- Анализ и синтез многосвязных систем управления

Содержание
- 2. Литература Буков В.Н. Буков В. Н. Вложение систем. Аналитический подход к анализу и синтезу матричных систем
- 3. Основные вопросы лекции #1 Основные формы математических моделей динамических систем Постановка задачи синтеза регуляторов SISO-систем. Постановка
- 5. Примеры многосвязных САУ Газотурбинный двигатель (ГТД)
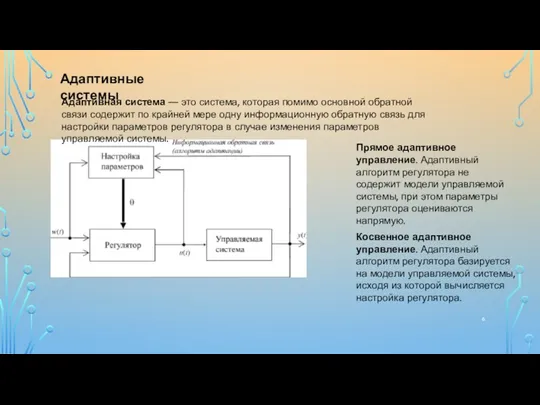
- 6. Адаптивные системы Адаптивная система — это система, которая помимо основной обратной связи содержит по крайней мере
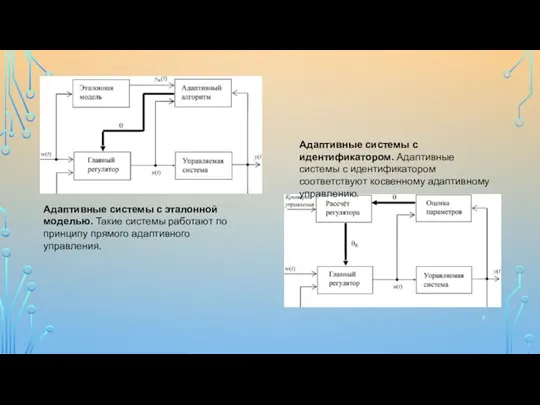
- 7. Адаптивные системы с эталонной моделью. Такие системы работают по принципу прямого адаптивного управления. Адаптивные системы с
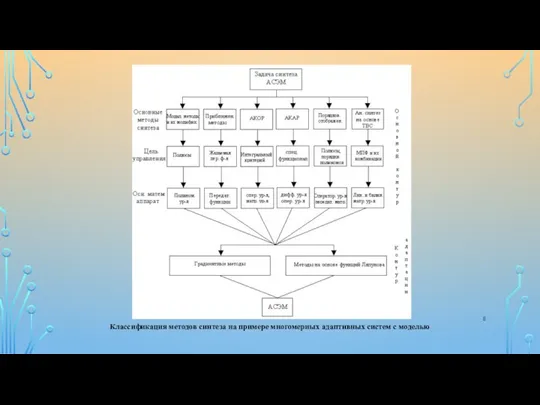
- 8. Классификация методов синтеза на примере многомерных адаптивных систем с моделью
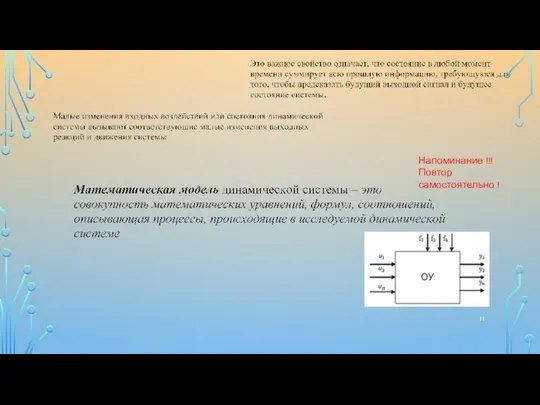
- 11. Напоминание !!! Повтор самостоятельно !
- 12. Наиболее часто используемые, наиболее эффективные способы описания Динамических систем вход – выходное описание (модель типа «вход
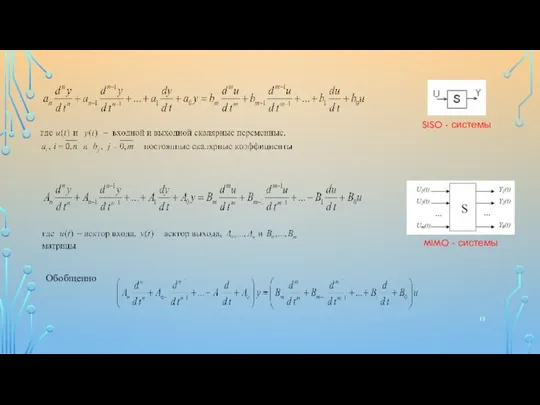
- 13. Обобщенно
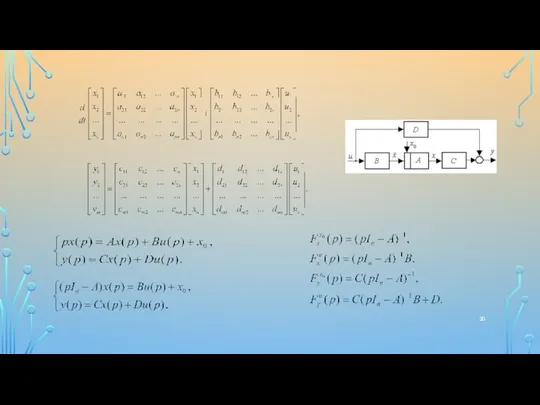
- 14. Решение может быть записано в виде: , Поиск решения уравнения системы − это одна из основных
- 15. В полиномиально-матричной формой где – полиномиальные матрицы соответствующих размеров матрица – квадратная и обратимая, матрица –
- 16. При векторном входе и/или векторном выходе системы можно говорить о матричной передаточной функции Обе факторизации могут
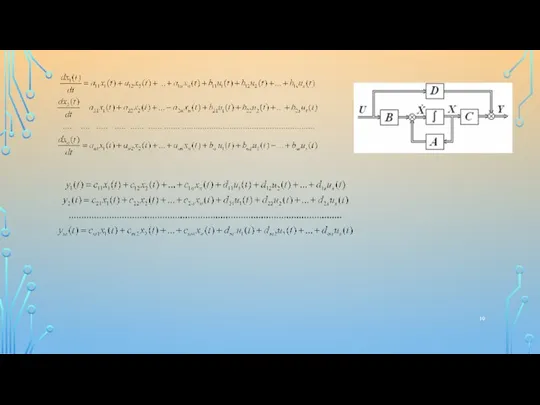
- 17. Описание динамических систем в пространстве состояний Идея
- 18. при нестационарная динамическая система при стационарная динамическая система
- 22. Скачать презентацию
Литература
Буков В.Н. Буков В. Н. Вложение систем. Аналитический подход к анализу
Литература
Буков В.Н. Буков В. Н. Вложение систем. Аналитический подход к анализу
Основные вопросы лекции #1
Основные формы математических моделей динамических систем
Постановка задачи синтеза
Основные вопросы лекции #1
Основные формы математических моделей динамических систем
Постановка задачи синтеза
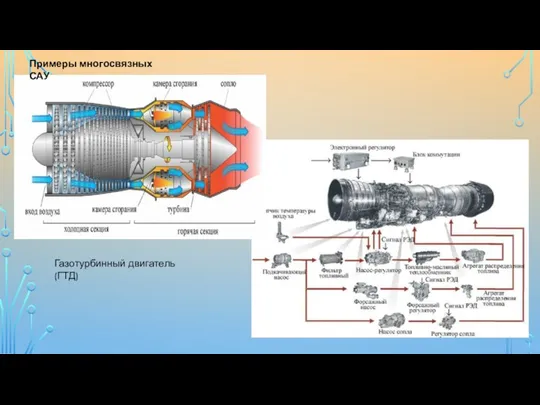
Примеры многосвязных САУ
Газотурбинный двигатель (ГТД)
Примеры многосвязных САУ
Газотурбинный двигатель (ГТД)
Адаптивные системы
Адаптивная система — это система, которая помимо основной обратной связи
Адаптивные системы
Адаптивная система — это система, которая помимо основной обратной связи
Адаптивные системы с эталонной моделью. Такие системы работают по принципу прямого
Адаптивные системы с эталонной моделью. Такие системы работают по принципу прямого
Классификация методов синтеза на примере многомерных адаптивных систем с моделью
Классификация методов синтеза на примере многомерных адаптивных систем с моделью
Напоминание !!!
Повтор самостоятельно !
Напоминание !!!
Повтор самостоятельно !
Наиболее часто используемые, наиболее эффективные способы описания Динамических систем
вход – выходное
Наиболее часто используемые, наиболее эффективные способы описания Динамических систем
вход – выходное
Обобщенно
Обобщенно
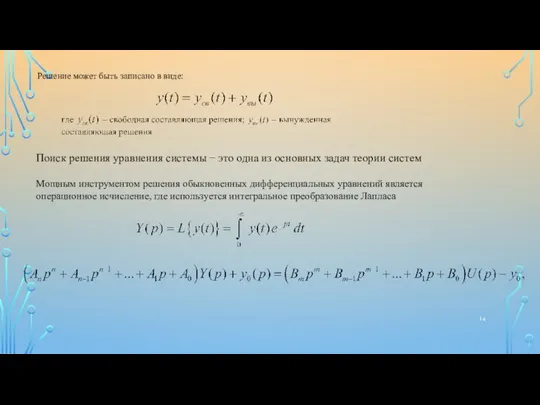
Решение может быть записано в виде:
,
Поиск решения уравнения системы −
Решение может быть записано в виде:
,
Поиск решения уравнения системы −
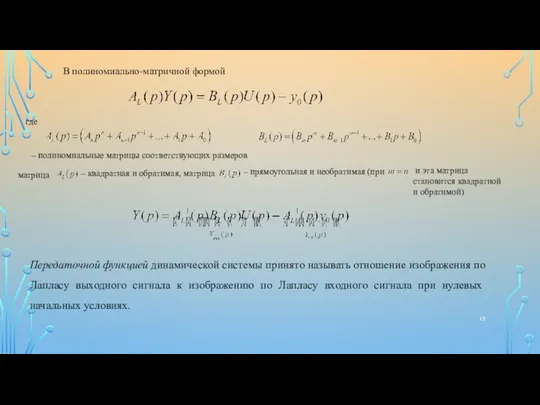
В полиномиально-матричной формой
где
– полиномиальные матрицы соответствующих размеров
матрица
В полиномиально-матричной формой
где
– полиномиальные матрицы соответствующих размеров
матрица
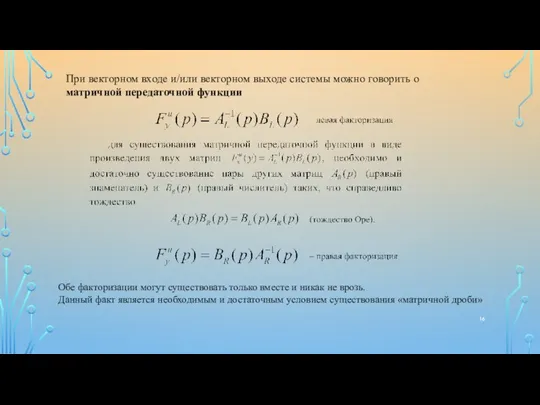
При векторном входе и/или векторном выходе системы можно говорить о матричной
При векторном входе и/или векторном выходе системы можно говорить о матричной
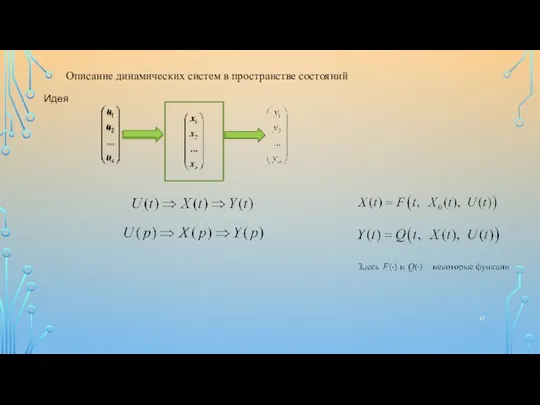
Описание динамических систем в пространстве состояний
Идея
Описание динамических систем в пространстве состояний
Идея
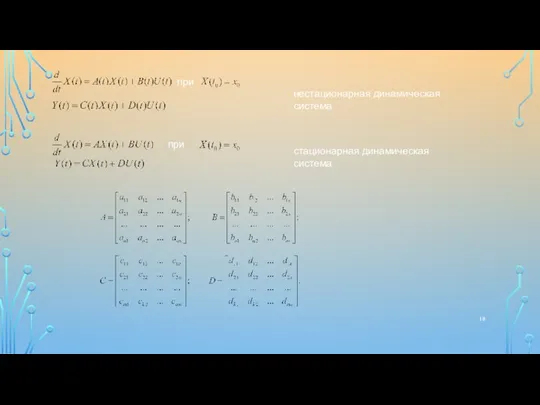
при
нестационарная динамическая система
при
стационарная динамическая система
при
нестационарная динамическая система
при
стационарная динамическая система
 Электростатика
Электростатика Ішкi энергия. Ішкi энергияны өзгерту тәсiлдерi
Ішкi энергия. Ішкi энергияны өзгерту тәсiлдерi Урок-игра по волновой оптике
Урок-игра по волновой оптике 20230316_agregatnoe_sostoyanie_veshchestva_0
20230316_agregatnoe_sostoyanie_veshchestva_0 Электростатика Электрические взаимодействия (часть 1)
Электростатика Электрические взаимодействия (часть 1) Знатоки физики
Знатоки физики Направление тока и направление линий его магнитного поля. (Урок 40)
Направление тока и направление линий его магнитного поля. (Урок 40) Постоянный электрический ток
Постоянный электрический ток Биомеханика. Акустика
Биомеханика. Акустика Молекулярная физика и термодинамика. Молекулярная физика
Молекулярная физика и термодинамика. Молекулярная физика Колебания и волны
Колебания и волны История фрезерного станка
История фрезерного станка Астероиды. Основная информация
Астероиды. Основная информация Характеристики грозовой деятельности и параметры молнии. Первоначальный механизм электризации
Характеристики грозовой деятельности и параметры молнии. Первоначальный механизм электризации Двигатель для перспективного самолёта-штурмовика – турбореактивный двигатель Р-195
Двигатель для перспективного самолёта-штурмовика – турбореактивный двигатель Р-195 Почему корабли не тонут
Почему корабли не тонут Fast and Simple Physics using Sequential Impulses
Fast and Simple Physics using Sequential Impulses Исследование зависимости уровня воды от различных параметров
Исследование зависимости уровня воды от различных параметров Модель малого космического аппарата, движимого солнечным парусом
Модель малого космического аппарата, движимого солнечным парусом Электрический привод
Электрический привод Определение емкостного, индуктивного и полного сопротивления цепи
Определение емкостного, индуктивного и полного сопротивления цепи Автоматизированные системы ультразвукового неразрушающего контроля
Автоматизированные системы ультразвукового неразрушающего контроля Физика. Введение
Физика. Введение Шкала электромагнитных излучений
Шкала электромагнитных излучений Sources of the мagnetic field/
Sources of the мagnetic field/ Закон Бернулли
Закон Бернулли Задачи С1 ЕГЭ по физике
Задачи С1 ЕГЭ по физике Прогнозирование отбраковки деталей при ремонте авиационной техники
Прогнозирование отбраковки деталей при ремонте авиационной техники