтшуллер Россия
- 6. * Г.С. Альтшуллер Россия
- 7. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ ОБЕСПЕЧИВАЮЩИЕ ПРИНЦИПИАЛЬНУЮ ЖИЗНЕСПОСОБНОСТЬ СИСТЕМЫ Чтобы быть работоспособной система должна
- 8. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы Необходимым условием принципиальной
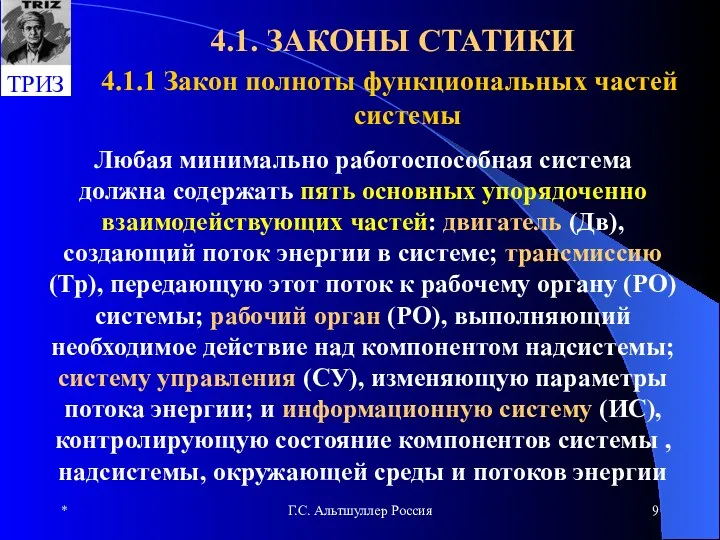
- 9. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы Любая минимально работоспособная
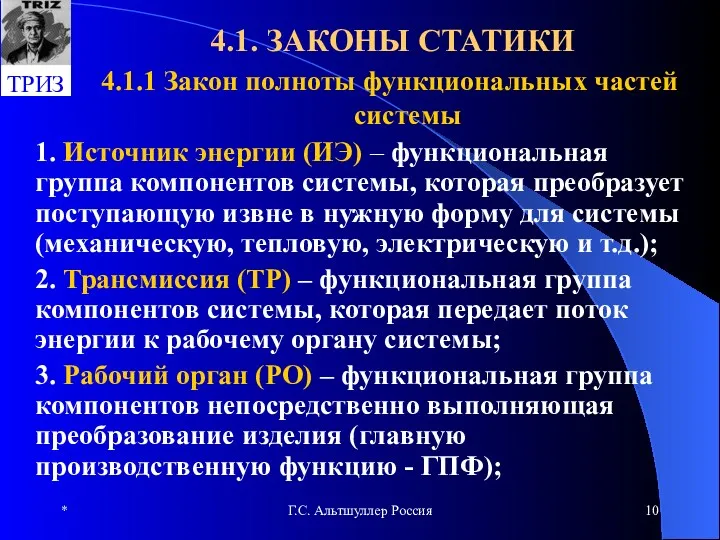
- 10. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы 1. Источник энергии
- 11. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы 4. Система управления
- 12. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы Примечание: 1. Источник
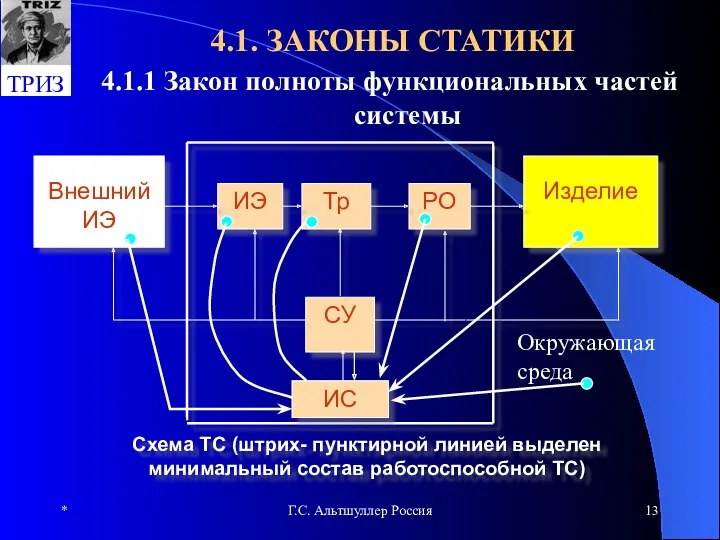
- 13. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы
- 14. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ Следствие 1. Чтобы система была минимально работоспособной необходимо, чтобы
- 15. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ Следствие 2. Чтобы система была минимально работоспособной, необходимо обеспечить
- 16. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ Следствие 3. Система имеет три вертикальных уровня организации: исполнительский
- 17. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ Следствие 4. Чтобы система была управляемой, необходимо, чтобы хотя
- 18. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ Примечание В реальных системах одна и та же совокупность
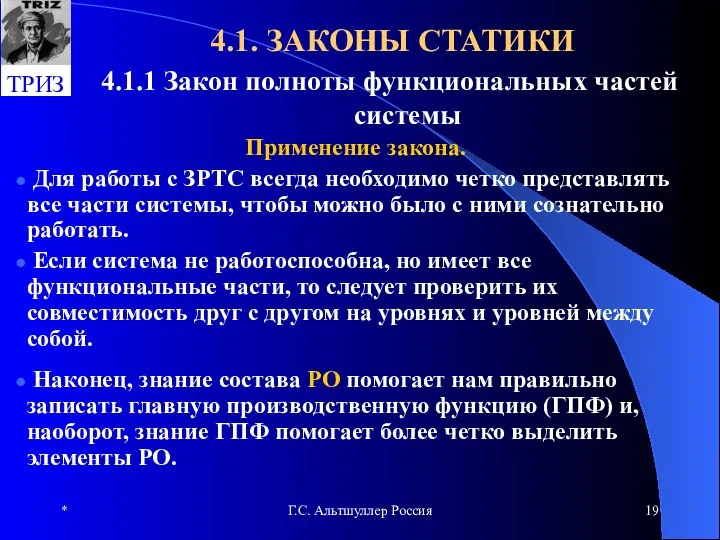
- 19. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы Применение закона. Для
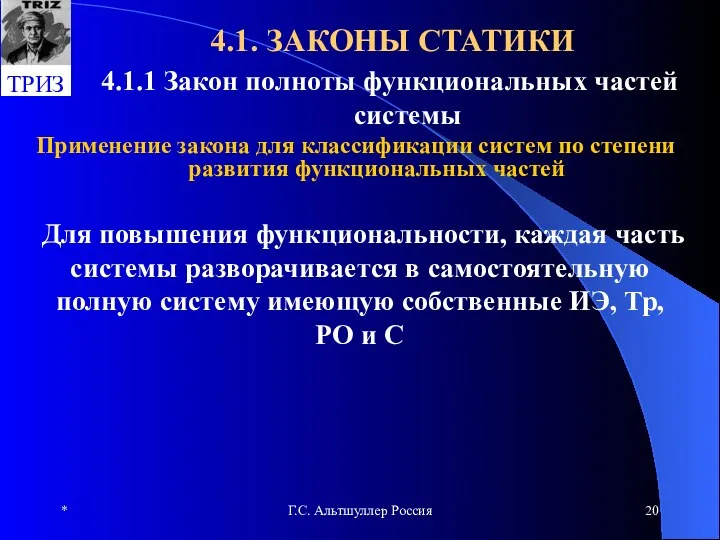
- 20. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы Применение закона для
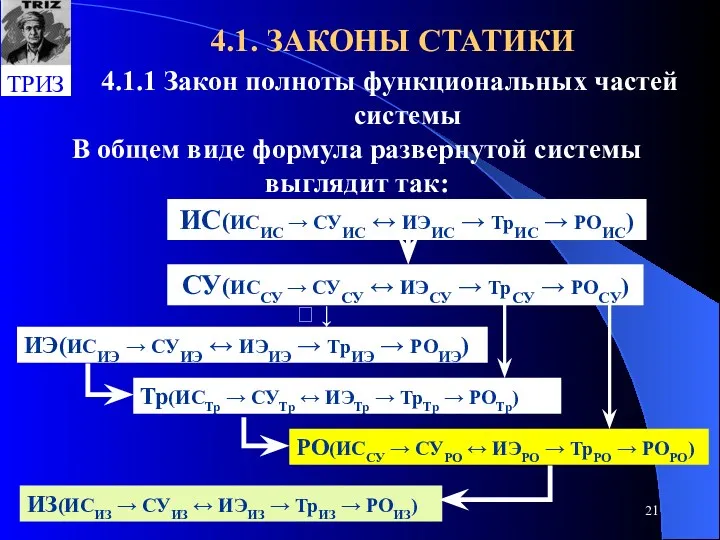
- 21. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы В общем виде
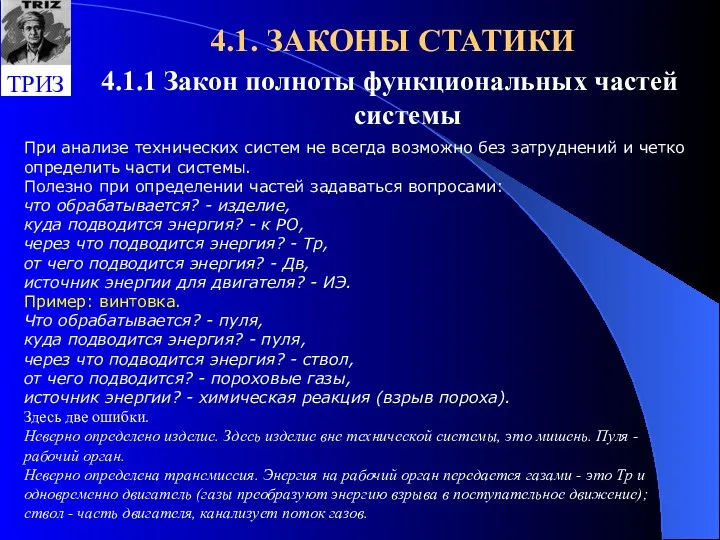
- 22. 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы При анализе технических систем не всегда возможно
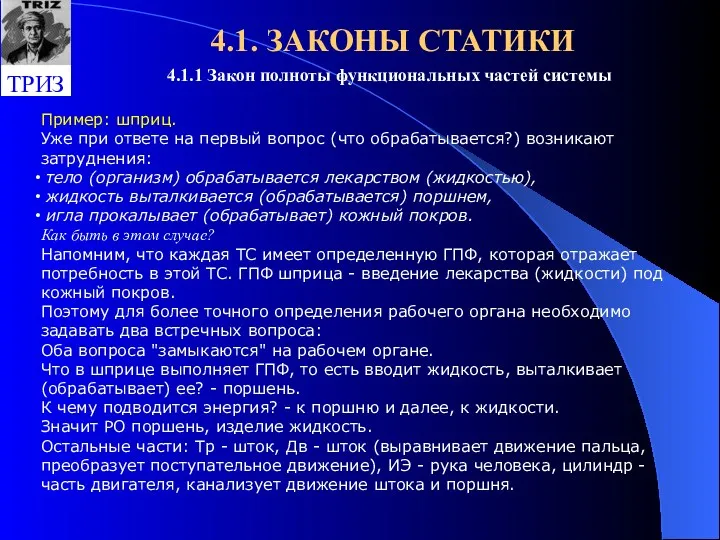
- 23. 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы Пример: шприц. Уже при ответе на первый
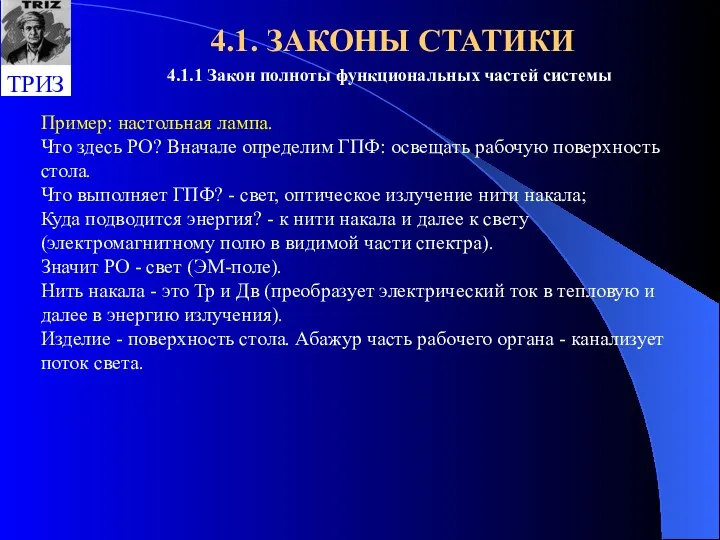
- 24. 4.1. ЗАКОНЫ СТАТИКИ 4.1.1 Закон полноты функциональных частей системы Пример: настольная лампа. Что здесь РО? Вначале
- 25. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости Необходимым условием принципиальной жизнеспособности системы
- 26. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости Таким образом: Для обеспечения функционирования
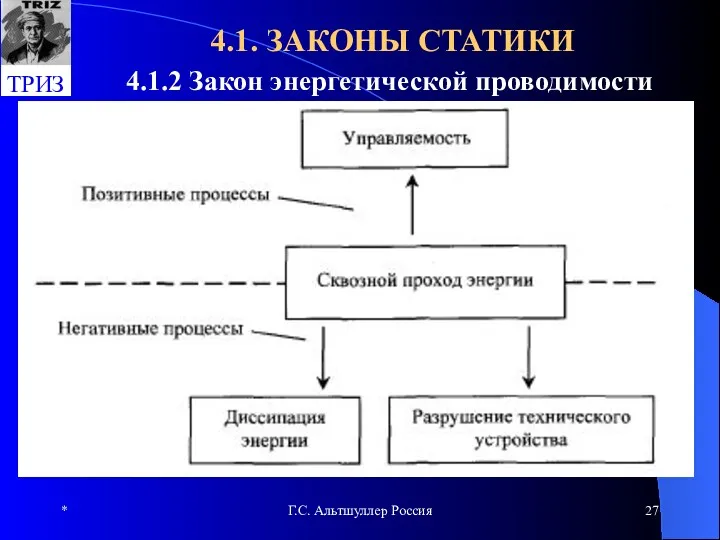
- 27. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости
- 28. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости Развитие систем идет в направлении
- 29. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости - увеличивается использование внутренних нейтральных
- 30. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости Передача энергии от одной части
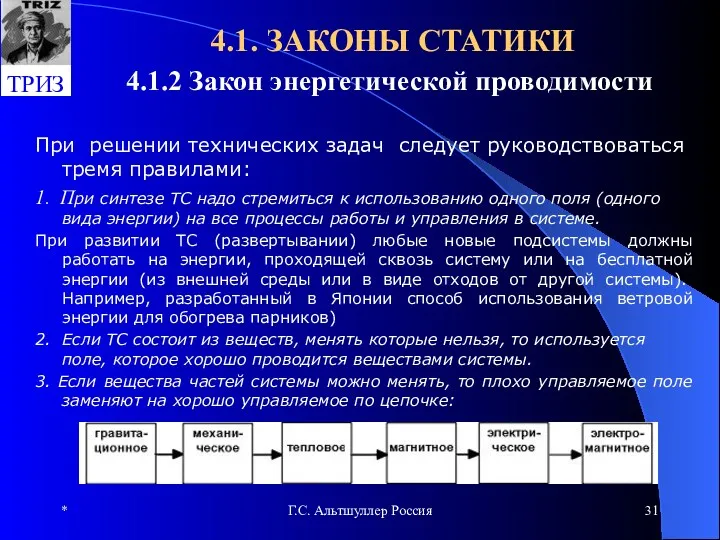
- 31. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости При решении технических задач следует
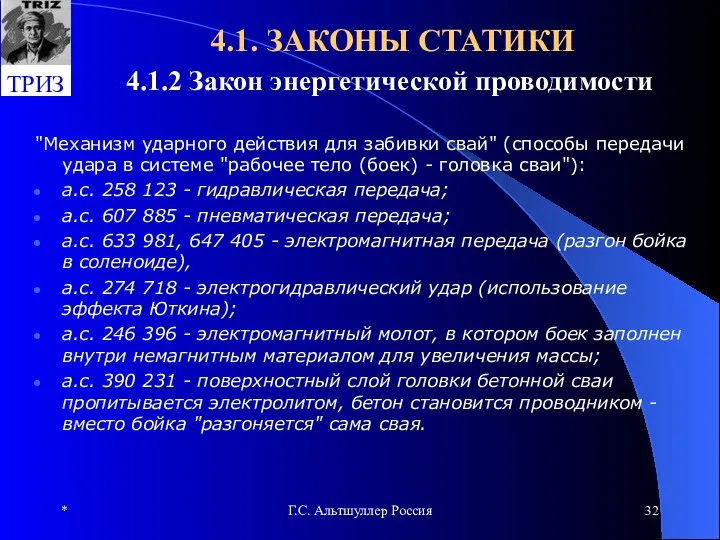
- 32. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости "Механизм ударного действия для забивки
- 33. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости Последовательность вопросов на применение закона
- 34. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.2 Закон энергетической проводимости Примеры Задача 1. При массовом
- 35. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.3 Закон согласования ритмики частей системы Необходимым условием принципиальной
- 36. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.3 Закон согласования ритмики частей системы Из закона согласования
- 37. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.3 Закон согласования ритмики частей системы Примеры 1 -
- 38. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.3 Закон согласования ритмики частей системы Пример Разрушение угольных
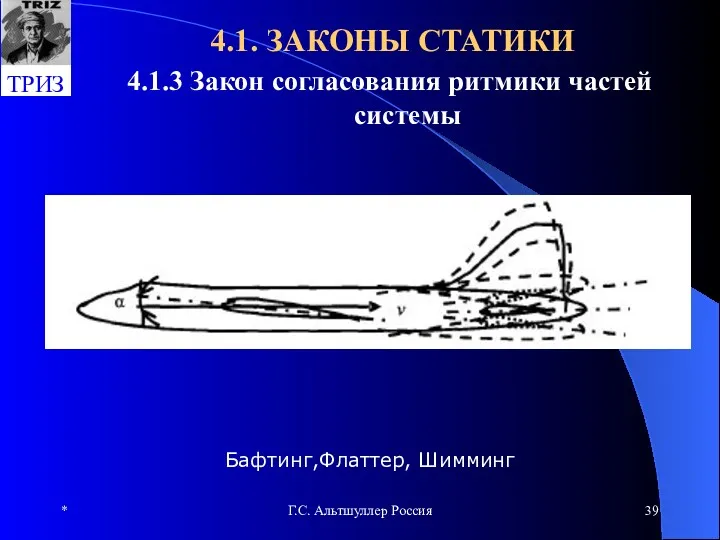
- 39. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.3 Закон согласования ритмики частей системы Бафтинг,Флаттер, Шимминг
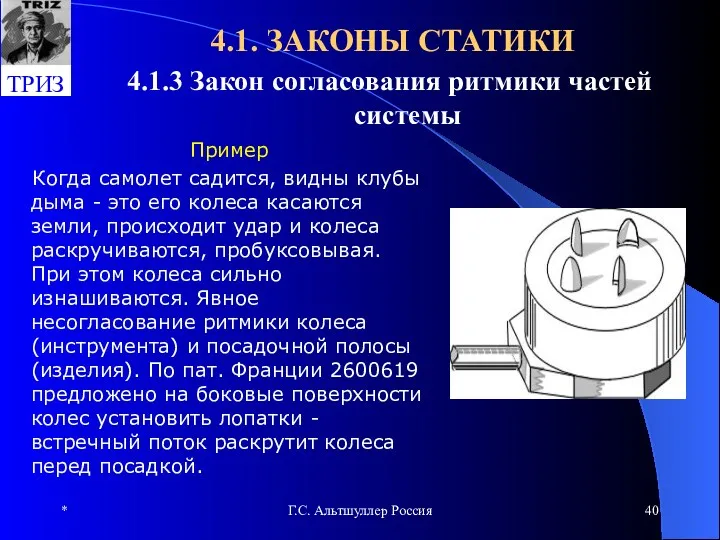
- 40. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.3 Закон согласования ритмики частей системы Пример Когда самолет
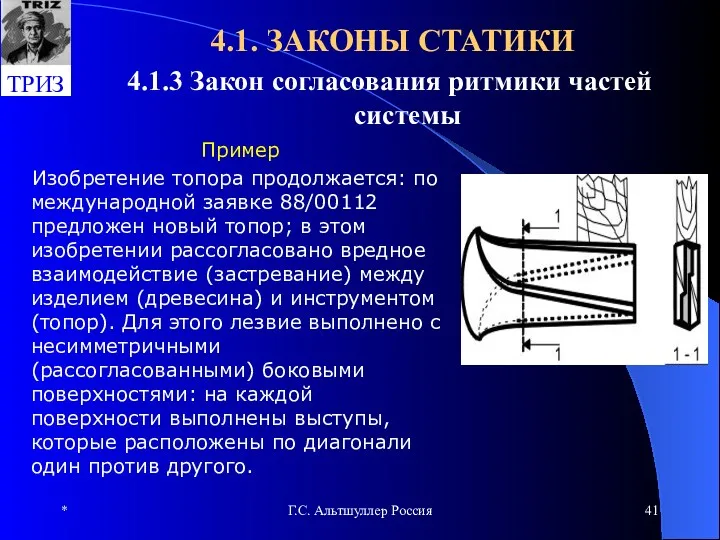
- 41. * Г.С. Альтшуллер Россия 4.1. ЗАКОНЫ СТАТИКИ 4.1.3 Закон согласования ритмики частей системы Пример Изобретение топора
- 43. Скачать презентацию
*
Г.С. Альтшуллер Россия
ТРИЗ – ТЕОРИЯ РЕШЕНИЯ ИЗОБРЕТАТЕЛЬСКИХ ЗАДАЧ
Законы развития систем -
*
Г.С. Альтшуллер Россия
ТРИЗ – ТЕОРИЯ РЕШЕНИЯ ИЗОБРЕТАТЕЛЬСКИХ ЗАДАЧ
Законы развития систем -
*
Г.С. Альтшуллер Россия
Темы для обсуждения
В центре нашего внимания будут:
Закономерности развития систем
*
Г.С. Альтшуллер Россия
Темы для обсуждения
В центре нашего внимания будут:
Закономерности развития систем

*
Г.С. Альтшуллер Россия
*
Г.С. Альтшуллер Россия
*
Г.С. Альтшуллер Россия
*
Г.С. Альтшуллер Россия
*
Г.С. Альтшуллер Россия
*
Г.С. Альтшуллер Россия
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
ОБЕСПЕЧИВАЮЩИЕ ПРИНЦИПИАЛЬНУЮ ЖИЗНЕСПОСОБНОСТЬ СИСТЕМЫ
Чтобы быть работоспособной
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
ОБЕСПЕЧИВАЮЩИЕ ПРИНЦИПИАЛЬНУЮ ЖИЗНЕСПОСОБНОСТЬ СИСТЕМЫ
Чтобы быть работоспособной
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Необходимым условием
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Необходимым условием
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Любая минимально
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Любая минимально
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
1. Источник
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
1. Источник
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
4. Система
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
4. Система
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Примечание: 1.
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Примечание: 1.
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 1.
Чтобы система была минимально работоспособной
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 1.
Чтобы система была минимально работоспособной
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 2.
Чтобы система была минимально работоспособной,
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 2.
Чтобы система была минимально работоспособной,
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 3.
Система имеет три вертикальных уровня
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 3.
Система имеет три вертикальных уровня
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 4.
Чтобы система была управляемой, необходимо,
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Следствие 4.
Чтобы система была управляемой, необходимо,
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Примечание
В реальных системах одна и та
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
Примечание
В реальных системах одна и та
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Применение закона.
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Применение закона.
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Применение закона
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Применение закона
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
В общем
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
В общем
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
При анализе технических систем
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
При анализе технических систем
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Пример: шприц.
Уже при ответе
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Пример: шприц.
Уже при ответе
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Пример: настольная лампа.
Что здесь
4.1. ЗАКОНЫ СТАТИКИ
4.1.1 Закон полноты функциональных частей системы
Пример: настольная лампа.
Что здесь
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Необходимым условием принципиальной жизнеспособности
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Необходимым условием принципиальной жизнеспособности
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Таким образом:
Для обеспечения функционирования
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Таким образом:
Для обеспечения функционирования
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Развитие систем идет в
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Развитие систем идет в
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
- увеличивается использование внутренних
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
- увеличивается использование внутренних
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Передача энергии от одной
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Передача энергии от одной
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
При решении технических задач
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
При решении технических задач
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
"Механизм ударного действия для
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
"Механизм ударного действия для

*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Последовательность вопросов на применение
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Последовательность вопросов на применение
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Примеры
Задача 1. При массовом
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.2 Закон энергетической проводимости
Примеры
Задача 1. При массовом
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Необходимым условием
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Необходимым условием
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Из закона
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Из закона

*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Примеры
1 -
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Примеры
1 -
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Пример Разрушение
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Пример Разрушение
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Бафтинг,Флаттер, Шимминг
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Бафтинг,Флаттер, Шимминг
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Пример
Когда самолет
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Пример
Когда самолет
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Пример
Изобретение топора
*
Г.С. Альтшуллер Россия
4.1. ЗАКОНЫ СТАТИКИ
4.1.3 Закон согласования ритмики частей системы
Пример
Изобретение топора
 Эволюционная эпистемология
Эволюционная эпистемология Средневековая философия
Средневековая философия Сущность и структура морали
Сущность и структура морали Көне Қытай философиясы
Көне Қытай философиясы Истина и ее критерии
Истина и ее критерии Проблема идеального в философии
Проблема идеального в философии Риторика для юристов
Риторика для юристов Общая характеристика, предмет и метод средневековой философии. Философия как служанка богословия
Общая характеристика, предмет и метод средневековой философии. Философия как служанка богословия Проблема человека в философии
Проблема человека в философии Мәдениет,махаббат және дін философиясы
Мәдениет,махаббат және дін философиясы Деятельность. Структура и виды деятельности
Деятельность. Структура и виды деятельности Судження (Логіка висловлювань)
Судження (Логіка висловлювань) Философия Древней Индии
Философия Древней Индии Духовная жизнь человека
Духовная жизнь человека Философия науки и техники. Методологические проблемы научного познания
Философия науки и техники. Методологические проблемы научного познания Бұқаралық мәдениет оның бастаулары
Бұқаралық мәдениет оның бастаулары Виды знаний. Познание
Виды знаний. Познание Монадология Лейбница
Монадология Лейбница Марксистік саяси идеялар
Марксистік саяси идеялар Тело, мышление, язык: философские решения. Лекция 1
Тело, мышление, язык: философские решения. Лекция 1 Философия. Высокая классика
Философия. Высокая классика Наука и искусство. (8 класс)
Наука и искусство. (8 класс) Исторические типы философии. Философские традиции и современные дискуссии
Исторические типы философии. Философские традиции и современные дискуссии Религия
Религия Наука и ее роль в современном обществе
Наука и ее роль в современном обществе Философия эпохи возрождения. Основные направления философии эпохи Возрождения (XIV - XVI вв.)
Философия эпохи возрождения. Основные направления философии эпохи Возрождения (XIV - XVI вв.) Античная философия
Античная философия Учения Канта и Гегеля
Учения Канта и Гегеля