- Абсолютно твёрдое тело

Содержание
- 2. Лекция № 6 1. Модель абсолютно твёрдого тела. 2. Кинематика движения свободного тела. Вектор угловой скорости.
- 3. Абсолютно твёрдое тело - это система материальных точек, где все расстояния между ними сохраняются постоянными независимо
- 4. Для описания движения тела удобно использовать две прямоугольные декартовы системы координат. Неподвижная система координат K, с
- 5. - радиус-вектор точки в движущейся системе координат K', имеющей орты. Скорость произвольной точки тела с помощью
- 6. Произвольное движение свободного тела есть сумма поступательного движения со скоростью движения центра масс тела и вращения
- 7. При движении тела мгновенная ось вращения может менять свою ориентацию, а вместе с ней меняет свою
- 8. Рассмотрим систему частиц состоящую из n точек (m1 m2 … mn); – радиус-вектор i-ой точки, проведенный
- 9. Запишем основное уравнение динамики для точки: Умножим обе части векторно на Знак производной можно вынести за
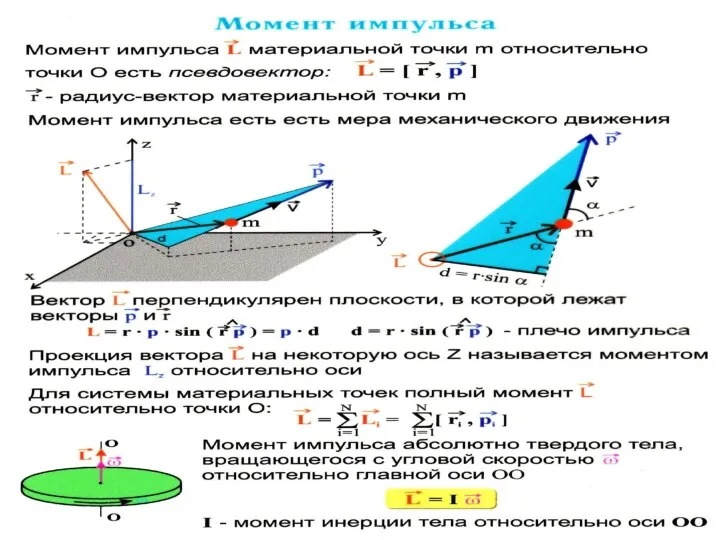
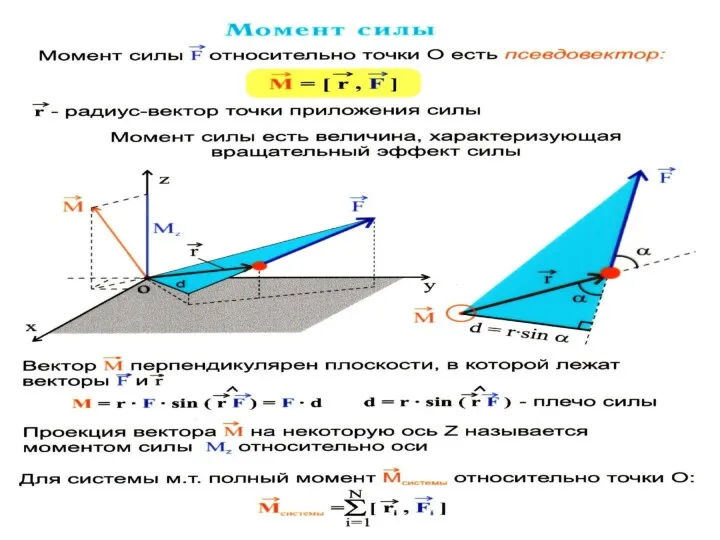
- 10. Векторное произведение точки на её импульс называется моментом импульса этой точки относительно точки О: Эти три
- 11. Или Здесь L − трехмерный момент импульса относительно центра вращения О. Модуль
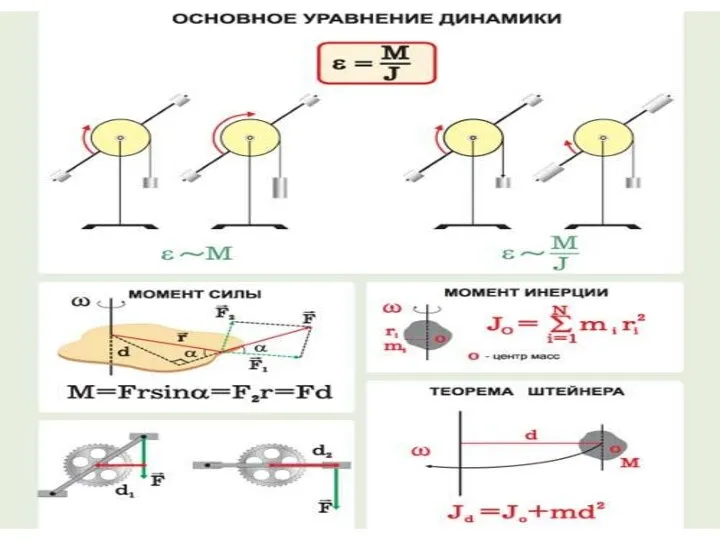
- 14. Векторное произведение проведенного в точку приложения сил, на эту силу называется моментом силы Обозначим li –
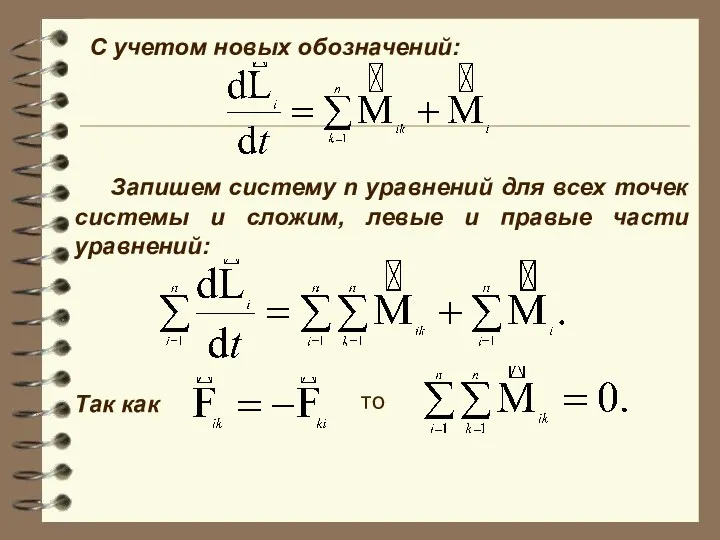
- 17. C учетом новых обозначений: Запишем систему n уравнений для всех точек системы и сложим, левые и
- 18. Здесь сумма производных равна производной суммы: где – момент импульса системы, – результирующий момент всех внешних
- 19. Для системы материальных точек уравнение моментов (относительно точки) имеет вид: где -момент всех внешних сил действующих
- 20. Закон сохранения момента импульса – момент импульса замкнутой системы тел относительно любой неподвижной точки не изменяется
- 21. Аналогично для замкнутой системы частиц вращающихся вокруг оси Z : отсюда Если момент внешних сил относительно
- 23. Используется гироскоп в различных навигационных устройствах кораблей, самолетов, ракет ( гирокомпас, гирогоризонт ). Уравновешенный гироскоп –
- 24. УСТРОЙСТВО ГИРОСКОПА
- 25. ГИРОКОМПАС Гироскопическим компасом (гирокомпасом) называется гироскоп, ось которого может свободно поворачиваться в горизонтальной плоскости под влиянием
- 26. В классической механике полный момент импульса тела относительно неподвижной точки можно всегда рассматривать как сумму двух
- 27. и = 6,62·10-34Дж·с - постоянная Планка, S -целое(в т.ч. нулевое) положительное число для бозонов или полуцелое
- 28. Динамика вращательного движения твердого тела относительно оси
- 29. Пусть некоторое тело вращается вокруг оси z . Получим уравнение динамики для некоторой точки mi этого
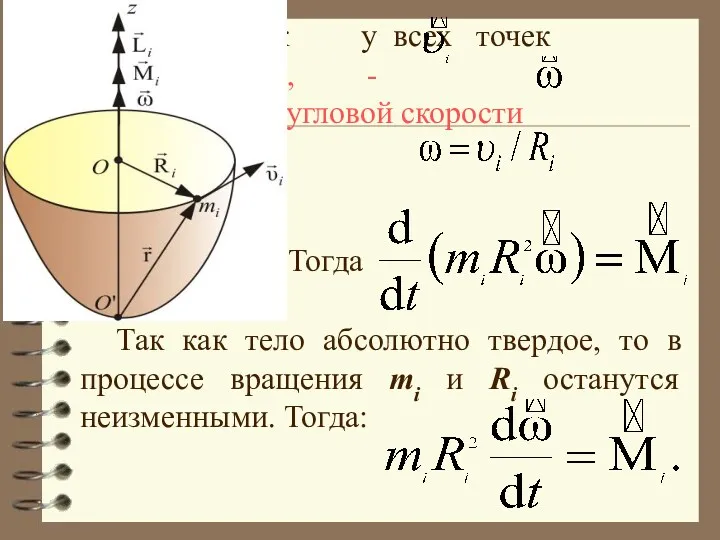
- 30. Так как у всех точек разная, введем, - вектор угловой скорости причем Тогда Так как тело
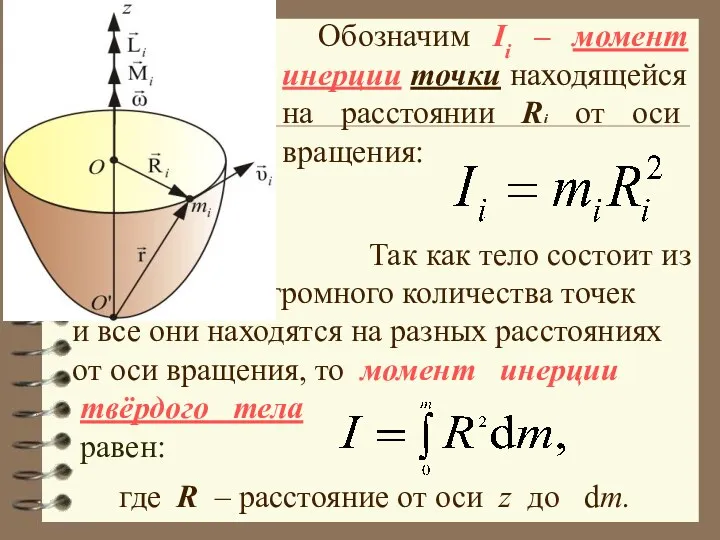
- 31. Обозначим Ii – момент инерции точки находящейся на расстоянии Ri от оси вращения: Так как тело
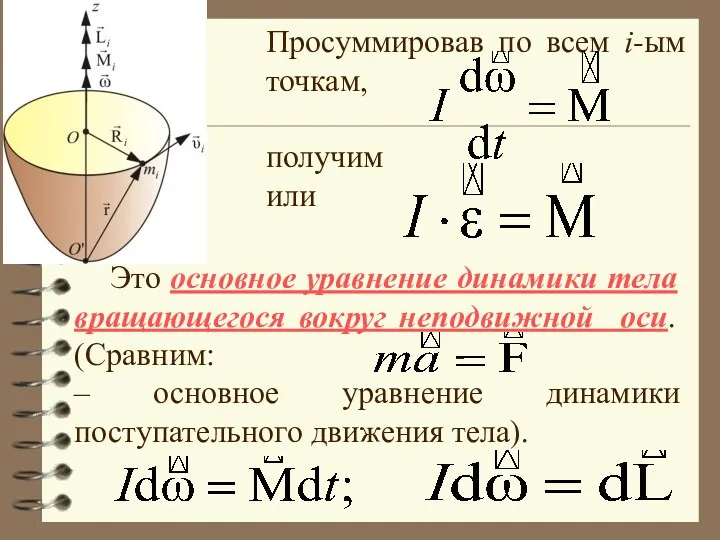
- 32. Просуммировав по всем i-ым точкам, получим или Это основное уравнение динамики тела вращающегося вокруг неподвижной оси.
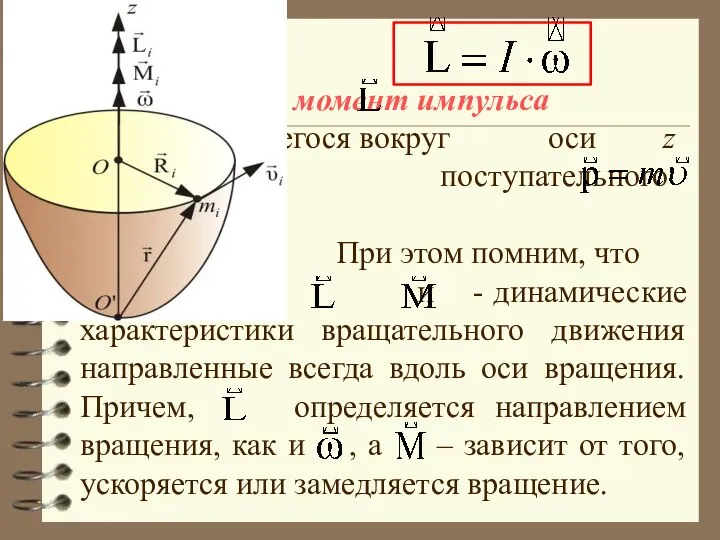
- 33. где – момент импульса тела вращающегося вокруг оси z (Сравним: для поступательного движения). При этом помним,
- 34. Повторим основные характеристики вращательного движения Момент импульса Эти формулы получены для одной точки вращающегося твердого тела
- 35. Расчет моментов инерции некоторых простых тел.
- 36. Интегрирование проводится по всему объёму тела V. В качестве примера вычислим момент инерции тонкого однородного стержня
- 37. Момент инерции этой частицы стержня равен: . Вычислив подобным образом, момен-ты инерции всех элементов стержня, сложим
- 38. Моменты инерции шара, сферы, диска, обруча и стержня. Шар Сфера Диск Обруч Стержень
- 39. Моменты инерции некоторых тел
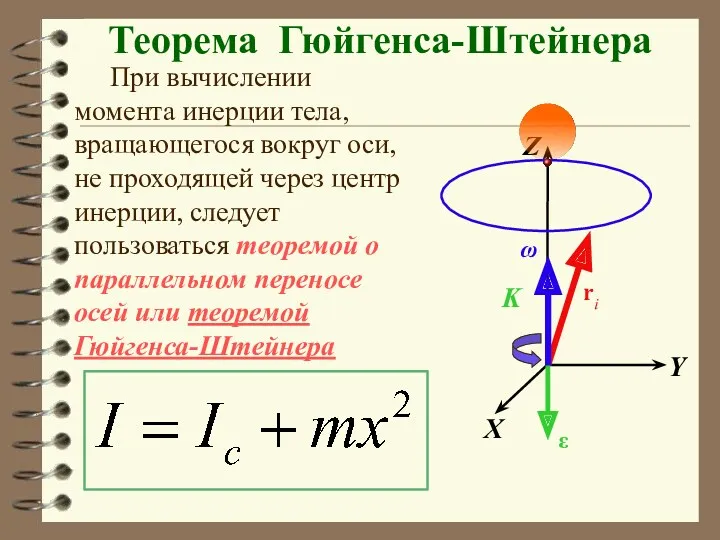
- 40. X Y Z K ri ω ε При вычислении момента инерции тела, вращающегося вокруг оси, не
- 41. где x — расстояние между осями. Теорема Гюйгенса-Штейнера: Момент инерции тела относительно произвольной оси I равен
- 42. Пример: стержень массой m, длиной l, вращается вокруг оси, проходящей через конец стержня .
- 45. Скачать презентацию
Лекция № 6
1. Модель абсолютно твёрдого тела.
2. Кинематика движения свободного
Лекция № 6
1. Модель абсолютно твёрдого тела.
2. Кинематика движения свободного
Абсолютно твёрдое тело - это система материальных точек, где все расстояния
Абсолютно твёрдое тело - это система материальных точек, где все расстояния
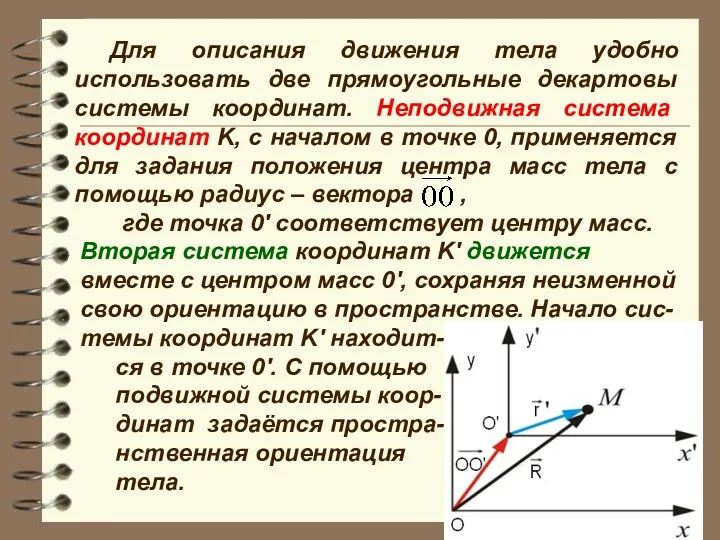
Для описания движения тела удобно использовать две прямоугольные декартовы системы координат.
Для описания движения тела удобно использовать две прямоугольные декартовы системы координат.
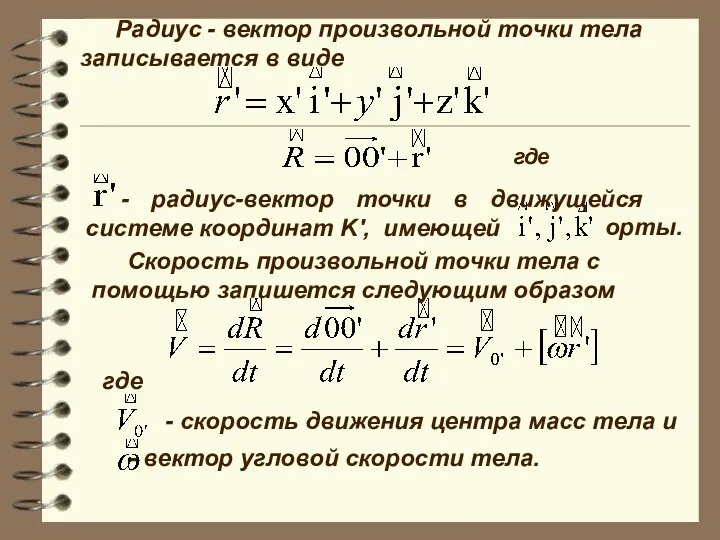
- радиус-вектор точки в движущейся системе координат K', имеющей
орты.
Скорость
- радиус-вектор точки в движущейся системе координат K', имеющей
орты.
Скорость
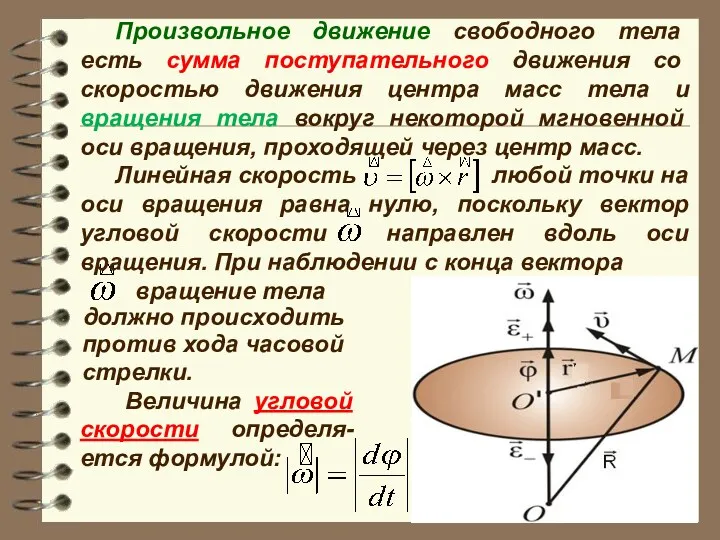
Произвольное движение свободного тела есть сумма поступательного движения со скоростью движения
Произвольное движение свободного тела есть сумма поступательного движения со скоростью движения
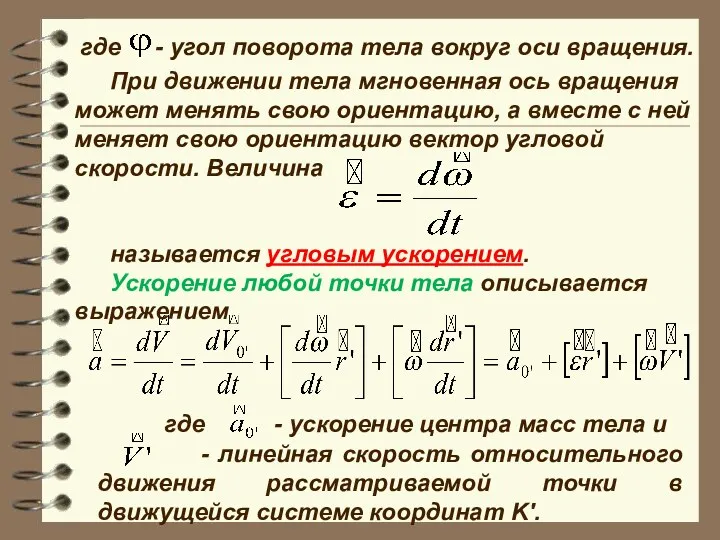
При движении тела мгновенная ось вращения может менять свою ориентацию, а
При движении тела мгновенная ось вращения может менять свою ориентацию, а
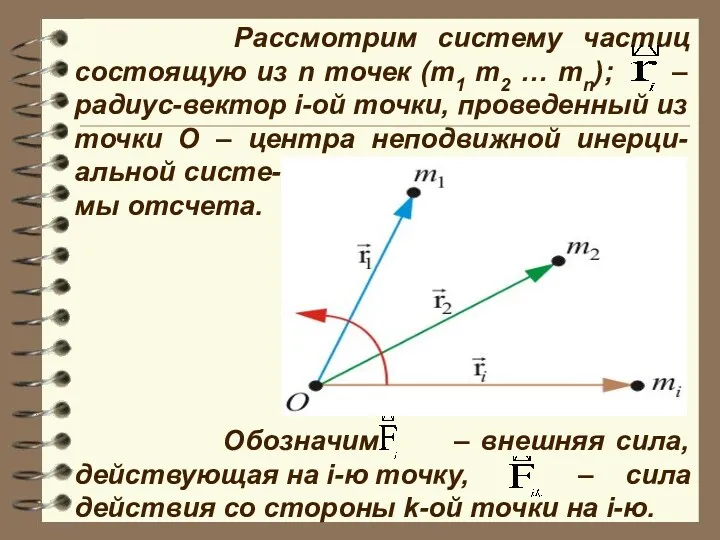
Рассмотрим систему частиц состоящую из n точек (m1 m2 …
Рассмотрим систему частиц состоящую из n точек (m1 m2 …
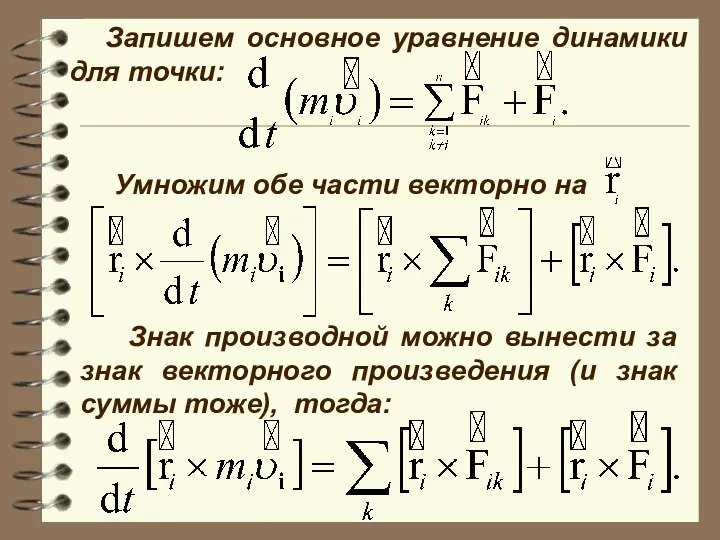
Запишем основное уравнение динамики для точки:
Умножим обе части векторно на
Запишем основное уравнение динамики для точки:
Умножим обе части векторно на
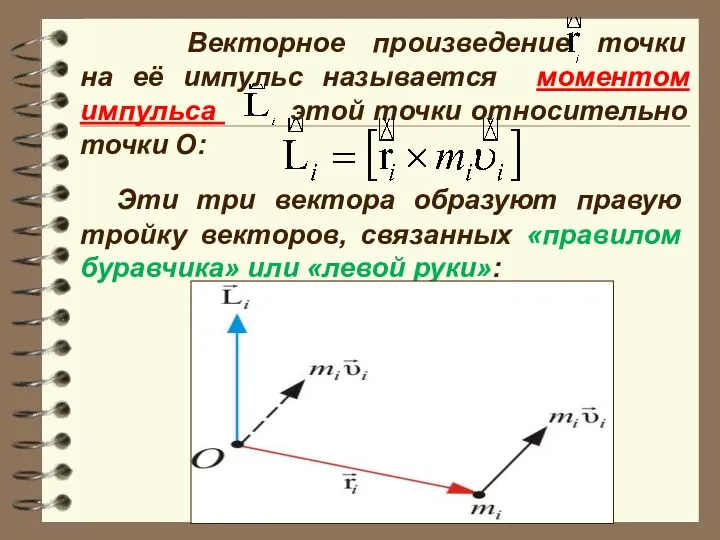
Векторное произведение точки на её импульс называется моментом импульса этой
Векторное произведение точки на её импульс называется моментом импульса этой
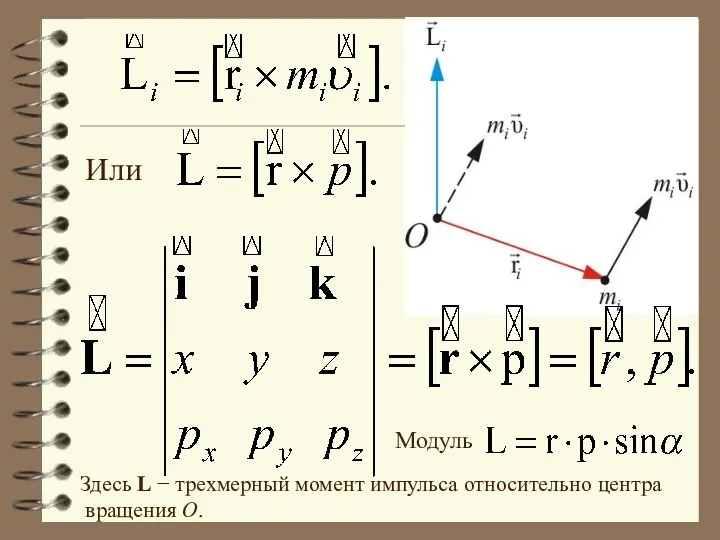
Или
Здесь L − трехмерный момент импульса относительно центра
вращения О.
Модуль
Или
Здесь L − трехмерный момент импульса относительно центра
вращения О.
Модуль
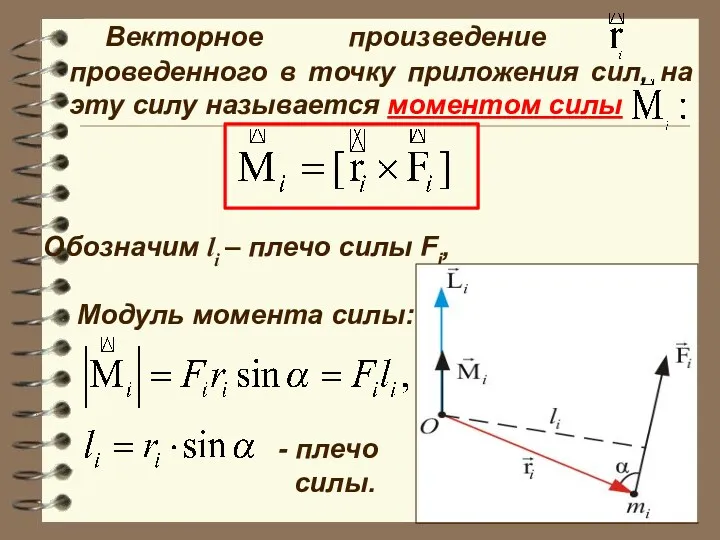
Векторное произведение
проведенного в точку приложения сил, на эту силу называется
Векторное произведение
проведенного в точку приложения сил, на эту силу называется
C учетом новых обозначений:
Запишем систему n уравнений для всех точек
C учетом новых обозначений:
Запишем систему n уравнений для всех точек
Здесь сумма производных равна производной суммы:
где – момент импульса системы,
Здесь сумма производных равна производной суммы:
где – момент импульса системы,
Для системы материальных точек уравнение моментов (относительно точки) имеет вид:
где
Для системы материальных точек уравнение моментов (относительно точки) имеет вид:
где
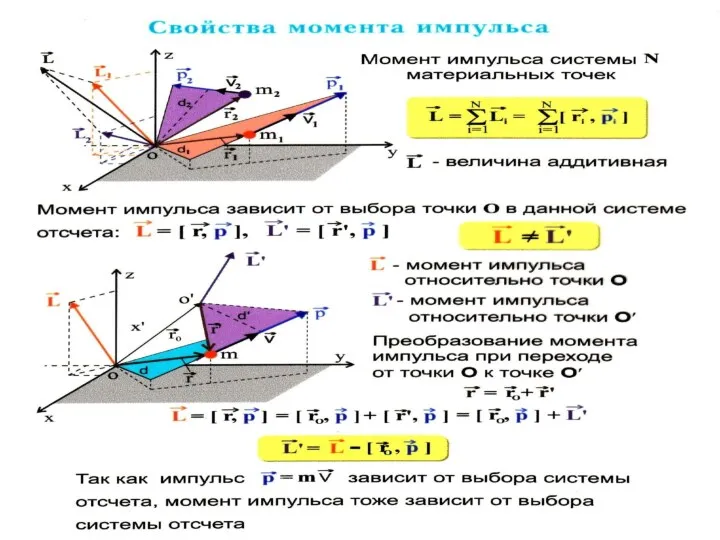
Закон сохранения момента импульса – момент импульса замкнутой системы тел относительно
Закон сохранения момента импульса – момент импульса замкнутой системы тел относительно
Аналогично для замкнутой системы частиц вращающихся вокруг оси Z :
отсюда
Аналогично для замкнутой системы частиц вращающихся вокруг оси Z :
отсюда


Используется гироскоп в различных навигационных устройствах кораблей, самолетов, ракет ( гирокомпас,
Используется гироскоп в различных навигационных устройствах кораблей, самолетов, ракет ( гирокомпас,

УСТРОЙСТВО ГИРОСКОПА
УСТРОЙСТВО ГИРОСКОПА

ГИРОКОМПАС
Гироскопическим компасом (гирокомпасом)
называется гироскоп, ось которого может
свободно поворачиваться в горизонтальной
плоскости под
ГИРОКОМПАС
Гироскопическим компасом (гирокомпасом)
называется гироскоп, ось которого может
свободно поворачиваться в горизонтальной
плоскости под
В классической механике полный момент импульса тела относительно неподвижной точки можно
В классической механике полный момент импульса тела относительно неподвижной точки можно
и
= 6,62·10-34Дж·с - постоянная Планка,
S -целое(в т.ч.
и
= 6,62·10-34Дж·с - постоянная Планка,
S -целое(в т.ч.
Динамика вращательного движения твердого тела относительно оси
Динамика вращательного движения твердого тела относительно оси
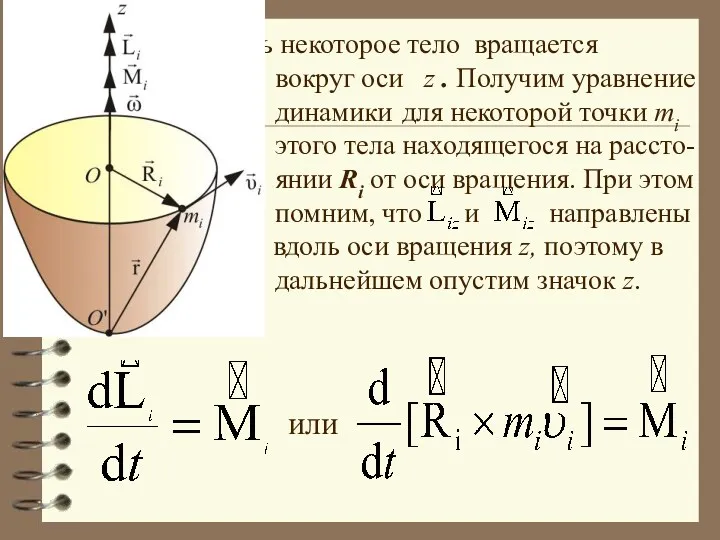
Пусть некоторое тело вращается
вокруг оси z . Получим
Пусть некоторое тело вращается
вокруг оси z . Получим
Так как у всех точек разная, введем, -
вектор угловой скорости причем
Так как у всех точек разная, введем, -
вектор угловой скорости причем
Обозначим Ii – момент инерции точки находящейся на расстоянии Ri от
Обозначим Ii – момент инерции точки находящейся на расстоянии Ri от
Просуммировав по всем i-ым точкам,
получим
или
Это основное уравнение динамики тела
Просуммировав по всем i-ым точкам,
получим
или
Это основное уравнение динамики тела
где – момент импульса тела вращающегося вокруг оси z (Сравним: для
где – момент импульса тела вращающегося вокруг оси z (Сравним: для
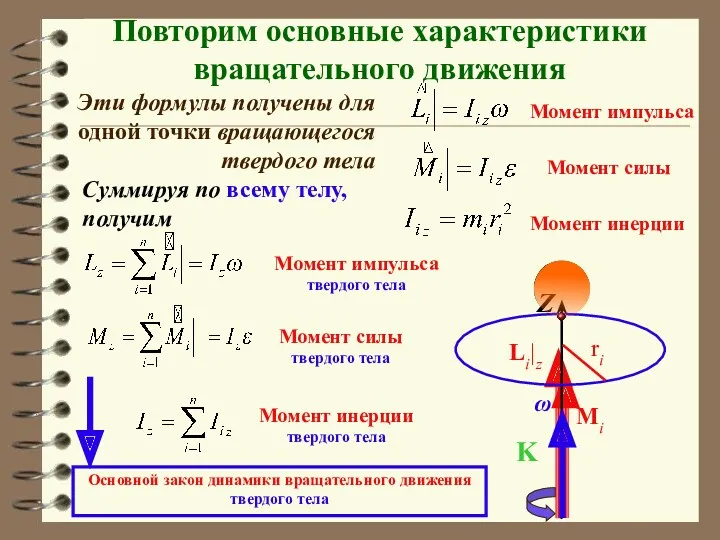
Повторим основные характеристики вращательного движения
Момент импульса
Эти формулы получены для одной точки
Повторим основные характеристики вращательного движения
Момент импульса
Эти формулы получены для одной точки
Расчет моментов инерции некоторых простых тел.
Расчет моментов инерции некоторых простых тел.
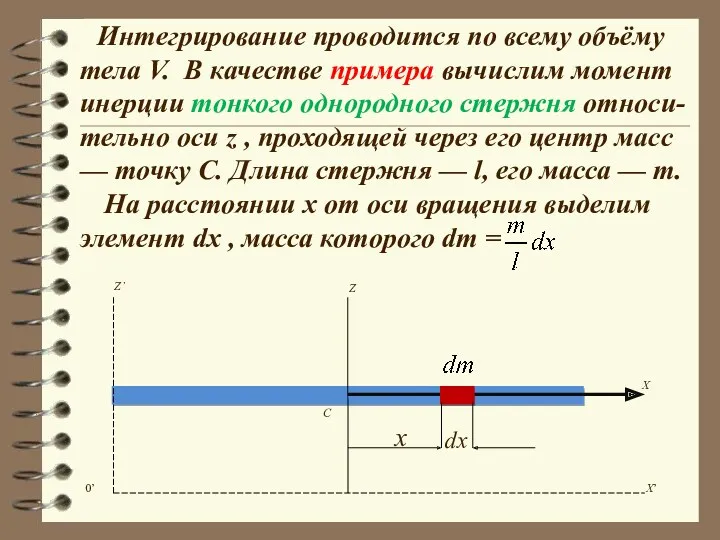
Интегрирование проводится по всему объёму тела V. В качестве примера вычислим
Интегрирование проводится по всему объёму тела V. В качестве примера вычислим
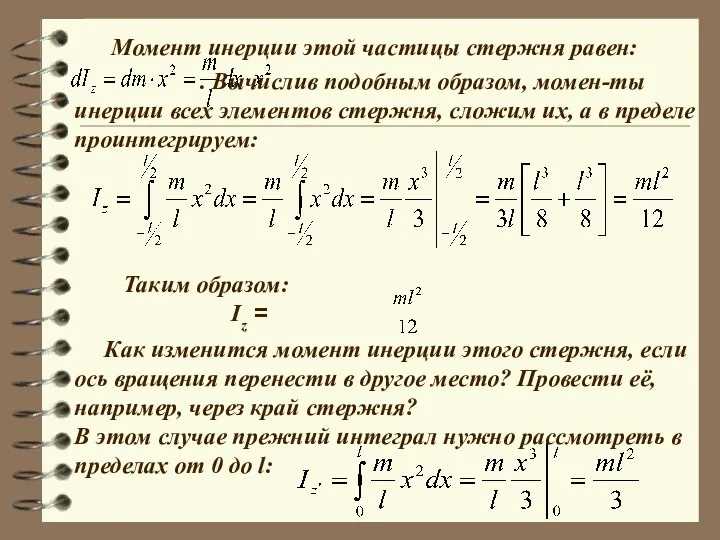
Момент инерции этой частицы стержня равен:
. Вычислив подобным
Момент инерции этой частицы стержня равен:
. Вычислив подобным
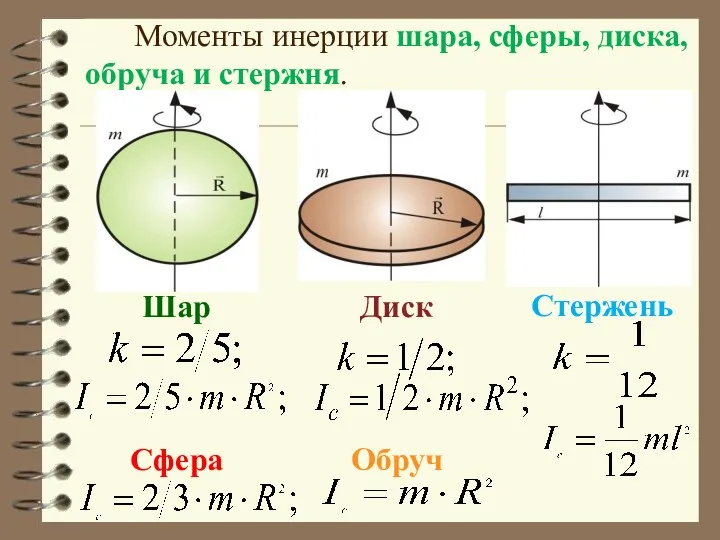
Моменты инерции шара, сферы, диска, обруча и стержня.
Шар
Сфера
Диск
Обруч
Стержень
Моменты инерции шара, сферы, диска, обруча и стержня.
Шар
Сфера
Диск
Обруч
Стержень
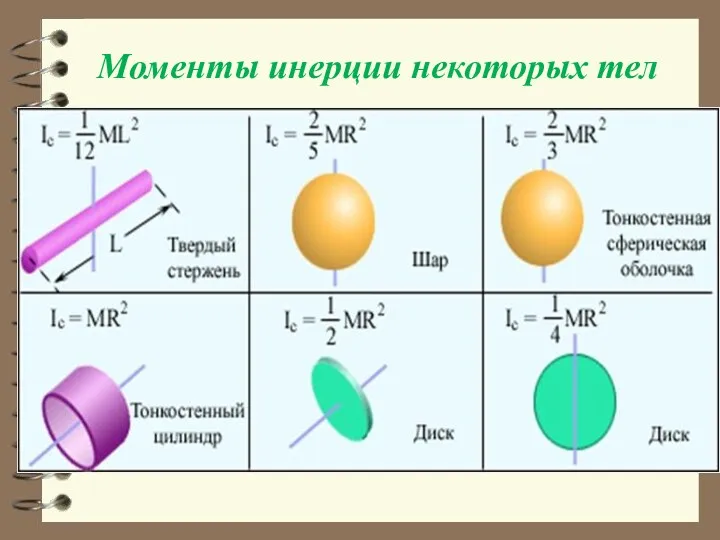
Моменты инерции некоторых тел
Моменты инерции некоторых тел
X
Y
Z
K
ri
ω
ε
При вычислении момента инерции тела, вращающегося вокруг оси, не проходящей через
X
Y
Z
K
ri
ω
ε
При вычислении момента инерции тела, вращающегося вокруг оси, не проходящей через
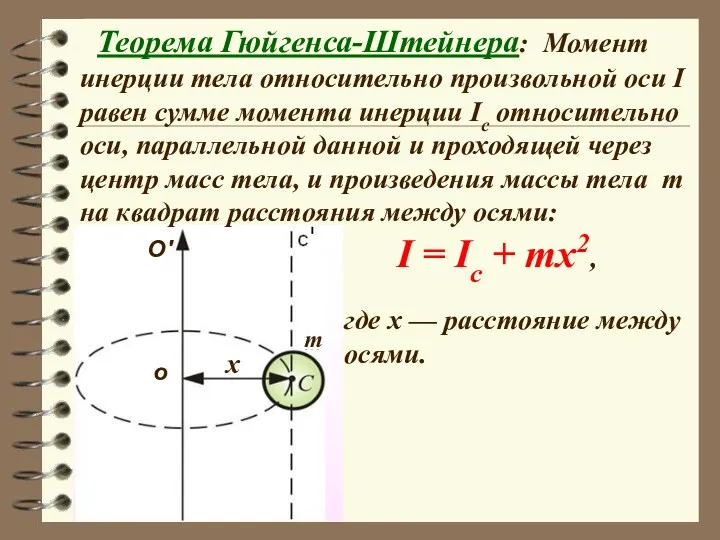
где x — расстояние между
осями.
Теорема Гюйгенса-Штейнера: Момент инерции тела относительно
где x — расстояние между
осями.
Теорема Гюйгенса-Штейнера: Момент инерции тела относительно
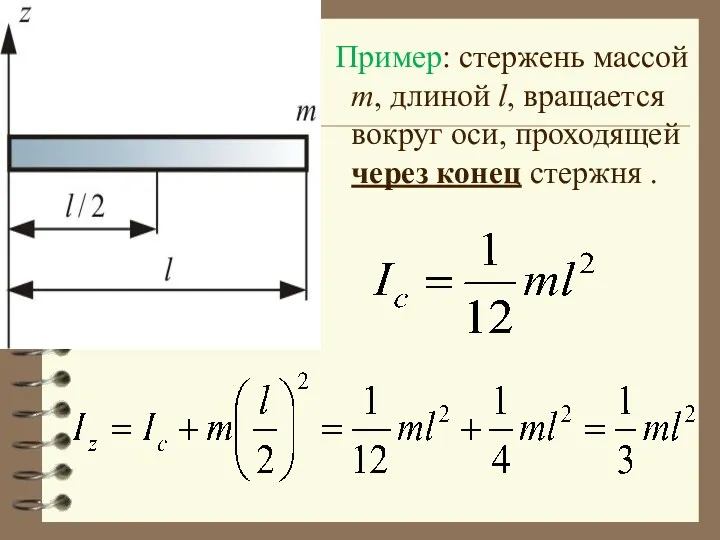
Пример: стержень массой
m, длиной l, вращается
вокруг оси,
Пример: стержень массой
m, длиной l, вращается
вокруг оси,
 Задачи на движение
Задачи на движение Тепловые двигатели
Тепловые двигатели Знакомство с энциклопедией атомной отрасли
Знакомство с энциклопедией атомной отрасли Механические волны
Механические волны Ударно-тяговые устройства подвижного состава
Ударно-тяговые устройства подвижного состава Фазированные антенные решетки и их назначение. Типы диаграммоформирования
Фазированные антенные решетки и их назначение. Типы диаграммоформирования Невесомость
Невесомость Явления смачивания
Явления смачивания Система живлення двигуна УТД-20С1 повітрям
Система живлення двигуна УТД-20С1 повітрям Простые механизмы
Простые механизмы Резание металла
Резание металла Открытие протона и нейтрона. 9 класс
Открытие протона и нейтрона. 9 класс Потенциал. Решение задач
Потенциал. Решение задач Материаловедение. Электромагнитные и теплофизические свойства материалов
Материаловедение. Электромагнитные и теплофизические свойства материалов Магнитное поле в веществе. Лекция 18
Магнитное поле в веществе. Лекция 18 Контроль технического состояния воздушных судов в полете. Тема 6.2
Контроль технического состояния воздушных судов в полете. Тема 6.2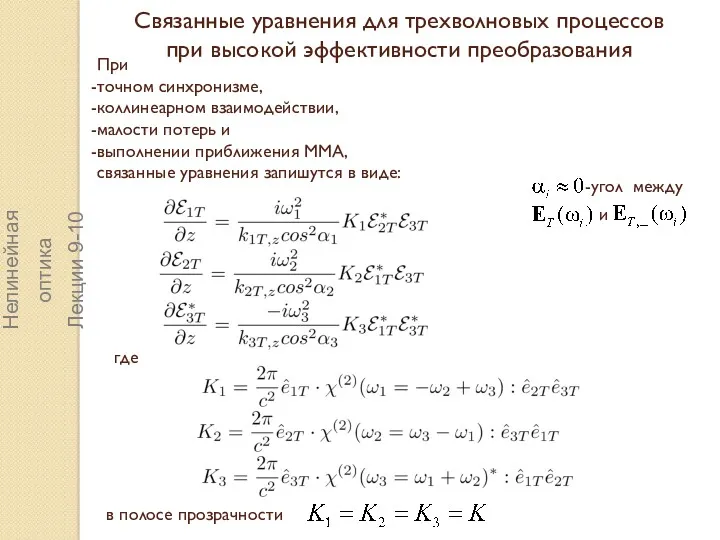 Связанные уравнения для трехволновых процессов при высокой эффективности преобразования
Связанные уравнения для трехволновых процессов при высокой эффективности преобразования Иллюзия
Иллюзия Выбор оборудования для участка ремонта и заряда АКБ легкового автотранспорта
Выбор оборудования для участка ремонта и заряда АКБ легкового автотранспорта Температура. Связь температуры со скоростью теплового движения частиц
Температура. Связь температуры со скоростью теплового движения частиц Электричество и магнетизм
Электричество и магнетизм презентация физика в познании вещества, поля, пространства
презентация физика в познании вещества, поля, пространства Измерение температуры
Измерение температуры Простые световые схемы
Простые световые схемы Применение БИК-спектроскопии при производстве, контроле качества лс и выявлении недоброкачественных и фальсифицированных лс
Применение БИК-спектроскопии при производстве, контроле качества лс и выявлении недоброкачественных и фальсифицированных лс Состояние вещества. Твердые вещества. Фазовый переход. Часть VI
Состояние вещества. Твердые вещества. Фазовый переход. Часть VI Расчет ферм
Расчет ферм Игра Звёздный час по физике
Игра Звёздный час по физике